Изобретение относится к аппаратуре обработки анализирующего устройства, например, для обработки анализирующего устройства в форме кристалла, на который нанесена группа локализованных химически активных участков, содержащих различные химически активные виды, например различные антитела.
В этом контексте термин "анализ" означает количественный анализ вещества для определения пропорции некоторого ценного или сильнодействующего компонента, например активного компонента в фармацевтическом препарате.
Иммунологический анализ представляет собой методику, при которой определяют наличие вещества (аналита) в биологическом образце, используя иммунологическую реакцию между антителом и антигеном.
В областях химической/ветеринарной диагностики или проверки лекарственных средств необходимо анализировать образцы для определения наличия определенных аналитов. В последнее время предложено обеспечить группу различных антител на соответствующих химически активных участках на такой подложке, как кристалл. Образец наносят на кристалл и после инкубационного периода и других процессов контролируют процесс хемилюминесценции для обнаружения наличия или отсутствия соответствующего элемента на каждом участке. Это более подробно описано в документе ЕР-А-0902394.
Проблема в отношении анализа таких кристаллов состоит в том, что процессы оказываются сложными и требуют осторожного манипулирования кристаллами и, таким образом, значительного вмешательства оператора.
В документе WO-A-93/23732 описано автоматическое устройство нанесения пятен для образцов на предметном стекле, но это является гистохимическим процессом и не имеет существенного значения для анализа.
В соответствии с одним аспектом настоящего изобретения аппаратура обработки анализирующего устройства содержит множество модулей обработки анализирующего устройства, систему транспортирования, включающую в себя узел расположения анализирующего устройства для перемещения анализирующего устройства к каждому модулю обработки, где узел расположения анализирующего устройства приспособлен для перемещения анализирующего устройства к каждому модулю для обеспечения возможности узлу расположения анализирующего устройства перемещать другое анализирующее устройство во время обрабатывания перемещенного анализирующего устройства (устройств), и систему управления для управления работой транспортировочной системы так, что каждое анализирующее устройство перемещается между модулями в заранее определенной последовательности и так, что ряд анализирующих устройств можно обрабатывать в различных модулях одновременно.
Можно разработать усложненную многоцелевую аппаратуру обработки посредством разработки транспортировочной системы, которая может перемещать анализирующее устройство к модулю обработки и передавать анализирующее устройство в модуль, таким образом освобождая транспортировочную систему для перемещения другого анализирующего устройства во время обработки первого. При компьютерном управлении такой аппаратурой одновременно можно обрабатывать большое количество анализирующих устройств.
Можно использовать разнообразные транспортировочные системы. В одном случае можно применять поворотную транспортировочную систему, которая является сравнительно компактной. Простейшая поворотная система включает в себя круглую "ось" и узел расположения анализирующего устройства, смонтированный для перемещения вокруг оси, где ось вращается до выравнивания узла расположения с точкой входа в соответствующий модуль обработки или извлечения блоков хранения.
Более сложные варианты включают в себя поворотные концентрические узлы/модули. Внутренний модуль может действовать как инкубатор/встряхиватель, наружное кольцо которого является транспортировочной системой. Таким образом, инкубатор/встряхиватель может встряхивать с небольшим угловым перемещением относительно вертикальной оси/вала. Инкубатор/встряхиватель может иметь много уровней/стопку.
Блоки хранения можно выталкивать/вдвигать между внутренним инкубатором/встряхивателем и внешней транспортировочной системой посредством, например, узла двухтактного двигателя, расположенного в центре внутреннего "кольца" инкубатора.
В предпочтительном примере транспортировочная система содержит направляющую; узел обработки анализирующего устройства, смонтированный для перемещения по направляющей, и первый двигатель, реагирующий на сигналы управления для перемещения узла обработки анализирующего устройства в положение выравнивания с соответствующими модулями обработки. Направляющая предпочтительно является линейной. Это упрощает и облегчает конструирование и модифицирование такой системы по сравнению, например, с вращательной системой.
В некоторых случаях транспортировочную систему можно изгибать в многоплоскостную систему, образуя, таким образом, более компактную конструкцию, чем конструкция, образованная на одной плоскости.
В некоторых случаях часть транспортировочной системы возле каждого модуля может содержать средство для перемещения анализирующего устройства к модулю и обратно. Однако более простой и предпочтительный подход состоит в том, чтобы обеспечить транспортировочную систему опорой, подвижным образом прикрепленной к направляющей; рычаг для зацепления анализирующего устройства, подвижно прикрепленный к опоре для перемещения в боковом направлении относительно направляющей, и второй двигатель на опоре для сообщения бокового перемещения рычагу. В этом случае рычаг для перемещения анализирующего устройства перемещается с опорой вдоль направляющей, так что требуется только один такой рычаг. Обычно рычаг движется относительно опоры по существу в ортогональном направлении к направляющей, хотя это и не главное.
Рычаг имеет средство для захвата анализирующего устройства, хотя в других случаях рычаг может просто толкать анализирующее устройство к различным местоположениям или соединять с ним другим способом, например магнитной связью.
Однако анализирующее устройство предпочтительно поддерживается в держателе, имеющем форму, которая взаимодействует с возможностью освобождения со средством захвата для образования возможности расположения анализирующего устройства рычагом. Такое устройство более подробно описано в Европейской заявке на патент № 98307732.2.
Можно обеспечивать разнообразные модули. Обычно в их состав входят один или более из:
a) буферного устройства для хранения более одного анализирующего устройства или держателя анализирующего устройства;
b) инкубатора;
c) пункта промывки;
d) пункта формирования изображения анализирующего устройства.
Использование буферного устройства полезно в том отношении, что оно позволяет осуществлять химические реакции, которые требуют времени, в течение которого можно перемещать и подвигать другим образом другие анализирующие устройства. Однако буферное устройство удобно обеспечивается инкубатором. Поскольку анализирующие устройства обычно должны удерживаться в инкубаторе в течение некоторого времени, это обеспечивает двойное полезное назначение в качестве буферного устройства.
Пункт формирования изображения необходим для того, чтобы видеть участки химической реакции после обработки, и важно ограничивать доступ в него окружающего света. Следовательно, необходимо закрывать пункт формирования изображения во время процесса формирования изображения. Этого можно добиться посредством отдельно функционирующей дверцы, через которую проходит анализирующее устройство. Этот процесс можно упростить посредством снабжения пункта формирования изображения входной дверцей, способной автоматически приводиться в действие во время перемещения анализирующего устройства к пункту формирования изображения и из него.
Это автоматическое приведение в действие можно получить, используя датчики и подобные элементы для контроля за перемещением анализирующего устройства и систему, реагирующую на датчики для открывания дверцы. Однако дверца предпочтительно поворачивается относительно верхней горизонтальной оси к стенке пункта формирования изображения и соединяется с подвижной платформой пункта формирования изображения посредством соединения, поворачиваемого и к платформе, и к дверце, благодаря чему перемещение платформы к дверце с любой ее стороны вызывает открывание дверцы и после этого закрывание ее, как только платформа полностью пройдет от одной стороны к другой.
Как упоминалось выше, важным модулем для использования во время процесса иммунологического анализа является инкубатор. Кроме того, обычно оказывается необходимым встряхивать или приводить в колебательное движение анализирующее устройство для инициирования проходящих химических реакций.
Некоторые примеры инкубаторов описаны в работе Шана Бека "Внешние встряхиватели/инкубаторы" 17 августа 1998 года. Однако они относительно просты.
В соответствии со вторым аспектом настоящего изобретения инкубатор анализирующих устройств содержит корпус и набор опор для анализирующих устройств, расположенных внутри корпуса; средство для независимого нагрева каждого анализирующего устройства в корпусе и средство для встряхивания опоры относительно корпуса.
В отличие от других систем этот новый инкубатор позволяет одновременно выполнять встряхивание, инкубацию и точное независимое управление нагревом, так что не требуется перемещения между отдельными модулями встряхивания и инкубации во время периода химической реакции.
Частота встряхивания средства встряхивателя предпочтительно переменная, тогда как длина хода может быть постоянной или переменной. Ход может осуществляться просто вперед и назад при горизонтальном, вертикальном, орбитальном перемещениях или любом их сочетании. Обычно тип перемещения выбирают для оптимизации процедур перемешивания и скорости химической реакции. Кроме того, для оптимизации химической реакции в процесс встряхивания можно включать периодические остановки.
Хотя транспортировочная система может быть регулируемой для загрузки анализирующих устройств в соответствующие местоположения в инкубаторе, когда опоры располагаются в различных вертикальных местоположениях в блоке опор, блок опор предпочтительно может перемещаться в вертикальном направлении для выравнивания выбранной опоры с транспортировочной системой аппаратуры.
Дополнительным модулем, который используется в таком процессе анализа, как процесс иммунологического анализа, является модуль промывания. Обычно такие модули включают в себя зонд для подачи промывочной текучей" среды и зонд аспиратора для удаления промывочной текучей среды.
В соответствии с третьим аспектом настоящего изобретения обеспечивается модуль промывания анализирующего устройства для его промывания, расположенного в держателе ячеек анализирующих устройств, где модуль содержит зонд подачи промывочной жидкости и зонд аспирации, прикрепленные к подвижной опоре, причем зонд аспиратора смонтирован под углом к вертикали, а опора способна двигаться по существу под таким же углом, благодаря чему когда зонд аспиратора вводится в держатель ячеек, он приводится близко к боковой стороне держателя ячеек.
Этот новый модуль промывания улучшает отсасывание жидкости из держателя ячеек посредством направления зонда аспиратора под углом так, что он располагается близко к боковой стороне держателя ячеек и, следовательно, рядом с каналом, который образуется между анализирующим устройством и держателем ячеек. В таком случае это полностью устраняет любую опасность контакта с активной областью и повреждения анализирующего устройства, получая значительно лучшее отсасывание, поскольку жидкость вытягивается из канала вокруг анализирующего устройства.
Необходимо промывать зонды между каждой операцией промывки анализирующего устройства, поэтому область промывки зондов предпочтительно располагают ниже местоположения промывки держателя ячеек, причем опору можно перемещать при отсутствии держателя ячеек для приведения зонда аспиратора в область промывки. Это обеспечивает удобный способ промывания зондов, сохраняя автоматическую работу модуля промывания.
