Изобретение относится к гироскопической технике, а именно к двухосным гиростабилизатОрам для стабилизации в заданном направлении оптических приборов, например телескопов астронавигационной системы летательных аппаратов.
Особенность эксплуатации астронавигационной системы летательного аппарата связана с необходимостью обеспечивать высокую точность стабилизации оптического прибора при угловых колебаниях летательного аппарата, например, пОд действием порывов ветра, при попадании в нисходящий воздушный поток и т. д.
Известны двухосные гиростабилизаторы для стабилизации приборов в заданном направлении, содержащие платформу, на которой установлены два двухстепенных гироскопа, и связанный с платформой стабилизируемый прибор. Векторы кинетических моментов гироскопов, yctaнoвлeнныx на платформе, в неотклоненнбм положении ориентированы параллельно етабилизируемому направлению. Роль платформы выполняет внутренняя рама карданова подвеса гиростабилизатора, которая может занимать произвольное положение относительно наружной рамы.
снижает точность стабилизации. Эти систематические уходы обусловлены постоянными по направлению гироскопическими моментами по осям прецессии гироскопов, порождаемыми
кинетикой возмущенного движения рам карданова подвеса гиростабилизатора при угловых движениях объекта, например летательного аппарата, с составляющей угловой скорости по направлению перпендикуляра к плоскости наружной рамы гиростабилизатора. Угловые скорости этих систематических уходов даже при весьма малых углах прецессии гироскопов могут достигать значительных величин, причем они быстро возрастают с увеличением угла положения платформы относительно наружной рамы гиростабилизатора, который в случае стабилизации оптической оси телескопа астронавигационной системы летательного аппарата изменяется в больших
пределах и практически может достигать величины порядка 60-80°.
Целью изобретения является повыщение точности двухосного гиростабилизатора, особенно при работе на летательном аппарате,
подверженном угловым колебаниям.
Для этого с осью подвеса наружной рамы гиростабилизатора соединен тахогенератор, например, постоянного тока, а на корпусе гиростабилизатора установлен гиротахометр,
параллельно оси подвеса наружной рамы. На осях прецессии гироскопов установлены дат-. чики моментов коррекции, выполненные, например, в виде двухфазных асинхронных двигателей. Выходы тахогенератора и гиротахометра соединены со входом функционального преобразователя, реализующего косекансную зависимость от угла положения платформы относительно наружной рамы, выполненного, например, в виде потенциометра. Выход элемента, реализующего косекансную зависимость, соединен с обмотками управления датчиков моментов коррекции, обмотки возбуждения которых соединены с выходами соответствующих датчиков углов прецессии гироскопов.
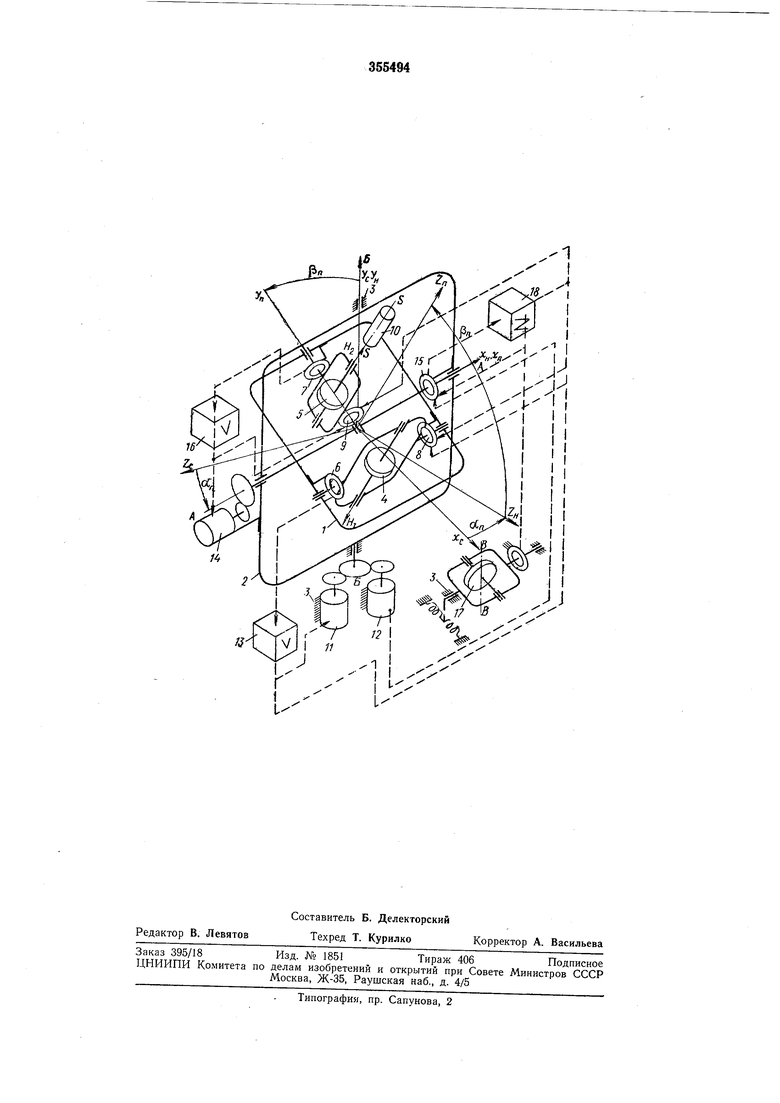
На чертеже показана схема двухосного гиростабилизатора.
