Область техники, к которой относится изобретение
Изобретение относится к лабораторному оборудованию для проведения микробиологических исследований, а именно к устройствам, позволяющим проводить загрузку и выгрузку контейнеров с биологическими образцами в/из камеры инкубации биологических образцов. Заявленный модуль загрузки и выгрузки контейнеров с биологическими образцами может быть использован в автоматизированных микробиологических лабораториях и системах, позволяющих проводить инкубирование микроорганизмов и клеточных структур, размещенных в контейнерах, например, в чашках Петри, с последующим исследованием результатов посева, включая регистрацию роста колоний в режиме реального времени, идентификацию микробного агента в образце, определение его резистентности к антибактериальным препаратам и т.д.
Уровень техники
В настоящее время наблюдается активное развитие микробиологической отрасли, одной из задач которой является внедрение автоматизированных систем и оборудования для инкубации микроорганизмов и клеточных структур и проведения микробиологических исследований. С ростом количества проводимых микробиологических исследований актуальным является разработка высокопроизводительных систем, повышение скорости проведения исследования с одновременным обеспечением высокого качества получаемого результата, исключение ошибок, вызванных человеческим фактором, а также повышение общей эффективности лабораторной службы. Одна из задач автоматизации микробиологических исследований связана с разработкой модулей и блоков системы инкубации, способных полностью или частично исключить медицинский персонал лаборатории из деятельности по доставке контейнеров с биологическими образцами в зону инкубации, а также из нее - в зону выгрузки.
Модули загрузки и выгрузки контейнеров с биологическими образцами, как правило, в составе автоматизированных систем используются совместно с камерами инкубации. Камера инкубации представляет собой изолированный бокс, снабженный средствами контроля параметров среды, формируемой в рабочем объеме камеры для роста микроорганизмов, оснащена ячейками для размещения контейнеров с образцами, блоком перемещения контейнеров в рабочем объеме камеры инкубации в виде трехкоординатного манипулятора с поворотным захватом для контейнеров, и блоком оптической или цифровой визуализации образцов в процессе инкубации, например, на наличие микробного роста. Для низкопроизводительных систем модуль загрузки и выгрузки контейнеров с биологическими образцами может быть выполнен в виде двух транспортеров, по одному из которых осуществляется подача контейнеров на инкубацию, по второму - выдача контейнеров после завершения процесса инкубации. При этом установка контейнеров на транспортеры производится поштучно в ручном режиме. Однако, при увеличении загрузочного объема камеры инкубации до 300 контейнеров и более, необходимо усовершенствование модуля загрузки и выгрузки контейнеров с образцами с целью обеспечения автоматического обслуживания системы в потоковом режиме контейнеров, направляемых в камеру инкубации и выгружаемых из камеры после завершения процесса инкубации биологических образцов. Большинство известных из уровня техники модулей загрузки и выгрузки контейнеров в силу своих конструктивных особенностей ограничивают производительность системы инкубации в условиях повышенного потока контейнеров.
Из уровня техники известны модули загрузки и выгрузки контейнеров, используемые в составе автоматизированных модульных микробиологических систем, например, таких как WASPLab (производитель - COPAN), и Kiestra ReadA (производитель - BD).
Модуль загрузки и выгрузки контейнеров микробиологической системы WASPLab компании COPAN (официальный сайт компании COPAN // URL: https://www.copanusa.com/full-lab-automation-and-artificial-intelligence/wasplab/, дата обращения: 28.07.2023) включает конвейер для транспортировки чашек в камеру инкубации, модуль выгрузки чашек в съемные контейнеры после инкубации для их дальнейшей обработки и проверки персоналом лаборатории. Однако используемый модуль загрузки и выгрузки не позволяет обеспечить высокоинтенсивный уровень обслуживания поступающих чашек, что снижает производительность системы инкубирования образцов при использовании инкубатора высокой вместимости.
