Изобретение относится к гироскопической технике и может найти применение в составе путеизмерителей для определения взаимного положения рельсовых нитей в вертикальной плоскости.
Известен одноосный горизонтальный гиростабилизатор с вертикальной осью ротора в кардановом подвесе, цепью межрамочной коррекции, включающей последовательно соединённые датчик угла прецессии на внутренней оси подвеса, усилитель и двигатель на наружной оси подвеса, и цепью приведения, включающей последовательно соединённые маятниковый датчик угла на наружной оси подвеса и датчик момента на внутренней оси подвеса, причём в него введены последовательно соединенные датчик линейной скорости объекта в горизонтальной плоскости вдоль наружной оси подвеса и суммирующе-преобразующее устройство, включённое во входную цепь усилителя цепи межрамочной коррекции (Авторское свидетельство СССР №790923, кл. C01C 19/44. Одноосный силовой горизонтальный гиростабилизатор / С.С. Арутюнов, В.М. Хохлов. – Опубл. 1982 год. – Бюл. №1).
Недостатком данного устройства являются большие возмущающие моменты, действующие по оси подвеса наружной рамы в силу механической компенсации колебаний вагона относительно колесной пары, что приводит к увеличению габаритов. А также постоянный наклон ротора гиромотора относительно вертикали по внутренней оси на достаточно большие углы (до 20-30 градусов), что при колебаниях вагона вокруг вертикали при движении порождает дополнительные погрешности.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является одноосный горизонтальный гиростабилизатор в составе устройства для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости (Патент России на изобретение №2676951, кл. G01C 7/04. Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости / С.В. Кривошеев, Д.Р. Гатауллина, – опубл. 11.01.2019. – Бюл. №2), состоящий из ротора с вертикальной осью в кардановом подвесе. Данный одноосный гиростабилизатор имеет цепь межрамочной коррекции, включающую последовательно соединённые датчик угла прецессии на внутренней оси подвеса, усилитель стабилизации, на первый вход которого подключён выход датчика угла прецессии, а на второй - датчик линейной скорости объекта, состоящий из последовательно соединённых тахогенератора и масштабного усилителя, а выход усилителя стабилизации соединён с двигателем, установленным на наружной оси подвеса, и цепь приведения, включающую последовательно соединённые маятниковый датчик угла, установленный на наружной оси подвеса, усилитель коррекции и датчик момента, установленный на внутренней оси подвеса.
Недостатком данного устройства, взятого за прототип, в котором устранено влияние больших возмущающих моментов по оси наружной рамы, но остался большой угол отклонения гиромотора относительно вертикали по внутренней оси на достаточно большие углы (до 20-30 градусов), является то, что наклон гиромотора при колебаниях вагона вокруг вертикали при движении порождает дополнительные погрешности, которые снижают точность сигнала отклонения от местного горизонта.
Техническим результатом изобретения является повышение точности сигнала отклонения от местного горизонта на вираже.
Технический результат достигается тем, что в одноосном силовом горизонтальном гиростабилизаторе, установленном на подвижном объекте и содержащем гиромотор в кардановом подвесе, цепь межрамочной коррекции, включающую последовательно соединённые датчик угла прецессии на внутренней оси подвеса, усилитель стабилизации и двигатель, установленный на наружной оси подвеса, на которой также установлен системный датчик угла, цепь приведения, включающую последовательно соединённые маятниковый датчик угла, усилитель коррекции и датчик момента, установленный на внутренней оси подвеса, а также датчик линейной скорости объекта, подключённый на вход масштабного усилителя новым является то, что маятниковый датчик угла цепи приведения выполнен в виде гиромаятника, представляющего собой двухстепенной поплавковый гироскоп с нижней маятниковостью и осью подвеса параллельной наружной оси гиростабилизатора, а гиромотор гиромаятника подключён к выходу цепи управления скоростью вращения ротора гиромотора гиромаятника, состоящей из последовательно соединённых датчика линейной скорости объекта и масштабного усилителя, которая регулирует скорость вращения ротора гиромотора соответствии с формулой
где 



