Использование: в авиационном приборостроении, в частности в информационных средствах навигации, прицеливания и пилотирования летательных аппаратов (ЛА), и предназначено для повышения точности и устойчивости определения комплексной системой "Доплеровский измеритель скорости и угла сноса (ДИСС) - Гироинерциальная навигационная система (ГИНС)" вектора абсолютной линейной скорости, в том числе и маневрирующего ЛА. Сущность: по данным от ГИНС вычисляют ожидаемое значение скорости сближения по каждому коммутируемому в данный момент лучу ДИСС. С одной стороны, этим сигналом управляют перестраиваемым генератором доплеровской частоты, если текущее измерение не состоялось. Если измерение произошло, вычисляют невязку между измеренным и ожидаемым значением скорости сближения. Представляют эту невязку по составляющим в системе координат, связанной вектором абсолютной скорости. Набирают статистику невязок, учитывая все измерения, и обрабатывают ее методом "скользящего среднего". Полученный вектор оценок невязок-ошибок используют для более точной и устойчивой коррекции ГИНС. Комплексная система, реализующая способ, содержит ДИСС, ГИНС, блок преобразования координат, алгебраический сумматор, блок статистической обработки, вычислитель матрицы аналитического перехода, вычислитель скорости сближения и вычислитель матрицы перехода лучевой. Технический результат: повышение точности и устойчивости определения вектора абсолютной линейной скорости. 2 с.п. ф-лы, 2 ил.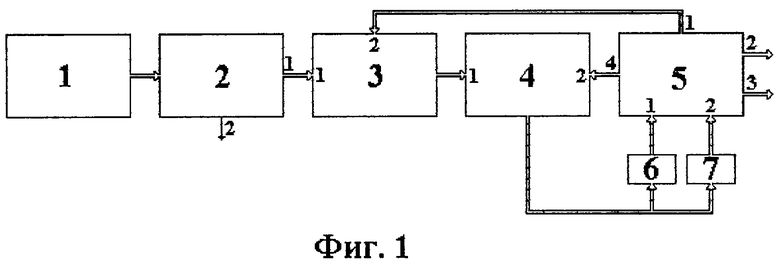
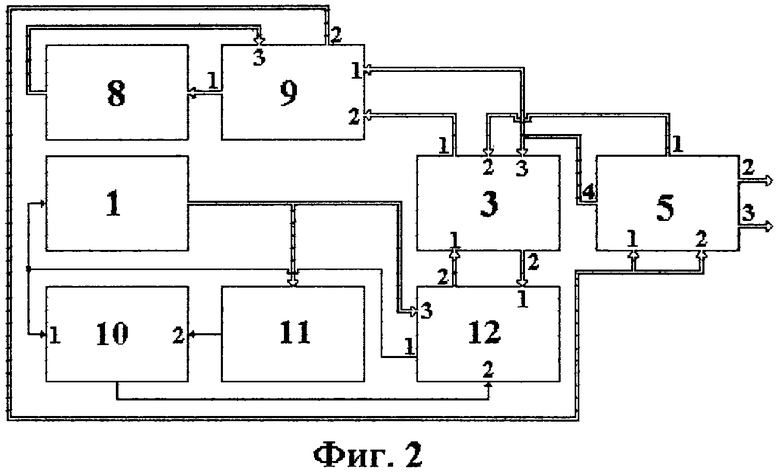
1. Способ определения вектора абсолютной линейной скорости летательного аппарата, заключающийся в том, что на борту с помощью многолучевого доплеровского измерителя скорости и угла сноса определяют доплеровские частоты по каждому из последовательно коммутируемых приемопередающих радиолокационных лучей, на основании этих измерений корректируют первую и вторую ступени интеграторов гироинерциальной навигационной системы и на ее выходе получают уточненное значение вектора абсолютной линейной скорости летательного аппарата, отличающийся тем, что по данным от гироинерциальной навигационной системы о текущем значении углов курса, тангажа, крена, трехмерного вектора абсолютной скорости вычисляют ожидаемое значение скорости сближения по каждому коммутируемому в данный момент лучу и, с одной стороны, этим сигналом управляют перестраиваемым генератором доплеровской частоты, если текущее измерение не состоялось, и, с другой стороны, если измерение произошло, вычисляют невязку между измеренным и ожидаемым значениями скоростей сближения, представляют эту невязку по составляющим в правой прямоугольной системе координат, ось абсцисс которой направлена по вектору абсолютной скорости, а ось ординат находится в вертикальной плоскости и перпендикулярна оси абсцисс, набирают статистику невязок по составляющим в этой системе координат, учитывая все измерения, обрабатывают набранную статистику по составляющим методом "скользящего среднего" на ограниченной выборке, представляют вектор оценок невязок-ошибок по составляющим в гироинерциальной системе координат и используют его составляющие для более точной и устойчивой коррекции гироинерциальной навигационной системы. 2. Комплексная система определения вектора абсолютной линейной скорости летательного аппарата, содержащая доплеровский измеритель скорости и угла сноса, гироинерциальную навигационную систему, блок преобразования координат, алгебраический сумматор, отличающаяся тем, что в нее дополнительно введены блок статистической обработки, вычислитель матрицы аналитического перехода, вычислитель скорости сближения, вычислитель матрицы перехода лучевой, при этом выход доплеровского измерителя скорости и угла сноса связан с третьим входом вычислителя матрицы перехода лучевой и входом вычислителя скорости сближения, выход которого соединен со вторым входом алгебраического сумматора, первый выход гироинерциальной навигационной системы подключен к второму входу блока преобразования координат, а четвертый к первому входу вычислителя матрицы аналитического перехода и третьему входу блока преобразования координат, блок преобразования координат первым выходом связан с вторым входом вычислителя матрицы аналитического перехода, вторым выходом - с первым входом вычислителя матрицы перехода лучевой, вычислитель матрицы перехода лучевой первым выходом соединен с входом доплеровского измерителя скорости и угла сноса и первым входом алгебраического сумматора, вторым выходом - с первым входом блока преобразования координат, вторым входом - с выходом алгебраического сумматора, вычислитель матрицы аналитического перехода первым выходом подключен к входу, а третьим входом к выходу блока статистической обработки, вторым выходом - к первому и второму входам гироинерциальной навигационной системы для коррекции его первой и второй ступеней интеграторов, второй выход гироинерциальной навигационной системы связан с бортовыми потребителями информации о векторе абсолютной линейной скорости летательного аппарата.