Из текущего уровня техники известен модуль загрузки и выгрузки контейнеров с биологическими образцами, используемый в составе микробиологической лаборатории (системе) BD Kiestra™ ReadA™ (US11041871 B2, дата публикации: 22.06.2021, а также представленная на официальном сайте компании - правообладателя BD // URL: https://www.bd.com/en-us/products-and-solutions/products/product-families/bd-kiestra-reada, дата обращения: 28.07.2023), и являющийся ближайшим аналогом заявленного технического решения. Данная система содержит камеру инкубации образцов, которая снабжена трехкоординатным манипулятором, перемещающим контейнеры в рабочем объеме камеры, окнами для загрузки и выгрузки контейнеров с образцами, расположенными на одной из стенок камеры, полками с ячейками - гнездами для размещения контейнеров, средствами формирования в рабочем объеме камеры требуемого температурного режима и атмосферы. В указанной системе модуль загрузки/выгрузки содержит блок, расположенный за пределами рабочего объема камеры инкубации. Модуль загрузки/выгрузки содержит лотки загрузки и лотки выгрузки контейнеров, сформированные на поверхности стола, транспортер (конвейер) для перемещения контейнеров из лотков загрузки в камеру инкубации, транспортер (конвейер) для перемещения контейнеров из камеры инкубации в лотки выгрузки, при этом транспортеры (конвейеры) расположены на одной высоте и выполнены с возможностью перемещения во встречных направлениях, снабжены сканерами, выполненными с возможностью считывания размещенной на контейнерах информации, поворотными створками, направляющими контейнер с транспортера загрузки к входному окну камеры инкубации и от выходного окна камеры инкубации к транспортеру выгрузки, пневматические средства перемещения контейнеров в вертикальном направлении, выполненные в виде лифтов. В указанной системе модуль загрузки/выгрузки также содержит блок, расположенный в рабочем объеме камеры инкубации, который включает два транспортера, передающих контейнеры в рабочую зону трехкоординатного манипулятора. Один из транспортеров предназначен для загружаемого в камеру контейнера, второй - для выгружаемого контейнера из камеры инкубации.
В известной конструкции модуля загрузки и выгрузки контейнеров между соседними лотками загрузки размещена поворотная створка, выполненная с возможностью поворота вокруг вертикальной оси на угол 45 градусов в противоположных направлениях, поочередно перекрывая выход контейнеров на транспортер загрузки из соседних лотков. Однако данная створка при повороте не в полной мере фиксирует стопки контейнеров в лотке загрузки, вследствие чего возможно рассыпание стопок и повреждение контейнеров с образцами. Кроме того, подача чашек из лотков загрузки на транспортер загрузки осуществляется благодаря толкателям, движущимся поступательно. Толкатели выполнены в виде пластин с вертикальными штырями, которые приводятся в движение пневматическими приводами. Недостатком такой реализации является постоянная скорость перемещения толкателей, без возможности ее изменения для обеспечения плавного перемещения контейнера, что увеличивает риск его повреждения в процессе перемещения из лотка загрузки на транспортер загрузки. Кроме того, лотки выгрузки выполнены из отсеков, разделенных перегородками, закрепленных на столе с зазором друг относительно друга, что создает неудобство при обслуживании, не обеспечивает их мобильность, а наличие зазоров увеличивает габариты модуля. Стопки контейнеров выгружаются непосредственно на стол, из-за чего лаборанту приходится брать стопки по одной, а также визуально контролировать заполнение лотка. Кроме того, выполнение приводов лифтов и толкателей пневматическими требует дополнительного подвода сжатого воздуха к устройству, что накладывает определенные ограничения при эксплуатации оборудования, связанные с необходимостью поддержания чистоты окружающего воздуха. Использование пневматических приводов затрудняет возможность плавного изменения скорости перемещения подвижных частей, взаимодействующих с контейнером, т.е. плавного перемещения контейнера там, где это необходимо, повышая риск повреждения контейнеров и инкубируемых биологических образцов. В совокупности указанные особенности прототипа значительно усложняют процесс загрузки и выгрузки контейнеров, отрицательно влияют на производительность и эффективность автоматизированных микробиологических систем при высоком потоке инкубируемых биологических образцов.