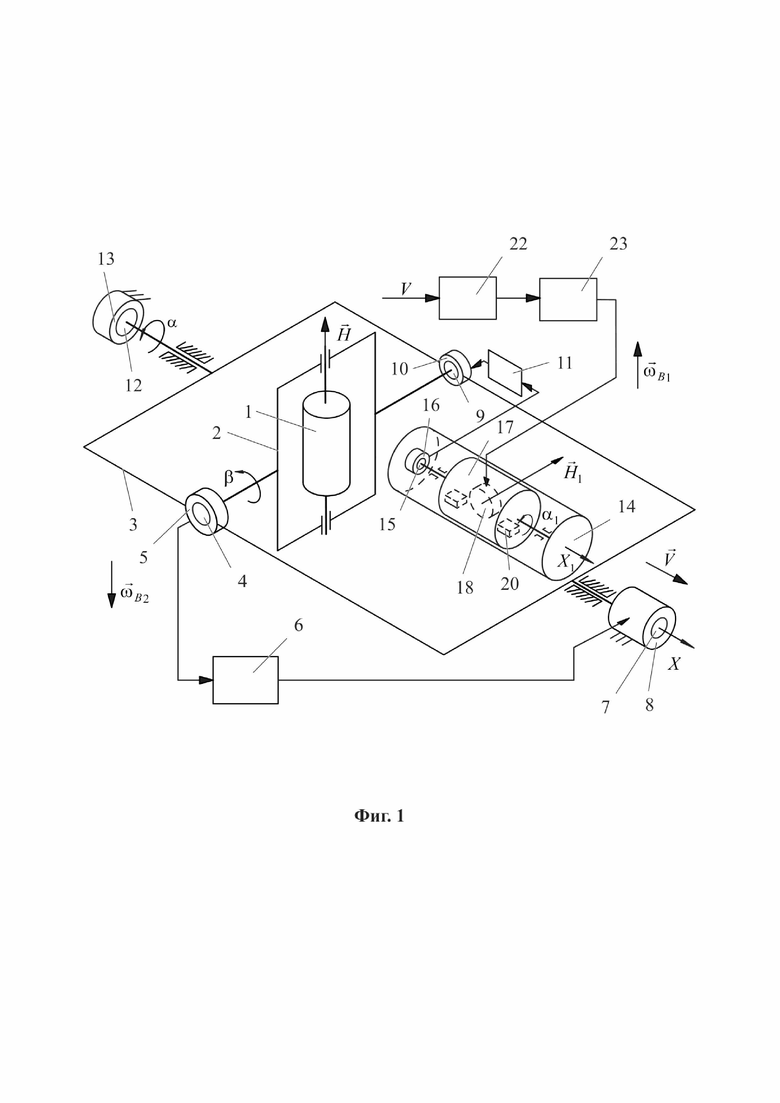
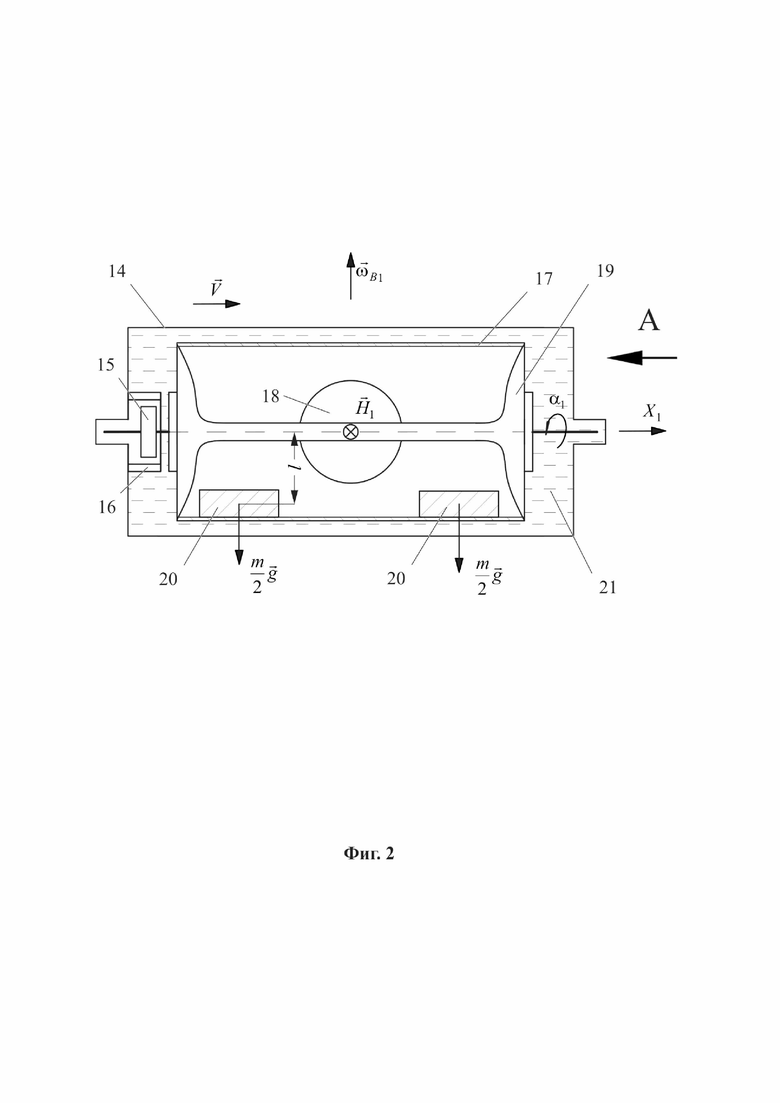
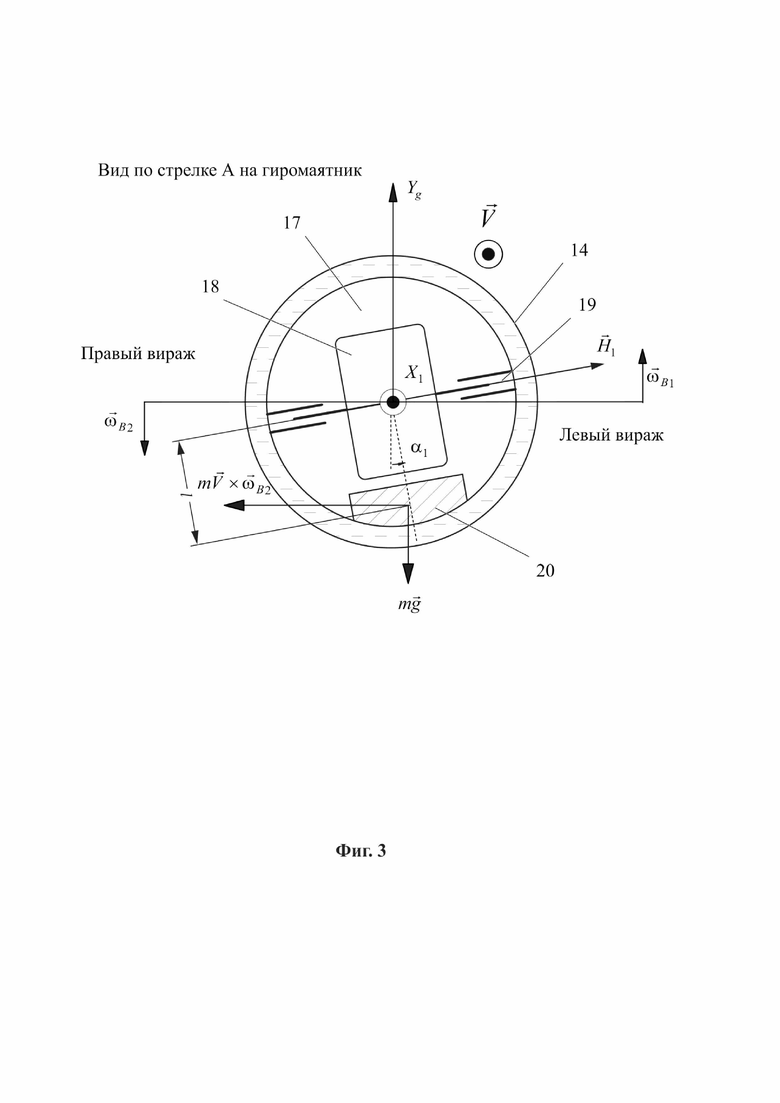
Сущность изобретения поясняется фигурами, где фиг. 1 – структурно-кинематическая схема одноосного силового горизонтального гиростабилизатора, фиг. 2 – эскиз поплавкового маятникового узла гиромаятника (продольный вид), фиг. 3 – эскиз поплавкового маятникового узла гиромаятника (поперечный вид), являющийся видом по стрелке «А» на фиг. 2. На фиг.1 – фиг. 3 приняты следующие обозначения:
1 – ротор гиромотора гиростабилизатора;
2 – внутренняя рама гиростабилизатора с осью ротора гиромотора и полуосями;
3 – наружная рама гиростабилизатора с полуосями;
4 – ротор датчика угла прецессии;
5 – статор датчика угла прецессии;
6 – усилитель стабилизации;
7 – ротор двигателя;
8 – статор двигателя;
9 – ротор датчика момента;
10 – статор датчика момента;
11 – усилитель коррекции;
12 – ротор системного датчика угла;
13 – статор системного датчика угла;
14 – корпус гиромаятника;
15 – ротор датчика угла поворота поплавкового маятникового узла гиромаятника;
16 – статор датчика угла поворота поплавкового маятникового узла гиромаятника;
17 – поплавковый маятниковый узел гиромаятника;
18 – ротор гиромотора гиромаятника;
19 – рамка поплавкового узла гиромаятника;
20 – грузики;
21 – жидкость;
22 – датчик линейной скорости объекта;
23 – масштабный усилитель;