Модуль предпочтительно дополнительно содержит систему создания вакуума, соединенную с зондом аспиратора, причем система создания вакуума включает в себя вакуумный сосуд, имеющий первую часть, соединенную с источником вакуума, вторую часть, соединенную с зондом аспиратора, и третью часть, соединенную со сливом через дренажный насос.
Теперь будет описана соответствующая изобретению аппаратура обработки анализирующего устройства со ссылкой на прилагаемые чертежи, на которых:
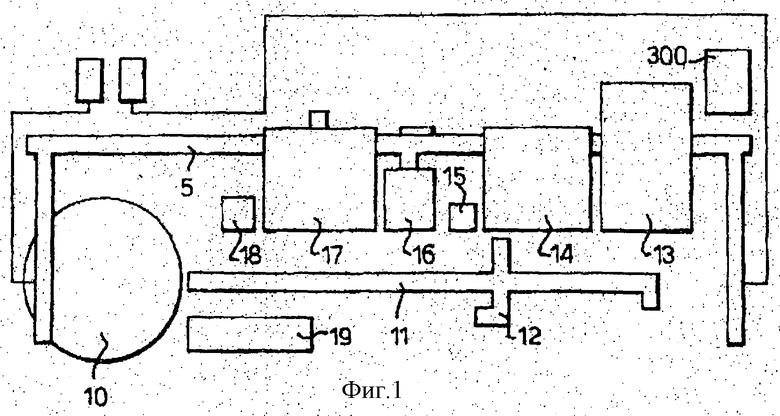
фиг.1 представляет блок-схему аппаратуры;
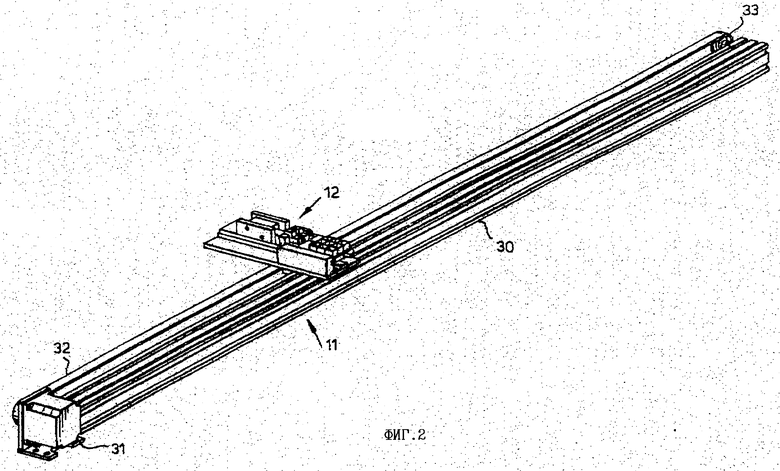
фиг.2 представляет изображение в перспективе главной транспортировочной системы;
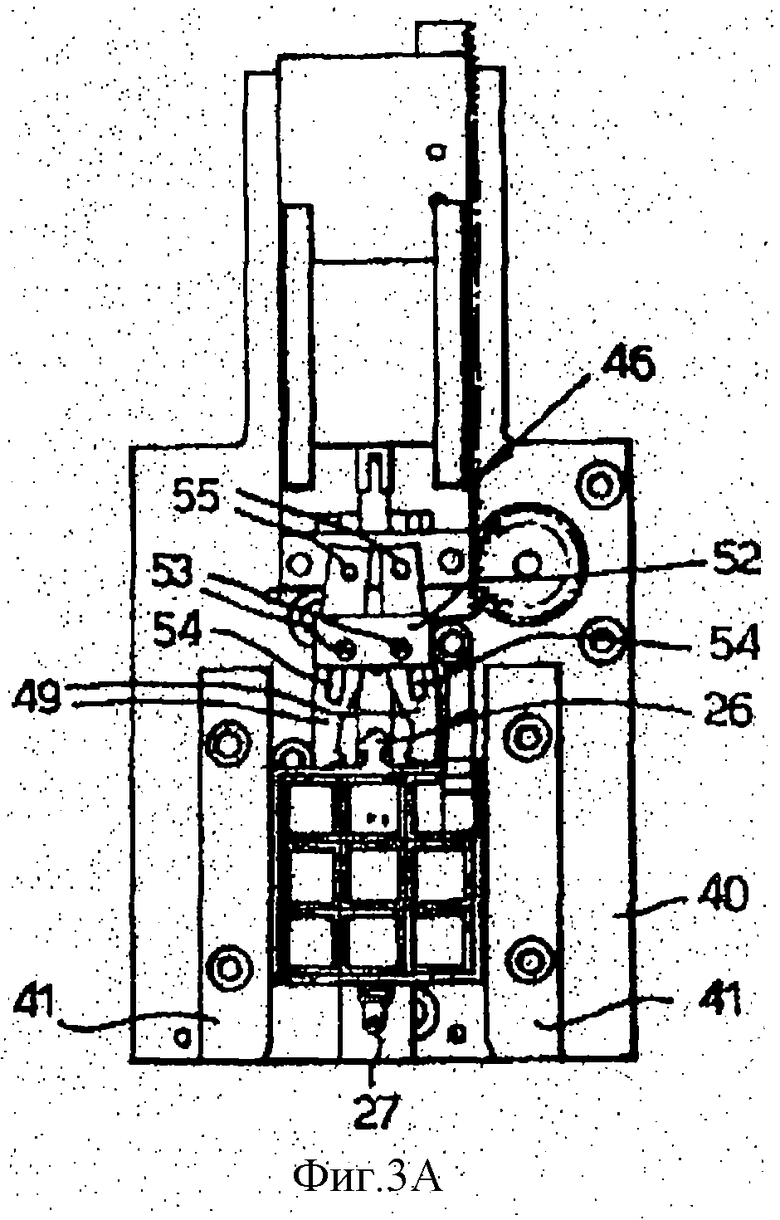
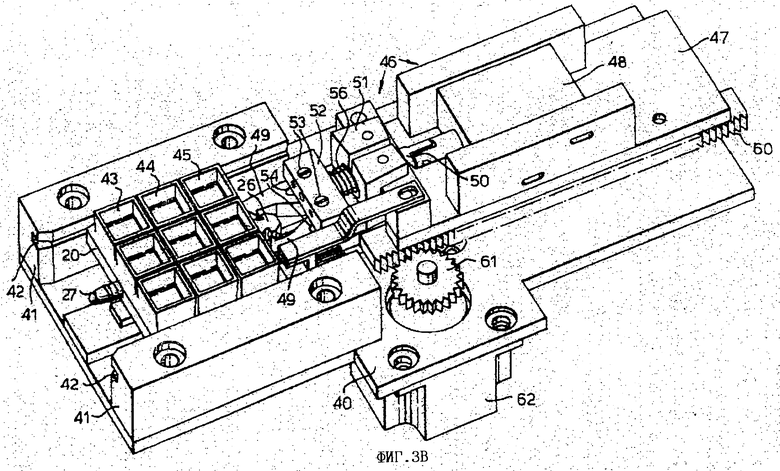
фиг.3А и 3В представляют изображение в плане и в перспективе соответственно модуля рычага захвата транспортировочной системы;
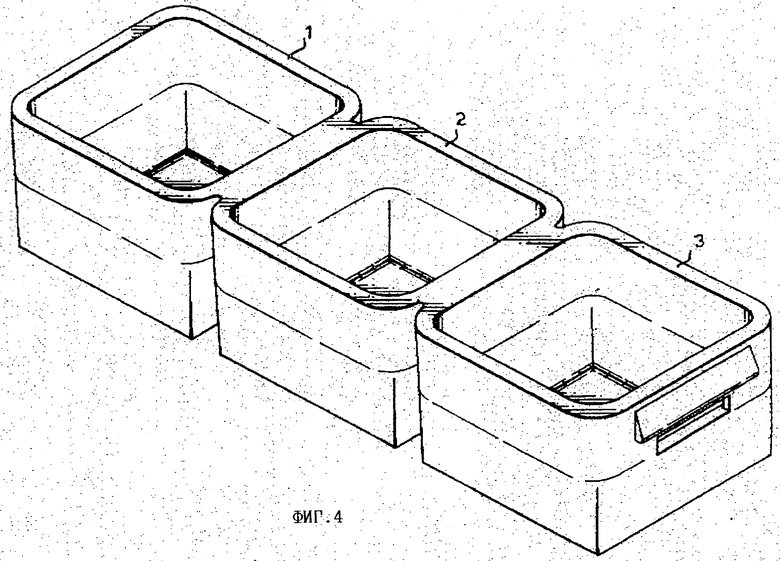
фиг.4 представляет изображение в перспективе группы ячеек хранения;
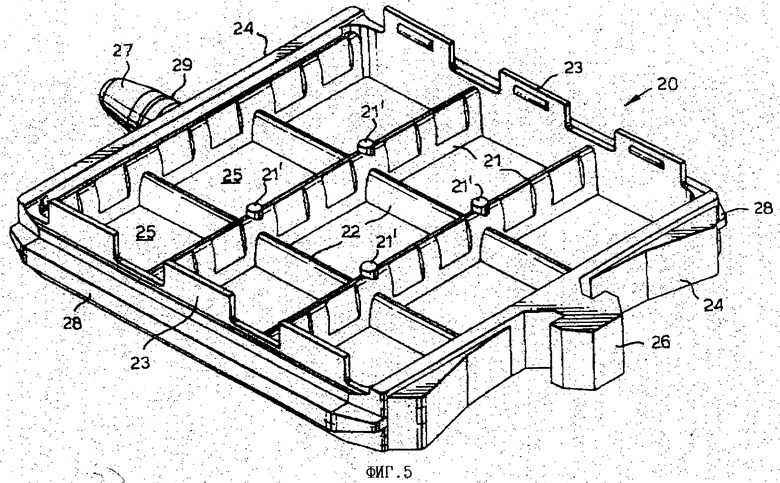
фиг.5 представляет изображение в перспективе лотка переноски для группы ячеек хранения, показанных на фиг.4;
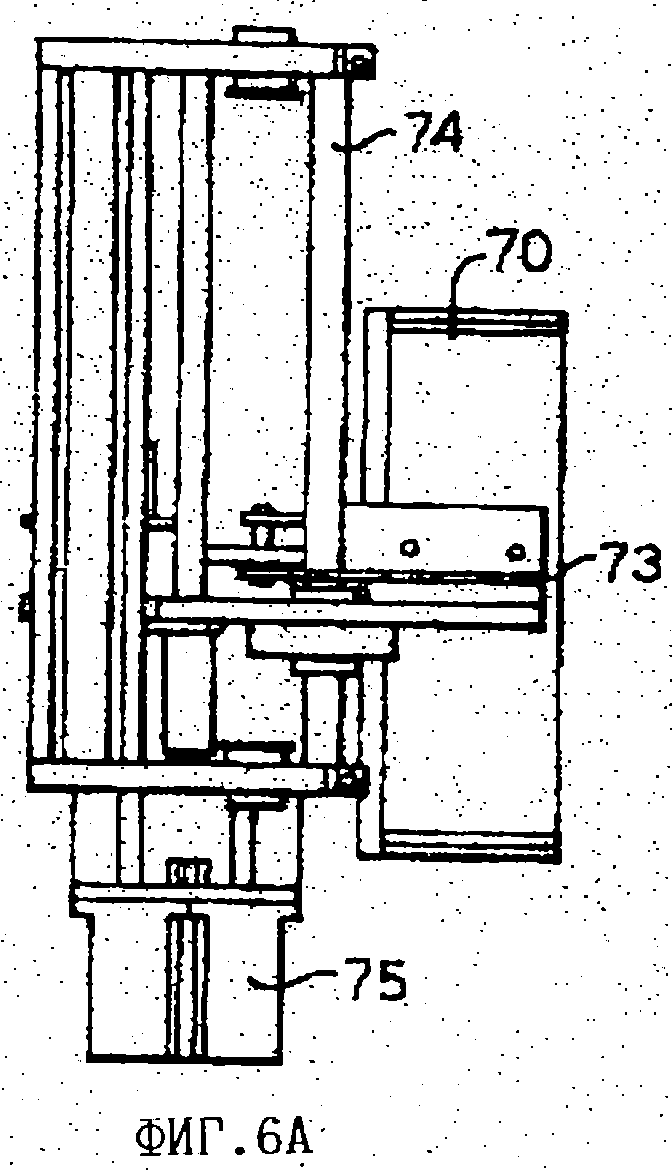
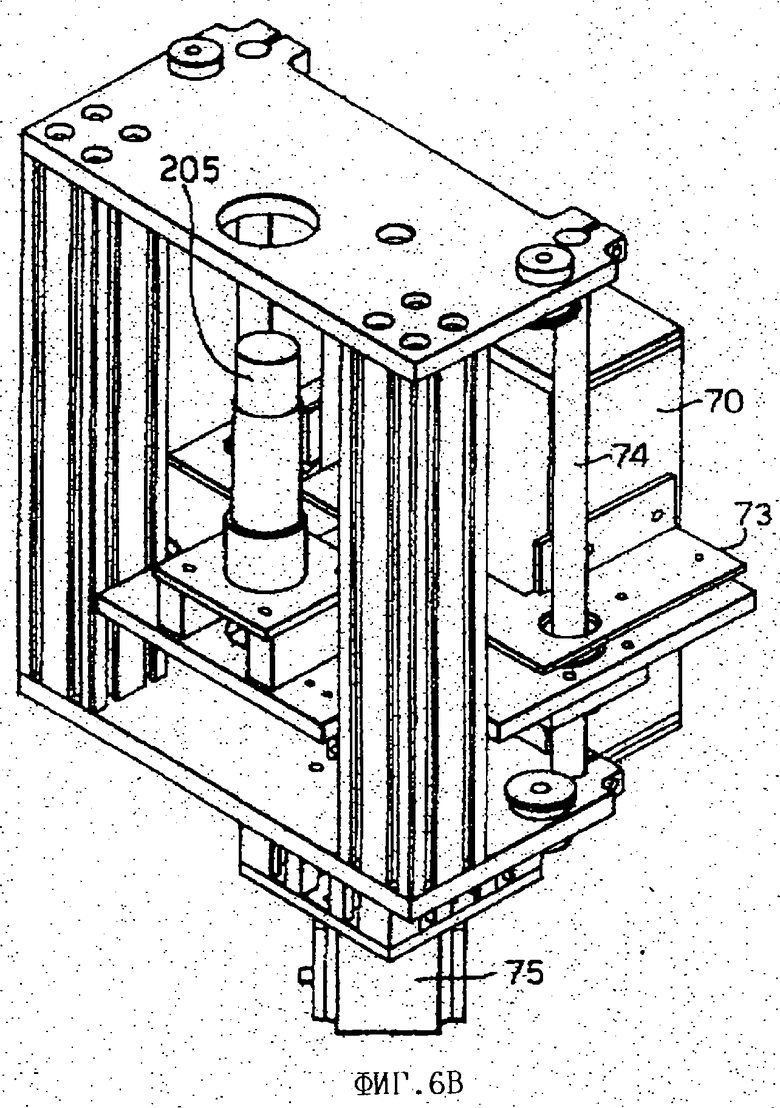
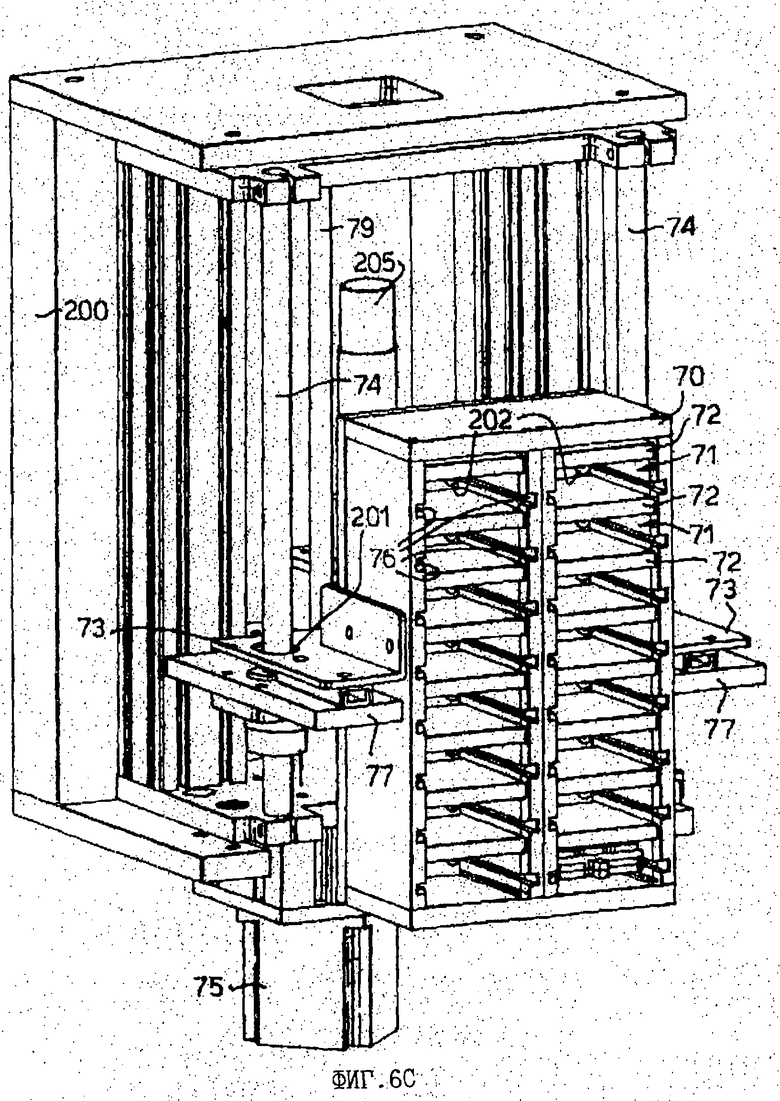
фиг.6A-6D представляют вид сбоку, изображение в перспективе сверху, с одной стороны и сзади, изображение в перспективе сверху, спереди и с одной стороны и изображение в перспективе сверху, спереди и с другой стороны соответственно модуля инкубатора/встряхивателя;
фиг.6Е представляет схематический вид устройства встряхивателя;
фиг.7 представляет изображение в перспективе модуля промывки рамы с опущенными некоторыми деталями для ясности;
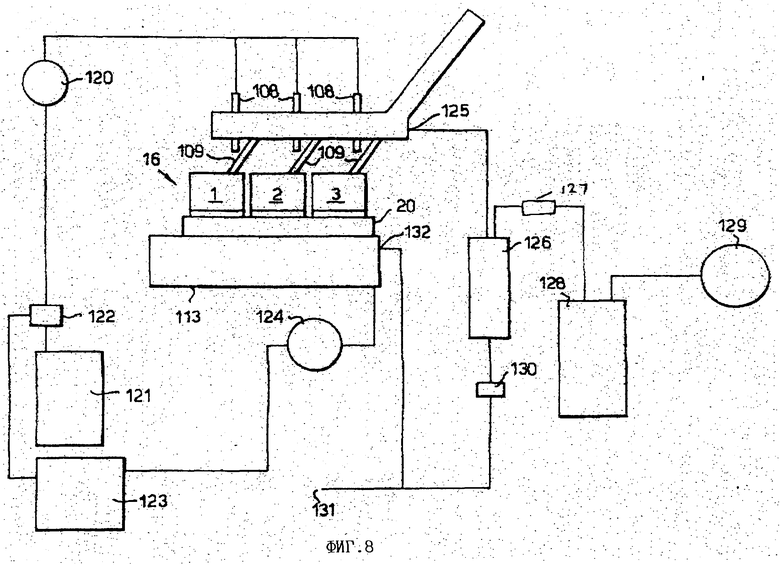
фиг.8 представляет блок-схему системы промывки для показанного на фиг.7 модуля промывки рамы;
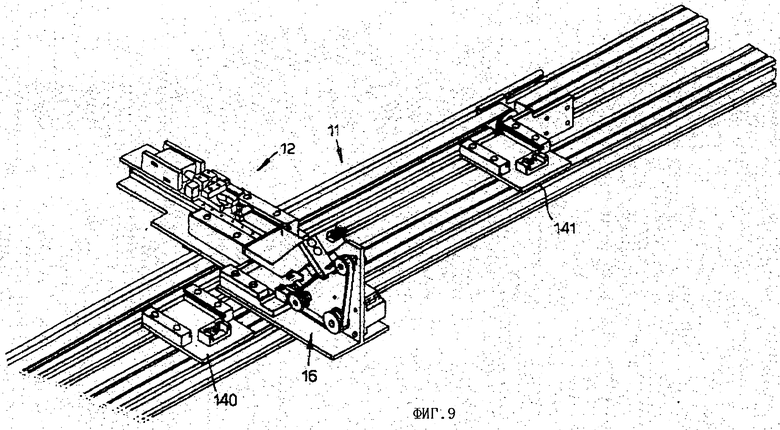
фиг.9 иллюстрирует относительные расположения между модулем промывки рамы и главной транспортировочной системой на изображении в перспективе;
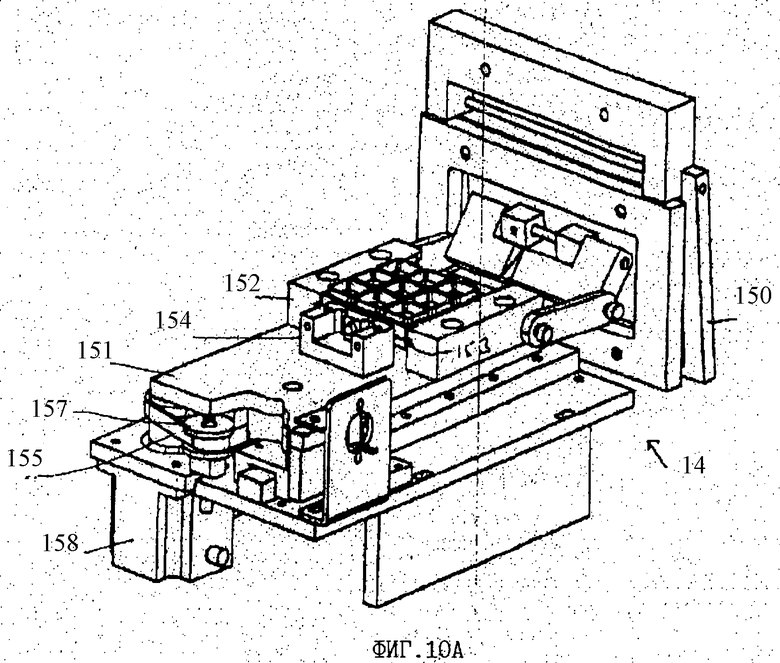
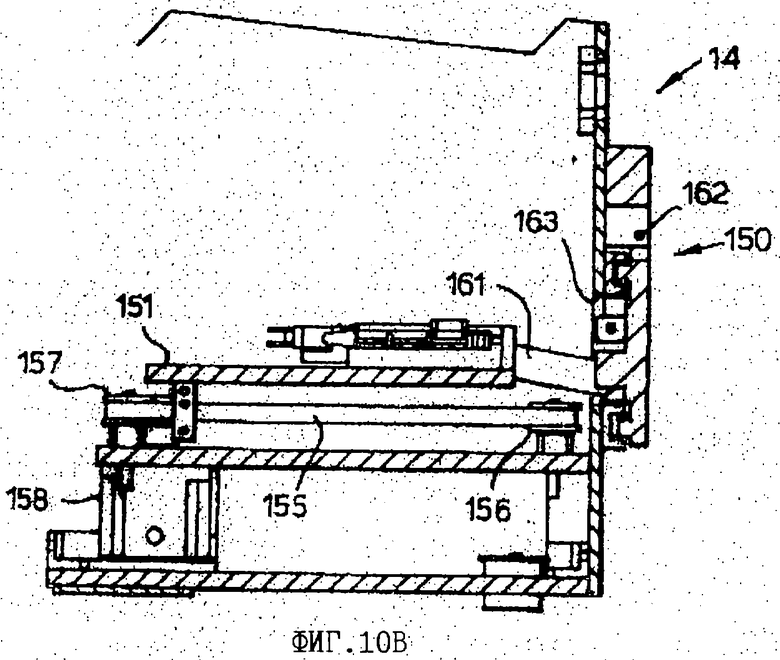
фиг 10А представляет изображение в перспективе части модуля формирования изображения; фиг.10В представляет поперечное сечение через показанные на фиг.10А компоненты;
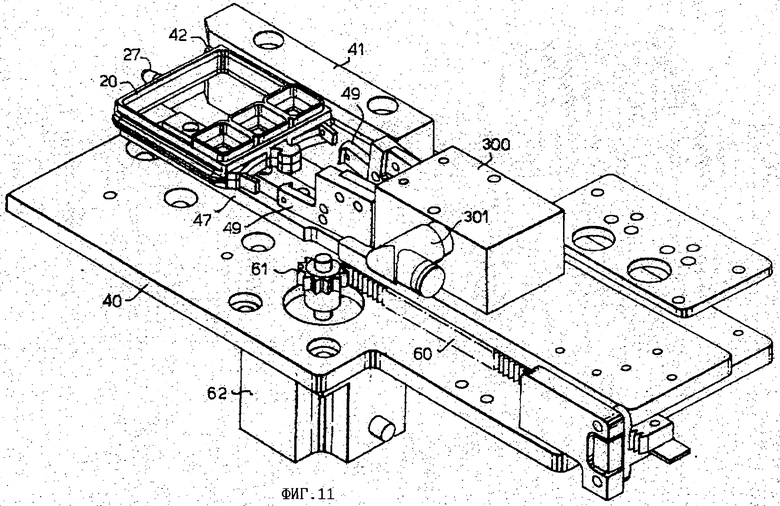
