Изобретение относится к авиационному приборостроению, в частности к информационным средствам прицеливания и группового пилотирования летательных аппаратов.
Патентный поиск в ВПТБ по классификациям "Прицелы и их детали" МПК F 41 G 1/00-1/54, 3/16, 3/24, 11/00, "Измерение с помощью гироскопического эффекта" G 01 Р 9/00-9/04, "Измерение параметров полета самолетов, линейные" В 64 Д 43/02, G 01 Р 3/00-3/80, "Навигационные, связанные с измерением скорости или ускорения" G 01 С 21/10-21/18, "Комбинированные для измерения двух и более параметров движения" G 01 С 23/00 не позволил найти явных ни аналогов, ни прототипа. Поэтому в качестве прототипа взят способ, указанный в [1], стр. 43-49, для устройства, изложенное в [2], стр. 163, 164.
Известный способ заключается в том, что на борту ЛА O(τ) с помощью радиолокационной или/и электронно-оптической системы (на фиг. 3, блок 1) непрерывно сопровождают объект Oб(τ) (фиг. 1) и измеряют:
- вектор относительной дальности до объекта D(τ)
D(τ) = {D(τ),β(τ),ϕ(τ)},
где D(τ) - модуль вектора относительной дальности, измеряемый дальномерным каналом - первый выход блока 1,
β(τ),ϕ(τ) - углы пеленга, то есть ориентации системы координат, связанной с антенной/головкой радиолокационной/электронно-оптической системой O(τ)XD(τ)YD(τ)ZD(τ) относительно конструкции ЛА (связанной системы координат O(τ)X1(τ)Y1(τ)Z1(τ), измеряемых с помощью, например, потенциометрических датчиков угломерных каналов - девятый и десятый выходы блока 1 соответственно;
-  - скорость и ускорение сближения с объектом (первую и вторую локальные производные относительной дальности D(τ) - второй и третий выходы блока 1;
- скорость и ускорение сближения с объектом (первую и вторую локальные производные относительной дальности D(τ) - второй и третий выходы блока 1;
- ωD(τ) - вектор абсолютной угловой скорости вращения вектора D(τ) по составляющим ωXD(τ),ωYD(τ),ωZD(τ) - в проекциях на оси системы координат O(τ)XD(τ)YD(τ)ZD(τ) с помощью, например, скоростных гироскопов, устанавливаемых на антенне / головке радиолокационной / электронно-оптической бортовой системы - четвертый, пятый и шестой выходы блока 1 соответственно;
-  - первые производные от составляющих ωYD(τ),ωZD(τ) абсолютной угловой скорости - седьмой и восьмой выходы блока 1.
- первые производные от составляющих ωYD(τ),ωZD(τ) абсолютной угловой скорости - седьмой и восьмой выходы блока 1.
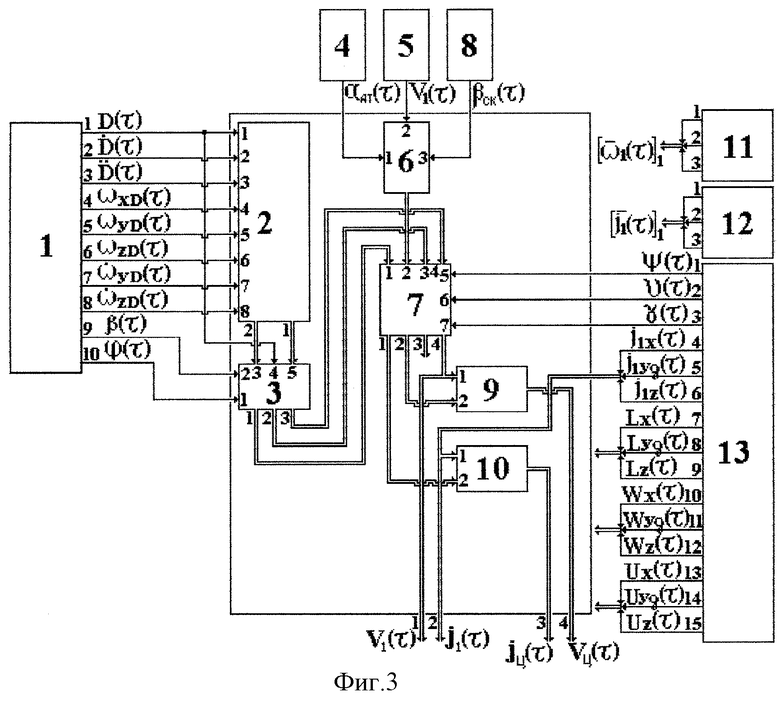
На фиг. 3 приведена структурная схема реализации существующего способа, где показаны: 1 - бортовые радиолокационная или/и электронно-оптическая системы, 2 - вычислитель бортовой радиолокационной или/и электронно-оптической системы, 3 - блок первого матричного преобразователя, 4 - аэрометрический датчик угла атаки летательного аппарата, 5 - датчик истинной воздушной скорости летательного аппарата, 6 - блок второго матричного преобразователя, 7 - блок третьего матричного преобразователя, 8 - аэрометрический датчик угла скольжения летательного аппарата, 9 и 10 - соответственно первый и второй алгебраические сумматоры, 11 - блок датчиков абсолютных угловых скоростей летательного аппарата, 12 - блок датчиков линейных ускорений летательного аппарата, 13 - гироинерциальная навигационная система.