На схеме правые ортогональные трехгранники связаны: Х, УП. п - с внутренней рамой - платформой 1; , Y ZH - с наружной рамой 2; Хс, YC, Zc - с летательным анпаратом, с которым связан корпус 3 гиростабилизатора. Стабилизируемая ось Zn совпадает с перпендикуляром к плоскости платформы /, а оси трехгранника Хц, УН, ZH ориентированы: Xjj по оси А-А подвеса платформы 1; YH - по оси Б-Б подвеса наружной рамы 2; Zn-по перпендикуляру к плоскости наружной рамы 2.
Угол ап определяет положение наружной рамы 2 относительно летательного аппарата, с которым связан корпус 5 гиростабилизатора, а угол РП - платформы 1 относительно наружной рамы 2. Два угла ссп и Рп онределяют любое заданное направление оси Zn и параллельной ей оптической оси S-S, причем при круговом обзоре, например, телескопом астронавигационной системы летательного аппарата, угол «и изменяется в пределах ±360°. Двухстепенные гироскопы 4 и 5 имеют датчики углов прецессии 5 и 7 и датчики моментов коррекции 5 и Я выполненные в виде двухфазных асинхронных двигателей, каждый из которых содержит, например, одну обмотку управления и одну обмотку возбуждения. Векторы кинетических моментов HI и Яа гироскопов 4 и 5 в неотклоненном положении ориентированы параллельно оптической оси 5-5 связанного с платформой / стабилизируемого оптического прибора 10, например телескопа астронавигационной системы летательного аппарата. С осью Б-Б подвеса наружной рамы 2, совпадающей по направлению с нормальной осью летательного аппарата, связаны стабилизирующий двигатель 11 канала стабилизации угла ап, например двухфазный асинхронный двнгатель, имеющий обмотку унравления, и тахогенератор 12, например, постоянного тока. С двигателем 11, например с его обмоткой управления, соединен выход датчика углов прецессии 6 посредством усилителя 13. Тахогенератор 12 и стабилизирующий двигатель // могут быть заменены двигателем-генератором, содержащим в одном
корпусе двигатель, например асинхронный, и тахогенератор, например, постоянного тока. С осью А-А подвеса платформы / связаны стабилизирующий двигатель 14 канала стабилизации угла рп, например двухфазный асинхронный двигатель, имеющий обмотку управления, и функциональный преобразователь 15, реализующий косекансную зависимость от угла РП положения платформы 1 относительно
наружной рамы 2, выполненный, например, в виде потенциометра. С двигателем 14, например с его обмоткой управления, соединен датчик углов прецессии 7, например, посредством усилителя 16. На корпусе 3 гиростабилизатора установлен гиротахометр 17, ось чувствительности В-В которого ориентирована параллельно оси Б-Б подвеса наружной рамы 2. Выход тахогенератора 12 и выход гиротахометра 17 соединены посредством функционального преобразователя 15 и усилителя 18 с обмотками управления датчиков моментов коррекции 5 и Р. Обмотки возбуждения датчиков моментов коррекции 8 и 9 соединены с выходами соответствующих датчиков углов
прецессии гироскопов б и 7 при помощи усилителей 13 и 16.
Если составляющие Wy и Wx угловой скорости колебаний летательного аппарата на направления осей УН и Xs не равны нулю, а
составляющая направление перпендикуляра ZH к плоскости наружной рамы 2 равна нулю, то гиростабилизатор работает в известном режиме силовой гироскопической стабилизации, удерживая оптическую ось 5-5, параллельную оси Zn, в заданном направлении. Если Wz , а также в случае если одновременно Wzy и , то возникает специфическая реакция гиростабилизатора, проявляющаяся в следующем.