фиг.11 представляет вид, аналогичный фиг.3В, но другого примера и с опущенными теми же деталями;
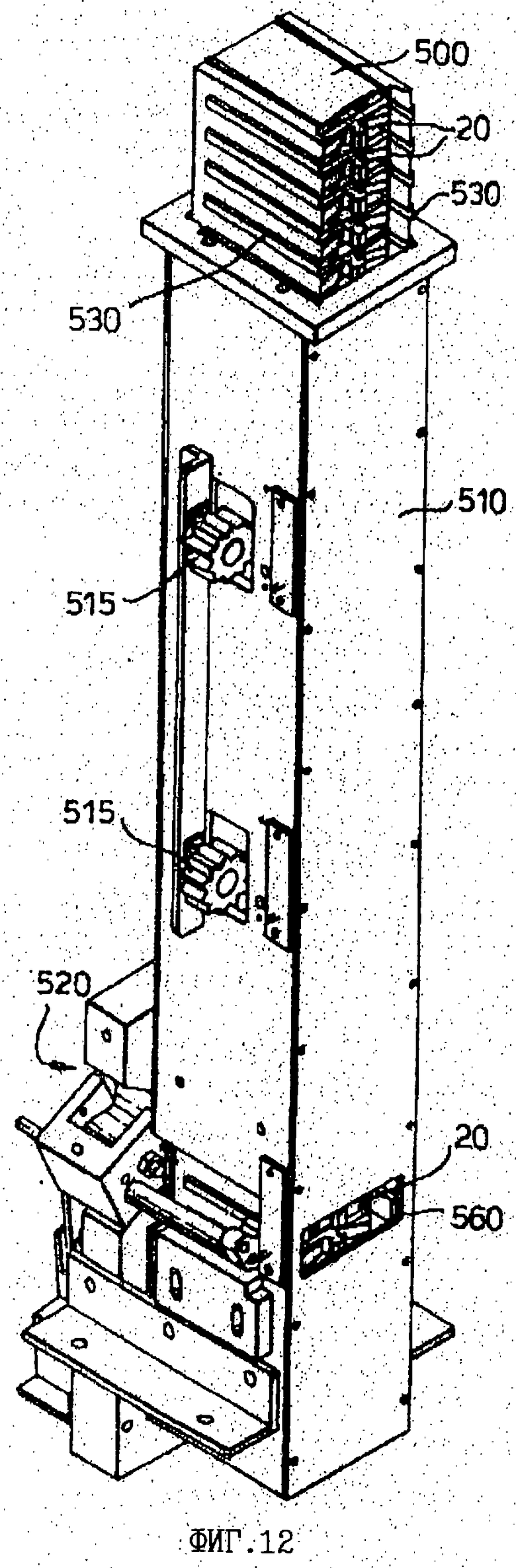
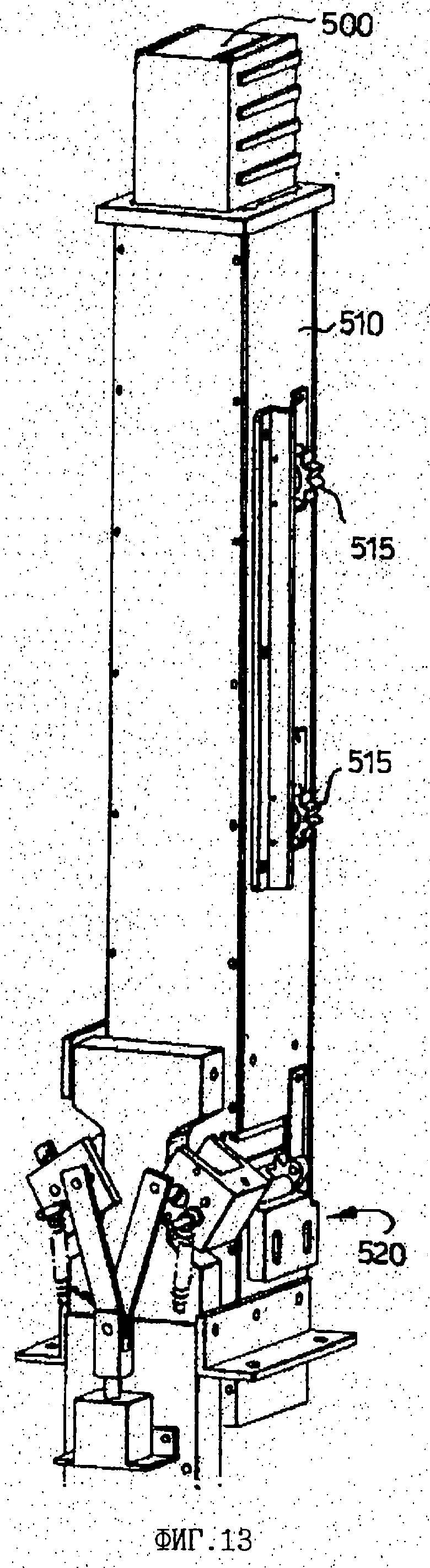
фиг.12 представляет изображение в перспективе с одной стороны устройства загрузки стопки;
фиг.13 представляет изображение в перспективе показанного на фиг.12 устройства загрузки стопки с другой стороны;
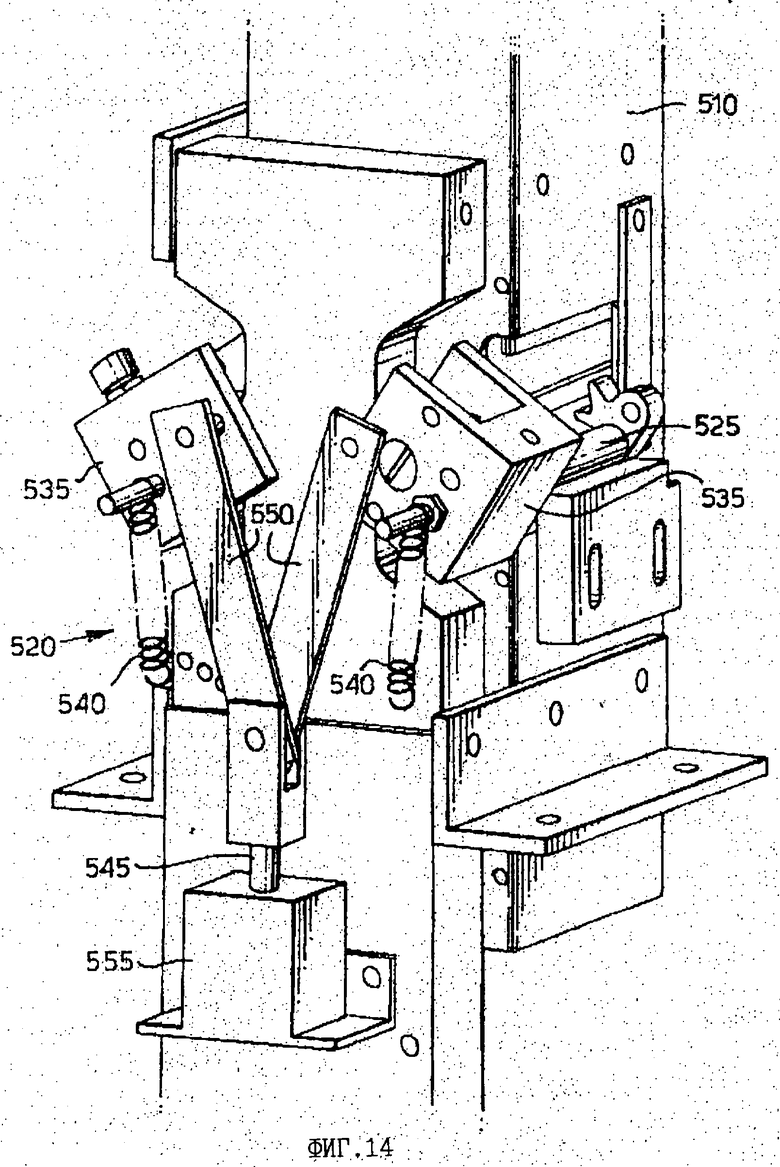
фиг.14 представляет увеличенное изображение в перспективе части показанного на фиг.12 и 13 устройства загрузки стопки.
Аппаратура иммунологического анализа, показанная на чертежах, сконструирована для обработки кристаллов анализирующих устройств, на которых нанесена группа локализованных химически активных участков, содержащих различные антитела. Кристаллы обычно являются керамическими или кремниевыми. Их снабжают "наносимыми на заводе пятнами", представляющими группу химически активных участков, и для легкости манипулирования располагают в соответствующих ячейках 1-3 хранения (фиг.4). Обычно группу ячеек хранения и кристаллов упаковывают для посылки удаленному пользователю. Это более подробно описано в находящейся в процессе одновременного рассмотрения Европейской заявке на патент № 98307732.2. В целях дальнейшего облегчения манипулирования группы ячеек 1-3 хранения монтируют с возможностью демонтажа в лотке 20 переноса. Этот лоток переноса (фиг.5) изготавливается из отливаемых в форме пластмасс и имеет две группы поперечин 21, 22, проходящих между противоположными боковыми стенками 23, 24 соответственно. Приподнятые выступы 21’ помогают располагать ячейки. Определены девять гнезд 25, в которые можно размещать соответствующие ячейки хранения. Лоток имеет фланцевый выступ 26 на одной боковой стороне и выступающий прилив 27 на противоположной стороне, а их назначение более подробно будет описано ниже. Каждый комплект из трех ячеек 1-3 хранения загружают параллельно поперечинам 21, а поперечины 22 проходят между соседними ячейками хранения. Загруженный лоток держателя уплотняют соответствующими уплотняющими материалами для транспортирования. Ячейки хранения предпочтительно оставляют на месте в лотке держателя, а лоток используют для перемещения ячеек хранения при процессе иммунологического анализа. В качестве альтернативы ячейки хранения можно поставлять отдельно или вынутыми из лотка держателя.