В вычислителе бортовой радиолокационной или/и электронно-оптической системы 2 на основании перечисленных выше данных вычисляют по составляющим системы координат O(τ)XD(τ)YD(τ)ZD(τ) первую и вторую производные вектора относительной дальности D(τ)
которые по сути являются векторами относительных скорости [VЦr(τ)]D = [dD(τ)/dt]D и ускорения [jЦr(τ)]D = [d2D(τ)/dt2]D наблюдаемого объекта относительно летательного аппарата и поданы соответственно на его первый и второй выходы. Первый-восьмой входы блока 2 подключены соответственно к первому-восьмому выходам блока 1.
В блоке первого матричного преобразователя 3 получают синусы, косинусы углов пеленга β(τ),ϕ(τ), направляющие косинусы μij(τ) матрицы перехода Ml←D(τ) от системы координат O(τ)XD(τ)YD(τ)ZD(τ) к системе  , связанной с летательным аппаратом
, связанной с летательным аппаратом
и формируют соответственно на втором, третьем и первом выходах значения векторов относительной дальности [D(τ)]1, скорости [VЦr(τ)]1 и ускорения [jЦr(τ)]1 наблюдаемого объекта по составляющим именно в этой системе координат
[D(τ)]1 = Ml←D(τ)•[D(τ)0 0]D;
[VЦr(τ)]1 = Ml←D(τ)•[VЦr(τ)]D;
[jЦr(τ)]1 = Ml←D(τ)•[jЦr(τ)]D,
для чего входы блока 3 соединены соответственно первый, второй и четвертый с десятым, девятым и первым выходами блока 1, пятый и третий - с первым и вторым выходами блока 2.
Измеряют текущие значения параметров полета ЛA, а именно:
- воздушную скорость V1(τ) с помощью, например, прибора 5 типа ДВС;
- углы атаки и скольжения
αAT(τ),βCK(τ), (1)
аэрометрическими датчиками 4 и 8 флюгерного типа ДУА, ДУС соответственно,
- линейные ускорения ЛА [j1(τ)]1 = [j1x1(τ)j1y1(τ)j1z1(τ)]T, где Т - символ транспонирования векторов, матриц, с помощью блока датчиков линейных ускорений 12 типа БДЛУ - выходы первый-третий соответственно, установленного осями чувствительности вдоль строительных осей ОХ1, OY1, ОZ1, образующих упомянутую выше правую прямоугольную систему координат O(τ)X1(τ)Y1(τ)Z1(τ), связанную с летательным аппаратом,
- абсолютные угловые скорости вращения ЛА вокруг центра масс [ω1(τ)]1 = [ω1x1(τ) ω1y1(τ) ω1z1(τ)]T с помощью блока датчиков угловых скоростей 11 типа БДУС - выходы первый, второй, третий соответственно, также установленного осями чувствительности вдоль строительных осей ЛА. Во втором блоке матричного преобразователя 6 получают синусы, косинусы углов αAT(τ),βCK(τ) и направляющие косинусы матрицы перехода M1←V1(τ) от системы координат O(τ)XV1(τ)Y(τ)Z(τ), связанной с вектором воздушной скорости, к системе O(τ)X1(τ)Y1(τ)Z1(τ)
и формируют на выходе блока 6 значение вектора воздушной скорости летательного аппарата [V1(τ)]1 по составляющим именно в связанной с ЛА системе координат. При этом первый, второй и третий входы блока 6 подключены соответственно к выходам датчиков 4, 5 и 8.