На угловую скорость Wz гиростабилизатор реагирует возмущенным движением платформы 1 вокруг стабилизируемого направления (оси) Zn с угловой скоростью
1
,
и возмущенным движением наружной рамы 2 вокруг оси Б-Б ее подвеса с угловой скоростью
K ,
Колебания наружной рамы 2 с угловой скоростью «к обусловливают появление момента трения МТБ , направленного по оси Б-Б, а колебания наружной рамы 2 с угловой скоростью W обусловливают момент трения МГА ,
направленный по оси А-А. Под действием момента МТБ гироскоп 4 отклоняется на угол
прецессии Gi, а под действием момента МТА гироскоп 5 отклоняется на угол прецессии вг, при этом на оси прецессии гироскопа 4 за два последующих полупериода возникает постоянный по направлению гироскопический момент
па 5 - постоянный по направлению гироскопический момент Мг Я2/пз1п92. Моменты Мг, и Mrj вызывают уход платформы / по осям Б-Б и А-А, а следовательно, и оси 5-5 от заданного направления. Углы прецессии Bi и BS при любых эволгоциях летательного аппарата, оставаясь малыми, находятся в пределах 2-5 угловых минут. Поэтому можно считать
Мг. я.е ,/„
Мг. Я,0,/„
Если непрерывно измерять углы прецессии гироскопов BI и ва и угловую скорость /п платформы 1 вокруг стабилизируемого направления, то моменты Мг, и Мг, можно скомпепсировать соответствующими моментами коррекции Мк, и Мк, .
Для формирования моментов , и Мк, в предлагаемом гиростабилизаторе непрерывно вырабатывается информация об угловой скорости /п возмущенного движения платформы 1 и используется имеющаяся в гиростабилизаторе информация об углах прецессии Bi и Вг.
Угловая скорость /п колебаний платформы / определяется путем измерения угловой скорости ак колебаний наружной рамы 2 с последующим умножением на cosec Рп, так как /п аксозес рп. Угловая скорость «к измеряется тахогенератором 12.
При наличии колебаний или разворотов летательного аппарата с угловой скоростью относительно нормальной оси YC, совпадающей по направлению с осью Б-Б, тахогенератор 12 измеряет алгебраическую сумму угловых скоростей . Для формирования значений Мк, и Мк, необходимо в каждый момент времени измерять только угловую скорость Кк возмущенного движения наружной рамы 2. Угловую скорость фс измеряет гиротахометр 17. Вычитание из суммарного сигнала тахогенератора 12, пропорционального
, сигнала гиротахометра 17, пропо 1ционального , осуществляется по методу сложения напряжений на входе функционального
преобразователя 15, например потенциометра, реализующего косекансную зависимость от угла РП. С выхода преобразователя 15 снимается сигнал, пропорциональный угловой скорости /п возмущенного движения платформы /, который поступает через усилитель 18 на обмотки управления датчиков моментов коррекции 8 и 9, выполненных, например, в виде двухфазных асинхронных двигателей. На обмотку возбуждения датчика моментов коррекции 8 поступает сигнал, пропорциональный углу прецессии Bi, с датчика углов прецессии 6 через усилитель 13, а на обмотку возбуждения датчика моментов коррекции 9 поступает
сигнал, пропорциональный углу прецессии 62, с датчика углов прецессии 7 через усилитель 16. Датчики 8 и 9 создают моменты, пропорциональные произведениям Bi/n и вз/п соответственно по осям прецессии гироскопов 4 и
5, что вызывает прецессию платформы 1 в направлении, противоположном систематическим уходам, вызванным действием моментов Мг, и Mr, .
25
Предмет изобретения
Двухосный гиростабилизатор, содержащий корпус, внутреннюю и наружные рамы и установленные на внутренней раме два двухстепенных гироскопа с датчиками угла, момента и гиромоторами, кинетические моменты которых направлены в неотклоненном положении по стабилизируемому направлению, отличающийся тем, что, с целью повыщения точности
стабилизации, по оси подвеса наружной рамы установлен тахогенератор, а на корпусе гиростабилизатора - гиротахометр, ось чувствительности которого параллельна оси подвеса наружной рамы, причем выходы тахогенератора и гиротахометра соединены со входом дополнительно введенного функционального преобразователя, реализующего косекансную зависимость от угла положения внутренней рамы относительно наружной, а выход функционального преобразователя соединен с двумя обмотками датчиков моментов, две другие обмотки которых подключены к соответствующим датчикам угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1991 |
|
RU2011171C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Способ стабилизации гироскопической платформы | 2023 |
|
RU2826509C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |