Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая гироскоп инерциальный (ГИ), рулевой привод (РП) и головку самонаведения (ГСН), выход "Захват" которой соединен с первым входом первого элемента И и через элемент НЕ с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен с входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен со входом второго усилителя мощности, выходы головки самонаведения "-Y и "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы головки самонаведения "+Z" и "-Z" соединены с входами третьего и четвертого усилителей мощности соответственно, выходы усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены со входом гироскопа инерциального и источником питания бортовой аппаратуры.
Существенным недостатком данной системы является недостаточная точность наведения при использовании в качестве рулевого привода воздушно-динамического привода.
Известна также система наведения управляемого снаряда [2], содержащая рулевой привод, гироскоп инерциальный с датчиком и головку самонаведения, выход "Захват" которой соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" головки самонаведения и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход - со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен с входом второго усилителя мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с четвертым входом гироскопа инерциального и источником питания бортовой аппаратуры, выходы "-Y", "+Y", "+Z" и "-Z" соединены со входами первого, второго, третьего и четвертого расширителей импульсов, а выходы первого и второго расширителей импульсов соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы третьего и четвертого расширителей импульсов соединены со входами третьего и четвертого усилителей мощности соответственно.
Указанная система обладает недостаточной точностью, обусловленной тем, что момент прихода сигнала "Захват", поступающего с головки самонаведения, не совпадает с началом сигнала компенсации веса.
Сигнал по выходу "Захват" головки самонаведения может прийти в произвольный момент времени, например, когда уже прошла половина импульса управления. Тогда вектор управляющей перегрузки будет действовать не строго вертикально вверх, а под углом по отношению к вертикали, что приводит к фазовой ошибке в управлении и, как следствие, к снижению точности наведения.
Задачей предлагаемого изобретения является повышение точности системы наведения за счет исключения команды управления с гироскопа инерциального, начало которой не совпадает с моментом прихода сигнала "Захват" с головки самонаведения.
Для этого в систему наведения управляемого снаряда, содержащую рулевой привод, гироскоп инерциальный с датчиком и головку самонаведения, вход "Компенсация" которой соединен с выходом элемента И, элемент ИЛИ, первый вход которого соединен с выходом первого расширителя импульсов, второй его вход соединен с выходом элемента И, а выход - со входом первого усилителя мощности, выходы головки самонаведения "-Y", "+Y", "+Z" и "-Z" соединены с входами первого, второго, третьего и четвертого расширителей импульсов, выходы третьего и четвертого расширителей импульсов соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых и вход гироскопа инерциального соединены с источником питания бортовой аппаратуры, а выход гироскопа соединен с первым входом элемента И, введен триггер, D-вход которого соединен с выходом "Захват" головки самонаведения, тактовый вход - с выходом гироскопа инерциального, а его выход соединен со вторым входом элемента И, датчик гироскопа инерциального выполнен оптронным, при этом выход второго расширителя импульсов соединен со входом второго усилителя мощности.
На чертеже приведена блок-схема предлагаемой системы, где:
1 - головка самонаведения, выполненная, например, как в прототипе, 2, 3, 4 и 5 - расширители импульсов, выполненные, например, как в прототипе, 6 - гироскоп инерциальный с оптронным датчиком, состоящим из токозадающего резистора 8, светодиода 9, шторки 10, фотодиода 11, нагрузочного резистора 12 и компаратора 13, 7 - рулевой привод, выполненный, например, как в прототипе, 14 - D-триггер, 15 - элемент И, 16 - элемент ИЛИ, 17, 18, 19, 20 - первый, второй, третий и четвертый усилители мощности, выполненные, например, как в прототипе, 21, 22, 23, 24 - обмотки управления рулевого привода.
Работает система наведения следующим образом.