В зависимости от количества подлежащих испытанию образцов пользователь может принять решение в отношении того, разместить ли одну, две или три группы.
Фиг.1 иллюстрирует основные компоненты аппаратуры в виде блок-схемы. Аппаратура содержит лоток 10 образцов, который удерживает ряд подлежащих обработке образцов. Он расположен рядом с одним концом главной транспортировочной системы 11, несущей модуль 12 рычага захвата. Как будет более подробно описано ниже, модуль 12 рычага захвата может перемещаться в положение выравнивания с рядом модулей обработки, расположенных рядом с главной транспортировочной системой 11. Эти модули включают в себя модуль 13 ввода рамы, модуль 14 формирования изображения, модуль 15 сигнального реактива, модуль 16 промывки рамы, модуль 17 инкубатора/встряхивателя, модуль 18 приготовления и устройство хранения 19 реактивов. Кроме того, над модулями и главной транспортировочной системой расположена система 5 манипулирования жидкостью.
При необходимости можно включать другие модули, и одно из преимуществ аппаратуры состоит в том, что дополнительные модули можно легко вводить. Например, для рычага взятия проб и рычага реактива обеспечивается маленький модуль промывки зондов.
Управление аппаратурой осуществляется микропроцессором 300, связанным с каждым модулем и с главной транспортировочной системой 11, а также с системой 5 манипулирования жидкостью.
Главная транспортировочная система 11
Главная транспортировочная система 11 более подробно показана на фиг.2 и содержит удлиненную направляющую 30, образующую ползун, на котором смонтирован модуль 12 рычага захвата. На одном конце направляющей 30 смонтирован шаговый двигатель 31, управляемый микропроцессором и соединенный с приводным ремнем 32, который проходит вокруг поддерживающего ролика 33 на другом конце направляющей 30. Ремень 32 прикреплен к нижней стороне модуля 32 рычага захвата. Под действием соответствующих команд продвижения вперед, подаваемых на шаговый двигатель 31, ремень 32 может точно перемещаться вперед и назад, чтобы обеспечить возможность модулю 12 рычага захвата перемещаться напротив одного из выбранных модулей 10, 13-19. Хотя и не показано, ремень 32 предпочтительно закрывают.
