Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая рулевой привод (РП), гироскоп инерциальный с датчиком (ГИ), часовой механизм и головку самонаведения (ГСН), выход "Захват" которой соединен с первым входом первого элемента И и через элемент НЕ с первым входом второго элемента И, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход с входом первого усилителя мощности, выход второго элемента И соединен с вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен с входом второго усилителя мощности, выходы головки самонаведения "-Y" и "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы головки самонаведения "+Z" и "-Z" соединены с входами третьего и четвертого усилителей мощности соответственно, выходы усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с входом запитки гироскопа инерциального и источником питания бортовой аппаратуры, а вход механизма разарретирования гироскопа инерциального соединен с выходом часового механизма.
Существенным недостатком данной системы является недостаточная точность наведения, связанная с тем, что при больших дальностях стрельбы, когда продолжительность работы гироскопа инерциального после его разарретирования максимальна, он начинает вносить дополнительную фазовую ошибку, связанную с уходом его оси относительно ее положения на момент разарретирования. Это приводит к дополнительной ошибке вывода снаряда в зону "Захвата" цели на участке инерциального наведения, что увеличивает время выбора начального промаха снаряда, а также приводит к увеличению ошибки при формировании команды компенсации силы тяжести на участке самонаведения. Все это приводит к снижению точности наведения указанной системы наведения.
Задачей предлагаемого изобретения является повышение точности системы наведения за счет компенсации фазового ухода оси гироскопа на всем промежутке полета снаряда.
Для этого в систему наведения управляемого снаряда, содержащую рулевой привод, гироскоп инерциальный с датчиком, часовой механизм и головку самонаведения, выход "Захват" которой соединен с вторым входом элемента И, выход которого соединен с входом "Компенсация" головки самонаведения и первым входом элемента ИЛИ, второй вход которого соединен с выходом "-Y" головки самонаведения, а выход соединен с входом первого усилителя мощности, выходы головки самонаведения "+Z" и "-Z" соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых и вход запитки гироскопа инерциального соединены с источником питания бортовой аппаратуры, а вход механизма разарретирования гироскопа инерциального соединен с выходом часового механизма, введено устройство сдвига фазы, первый вход которого соединен с выходом гироскопа инерциального, второй вход его соединен с выходом часового механизма, а выход устройства сдвига фазы соединен с первым входом элемента И, выход головки самонаведения "+Y" соединен со входом второго усилителя мощности, а датчик гироскопа инерциального выполнен оптронным.
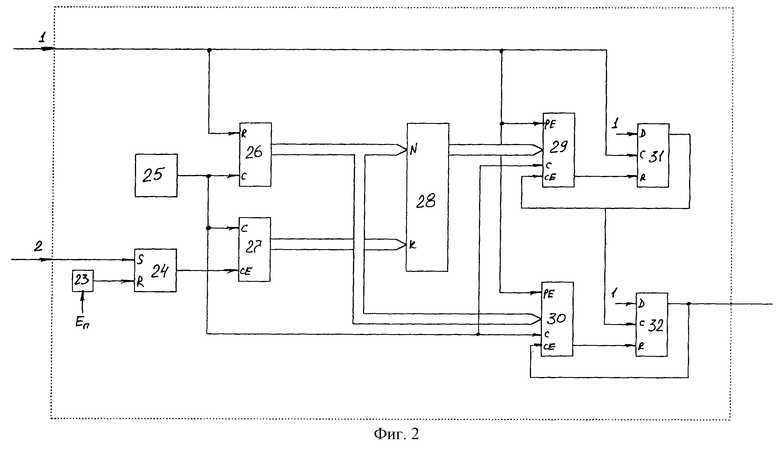
При этом устройство сдвига фазы содержит первый, второй и третий триггера, блок обнуления, первый, второй, третий и четвертый счетчики импульсов, генератор опорной частоты и постоянное запоминающее устройство, причем первый вход устройства сдвига фазы соединен с входом установки в ноль первого счетчика импульсов, входами перезаписи третьего и четвертого счетчиков импульсов и тактовым входом второго триггера, второй вход устройства сдвига фазы соединен с входом установки первого триггера, вход сброса которого соединен с выходом блока обнуления, выход первого триггера соединен с входом разрешения счета второго счетчика импульсов, выходы которого соединены со старшей частью адресов постоянного запоминающего устройства, младшая часть которых соединена с выходами первого счетчика импульсов и входами данных четвертого счетчика импульсов, выходы постоянного запоминающего устройства соединены с входами данных третьего счетчика импульсов, выход переноса которого соединен с входом сброса второго триггера, выход которого соединен с входом разрешения счета третьего счетчика импульсов и тактовым входом третьего триггера, выход которого соединен с входом разрешения счета четвертого счетчика импульсов и выходом устройства, а тактовые входы первого, второго, третьего и четвертого счетчиков импульсов соединены с выходом генератора опорной частоты, а на D-входы второго и третьего триггеров поданы уровни лог.1.
На фиг.1 приведена блок-схема предлагаемой системы, где 1 - головка самонаведения, выполненная, например, как в прототипе, 2 - часовой механизм, выполненный, например, как в прототипе, 3 - гироскоп инерциальный с оптронным датчиком, состоящим из светодиода 17, токозадающего резистора 18, шторки 19, фотодиода 20, нагрузочного резистора 21, компаратора 22 и электровоспламенителя арретира 16, 4 - рулевой привод, выполненный, например, как в прототипе, 5 - устройство сдвига фазы, выполненное, например, как показано на фиг.2, и содержит первый 24, второй 31, третий 32 триггера, первый 26, второй 27, третий 29 и четвертый 30 счетчики импульсов, генератор опорной частоты 25, блок обнуления 23 и постоянное запоминающее устройство 28, 6 - элемент И, 7 - элемент ИЛИ, 8, 9, 10, 11 - первый, второй, третий и четвертый усилители мощности, 12, 13, 14, 15 - первая, вторая, третья и четвертая обмотки управления рулевого привода.
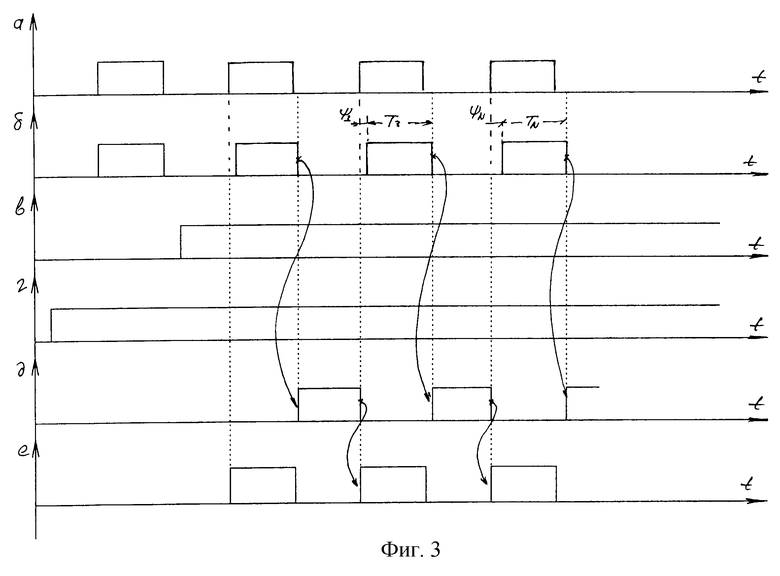
На фиг.3 приведены диаграммы работы устройства.
Работает система наведения следующим образом.
Производится выстрел и снаряд летит по баллистической траектории. В расчетной точке траектории на выходе часового механизма 2 формируется импульс тока, по которому разарретируется и раскручивается ротор гироскопа инерциального 3, выходят на режим батареи питания бортовой аппаратуры и ГСН 1, отделяется блок носовой, открывается входной зрачок ГСН.
Под действием вращения снаряда и набором угла пеленга снарядом шторка 19 гироскопа инерциального на частоте вращения снаряда начинает периодически закрывать и открывать световой поток между светодиодом 17 - фотодиодом 20, а на нагрузочном сопротивлении 21 вырабатывается близкий к меандру сигнал компенсации силы тяжести на частоте вращения снаряда, который с помощью компаратора 22 нормируется по амплитуде (фиг.3а).
При этом с течением времени работы гироскопа инерциального 3 скорость вращения его ротора уменьшается, что приводит к уменьшению его кинетического момента, к увеличению ухода в вертикальной плоскости вслед за баллистическим разворотом снаряда и, как следствие, к увеличению фазового запаздывания при формировании сигнала компенсации силы тяжести относительно исходного на момент разарретирования положения (фиг.3б). Причем чем больше время полета снаряда, тем больше величина фазового запаздывания.
Одновременно сигнал разарретирования гироскопа инерциального с выхода часового механизма 2 поступает на второй вход устройства сдвига фазы 5 (на вход установки триггера 24, который находился в исходном состоянии под действием сигнала с блока обнуления 23) и устанавливает триггер 24 в единичное состояние (фиг. 3д). Сигнал лог. 1 с выхода триггера 24 поступает на вход разрешения счета счетчика 27, на тактовый вход которого поступает сигнал с генератора опорной частоты 25. При этом на выходе второго счетчика импульсов 27 формируется код, соответствующий текущему времени работы гироскопа инерциального, который поступает на старшую часть адресов постоянного запоминающего устройства 28.
Сигнал лог.1 компенсации силы тяжести с выхода гироскопа инерциального 3 (фиг. 3б), равный половине периода вращения снаряда, поступает через первый вход устройства сдвига фазы 5 на вход сброса первого счетчика импульсов 26, разрешая его работу. В счетчике 26 идет подсчет импульсов, поступающих на его тактовый вход с выхода генератора опорной частоты 25. К моменту поступления заднего фронта сигнала компенсации силы тяжести с гироскопа инерциального на выходе счетчика импульсов 26 будет присутствовать код, соответствующий половине периода вращения снаряда. Этот код поступает на младшую часть адресов постоянного запоминающего устройства 28.
Т.о. к моменту поступления заднего фронта каждого импульса сигнала компенсации силы тяжести с выхода гироскопа инерциального 3 на адресных входах постоянного запоминающего устройства 28 присутствует информация о текущем времени работы гироскопа инерциального и о периоде вращения снаряда. Информация о периоде вращения снаряда необходима, т.к. частота вращения снаряда за время полета может изменяться в широких пределах.
Частота вращения снаряда не может резко измениться, т.е. можно считать, что соседние периоды вращения снаряда не могут значительно отличаться друг от друга (т.е. они равны), и т.о. мы можем задержать входной сигнал ровно на период без потери точности формирования команд управления. А внося в сигнал задержку, равную 360o, за вычетом необходимого опережения, равного фазовому уходу гироскопа, мы таким образом полностью компенсируем уход гироскопа.
В постоянном запоминающем устройстве 28 происходит вычисление табличным способом (эта таблица заносится в постоянное запоминающее устройство на этапе изготовления бортовой аппаратуры) величины фазового сдвига, который надо внести на текущий момент времени в сигнал, поступающий с выхода гироскопа инерциального, чтобы компенсировать фазовое запаздывание, которое он вносит в работу системы наведения в процессе полета снаряда.
Т. е. к моменту поступления заднего фронта импульса сигнала компенсации силы тяжести с выхода гироскопа инерциального 3 на выходе постоянного запоминающего устройства 28 присутствует код
L=N-(N•f(K))/180o,
где код на выходе первого счетчика импульсов 26, равный половине периода вращения снаряда, К - код на выходе второго счетчика импульсов 27, пропорциональный текущему времени работы гироскопа инерциального, f(K) - закон, определяющий уход (фазовый сдвиг) гироскопа инерциального от времени его работы. Закон ухода зависит от конструктивных особенностей гироскопа инерциального и в первом приближении может быть представлен в виде линейной функции. Величина L эквивалентна длительности, равной 180o периода вращения снаряда за вычетом фазового сдвига на данной (измеренной) частоте вращения снаряда.