С помощью гироинерциальной навигационной системы 13 типа ГИНС измеряют значения углов курса ψ(τ), тангажа ν(τ) и крена γ(τ) ЛА - выходы первый, второй, третий, определяют в проекциях на оси стабилизированной системы координат O(τ)XYgZ вектора скорости ветра [U(τ)]g = [UX(τ)UYg(τ)UZ(τ)]T - выходы тринадцатый, четырнадцатый, пятнадцатый, "земной" скорости [W(τ)]g = [WX(τ)WYg(τ)WZ(τ)]T - выходы десятый, одиннадцатый, двенадцатый, линейных ускорений
[j1(τ)]g = [j1X(τ)j1Yg(τ)j1Z(τ)]T - (2)
выходы четвертый, пятый, шестой и линейных координат ЛА [L1(τ)]g = [L1X(τ)L1Yg(τ)L1Z(τ)]T - выходы седьмой, восьмой, девятый.
В блоке третьего матричного преобразователя 7 получают синусы, косинусы углов ψ(τ),ν(τ),γ(τ) и направляющие косинусы  матрицы перехода Mg←1(τ) от связанной с летательным аппаратом O(τ)X1(τ)Y1(τ)Z1(τ) к стабилизированной O(τ)XYgZ системе координат
матрицы перехода Mg←1(τ) от связанной с летательным аппаратом O(τ)X1(τ)Y1(τ)Z1(τ) к стабилизированной O(τ)XYgZ системе координат
и формируют на втором, третьем, четвертом и первом выходах соответственно значения векторов [V1(τ)g,[D(τ)]g,[VЦr(τ)]g,[jЦr(τ)]g по составляющим в стабилизированной системе координат
[V1(τ)]g = Mg←1(τ)•[V1(τ)]1; (4)
[D(τ)]g = Mg←1(τ)•[D(τ)]1; (5)
[VЦr(τ)]g = Mg←1(τ)•[VЦr(τ)]1;
[jЦr(τ)]g = Mg←1(τ)•[jЦr(τ)]1,
для чего входы блока 7 связаны, соответственно, первый, третий и четвертый с первым, вторым и третьим выходами блока 3, второй с выходом блока 6, пятый, шестой и седьмой с первым, вторым и третьим выходами блока 13.
Вектор воздушной скорости наблюдаемого объекта [VЦ(τ)]g получают на выходе сумматора 9, где реализуют зависимость
[VЦ(τ)]g = [V1(τ)]g+[VЦr(τ)]g, (6)
для чего его первый и второй входы подключены соответственно к четвертому и второму выходам блока 7.
Вектор линейного ускорения наблюдаемого объекта [jЦ(τ)]g получают на выходе сумматора 10, где реализуют зависимость
[jЦ(τ)]g = [j1(τ)]g+[jЦr(τ)]g (7)
для чего его первый "векторный" вход соединен с четвертым-шестым выходами блока 13, а второй вход - с первым выходом блока 7.
Изложенный существующий способ "непрерывных" измерений и формирования параметров движения летательного аппарата и наблюдаемого с его борта объекта в стабилизированной системе координат имеет ряд существенных недостатков. Во-первых, он содержит множество громоздких цифровых операций вычисления тригонометрических функций, направляющих косинусов, матричных преобразований, что затрудняет его реализацию в реальном масштабе времени даже в современных бортовых быстродействующих цифровых управляющих вычислительных системах. Во-вторых, измеряемые данные αAT(τ), βCK(τ), ψ(τ), ν(τ), γ(τ), β(τ), ϕ(τ), ... содержат большие флуктуационные ошибки, которые, многократно входя в матричные преобразования, в основном и определяют низкую точность вычисляемых параметров движения.
По предлагаемому изобретению:
I. Изменяют технологию получения направляющих косинусов матриц перехода M1←g(τ),Mg←D(τ) и вычисляют их не через тригонометрические функции текущих значений углов, а методом интегрирования дифференциальных кинематических уравнений Пуассона:
и
где
- текущие значения производных направляющих косинусов,
по данным 11 блока скоростных гироскопов БДУС ωX1(τ),ωY1(τ),ωZ1(τ) и с выходов четыре-шесть блока 1 ωXD(τ),ωYD(τ),ωZD(τ) соответственно, при начальных значениях интегрирования ε11(0),ε12(0),...,ε32(0),ε33(0) и η11(0),η12(0),...,η32(0),η33(0),, однократно и синхронно вычисляемых соответственно по (3) и по алгоритму Mg←D(0) = Mg←1(0)•M1←D(0). При этом не только повышается более чем в два-четыре раза быстродействие вычислений матриц, но и происходит "сглаживание" флуктуационных помех операцией интегрирования, что способствует повышению точности.