Технической проблемой, решение которой обеспечивается при осуществлении/использовании настоящего изобретения, является разработка компактного модуля загрузки и выгрузки контейнеров для высокопроизводительной камеры инкубации, который устраняет недостатки аналогов и прототипа, способен обеспечить подачу контейнеров из лотков загрузки в камеру инкубации и перемещение контейнеров из камеры инкубации в лотки выгрузки в потоковом режиме с минимальным риском повреждения контейнеров и размещенных в них биологических образцов и минимальным участием обслуживающего персонала.
Раскрытие сущности изобретения
Технический результат, обеспечиваемый изобретением при решении вышеуказанной технической проблемы, заключается в снижении габаритных размеров модуля загрузки и выгрузки контейнеров и, вместе с тем, в повышении удобства и скорости обслуживания контейнеров в потоковом режиме в процессе их загрузки и выгрузки в/из камеры инкубации, способствуя тем самым, повышению производительности камеры инкубации, при снижении риска повреждений контейнеров с образцами в процессе загрузки и выгрузки, а также ошибок, вызванных человеческим фактором.
Технический результат достигается за счет использования усовершенствованного модуля загрузки и выгрузки контейнеров в камеру/из камеры инкубации, содержащего внешний блок - расположенный с внешней стороны от камеры инкубации, включающий транспортер загрузки контейнеров в камеру инкубации, предназначенный для перемещения контейнеров из лотка загрузки в камеру инкубации, и транспортер выгрузки контейнеров, предназначенный для перемещения контейнеров из камеры инкубации в лоток выгрузки; по меньшей мере, один лоток загрузки контейнеров; по меньшей мере, два лотка выгрузки контейнеров, каждый из которых снабжен приемной ячейкой, расположенной над транспортером выгрузки, при этом приемная ячейка снабжена средством вертикального перемещения контейнера в виде лифта, стопорами, выполненными с возможностью остановки контейнера на транспортере, средством формирования стопки контейнеров, средством перемещения сформированной стопки контейнеров в лоток выгрузки; средства перемещения контейнеров из лотка загрузки на транспортер загрузки; набор датчиков.
Отличительными особенностями модуля загрузки и выгрузки контейнеров является выполнение внешнего блока с приемным боксом, расположенным над транспортером выгрузки контейнеров, при этом приемные ячейки в боксе образованы его поперечными перегородками, стопоры приемной ячейки закреплены на площадке лифта, а транспортер загрузки и транспортер выгрузки расположены на разных уровнях по высоте с обеспечением возможности размещения привода средства перемещения сформированной стопки контейнеров из приемной ячейки в лоток выгрузки под транспортером загрузки.
Транспортеры загрузки и выгрузки контейнеров выполнены с возможностью перемещения во встречных направлениях, оснащены независимыми электроприводами, стопорами для остановки контейнера на транспортере в заданном пространственном положении, и оптическими датчиками наличия контейнеров. Стопоры выполнены в виде выдвижных штифтов, приводимых в движение электромагнитным приводом. Транспортеры снабжены поворотными створками, выполненными с возможностью изменения траектории перемещения контейнера при повороте створки.
Лоток загрузки и лоток выгрузки контейнеров предпочтительно расположены на одной рабочей поверхности. Лоток загрузки может быть выполнен съемным или с возможностью размещения в нем съемной переносной кассеты для приема контейнеров с образцами и перемещения сформированной стопки контейнеров средством перемещения из приемной ячейки непосредственно в кассету, при этом лоток оснащен датчиком наличия кассеты и датчиком заполнения кассеты. Лоток загрузки в одном из вариантов реализации изобретения снабжен торцевой стенкой, закрепленной со стороны транспортера загрузки, при этом торцевая стенка расположена с отступом от основания с образованием щели для перемещения через нее на транспортер нижнего контейнера из стопки. Лоток загрузки может быть оснащен оптическими датчиками наличия контейнеров, расположенными со стороны входа и выхода лотка.