Т.о. на выходе постоянного запоминающего устройства 28 присутствует код, определяющий величину необходимого опережения выходного сигнала, которая необходима, чтобы компенсировать вносимую гироскопом фазовую ошибку, а точнее величина задержки, равная 180o за вычетом необходимого опережения, равного фазовому уходу гироскопа.
По заднему фронту сигнала с выхода гироскопа инерциального 3 этот код (L) с выхода постоянного запоминающего устройства переписывается в третий счетчик импульсов 29, а код о половине периода вращения снаряда переписывается в четвертый счетчик импульсов 30. Кроме того, по этому сигналу на выходе второго триггера 31 устанавливается сигнал лог.1 (фиг.3е), который, поступая на вход разрешения третьего счетчика импульсов 29, разрешает его работу по тактовому входу. Сигнал с выхода второго триггера поступает также на тактовый вход третьего триггера 32, но не изменяет его состояния.
В тот момент времени, когда третий счетчик импульсов насчитает время равное T-t, где Т - половина периода следования импульсов с гироскопа инерциального(эквивалентно коду N), t - время, эквивалентное необходимому фазовому опережению сигнала, на его выходе переноса вырабатывается импульс. Этот сигнал, поступая на вход сброса второго триггера 31, установит на его выходе сигнал лог.1. По этому сигналу, поступающему на тактовый вход третьего триггера 32, на выходе третьего триггера устанавливается сигнал лог.1 (фиг. 3ж), который поступает на выход устройства сдвига фазы и на вход разрешения работы четвертого счетчика импульсов 30, в котором записан код, соответствующий половине периода вращения снаряда. При отсчете четвертым счетчиком импульсов этого времени на его выходе формируется импульс переноса, который устанавливает третий триггер 32 в нулевое состояние.
Одновременно при поступлении сигнала лог. 1 на вход устройства сдвига фазы идет измерение очередного полупериода сигнала с выхода гироскопа инерциального.
Т. о. на выходе устройства сдвига фазы формируется сигнал, сдвинутый относительно входного сигнала на 360-ψ, но т.к. периоды соседних оборотов снаряда равны, то имеется опережение выходного сигнала относительно входного на заданную величину ψ, зависящую от текущего времени работы гироскопа инерциального.
И мы имеем на выходе устройства сдвига фазы сигнал, который скомпенсировал вносимый гироскопом фазовый уход.
Этот сигнал с выхода устройства сдвига фазы 5 поступает на первый вход элемента И 6. Но т.к. на выходе "Захват" (фиг.3в) головки самонаведения 1 присутствует сигнал лог. 0, который, поступая на второй вход элемента И 6, запрещает прохождение через него сигналов с выхода устройства сдвига фазы и, следовательно, с выхода гироскопа инерциального.
При подлете снаряда к цели и при приеме отраженных от цели импульсов лазерного излучения ГСН формирует сигнал "Захват" (фиг.3в), который, поступая на второй вход элемента И 6, разрешает прохождение сигналов с выхода устройства сдвига фазы и т. о. с выхода гироскопа инерциального 3 на вход "Компенсация" ГСН (фиг.3г) и через первый вход элемента ИЛИ 7 на первый усилитель мощности 8 и далее на первую обмотку управления 12 рулевого привода 4.
Под действием этого сигнала ось головки самонаведения 1 будет стремиться разворачиваться в вертикальной плоскости вниз. И в головке самонаведения при этом будет вырабатываться сигнал, компенсирующий влияние прецессии, обусловленной сигналом с инерциального гироскопа 3 (с выхода устройства сдвига фазы 5), при этом сигнал на выходе головки самонаведения в процессе ее слежения за целью будет иметь следующий вид:
где f - функция, определяемая пеленгационной характеристикой головки самонаведения; угловая скорость линии "снаряд-цель";
угловая скорость линии "снаряд-цель"; угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
Указанный сигнал является исходным для формирования импульсов управления рулевым приводом автопилота (сигналов, вырабатываемых головкой самонаведения по выходам +У,-У.+Z,-Z).
