Изобретение относится к области авиационного приборостроения и предназначено для использования в составе бортовых комплексов навигации и управления летательных аппаратов (ЛА).
Из известных систем наиболее близким аналогом является система, содержащая инерциальный датчик скорости (ИДС), доплеровский датчик скорости (ДДС), спутниковый датчик скорости (СДС), инерциально-спутниковый фильтр (ИСФ), инерциально-доплеровский фильтр (ИДФ), описание которой приведено в книге [1] Бабича О. А. "Обработка информации в навигационных комплексах", Москва, Машиностроение, 1991 г., стр. 419-432, стр. 476-485.
В ИСФ осуществляется выделение погрешности ИДС по скорости, при этом откорректированные составляющие путевой скорости стремятся к действительным значениям, однако при отказах (отключениях) СДС и изменениях составляющих скорости движения ЛА имеет место погрешность, определяемая ошибкой ИДС по географическому курсу δo.
В ИДФ откорректированные составляющие путевой скорости формируются с погрешностью, определяемой суммарной ошибкой ИДС по географическому курсу (δo) и ошибкой неточности установки ДДС относительно продольной строительной оси ЛА (Δ).
Задачей изобретения является повышение точности работы системы.
Достигается это тем, что в комплексную систему, содержащую последовательно соединенные спутниковый датчик скорости и инерциально-спутниковой фильтр, последовательно соединенные инерциальный датчик скорости, доплеровский датчик скорости и инерциально-доплеровский фильтр, второй вход которого объединен со вторым входом инерциально-спутникового фильтра и вторым выходом инерциального датчика скорости, дополнительно введены последовательно соединенные моделирующий фильтр, блок выделения погрешности курса и блок запоминания, выход которого подключен ко второму входу доплеровского датчика скорости, причем выход инерциально-спутникового фильтра подключен к входу моделирующего фильтра и ко второму входу блока выделения погрешности курса, на третий вход которого подключен выход инерциально-доплеровского фильтра, а второй выход спутникового датчика скорости подключен ко второму входу блока запоминания.
На чертеже представлена блок-схема предлагаемой системы, содержащей:
1 - спутниковый датчик скорости (СДС),
2 - инерциальный датчик скорости (ИДС),
3 - доплеровский датчик скорости (ДДС),
4 - инерциально-спутниковый фильтр (ИСФ),
5 - инерциально-доплеровский фильтр (ИДФ),
6 - моделирующий фильтр (МФ),
7 - блок выделения погрешности курса (БВПК),
8 - блок запоминания (БЗ).
Связи между блоками осуществляются, например, по последовательному коду.
СДС 1 измеряет составляющие путевой скорости в географических осях  ;
;  (здесь V1, V2 - действительные значения,
(здесь V1, V2 - действительные значения,  высокочастотные центрированные погрешности, [1] стр. 477) с первого выхода СДС 1 поступают на первый вход ИСФ 4, со второго выхода СДС 1 сигнал Uo (Uo < 0 - исправность, Uo ≥0 - отказ СДС 1) поступает на второй вход БЗ 8.
высокочастотные центрированные погрешности, [1] стр. 477) с первого выхода СДС 1 поступают на первый вход ИСФ 4, со второго выхода СДС 1 сигнал Uo (Uo < 0 - исправность, Uo ≥0 - отказ СДС 1) поступает на второй вход БЗ 8.
ИДС 2 измеряет и выдает:
- сигнал угла гироскопического курса (угла между продольной осью ИДС 2 и продольной осью ЛА) ψи, который с первого выхода ИДС 2 поступает на первый вход ДДС 3,
- составляющие путевой скорости в осях ИДС 2
V1и= V1cosδo+V2sinδo+δ1;
V2и= V2cosδo-V1sinδo+δ2,
(здесь δo - погрешность по географическому курсу δ1= Σai•ti, δ2= Σbi•ti, ai= const, bi= const), которые со второго выхода ИДС 2 поступают на второй вход ИСФ 4 и на второй вход ИДФ 5.
ДЦС 3 измеряет составляющие путевой скорости в собственных осях:

(здесь Δ - погрешность установки ДДС 3 относительно продольной оси ЛА), которые через ψи приводятся к осям ИДС 2:

(здесь  высокочастотные центрированные погрешности), которые с выхода ДДС 3 поступают на первый вход ИДФ 5.
высокочастотные центрированные погрешности), которые с выхода ДДС 3 поступают на первый вход ИДФ 5.
В ИСФ 4 формируются откорректированные составляющие путевой скорости:

где P - оператор дифференцирования,
r=1+T1P+...+Tn-1n-1•Pn-1,
R=r+TnnPn=1+T1P+...+TnnPn, T1,...,Tn - постоянные времени,
и, если за время совместной коррекции
δ1= Σaiti, δ2= Σbiti, V1= ΣCiti, V2= Σditi,
n≥i+1, и T1, ...,Tn выбраны таким образом, что обеспечивается качество переходного процесса и подавление  до величин, близких к нулю, то
до величин, близких к нулю, то  эти сигналы с выхода ИСФ 4 поступают на вход МФ 6 и на второй вход БВПК 7.
эти сигналы с выхода ИСФ 4 поступают на вход МФ 6 и на второй вход БВПК 7.
В ИДФ 5 формируются откорректированные составляющие путевой скорости при 