II. Составляющие вектора истинной воздушной скорости V1g(t) летательного аппарата на интервале наблюдения 0< ≤t вычисляют сразу по составляющим стабилизированной системы координат, поскольку применяют операцию интегрирования, но теперь дифференциальных уравнений инерциальной навигации [3]
≤t вычисляют сразу по составляющим стабилизированной системы координат, поскольку применяют операцию интегрирования, но теперь дифференциальных уравнений инерциальной навигации [3]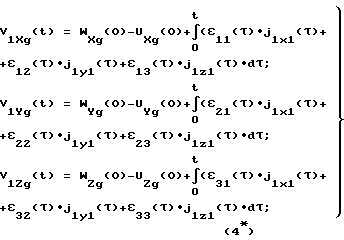
по данным от блока 12 датчиков линейных ускорений БДЛУ и значений текущих решений уравнений Пуассона при начальных условиях, вычисляемых как разности соответствующих проекций "земной" скорости Wg(0) летательного аппарата и скорости ветра Ug(0), получаемых от гироинерциальной системы. Вычисленные по (4*) более точные значения V1g(t) позволяют в свою очередь с повышенной точностью определять аналитическим методом углы атаки αAT(t) и скольжения βCK(t) ЛА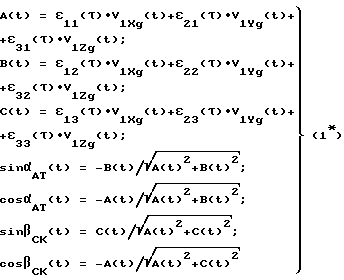
а также в (6) вектор скорости [VЦ(τ)]g наблюдаемого объекта.
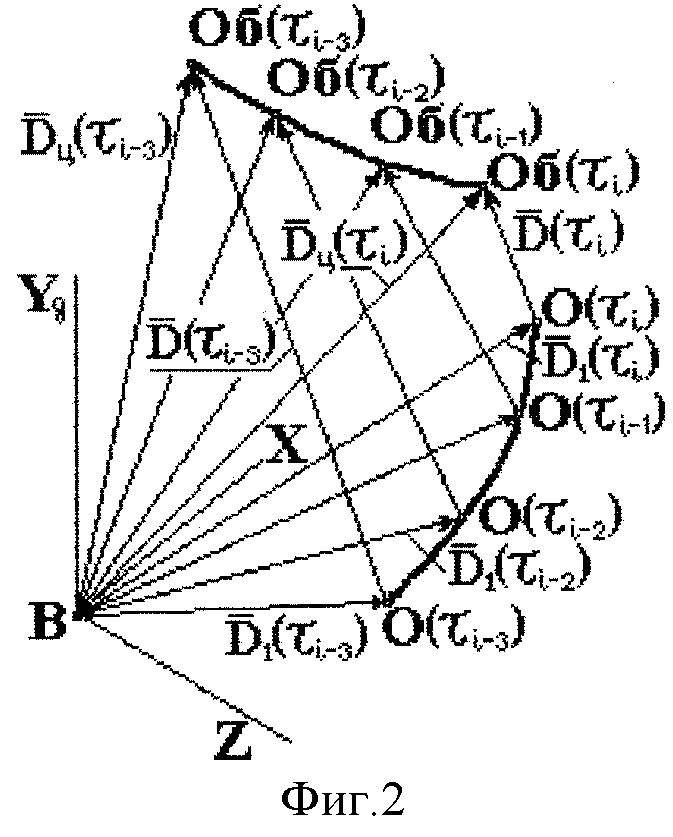
III. Дополнительно на интервале наблюдения 0<τ≤t суммируют высокоточные значения векторов линейных координат летательного аппарата [L1(τ)]g и относительной дальности [D(τ)]g, вычисленной по (5) с уточненным значением матрицы M1←g(τ), и получают высокоточные значения радиус-вектора сопровождаемого объекта [DЦ(τ)]g сразу в стабилизированной неподвижной относительно воздуха (фиг. 1) системе координат B(τ)XYgZ
[DЦ(τ)]g = [L1(τ)]g+[D(τ)]g, (8)
и на основе его дискретных отсчетов на интервале наблюдения формируют дополнительные значения параметров движения наблюдаемого объекта по дополнительно внедренному, но известному, алгоритму способа "дискретных" измерений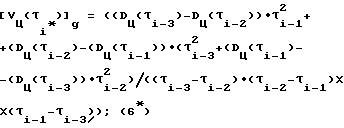
где [DЦ(τi)]g - дискретизируемые по времени τi значения вектора (8); - дискретные внутриинтервальные
- дискретные внутриинтервальные  значения векторов скорости и ускорения наблюдаемого объекта.
значения векторов скорости и ускорения наблюдаемого объекта.
Таким образом сочетают способы "непрерывных" и "дискретных" измерений (фиг. 1, 2) и реализуют предлагаемый "комбированный" способ.
IV. Дополнительно на интервале наблюдения 0<τ≤t дискретизируют по времени τi значения (6) вектора [VЦ(τ)]g, полученные с использованием уточненных по п.1 матрицы Mg←D(τ) и по п.II значения вектора [V1g(t)]g, и формируют еще одно значение вектора ускорения наблюдаемого объекта по известному алгоритму "дискретного" способа
V. Дополнительно вводят для превращения избыточной информации в повышенную точность формирования оцениваемых параметров операции совместной обработки (фильтрации) двух источников информации z1, z2 об одном и том же параметре u1, например, известным образом с помощью простейшего алгоритма [4]
z1 = u1+Δu;z2 = u1+ξ2;
где Δu случайная медленноизменяющаяся ошибка определения параметров движения, присущая алгоритмам (1*), (4*), (6*), (7*), (7**);
ξ2 - флуктуационная случайная центрированная ошибка определения тех же соответствующих параметров движения, присущая алгоритмам (1),(4),(6), (7);
T - постоянная времени алгоритма оценивания;
р - оператор дифференцирования; - оценка этого параметра.
- оценка этого параметра.
Таким образом, предлагаемым комбинированным способом устраняются недостатки существующего способа, достигается технический результат - повышенное быстродействие (реализуемость) и точность формирования параметров движения летательного аппарата и наблюдаемого с его борта объекта в стабилизированной системе координат.
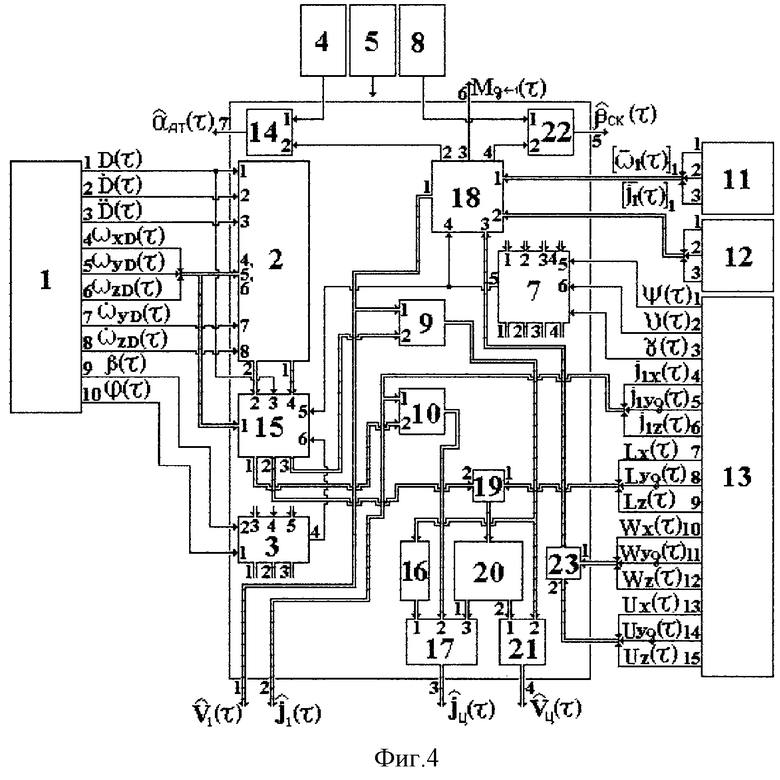
На фиг. 4 приведена структурная схема предлагаемой комплексной системы реализации комбинированного способа формирования параметров движения летательного аппарата и наблюдаемого с его борта объекта в стабилизированной системе координат, где по отношению к прототипу сохранена нумерация и суть имевших место элементов структуры и дополнительно введены: 14, 17, 21, 22 - блоки фильтров идентичных параметров, 15 - интеграторный матричный преобразователь, 16 - второй вычислитель дискретных значений вектора ускорения наблюдаемого объекта, 18 - комплексный интеграторный матричный преобразователь, 19, 23 - дополнительные третий и четвертый алгебраические сумматоры, 20 - первый вычислитель дискретных значений векторов скорости и ускорения наблюдаемого объекта.