Модуль рычага захвата показан на фиг.3А и 3В. Модуль содержит платформу 40, на которой смонтирована пара разнесенных в боковом направлении опор 41, имеющих соответствующие канавки 42, которые расположены на одной прямой. Эти канавки предназначены для расположения в них ползунов 28, расположенных на противоположных боковых сторонах лотка 20 держателя (фиг.5). На фиг.3 показан такой лоток 20, расположенный в модуле рычага захвата. На лотке 20 держателя смонтированы три комплекта ячеек 43-45 хранения.
Узел 46 рычага захвата смонтирован для скользящего рычага перемещения на платформе 40 и содержит вспомогательную платформу 47, к которой прикреплен соленоид 48. Соленоид 48 соединен с парой кулачков 49 через узел 50 шарнирно соединенного штока, который проходит через корпус 51 опоры и оканчивается в блоке 52 управления, имеющий пару зависящих штифтов 53, которые проходят в прорези 54 в кулачках 49. Кулачки 49 поворачиваются к основанию 40, как показано позицией 55 на фиг.3А.
Узел 50 шарнирно соединенного штока форсируется в вытянутое положение, как показано на фиг.3В, посредством нажимной пружины 56. Таким образом, блок 52 управления форсируется от соленоида 48, и ввиду взаимодействия между штифтами 53 и прорезями 54 это перемещение вызывает смыкание кулачков 49 вокруг фланцевого выступа 26, чтобы жестко удерживать лоток 20 держателя на модуле рычага захвата. При приведении в действие соленоида 48 узел 50 шарнирно соединенного штока отводится в соленоид против действия пружины, соответствующее перемещение блока 52 относительно кулачков 49 вызывает расхождение кулачков, освобождая, таким образом, лоток 20 держателя.
Перемещение узла 46 рычага захвата управляется посредством зубчатой рейки 60 и шестерни 61, причем шестерня 61 подсоединена к шаговому двигателю 62, смонтированному на нижней стороне платформы 40. Управление шаговым двигателем 62 осуществляется микропроцессором, чтобы перемещать лоток 20 держателя к модулю, с которым он выравнен, и от него.
На фиг.11 показана альтернативная форма узла рычага захвата. На этом рисунке для обозначения аналогичных компонентов использованы те же ссылочные позиции, как и на фиг.3В. Разница между двумя узлами рычагов захвата состоит в том, что на фиг.11 кулачки 49 приводятся в действие пневматическим блоком 300, снабжаемым воздухом под давлением через впускной канал 301.
Между прочим, следует также отметить, что вместо электрического приведения в действие для других блоков в аппаратуре можно использовать пневматику.
При обычной последовательности работы блок 12 рычага захвата перемещается по направляющей 11 главной транспортировочной системы в положение напротив требуемого модуля. Затем приводится в действие двигатель 62 для перемещения пластины 47 и лотка 20 держателя вместе влево, как показано на фиг.3В, лоток 20 переводится из канавок 42 в соответствующие канавки, предусмотренные в принимающем модуле. После этого лоток 20 держателя удерживается посредством зацепления между приливом 27 и уплотнением Бола, смонтированным на заднем конце опорной поверхности. Это уплотнение Бола представляет собой круглую пружину, которая расположена в круглой канавке 29 (фиг.5) на задней части прилива 27. Преимущество такого устройства состоит в том, что уплотнение Бола может удерживать лоток 20 держателя сравнительно жестко, но легко освобождает лоток держателя при его вытягивании кулачками 49. Однако предполагаются также альтернативные методы удержания лотка держателя, включая магнитные защелки и другие.
Как только прилив 27 жестко войдет в соответствующее уплотнение Бола (что может определяться микровыключателем и (или) последующим определенным заранее установленным количеством ступеней шагового двигателя 62), соленоид приводится в действие для отпускания кулачков 49, а затем двигатель приводится в противоположном направлении для отведения узла кулачков.
Вначале в аппаратуру необходимо подать рамы, поддерживаемые в соответствующих лотках 20 держателя, и это можно делать любым обычным способом. При одном способе рамы (или группы ячеек хранения) и лотки держателей предварительно упаковывают и подают на катушки, чтобы обеспечить ряд различных подлежащих выполнению анализов. Катушка смонтирована в блоке 13 ввода рамы, где можно разматывать лоток и ячейки хранения и подавать на платформу 40 модуля 12 рычага захвата, который подходящим образом располагается рядом с блоком ввода рамы.
На фиг.12-14 показана предпочтительная форма загрузчика стопки для составления модуля 13 ввода рамы. В этом случае стопку лотков 20 загружают в держатель 500, который опускают в верхнюю часть "трубы" 510 загрузчика стопки. Пара зубчатых колес 515 на боковой стороне трубы 510 загрузчика стопки действует так, чтобы замедлять ход стопки при ее опускании под действием силы тяжести посредством зацепления расположенными напротив парами ступенек 530 на боковой стороне держателя. Опускающаяся стопка останавливается при встрече ранее загруженной стопки или, если загрузчик стопки пустой, при встрече с механизмом 520 приращения.
Механизм 520 приращения более подробно показан на фиг.14. Механизм содержит пару консолей 525 с одним зубцом (на фиг.14 видна только одна), которые зацепляют расположенные напротив ступеньки 530 на держателе 500. Консоли 525 соединены с поворотными блоками 535, которые форсируются к местоположению, показанному на фиг.14, посредством соответствующих нажимных пружин 540. Перемещение блоков вызывает пневматический исполнительный механизм 555, соединенный с приводимым в действие пневматическим способом поршнем 545, соединенным посредством соединительных плеч 550 с каждым блоком 535.
Когда пневматический исполнительный механизм 555 на мгновение приводится в действие, шток 545 перемещается вверх, вызывая соответствующее поворотное перемещение блоков 535 и консолей 525, освобождая, таким образом, зубцы на консолях 525 от соответствующих ступенек 530, что позволяет опускаться держателю. Поскольку это освобождение осуществляется только на мгновение, консоли 525 под воздействием пружин 540 сразу же поворачиваются обратно в их удерживающее положение, так что зубцы зацепляют следующие ступени 530.
Когда держатель 500 удерживается зубчатыми консолями 525, лоток 20 переноса выравнивается с выходным отверстием 560.
В некоторых случаях можно использовать более одного устройства удержания стопки. Более того, можно обеспечить линейную систему подачи (не показанную) для подачи ряда стопок в слегка наклоненной вниз стопке к верхней части устройства удержания стопки.
Испытываемые образцы вручную загружают в стандартный имеющийся в продаже лоток 10 для образцов, в котором размещают множество пробирок и чаш с различными образцами. (Вместо этого можно использовать рамочную или другую загрузочную систему (не показанную)). После этого аппаратура приводится в действие и модуль 12 рычага захвата движется к пункту 18’ приготовления. Затем система 5 манипулирования жидкостью программируется для извлечения части каждого жидкого образца из лотка 10 и добавления его к одному кристаллу/ячейке, расположенному на держателе 20 в пункте 18 приготовления. Из того же или другого образца будут извлекаться дополнительные части и по очереди добавляться в следующие ячейки, пока не будут заполнены все три рамы ячеек хранения или требуемое количество ячеек хранения.
Затем модуль 12 рычага захвата перемещается к хранилищу 19 реактивов и части реактивов из этого модуля извлекаются посредством системы манипулирования жидкостью и добавляются в каждую ячейку хранения. После этого держатель 20 и ячейки хранения перемещаются главной транспортировочной системой 11 к блоку 17 инкубатора/встряхивателя.
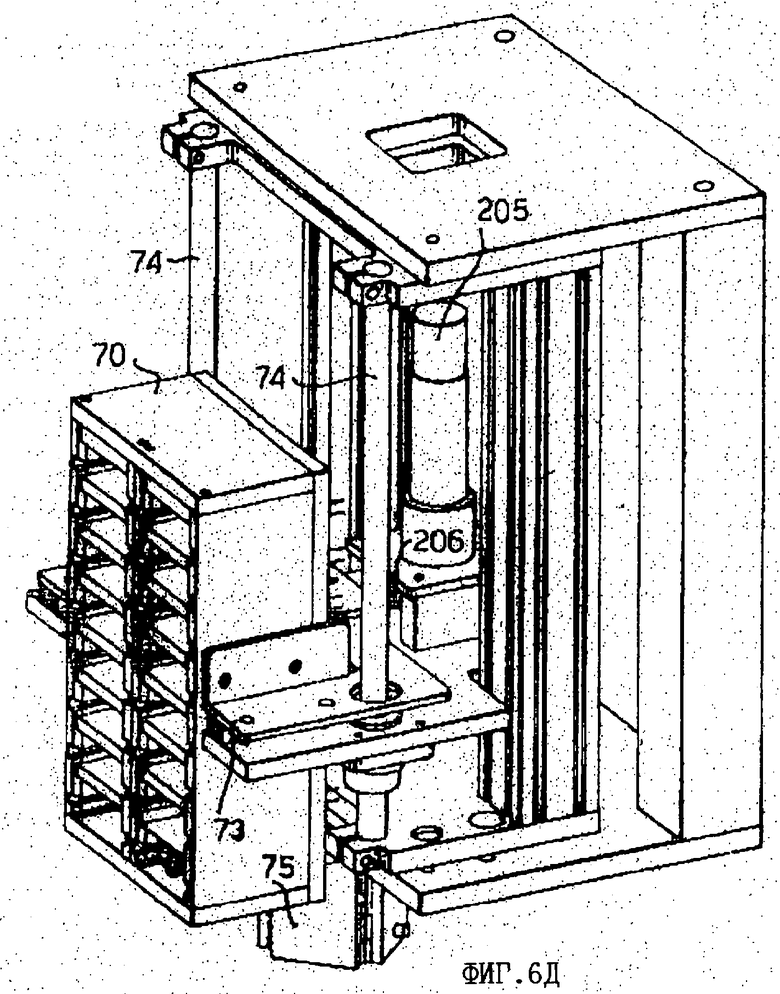
Блок 17 инкубатора/встряхивателя
В противоположность обычному инкубатору этот модуль более подробно показанный на фиг.6, также встряхивает лоток держателя и ячейки хранения для инициирования проходящих химических реакций. Кроме того, он действует в качестве буферного устройства, поскольку он может удерживать более одного лотка держателя.
Модуль 17 инкубатора/встряхивателя содержит опорный блок 70, определяющий набор отдельных отсеков или ниш 71 (шестнадцать в данном случае, расположенных двумя колонками по восемь). Каждый отсек 71 имеет пару канавок 76, в которые модуль 12 рычага захвата может вдвигать лоток 20 держателя. Кроме того, каждый отсек имеет нагревательный элемент и датчик 72 управления температурой, расположенный над канавками 76.
Обычно управление температурой каждого отсека 71 и связанного анализирующего устройства (содержащего реагенты и биокристаллы) осуществляется независимо через микропроцессор (не показанный) и может устанавливаться на величину 37°С для применений иммунологического анализа. Однако если необходимо, то температуру каждого отсека можно регулировать отдельно. Можно использовать температуры от комнатной до величины выше 70°С. В случае соответствующих анализирующего устройства, датчика и других компонентов/материалов инкубатора можно получить даже более высокие температуры. Можно применять определенные профили температур/времени, чтобы удовлетворить требованиям обработки анализа, например, температуру, быстро возрастающую до 70°С.
В настоящей конструкции отсеки 71 открыты на одном конце. В отсеках 71 и в анализирующем устройстве можно даже точнее и равномернее поддерживать управление температурой посредством обеспечения каждого отсека отдельной или общей/совместно используемой дверцей (не показанной). Дверца (дверцы) открываются и закрываются для обеспечения возможности введения/изъятия анализирующего устройства. Дверцы или дверца ограничивают воздушный поток и потери тепла на остальное устройство, снижая тем самым требуемое подведение тепла. (Минимизируется также вырабатывание тепла внутри устройства). Конструкция отсека и дверцы из изоляционных материалов также снижает потери тепла и потребности в подведении тепла.
Альтернативой индивидуальным дверцам и, возможно, механически более простым вариантом является обеспечить неподвижную изолирующую стенку впереди и близко к открытым отсекам подвижного блока инкубатора/встряхивателя. Доступ к отдельным отсекам осуществляется через одну дверцу в стенке на колонку отсеков. Дверцу или дверцы в этой изоляционной стенке располагают рядом с главной осью транспортирования, и они индивидуально открываются/закрываются для обеспечения возможности расположения анализирующего устройства в соседних колонках инкубатора.
Другой способ (не показанный) включает в себя полное заключение существующего инкубатора/встряхивателя в большей камере с управляемой температурой. Температуру внешней камеры поддерживают генератором горячего воздуха на уровне несколько ниже требуемой самой низкой температуры отсека инкубатора. Маленький дополнительный ввод тепла отдельных нагревательных элементов в каждом отсеке позволяет осуществлять даже более точное управление температурой отдельных отсеков.
Блок 70 поддерживается посредством фланцевых элементов 73 на соответствующих опорах 77, прикрепленных к главному корпусу 200 и направляется для вертикального перемещения парой идущих в вертикальном направлении стержней 74, проходящих через отверстия 201 во фланцевых элементах 73. Это позволяет располагать любой один из разнесенных в вертикальном направлении отсеков 71 на одной прямой с модулем 12 рычага захвата. Задняя часть каждого отсека 71 снабжена ранее описанным уплотнением 202 Бола, так что когда лоток 20 держателя вдвигают в канавки 76, прилив 27 зацепляется и удерживается уплотнением Бола.
Вертикальное перемещение блока 70 осуществляется шаговым двигателем 75, связанным с одной из опор 77 посредством стержня 79 с винтовой резьбой, связанного с опорой. Шаговым двигателем 75 управляет микропроцессор.
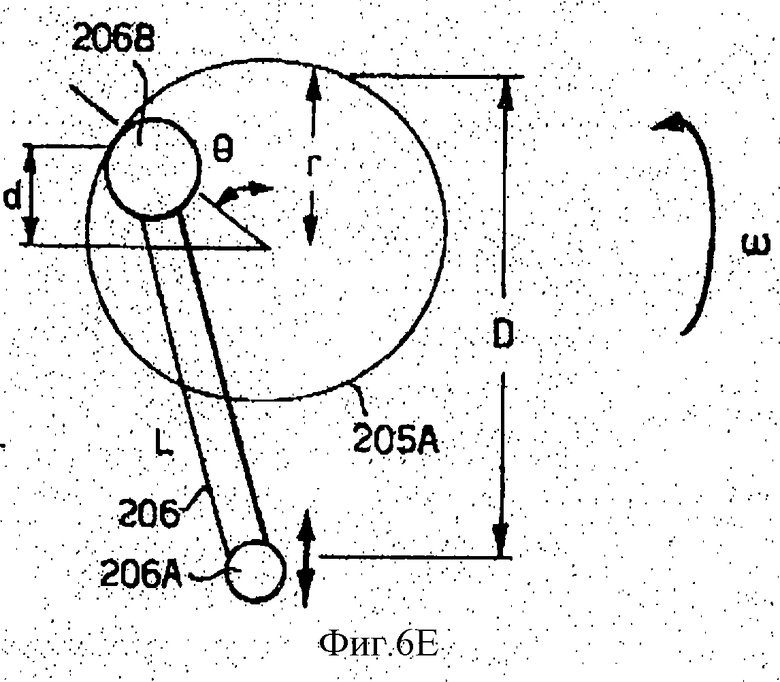
Дополнительно к описанному вертикальному перемещению для обеспечения возможности выравнивания блока 70 с модулем 12 рычага захвата инкубатор может также вызывать горизонтальное встряхивающее перемещение блока 70. Таким образом, следует отметить, что блок 70 свободно крепится относительно опорных стержней 74 через фланцевые элементы 73, где эти фланцевые элементы 73 скользят на опорах 77. Это означает, что блок 70 можно встряхивать вперед и назад в горизонтальном направлении путем создания скользящего перемещения фланцевых элементов 73 над опорными элементами 77. Это встряхивающее перемещение создается посредством приведения в действие двигателя 205, который вращает вал 205А (фиг.6Е). Соединительный рычаг 206 на одном конце 206А соединен с инкубатором, а на другом конце 206В через приводной штифт с точкой на валу 205А, смещенной от оси вращения.
В альтернативных конструкциях можно использовать вертикальное, орбитальное, горизонтальное перемещение или сочетание любых из этих перемещений.
Частоту, амплитуду (длину хода) и "рабочий профиль" встряхивающего механизма выбирают после исследований характеристик анализа, при которых изменяют частоту и амплитуду, а также сравнивают режим работы (линейный, орбитальный, вращательный и их сочетания) встряхивателя.
В простом случае инкубатор подвергают простому линейному перемещению в соответствии с синусоидальной волной согласно соотношению
Смещение инкубатора

где θ - угловое положение точки 206, θ=2πωt;
ω - частота работы встряхивателя и приводного двигателя (количество периодов в секунду);
t - время (секунды);
L - длина соединительного стержня;
d=rcosθ - смещение приводного штифта.
Ход встряхивателя можно изменять посредством изменения смещения приводного штифта относительно оси двигателя.
Рабочий профиль может также принимать форму программируемой последовательности включения/выключения при постоянных частоте и длине хода, например 5-минутное включение и 1-минутное выключение.
В случае линейного, а также других способов встряхивания влияние на оптимальные частоту и амплитуду встряхивания оказывают, в частности, факторы, влияющие на движение текучей среды в ячейке хранения, например размеры ячейки анализа, профиль стенок ячейки и объем (глубина) текучей среды, а также физические свойства текучей среды и материала ячейки.
Инкубатор, конечно, размещают в обычно закрытом корпусе (не показанном).
Картину частоты движения встряхивателя можно изменять, хотя обычно длину хода устанавливают заранее. Типичная длина хода составляет примерно 2 мм при частоте порядка 10-20 периодов в секунду.
Следует понимать, что посредством сочетания инкубатора и встряхивателя получается снижение времени обработки по сравнению с предыдущим временем, необходимым для отдельных модулей, позволяя тем самым обеспечивать более одного лотка держателя в инкубаторе, одновременно обеспечивая полезную возможность буферного устройства. В частности, следует отметить, что как и в случае других модулей, после перемещения лотка держателя к модулю 17 инкубатора главная транспортировочная система 11 оказывается свободной для манипулирования другим лотком держателя и ячейками хранения, позволяя, таким образом, устройству доводить до максимума количество ячеек, обрабатываемых в любое одно время.
После соответствующего интервала времени для связывания анализирующего вещества с химически активным видом (обычно около 30 минут), лоток 20 держателя отводится модулем 12 рычага захвата и перемещается к модулю 16 промывки рамы.
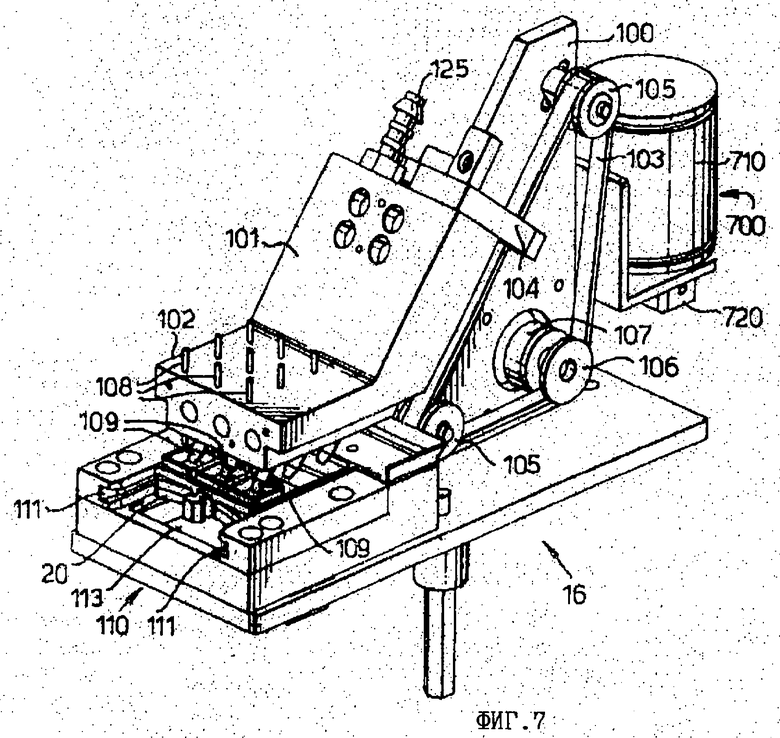
Модуль 16 промывки рамы
Модуль 16 промывки рамы показан на фиг.7 и в схематическом виде на фиг.8. Модуль содержит опорный блок 100 обычно треугольной формы, на котором с возможностью скольжения смонтирован элемент 101, имеющий на нижнем конце идущую в горизонтальном направлении часть 102. Положением элемента 101 вдоль опорного блока 100 управляет ремень 103, к которому в местоположении 104 прикреплен элемент 101, причем ремень проходит вокруг поддерживающих роликов 105 и приводного ролика 106, прикрепленных к опорному блоку 100. Приводным ремнем 106 управляет шаговый двигатель 107, также смонтированный на опорном блоке 100 и управляемый микропроцессором.
Горизонтальная часть 102 элемента 101 поддерживает девять ориентированных в вертикальном направлении инжекторов 108 подачи промывочного вещества и девять изогнутых под углом инжекторов 109 аспиратора, только некоторые из которых можно видеть на чертежах.
Опорная станина 110 лотка держателя смонтирована перед опорным блоком 100 и имеет пару канавок 111, в которые входят ползуны 28 лотка 20 держателя. В этом случае на фиг.7 можно видеть уплотнение 112 Бола, расположенное у задней части опорного узла 110 лотка держателя. Резервуар 113 промывки зондов расположен ниже местоположения лотка держателя.
В процессе использования модуль 12 рычага захвата подает лоток 20 держателя к опорному узлу 110 с расположением ползунов 28 лотка в канавках 111. Лоток держателя проталкивается вперед до зацепления канавки 29 прилива 27 уплотнением Бола (не показанным). Затем модуль 12 рычага захвата отводится, оставляя лоток держателя на месте. В это время элемент 101 находится в его отведенном положении, показанном на фиг.7.
Шаговый двигатель 107 приводится в действие для перемещения элемента 101 вниз, заставляя инжекторы 109 аспиратора войти в соответствующие ячейки 1-3 хранения, пока они почти коснутся кристаллов, расположенных в ячейках хранения. На практике инжектор 109 аспиратора располагают под углом таким образом, чтобы он очень близко подходил к каналу, который образован между кромкой кристалла и боковой стенкой ячейки хранения.