В соответствии с фиг.1 – фиг.3 устройство функционально можно представить в виде трех контуров (цепей): контур межрамочной коррекции (контур силовой стабилизации), цепь приведения и контур управления угловой скоростью вращения ротора гиромотора в цепи приведения.
Ротор 1 гиромотора гиростабилизатора установлен в кардановом подвесе, состоящем из наружной рамы 3 с полуосями, ориентированными по направлению движения, и закреплённой в ней внутренней рамы 2 с полуосями. Цепь межрамочной коррекции содержит датчик угла прецессии, ротор 4 которого установлен на полуоси внутренней рамы, а статор 5 закреплён на наружной раме, подключённый на вход усилителя стабилизации 6, выход которого соединён с двигателем, ротор 7 которого установлен на полуоси наружной рамы 3 с осью подвеса Х, а статор 8 закреплён на корпусе. Цепь приведения состоит из последовательно соединённых датчика угла (ротор 15 и статор 16) маятникового датчика угла, выполненного в виде гиромаятника 14, установленного на наружной раме 3 гиростабилизатора с осью параллельной оси Х наружной рамы 3 гиростабилизатора, усилителя коррекции 11 и датчика момента, ротор 9 которого установлен на полуоси внутренней рамы 2, а статор 10 закреплён в наружной раме 3.
Маятниковый датчик угла представляет собой гиромаятник на основе двухстепенного гироскопа, состоящего из заполненного жидкостью 21 корпуса 14, жёстко прикреплённого к корпусу 14 сильфона для компенсации изменения объёма жидкости (на фиг. 1 – фиг. 3 сильфон условно не показан), поплавкового маятникового узла 17 и датчика угла поворота поплавкового маятникового узла с закреплённым на корпусе статором 16 и установленным на поплавковом маятниковом узле 17 гиромаятника ротором 15. В поплавковом маятниковом узле располагается гиромотор гиромаятника с ротором 18, установленный в рамке 19 гиромаятника. Сам поплавковый маятниковый узел выполнен со смещённым вниз центром масс относительно оси подвеса гиромаятника для создания необходимой маятниковости (на фиг. 1 – фиг.3 это условно показано наличием грузиков 20 в нижней части поплавкового маятникового узла 17). Пространство внутри поплавкового маятникового узла 17 заполнено инертным газом. Маятниковый датчик угла располагается на внешней раме 3 гиростабилизатора таким образом, чтобы его ось подвеса 
Выходной сигнал гиростабилизатора формируется системным датчиком угла, ротор 12 которого крепится на полуоси наружной рамы, а статор 13 закреплён в корпусе гиростабилизатора.
Контур межрамочной коррекции гиростабилизатора предназначен для компенсации возмущающих моментов, действующих по оси стабилизации – оси подвеса наружной рамы 3, и работает следующим образом (при этом на гиромотор гиростабилизатора подаётся питание и он набрал номинальные обороты, т.е. ротора 1 гиростабилизатора приобрел номинальный кинетический момент 