сигналы  с выхода ИДФ 5 поступают на третий вход БВПК 7.
с выхода ИДФ 5 поступают на третий вход БВПК 7.
МФ 6 реализует передаточную функцию
пример реализации приведен в книге [2] Тетедьбаума И.М,, Шнейдера Д.Р. "400 схем для АВМ", Москва, Энергия, 1978 г., стр. 10, стр. 25.
Сформированные в МФ 6 сигналы
поступают на первый вход БВПК 7.
БВПК 7 реализуется на стандартном арифметическом устройстве (см. книгу [3] Преснухина Л. Н. , Нестерова П. В. "Цифровые вычислительные машины", Москва, Высшая школа, 1981 г., стр. 16), в котором по поступившим сигналам формируется сигнал (при малых углах δ < 5o)
который с выхода БВПК 7 поступает на первый вход БЗ 8.
БЗ 8 по техническому исполнению является стандартным блоком запоминания (см. [2], стр. 124), в котором при отказе (отключении) СДС 1 (сигнал Uo≥0 на втором входе БЗ 8) запоминается сигнал  который с выхода БЗ 8 поступает на второй вход ДДС 3, в котором и формируются с учетом
который с выхода БЗ 8 поступает на второй вход ДДС 3, в котором и формируются с учетом 


Сигналы V19, V2g поступают на первый вход ИДФ 5, в котором соответственно формируются сигналы откорректированных составляющих путевой скорости:
Сигналы  выдаются потребителям - в бортовые системы навигации и управления.
выдаются потребителям - в бортовые системы навигации и управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |
| СИСТЕМА НАВИГАЦИИ | 2000 |
|
RU2168703C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2168154C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА | 2000 |
|
RU2178146C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ | 1998 |
|
RU2146805C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2178145C1 |
Изобретение относится к авиационному приборостроению и может быть использовано в составе бортового оборудования летательных аппаратов, обеспечивающего их навигацию, управление и наведение. Предлагаемая система содержит спутниковый датчик скорости, инерциально-спутниковый и инерциально-доплеровский фильтры. Дополнительно введены моделирующий фильтр, блок выделения погрешности курса и блок запоминания. Эти элементы системы обеспечивают повышение точности формирования составляющих путевой скорости в инерциально-доплеровском фильтре. Вследствие этого изобретение позволяет повысить точность управления, наведения и в результате - эффективность применения летательных аппаратов, оснащенных предлагаемой системой. 1 ил.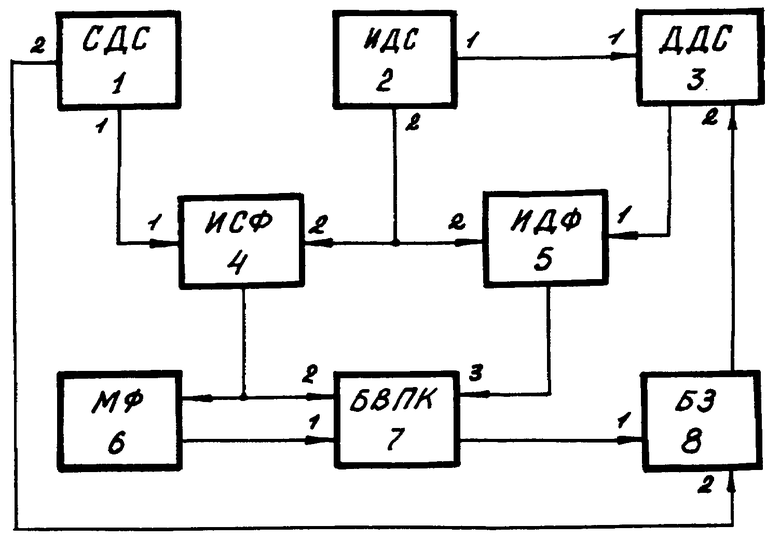
Комплексная система формирования составляющих путевой скорости, содержащая последовательно соединенные спутниковый датчик скорости и инерциально-спутниковый фильтр, последовательно соединенные инерциальный датчик скорости, доплеровский датчик скорости и инерциально-доплеровский фильтр, второй вход которого объединен с вторым выходом инерциального датчика скорости и вторым входом инерциально-спутникового фильтра, отличающаяся тем, что в нее дополнительно введены последовательно соединенные моделирующий фильтр, блок выделения погрешности курса и блок запоминания, выход которого подключен к второму входу доплеровского датчика скорости, причем выход инерциально-спутникового фильтра подключен к входу моделирующего фильтра и к второму входу блока выделения погрешности курса, на третий вход которого подключен выход инерциально-доплеровского фильтра, а второй выход спутникового датчика скорости подключен к второму входу блока запоминания.
| Бабич О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.419 - 432, 476 - 485 | |||
| RU 2071034 С1, 27.12.1996 | |||
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1988 |
|
RU2083954C1 |
| US 5841370 А, 24.11.1998. | |||