В отличие от прототипа бортовая радиолокационная или/и электронно-оптическая система 1 первым - данные об относительной дальности D(τ), четвертым-шестым данные о векторе абсолютной угловой скорости вращения антенны/головки [ωD(τ)]D = [ωXD(τ)ωYD(τ)ωZD(τ)]T выходами подключена дополнительно соответственно к третьему скалярному и первому "векторному" входу интеграторного матричного преобразователя 15, со вторым и четвертым входами которого соединены соответственно второй и первый выходы вычислителя бортовой радиолокационной или/и электронно-оптической системы 2 - данные соответственно о векторах относительною ускорения [jЦr(τ)]D и скорости [VЦr(τ)]D наблюдаемого объекта, с пятым входом - пятый выход блока третьего матричного преобразователя 7 - данные о направляющих косинусах матрицы перехода Mg←1(0) в начальный момент времени интегрирования, с шестым входом - четвертый выход блока первого матричного преобразователя 3 - данные о направляющих косинусах матрицы перехода M1←D(0) в начальный момент времени интегрирования. На первом, втором и третьем выходах интеграторного матричного преобразователя 15 формируются в процессе интегрирования соответственно вектора относительных ускорения [jЦr(τ)]g, дальности [D(τ)]g и скорости [VЦr(τ)]g наблюдаемого объекта сразу в стабилизированной системе координат и подаются на вторые входы соответственно второго 10, третьего 19 и первого 9 алгебраического сумматора.
Комплексный интеграторный матричный преобразователь 18 входами связан: первым "векторным" с первым-третьим выходами блока датчиков абсолютных угловых скоростей [ω1(τ)]1 = [ω1x1(τ)ω1y1(τ)ω1z1(τ)]T летательного аппарата 11, вторым "векторным" с первым-третьим выходами блока 12 датчиков линейных ускорений летательного аппарата [j1(τ)]1 = [j1x1(τ)j1y1(τ)j1z1(τ)]T; третьим "векторным" с выходом четвертого алгебраического сумматора 23 для ввода начальных значений интегрирования по истинной воздушной скорости [V1(0)]g= [(WXg(0)-UXg(0)) (WYg(0)-UYg(0)) (WZg(0)-UZg(0))] T; четвертым с пятым выходом блока третьего матричного преобразователя 7 для ввода начальных значений интегрирования по направляющим косинусам матрицы перехода  ; выходами соединен: первым с первым входом первого сумматора и одновременно с первым выходным информационным каналом для передачи на интервале наблюдения значений вектора скорости летательного аппарата по составляющим в стабилизированной системе координат [V1(t)]g, вторым и четвертым со вторыми входами первого 14 и четвертого 22 блоков фильтров идентичных параметров углов атаки αAT(t) и скольжения βCK(t) соответственно; третьим с шестым выходным информационным каналом для передачи на интервале наблюдения значений матрицы перехода Mg←1(τ).
; выходами соединен: первым с первым входом первого сумматора и одновременно с первым выходным информационным каналом для передачи на интервале наблюдения значений вектора скорости летательного аппарата по составляющим в стабилизированной системе координат [V1(t)]g, вторым и четвертым со вторыми входами первого 14 и четвертого 22 блоков фильтров идентичных параметров углов атаки αAT(t) и скольжения βCK(t) соответственно; третьим с шестым выходным информационным каналом для передачи на интервале наблюдения значений матрицы перехода Mg←1(τ).
Первый алгебраический сумматор 9 связан выходом одновременно со вторым входом третьего блока фильтров идентичных параметров 21 и входом второго вычислителя дискретных значений вектора ускорения наблюдаемого объекта 16 и передает по этим связям информацию о непрерывном значении вектора скорости наблюдаемого объекта [VЦ(τ)]g = [V1(τ)]g+[VЦr(τ)]g.
Второй алгебраический сумматор 10 первым "векторным" входом соединен с четвертым, пятым и шестым выходами гироинерциальной навигационной системы 13 для приема информации о векторе линейных ускорений летательного аппарата [j1(τ)]g, а выходом связан с вторым входом второго блока фильтров идентичных параметров 17 и передает по этим связям информацию о непрерывном значении вектора ускорения наблюдаемого объекта [jЦ(τ)]g = [j1(τ)]g+[jЦr(τ)]g.
Третий алгебраический сумматор 19 первым "векторным" входом подключен к седьмому-девятому выходам гироинерциальной навигационной системы 13 для приема информации о векторе линейных координат летательного аппарата [L1(τ)]g = [L1X(τ)L1Yg(τ)L1Z(τ)]T, а выходом - к входу первого вычислителя дискретных значений векторов скорости и ускорения наблюдаемого объекта 20 для передачи данных о радиус-векторе сопровождаемого наблюдаемого объекта [DЦ(τ)]g = [L1(τ)]g+[D(τ)]g.
Четвертый алгебраический сумматор 23 первым и вторым "векторными" входами связан с гироинерциальной навигационной системой 13 для приема информации о векторах, соответственно, "земной" скорости летательного аппарата [W(τ)]g = [WX(τ)WYg(τ)WZ(τ)]T - выходы десятый-двенадцатый, и скорости ветра [U(τ)]g = [UX(τ)UYg(τ)UZ(τ)]T - выходы тринадцатый-пятнадцатый.
Первый вычислитель дискретных значений векторов скорости и ускорения наблюдаемого объекта 20 первым выходом подключен к третьему входу второго блока фильтров идентичных параметров 17 и передает по этой связи информацию о дискретных значениях вектора ускорения наблюдаемого объекта  , вторым выходом к первому входу третьего блока фильтров идентичных параметров 21 и передает по этой связи информацию о дискретных значениях вектора скорости наблюдаемого объекта
, вторым выходом к первому входу третьего блока фильтров идентичных параметров 21 и передает по этой связи информацию о дискретных значениях вектора скорости наблюдаемого объекта  .
.
Второй блок фильтров идентичных параметров 17 первым входом соединен с выходом второго вычислителя дискретных значений вектора ускорения наблюдаемого объекта 16, а выходом - с третьим выходным информационным каналом для передачи на интервале наблюдения значений оценки вектора ускорения наблюдаемого объекта по составляющим в стабилизированной системе координат  .
.
Третий блок фильтров идентичных параметров 21 выходом подключен к четвертому выходному информационному каналу для передачи на интервале наблюдения значений оценки вектора скорости наблюдаемого объекта по составляющим в стабилизированной системе координат  .
.
Первый блок фильтров идентичных параметров 14 первым входом связан с выходом существующего датчика угла атаки 4, а выходом подсоединен к седьмому выходному информационному каналу для передачи на интервале наблюдения значений оценки угла атаки  .
.
Четвертый блок фильтров идентичных параметров 22 первым входом соединен с выходом существующего датчика угла скольжения 8, а выходом подключен к пятому выходному информационному каналу для передачи на интервале наблюдения значений оценки угла скольжения  .
.
На второй выходной информационный канал, связанный непосредственно с четвертым-шестым выходами гироинерциальной навигационной системы, поступает, как и у прототипа, информация о векторе ускорения летательного аппарата по составляющим в стабилизированной системе координат [j1(τ)]g.
Перечень графических материалов
1. Первый лист:
Фиг. 1. Векторная схема непрерывного определения текущих координат летательного аппарата и наблюдаемого объекта.
Фиг. 2. Векторная схема дискретного определения текущих координат летательного аппарата и наблюдаемого объекта.
Фиг. 3. Схема структурная существующего устройства непрерывного формирования параметров движения летательного аппарата и наблюдаемого с его борта объекта в стабилизированной системе координат.
Фиг. 4. Схема структурная предлагаемой комплексной системы формирования параметров движения летательного аппарата и наблюдаемого с его борта объекта в стабилизированной системе координат.
Источники информации
1. Мубаракшин Р.В. и др. Прицельные системы стрельбы. Часть 1. М., ВВИА им. Н.Е.Жуковского, 1973, стр.39-51 по способу.
2. Балуев В. М. и др. Воздушная стрельба и прицелы. - М.: ВВИА им Н.Е. Жуковского, 1958, с.163, 164 по устройству.
3. Помыкаев И. И. и др. Навигационные приборы и системы. - М.: Машиностроение, 1983, с.286-289 по способу доп.