Цепь приведения, служит для установки наружной рамы 3 в горизонтальное положение, т.е. для моделирования плоскости местного горизонта, отклонение от которого формируется системным датчиком угла 12-13 и поступает в систему, для которой предназначен данный гиростабилизатор.
Цепь приведения в качестве маятникового датчика угла содержит гиромаятник 14, выходной сигнал которого формируется датчиком угла 15-16 и выход которого подключен к последовательно соединенным усилителю коррекции 11 и датчику момента 9-10. Момент датчика момента, приложенный к оси внутренней рамы 2 гиростабилизатора, приводит в соответствии с правилом прецессии наружную раму 3 в положение, параллельное плоскости горизонта. Однако на виражах (на поворотах) от действия центростремительного ускорения возникает инерционная сила (фиг.3), приложенная к грузикам 20, которая создает инерционный момент, отклоняющий рамку 19 поплавкового узла в положение ложной вертикали (горизонта). За счет работы контура приведения рамка 3 также будет отклоняться в положение ложной вертикали (горизонта).
Чтобы при вираже объекта (движении в кривых) не было виражных погрешностей, параметры гиромаятника, который выдает корректирующий сигнал отклонения от плоскости горизонта, выбираются специальным образом.
При движении по криволинейной траектории в плоскости горизонта в системе отсчёта связанной с устройством на гиромаятник действуют гироскопический момент, момент силы инерции, момент силы тяжести и возмущающий момент. Сумма моментов в проекции на ось 