Производится выстрел и снаряд летит по баллистической траектории. В расчетной точке траектории разарретируется и раскручивается ротор гироскопа инерциального 6, выходят на режим батареи питания бортовой аппаратуры и ГСН 1, отделяется блок носовой, открывается входной зрачок ГСН. Под действием вращения снаряда и набором угла пеленга снарядом шторка 10 гироскопа инерциального на частоте вращения снаряда начинает периодически закрывать и открывать световой поток между светодиодом 9 - фотодиодом 11, а на нагрузочном сопротивлении 12 вырабатывается сигнал, близкий к меандру на частоте вращения гироскопа инерциального, который с помощью компаратора 13 нормируется по амплитуде. При этом на выходе "Захват" головки самонаведения присутствует сигнал лог. 0, который, поступая на Д-вход триггера 14, переписывается на его выход по каждому положительному перепаду сигналов с выхода гироскопа инерциального 6 и далее, поступая на второй вход элемента И 15, запрещает проход через него сигналов с выхода гироскопа инерциального 6.
При подлете снаряда к цели и при приеме отраженных от цели импульсов лазерного излучения ГСН формирует сигнал "Захват", который поступает на Д-вход триггера 14, на С-вход которого поступает сигнал с выхода гироскопа инерциального 6. При этом, если в момент появления сигнала с выхода "Захват" головки самонаведения на выходе гироскопа присутствует команда компенсации веса, она не пройдет через элемент И 15. При приходе очередной команды с гироскопа 6 по ее фронту на выходе триггера 14 появляется сигнал лог. 1 (т. к. на входе Д-триггера присутствует сигнал лог. 1 с выхода "Захват" головки самонаведения), который, поступая на второй вход элемента И 15, разрешает проход импульсов с выхода гироскопа инерциального 6 на вход "Компенсация " ГСН и через первый вход элемента ИЛИ 16 на первый усилитель мощности 17 и далее на первую обмотку управления 21 рулевого привода 7. Под действием этого сигнала ось ГСН будет стремиться разворачиваться в вертикальной плоскости вниз, а в ГСН при этом будет вырабатываться сигнал, компенсирующий влияние прецессии, обусловленной сигналом с инерциального гироскопа, при этом сигнал на выходе ГСН в процессе ее слежения за целью будет иметь следующий вид:
J = f(e-é),
где f - функция, определяемая пеленгационной характеристикой ГСН, е - угловая скорость линии "снаряд-цель", é - угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
Указанный сигнал является исходным для формирования импульсов управления рулевым приводом автопилота (сигналов, вырабатываемых ГСН по выходам +Y, -Y, +Z, -Z).
В начальный момент, когда начальное угловое рассогласование оптической оси головки самонаведения с направлением на цель максимально, головка выдает максимальные по длительности команды, которые, поступая на расширители импульсов 2-5, проходят через них без изменения и далее поступают через усилители мощности 17-20 на обмотки управления 21-24 рулевым приводом 7, что приводит к отклонению рулей рулевого привода. Под действием управляющей перегрузки вектор скорости снаряда приближается к направлению линии визирования головки самонаведения снаряд-цель, что приводит к уменьшению углового рассогласования оптической оси головки самонаведения с направлением на цель. В процессе уменьшения этой ошибки команды по выходам головки самонаведения уменьшаются по длительности. И в тот момент, когда их длительность становится меньше времени срабатывания рулевого привода, расширители импульсов начинают их расширять до величины, при которой потери коэффициента команды близки к 1.
Т.о., за счет исключения фазовой ошибки, вызванной не совпадением прихода сигнала компенсации веса с гироскопа инерциального и сигнала "Захват" в начальный момент наведения, удалось повысить точность наведения системы.
Источники информации
1. "152-мм выстрел 3ВОФ64(3ВОФ93) с осколочно-фугасным управляемым снарядом 3ОФ39 и зарядом 1 (Уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации 3ВОФ64.00.00.000ТО (3ВОФ93.00.00.000ТО)". Москва. Военное издательство. 1990 г., стр. 59-64.