4. Красовский А.А. Основы теории управления и системотехники. Материалы лекций. - М.: ВВИА им. Н.Е.Жуковского, 1986, с.221-224 по способу доп.
Изобретение относится к авиационному приборостроению, в частности к информационным средствам прицеливания и группового пилотирования летательных аппаратов (ЛА). По предлагаемому способу направляющие косинусы используемых матриц перехода вычисляют методом интегрирования дифференциальных уравнений Пуассона и инерциальной навигации, на интервале наблюдения формируют значения параметров движения наблюдаемого объекта комбинированным способом - непрерывным и дискретным. Вводят операции совместной обработки нескольких источников информации об одном и том же параметре для дополнительного повышения точности его оценивания. Комплексная система, реализующая комбинированный способ, содержит бортовую радиолокационную или/и электронно-оптическую систему, вычислитель бортовой радиолокационной или/и электронно-оптической системы, три блока матричных преобразователей, аэрометрические датчики угла атаки и скольжения ЛА, датчик истинной воздушной скорости ЛА, четыре алгебраических сумматора, блоки датчиков абсолютных скоростей и линейных ускорений ЛА, гироинерциальную навигационную систему, четыре блока фильтров идентичных параметров, интеграторный матричный преобразователь, первый вычислитель дискретных значений векторов скорости и ускорения наблюдаемого объекта, второй вычислитель дискретных значений вектора ускорения наблюдаемого объекта, комплексный интеграторный матричный преобразователь. Перечисленные блоки соединены между собой соответствующим образом. Технический результат состоит в повышении быстродействия и точности формирования параметров движения летательного аппарата и наблюдаемого с его борта объекта в стабилизированной системе координат. 2 с.п. ф-лы, 4 ил.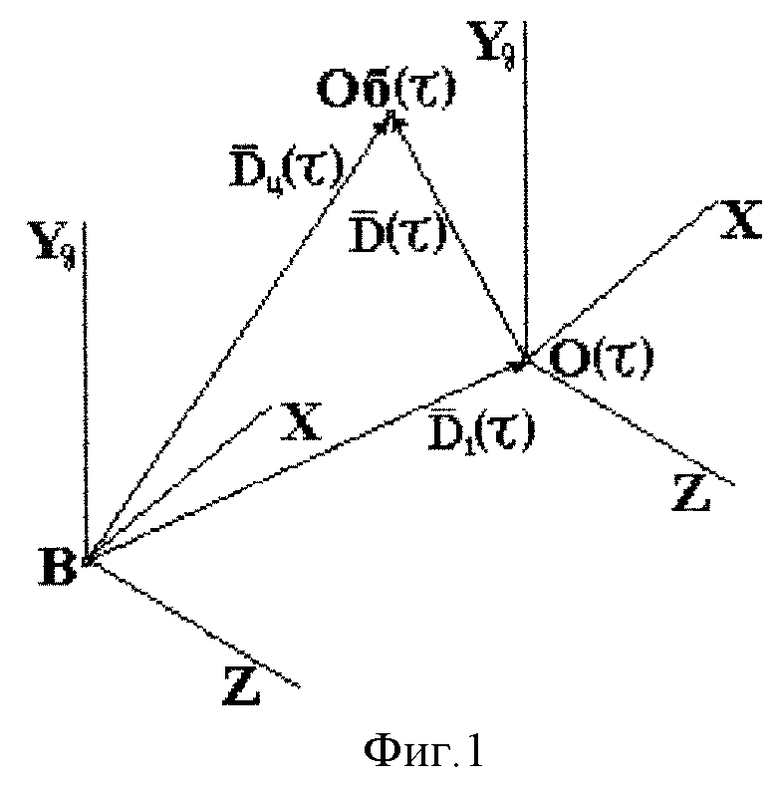
| МУБАРАКШИН Р.В | |||
| и др | |||
| Прицельные системы стрельбы, ч.I | |||
| - М.: ВВИА им | |||
| Жуковского, 1973, с.39-51 | |||
| БАЛУЕВ В.М | |||
| и др | |||
| Воздушная стрельба и прицелы | |||
| - М.: ВВИА им | |||
| Жуковского, 1958, с.163, 164 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПУАССОНА ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2096818C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| Способ упрочняющей обработки деталей | 1988 |
|
SU1595927A1 |
| US 36300079 A, 28.12.1971. | |||