где 



По основному уравнению динамики вращательного движения, запишем дифференциальное уравнение вращения для поплавкового маятникового узла

где 



С учётом выражения для суммы моментов 

Чтобы угловая скорость виража 
которое можно назвать условием инвариантности гиромаятника к угловой скорости виража.
Так как кинетический момент ротора гиромотора гиромаятника определяется по формуле 
где 

Это условие подчёркивает тот факт, что угловой скоростью вращения ротора гиромотора гиромаятника необходимо управлять в зависимости от скорости движения объекта, а реализуется это условие с помощью цепи управления скоростью вращения ротора гиромотора, состоящей из последовательно соединённых датчика линейной скорости объекта 22 и масштабного усилителя 23.
Таким образом, независимо от виража поведение гиромаятника будет описываться уравнением

которое подчёркивает, что при движении по криволинейной траектории в плоскости горизонта виражные погрешности у гиромаятника отсутствуют.
Следовательно, и цепь приведения гиростабилизатора, в которой сигнал гиромаятника используется в качестве сигнала коррекции, тоже будет работать без виражных погрешностей.
Реализация устройства
Чтобы иметь возможность регулировать угловую скорость 



Вариант 1.



Вариант 2.
можно определить массу, момент инерции ротора и его угловую скорость



Полученные значения угловой скорости вполне реализуемы как для гиромоторов постоянного тока, так и переменного с частотным управлением.
Таким образом, если в гиромаятнике скомпенсированы виражные погрешности, то погрешность формирования горизонтальной плоскости будет определяться в основном моментом дрейфа в оси подвеса гиромаятника, величина которого имеет порядок 
Применение предложенной схемы построения гиростабилизатора позволяет существенно снизить виражные погрешности (повысить точность выходного сигнала) за счёт компенсации инерционного момента гироскопическим моментом путём введения цепи управления скоростью вращения ротора гиромотора гиромаятника в функции скорости движения объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| Гиростабилизатор морского гравиметра | 1974 |
|
SU565268A1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
Изобретение относится к гироскопической технике и может найти применение в составе путеизмерителей для определения взаимного положения рельсовых нитей в вертикальной плоскости. Одноосный силовой горизонтальный гиростабилизатор содержит гиромотор с ротором, установленный в карданов подвес. Цепь межрамочной коррекции, включает в себя последовательно соединённые датчик угла прецессии на внутренней оси подвеса, усилитель стабилизации и двигатель, установленный на наружной оси подвеса. Цепь приведения состоит из последовательно соединённых маятникового датчика угла, установленного на наружной раме подвеса, усилителя коррекции и датчика момента, установленного на внутренней оси подвеса. Маятниковый датчик угла выполнен в виде гиромаятника и представляет собой двухстепенной поплавковый гироскоп с нижней маятниковостью, ось подвеса которого параллельна наружной оси гиростабилизатора. Ротор гиромотора гиромаятника подключён к цепи управления скоростью вращения, состоящей из масштабного усилителя и подключённого на его вход датчика линейной скорости объекта. Выходной сигнал гиростабилизатора формируется системным датчиком угла, установленным на наружной оси подвеса. Технический результат изобретения – повышение точности сигнала отклонения от местного горизонта на вираже за счёт компенсации инерционного момента гироскопическим моментом путём введения цепи управления скоростью вращения ротора гиромотора гиромаятника в функции скорости движения объекта. 3 ил.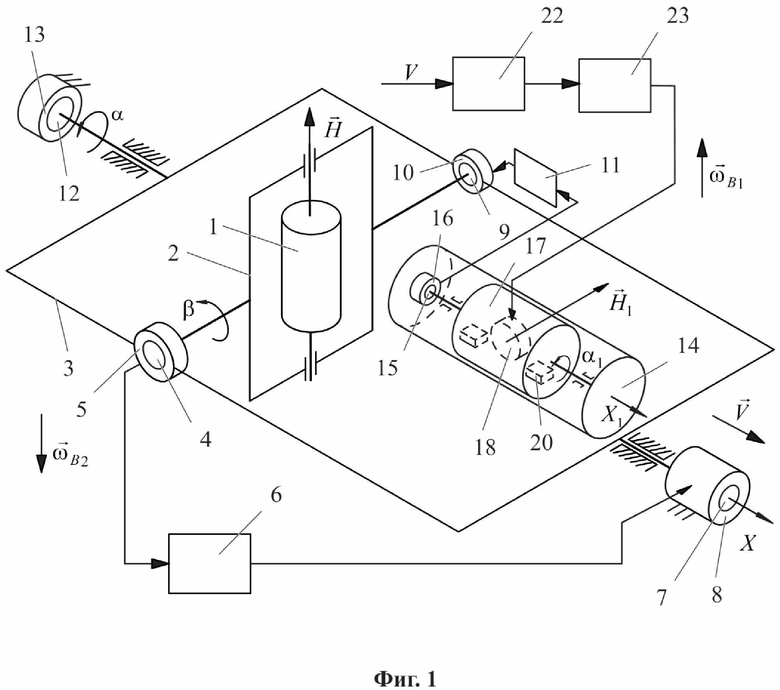
Одноосный силовой горизонтальный гиростабилизатор, установленный на подвижном объекте и содержащий гиромотор в кардановом подвесе, цепь межрамочной коррекции, включающую последовательно соединённые датчик угла прецессии на внутренней оси подвеса, усилитель стабилизации и двигатель, установленный на наружной оси подвеса, на которой также установлен системный датчик угла, цепь приведения, включающую последовательно соединённые маятниковый датчик угла, усилитель коррекции и датчик момента, установленный на внутренней оси подвеса, а также датчик линейной скорости объекта, подключённый на вход масштабного усилителя, отличающийся тем, что маятниковый датчик угла цепи приведения, установленный на наружной раме подвеса, выполнен в виде гиромаятника, представляющего собой двухстепенной поплавковый гироскоп с нижней маятниковостью и осью подвеса параллельной наружной оси гиростабилизатора, а гиромотор гиромаятника подключён к выходу цепи управления скоростью вращения ротора гиромотора гиромаятника, состоящей из последовательно соединённых датчика линейной скорости объекта и масштабного усилителя, которая регулирует скорость вращения ротора гиромотора в соответствии с формулой
где 



| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| ОПТОЭЛЕКТРОННАЯ СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ В ДВИЖЕНИИ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ЖЕЛЕЗНОДОРОЖНОЙ КОЛЕИ. ОПТОЭЛЕКТРОННЫЙ ДАТЧИК БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ И ИЗНОСА РЕЛЬСА | 1995 |
|
RU2142892C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2394120C2 |
| CN 107284473 A, 24.10.2017. | |||