2. Патент РФ 2138768 от 27.09.1999 г., МКП 6 F 42 В l5/01.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2187781C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Техническим результатом является повышение точности наведения. Технический результат достигается тем, что система наведения управляемого снаряда содержит рулевой привод, гироскоп инерциальный и головку самонаведения, вход "Компенсация" которой соединен с выходом элемента И, элемент ИЛИ, первый вход которого соединен с выходом первого расширителя импульсов, второй его вход соединен с выходом элемента И, а выход - со входом первого усилителя мощности. Выходы головки самонаведения "-Y", "+Y", "+Z" и "-Z" соединены со входами первого, второго, третьего и четвертого расширителей импульсов, выходы третьего и четвертого расширителей импульсов соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых и вход гироскопа инерциального соединены с источником питания бортовой аппаратуры. Выход гироскопа соединен с первым входом элемента И. Введен триггер, D-вход которого соединен с выходом "Захват" головки самонаведения, тактовый вход - с выходом гироскопа инерциального, а его выход соединен со вторым входом элемента И. В гироскопе установлены шторка, светодиод и фотодиод с образованием оптронной связи между ними. Шторка выполнена с возможностью вращения на частоте вращения снаряда. Фотодиод соединен с выходом гироскопа. 1 ил.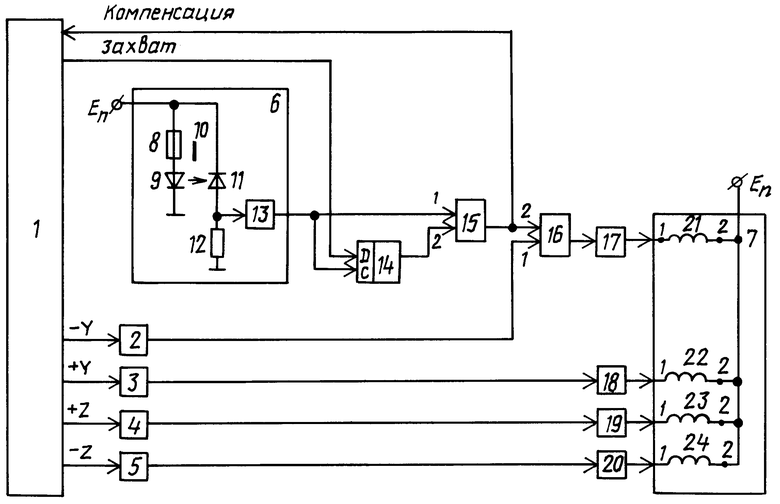
Система наведения управляемого снаряда, содержащая рулевой привод, гироскоп инерциальный и головку самонаведения, вход "Компенсация" которой соединен с выходом элемента И, элемент ИЛИ, первый вход которого соединен с выходом первого расширителя импульсов, второй его вход соединен с выходом элемента И, а выход - со входом первого усилителя мощности, выходы головки самонаведения "-Y", "+Y", "+Z", "-Z" cоединены со входами первого, второго, третьего и четвертого расширителей импульсов, выходы третьего и четвертого расширителей импульсов соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых и вход гироскопа инерциального соединены с источником питания бортовой аппаратуры, а выход гироскопа соединен с первым входом элемента И, отличающаяся тем, что в нее введен триггер, D-вход которого соединен с выходом "Захват" головки самонаведения, тактовый вход - с выходом гироскопа инерциального, а его выход соединен со вторым входом элемента И, при этом выход второго расширителя импульсов соединен со входом второго усилителя мощности, при этом в гироскопе инерциальном установлены шторка, светодиод и фотодиод с образованием оптронной связи между ними, причем шторка выполнена с возможностью вращения на частоте вращения снаряда и периодического перекрытия светового потока между светодиодом и фотодиодом, при этом фотодиод соединен с выходом гироскопа инерциального.
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| 00.00.000ТО) | |||
| - М.: Военное издательство, 1990, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| US 4588145, 13.05.1986 | |||
| DE 3414911 А1, 24.10.1985 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРЯЖЕННОГО СОСТОЯНИЯ КОНСТРУКЦИЙ ЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2003 |
|
RU2226641C1 |