Затем выполняется обычный процесс промывания под управлением микропроцессора, который соединен с различными клапанами и насосами, которые будут описаны в связи с фиг.8. Следует отметить, что клапаны позволяют индивидуально управлять подачей промывочного вещества через более короткие вертикальные инжекторы к каждой раме трех ячеек хранения, и в связи с инжекторами 108 их положение над каждой ячейкой не является критическим. Более длинные наклоненные под углом инжекторы 109 аспираторов отсасывают из точки, близкой (например 100-200 мкм) к кромке кристалла, причем основание и боковая стенка ячейки подвергаются высокой степени удаления жидкости. Однако контакт с активной областью отсутствует, так что отсутствует опасность повреждения кристалла.
В предпочтительном устройстве модуль включает в себя систему 700 встряхивателя для встряхивания рамы во время промывания. Система встряхивателя содержит двигатель 710 встряхивателя и массу 720 смещения. Встряхивающее вибрационное движение теперь маленькое по сравнению с движением инкубатора/встряхивателя. Обычно вал приводного двигателя 710 вращается с угловой скоростью 50 Гц, хотя частоту и массу можно регулировать для оптимизации эффективности промывания рамы. Можно использовать другое вибрационное средство для встряхивающей вибрационной промывки рамы, например, ультразвуки или звуковую катушку (громкоговорителя).
При завершении процесса промывки рамы двигатель 107 встряхивателя приводится в действие для отведения элемента 101 так, чтобы модуль 12 рычага захвата мог извлечь лоток 20 держателя. После извлечения лотка 20 держателя двигатель 107 встряхивателя снова приводится в действие для опускания элемента 101 в гораздо более низкое местоположение, в котором инжекторы 109 аспиратора входят в резервуар 113 для очистки, чтобы избежать загрязнения последующих образцов и операций анализа. Важный аспект этого состоит в том, что инжекторы промываются, используя отличающуюся жидкость, например чистую воду, от жидкости, подаваемой к инжекторам 108. Это предотвращает кристаллизацию из промывочной текучей среды на зондах, которая может появляться в случае известных систем.
Как можно видеть на фиг.8, зонды или инжекторы 108 соединены в группы по три для соответствующих насосов 120 (показан только один), которые, в свою очередь, подсоединены к буферному резервуару 121 промывочного раствора через соответствующие клапаны 122. Действие клапанов 122 пропускает смесь воды из резервуара 123 и промывочного раствора в соответствующий насос 120, а отсюда к соответствующим трем инжекторам 108. Резервуар 123 соединен также через насос 124, управляемый микропроцессором, для подачи чистой воды с резервуаром 113. Инжекторы 109 аспиратора соединены с насадкой 125, которая, в свою очередь, соединена через вакуумный сосуд 126, вакуумный бак 128 и вакуумный контрольный клапан 127 с вакуумным насосом 129, который приводится в действие во время отсасывания. Отсасываемая текучая среда собирается в вакуумном сосуде 126 и выпускается посредством непрерывно работающего насоса 130 к стоку 131. Сток 131 соединен также с выпускным отверстием 132 из резервуара 113.
Важный аспект показанной на фиг.8 системы состоит в использовании устройства двойной камеры для гарантирования, что жидкость, отсасываемая из ячеек хранения, улавливается в меньшем вакуумном сосуде 126 и не достигает главного вакуумного бака 128 или вакуумного насоса 129. Использование главного вакуумного блока 128 и вакуумного контрольного клапана 127 наряду с вакуумным насосом 129 позволяет получать более высокий "аспирационный импульс", чем можно было бы достигнуть с одним насосом.
Система работает следующим образом. Работа насоса 129 осуществляется под управлением микропроцессора. При запуске вакуумного насоса в меньшем вакуумном сосуде 126 давление снижается и жидкость отсасывается из ячеек хранения в вакуумный сосуд 126.
В качестве альтернативы, отдельные или группы ячеек хранения можно отсасывать по очереди посредством замены одного вакуумного контрольного клапана 127 множеством клапанов, связанных с конкретными инжекторами отсасывания, достигая тем самым дальнейшего увеличения "аспирационного импульса".
После промывания рамы далее держатель 20 перемещается главной транспортировочной системой 11 к модулю 15 сигнального реактива или обратно к модулю 18 приготовления в зависимости от того, основан ли анализ на конкурентной или чередующейся основе соответственно. В случае конкурентных анализов в ячейки хранения добавляют конъюгаты непосредственно при поступлении модуля 18 приготовления, тогда как в случае анализа на чередующейся основе вначале добавляется разбавляющий буферный раствор для анализа, инкубируется, а затем промывается перед добавлением конъюгатов, после чего инкубируется и промывается.
Затем держатель 20 перемещается главной транспортировочной системой 11 к модулю 14 формирования изображения. Однако в предпочтительном способе на ячейки хранения устанавливается крышка, прежде чем они выйдут из модуля 15 сигнального реактива или пункта 18 приготовления, чтобы предотвратить попадание света в ячейки хранения. Эта крышка потом может удаляться перед перемещением к модулю образования изображения или внутри него.
На фиг.9 показана главная транспортировочная система и модуль 16 промывки рамы с модулем 12 рычага захвата, расположенным так, чтобы подать лоток держателя к модулю промывки рамы. Фиг.9 иллюстрирует также опоры 140, 141 для лотка держателя двух других модулей, которые в остальном не показаны.
Модуль 14 формирования изображения имеет в общем обычную форму для контроля хемилюминесценции и подробно описываться не будет. Однако способ подачи лотка держателя к модулю формирования изображения для автоматического выполнения анализа и отведения от него будет описан со ссылкой на фиг.10А и 10В.
Поскольку необходимо, чтобы модуль 14 формирования изображения был светонепроницаемым, в настоящем примере на входе модуля 14 формирования изображения предусмотрена дверца 150, которая может автоматически приводиться в действие при подаче и отведении лотка держателя.
Модуль 14 формирования изображения включает в себя опору 151 лотка держателя, которая показана на фиг.10А и 10В расположенной внутри модуля формирования изображения. Опора 151 лотка держателя включает в себя пару блоков 152, определяющих обращенные друг к другу канавки 153, в которые входят ползуны 28 лотка держателя. Блок 154 несет на себе уплотнение Вола (не показанное).
Опора 151 лотка держателя смонтирована с возможностью скольжения в модуле формирования изображения для перемещения между положением, показанным на чертежах, и эквивалентным положением на другой стороне дверцы 150, в котором она может быть выравнена с модулем 12 рычага захвата. Перемещение опоры 151 лотка держателя может управляться лентой 155, идущей вокруг вспомогательного ролика 156 и ведущего ролика 157, приводимого шаговым двигателем 158 под управлением микропроцессора.
Микровыключатель на левой передней стороне опоры лотка держателя используется для выключения приводного напряжения, подаваемого на оптический эмиттерный детектор рядом с шаровым уплотнением для того, чтобы устранить излучение света во время процесса изображения.
К концу опоры 151 лотка держателя рядом с дверцей 150 прикреплено соединение 161, поворачиваемое к одному из блоков 152 и к дверце 150.
Когда опора 151 лотка держателя перемещается к дверце 150 (вправо на фиг 10В) посредством шагового двигателя 158, соединение 161 давит на дверцу 150 в направлении против часовой стрелки относительно шарнира 162, тем самым открывая отверстие 163 так, чтобы опора 151 лотка держателя вместе с лотком держателя могла переместиться через отверстие 163 к модулю 12 рычага захвата. Это перемещение вызывает поворот соединения 161 в направлении против часовой стрелки относительно его поворотного соединения с блоком 152, так что когда опора 151 лотка держателя проходит через отверстие 163, соединения 161 продолжают поворачиваться против часовой стрелки, позволяя дверце 150 закрыться позади нее. Следует понимать, что аналогичное действие выполняется, когда опора 151 лотка держателя возвращается в модуль 14 формирования изображения.
Процесс формирования изображения, осуществляемый на пункте формирования изображения, имеет обычную форму или может быть таким, как описано в документе ЕР-А-0902394.
После завершения процесса формирования изображения лоток 20 держателя возвращается обратно через отверстие 163 двигателем 158 и извлекается модулем 12 рычага захвата. Затем лоток держателя может быть перемещен в местоположение отходов (не показанное) для разгрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| СИСТЕМА ДЛЯ ИНКУБАЦИИ И ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811721C1 |
| МОДУЛЬ И СИСТЕМА ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813210C1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В КАМЕРЕ ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2812238C1 |
| МОДУЛЬ ЗАГРУЗКИ И ВЫГРУЗКИ КОНТЕЙНЕРОВ ДЛЯ КАМЕРЫ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811536C1 |
| СПОСОБ И УСТАНОВКА ДЛЯ ПОДАЧИ ДВИЖУЩИХСЯ ДЕРЖАТЕЛЕЙ ЯИЦ | 2015 |
|
RU2650547C1 |
| Автоматизированная установка для выращивания личинок мух | 2021 |
|
RU2762423C1 |
| ИНКУБАТОР | 2024 |
|
RU2840385C1 |
| СПОСОБ ОБРАБОТКИ ЯИЦ (ВАРИАНТЫ) | 2002 |
|
RU2264708C2 |
| Устройство для поштучной выдачи заготовок | 1979 |
|
SU861224A1 |
Изобретение относится к медицине и ветеринарии. Аппаратура содержит множество модулей обработки. Транспортировочная система перемещает анализирующее устройство к каждому модулю обработки, причем транспортировочная система приспособлена для перемещения анализирующего устройства от транспортировочной системы к модулю, чтобы дать возможность транспортировочной системе перемещать другое анализирующее устройство во время обработки первого модулем обработки. Система управления управляет работой транспортировочной системы так, что каждое анализирующее устройство перемещается между модулями в предварительно определенной последовательности и так, что ряд анализирующих устройств может обрабатываться в различных модулях одновременно. Технический результат состоит в обеспечении автоматизации процесса анализа. 29 з.п. ф-лы, 14 ил.
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| ЕР 0902394 A1, 17.03.1999 | |||
| US 5573727 А, 12.11.1996 | |||
| ОДНОРАЗОВАЯ СИСТЕМА РАЗМЕЩЕНИЯ РЕАКЦИОННЫХ ЕМКОСТЕЙ (ВАРИАНТЫ) | 1994 |
|
RU2106007C1 |