Эти сигналы поступают на усилители мощности 8-11 и далее на обмотки управления 12-15 рулевым приводом 4, что приводит к отклонению рулей рулевого привода. Под действием управляющей перегрузки вектор скорости снаряда приближается к направлению линии визирования головки самонаведения снаряд-цель, что приводит к уменьшению углового рассогласования оптической оси головки самонаведения с направлением на цель.
Т. о. за счет компенсации фазового ухода гироскопа инерциального удалось повысить точность наведения системы.
Источники информации
1. "152-мм выстрел ЗВОФ64 (ЗВОФ93) с осколочно фугасным управляемым снарядом 30Ф39 и зарядом 1 (уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации ЗВОФ64.00.00.000ТО (ЗВОФ93.00.00.000ТО)". - М.: Военное издательство, 1990, с.59-64.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2187781C2 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
Изобретение относится к вооружению, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Технический результат - повышение точности наведения. Система управляемого снаряда содержит рулевой привод, гироскоп инерциальный с датчиком, часовой механизм и головку самонаведения, выход "Захват" которой соединен со вторым входом элемента И, выход которого соединен со входом "Компенсация" головки самонаведения и первым входом элемента ИЛИ, второй вход которого соединен с выходом "-Y" головки самонаведения, а выход соединен со входом первого усилителя мощности. Выходы головки самонаведения "Z" и "-Z" соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых и вход запитки гироскопа инерциального соединены с источником питания бортовой аппаратуры. Вход механизма разаретирования гироскопа инерциального соединен с выходом часового механизма, введено устройство сдвига фазы, первый вход которого соединен с выходом гироскопа инерциального, второй его вход соединен с выходом часового механизма. Выход устройства сдвига фазы соединен с первым входом элемента И, выход головки самонаведения "+Y" соединен со входом второго усилителя мощности. Датчик гироскопа инерциального выполнен оптронным, а устройство сдвига фазы содержит первый, второй и третий триггеры, блок обнуления, первый, второй, третий и четвертый счетчики импульсов, генератор опорной частоты и постоянное запоминающее устройство. 1 з.п.ф-лы, 3 ил.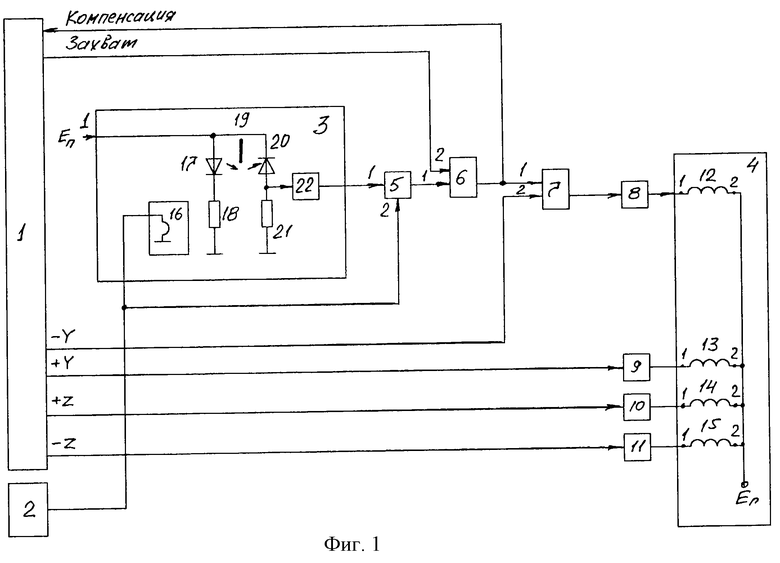
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| - М.: Военное издательство, 1990, с.35-64 | |||
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ КЛАССА ВОЗДУХ - ПОВЕРХНОСТЬ | 1997 |
|
RU2111439C1 |
| US 5042742, 27.08.1991 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