Лоток загрузки оснащен средством поочередной выдачи контейнеров из лотков загрузки на транспортер загрузки, который может иметь различные варианты исполнения. В одном из вариантов данное средство выполнено в виде цепного транспортера с двумя парами захватов, где одна пара захватов предназначена для выталкивания контейнера на транспортер загрузки, а вторая - для фиксации контейнера из следующей стопки с целью предотвращения преждевременной выдачи на транспортер. В другом варианте реализации данное средство выполнено в виде толкателя, представляющего собой прямоугольную пластину, закрепленную под основанием лотка загрузки с возможностью возвратно-поступательного перемещения, и снабженную вертикальными штырями, расположенными с возможностью выталкивания контейнера из лотка на транспортер загрузки, при этом основание контейнера снабжено продольными пазами или прорезями в проекции перемещения штырей толкателя. Кроме того, лоток загрузки может быть оснащен поворотным барабаном, выполненным в виде полуцилиндра с возможностью изменения положения при повороте на 180° градусов, при этом одно из положений барабана, при котором его внешняя выпуклая поверхность ориентирована на транспортер загрузки, предназначено для приема стопки контейнеров, а другое положение барабана - при повороте на 180 градусов - выполняет функцию разделительной перегородки между размещенной в нем стопкой и соседней стопкой контейнеров (между соседними стопками контпейнеров).
Приемные ячейки контейнеров приемного бокса могут иметь различные варианты выполнения. Приемные ячейки снабжены поворотными створками, пропускающими контейнер при перемещении его лифтом в приемную ячейку и блокирующие обратное перемещение контейнера. Поворотные створки приемной ячейки представляют собой пластины, закрепленные на противоположных стенках приемной ячейки с возможностью поворота вокруг горизонтальной оси пластины на угол 90 градусов, при этом в исходном положении - без контейнера - створки расположены в горизонтальной плоскости над транспортером, и имеют конфигурацию, обеспечивающую формирование «окна», размер которого меньше диаметра контейнера и больше диаметра площадки лифта, на котором он расположен, с обеспечением перемещения через упомянутое окно контейнера из нижнего положения в верхнее с помощью лифта, при этом створки «открываются» при их повороте из горизонтального положения в верхнее вертикальное положение при воздействии на них стенками контейнера, и после достижения контейнером заданной высоты, при которой створки «закрываются», занимая исходное горизонтальное положение, формируя, тем самым, опорную площадку, на которой размещается контейнер при перемещении лифта из крайне верхнего положения в крайнее нижнее положение.
Лифт приемной ячейки снабжен датчиком наличия контейнера, расположенным между стопорами. Средство перемещения сформированной стопки контейнеров из приемной ячейки в лоток выгрузки представляет собой вертикально расположенные пластину или шибер с профилем, близким к профилю контейнера, выполненные с возможностью возвратно-поступательного перемещения в горизонтальной плоскости приемной ячейки.
Модуль загрузки и выгрузки контейнеров в камеру/из камеры инкубации, наряду с внешним блоком, расположенным с внешней стороны от камеры инкубации, может содержать внутренний блок, распложенный в рабочем объеме камеры инкубации, выполненный с возможностью сопряжения с блоком, расположенным с внешней стороны камеры инкубации через окно для загрузки и выгрузки контейнеров. В одном из вариантов реализации изобретения внутренний блок содержит две площадки для размещения контейнеров, или два транспортера, расположенные в проекции окна камеры инкубации, один из которых предназначен для загружаемого в камеру контейнера, второй - для выгружаемого контейнера из камеры инкубации, при этом площадки или транспортеры снабжены средствами вертикального перемещения контейнеров, выполненными в виде лифта, и соединены с соответствующими транспортерами для загрузки или выгрузки контейнеров, расположенными с внешней стороны камеры инкубации.
Предпочтительно все приводы в модуле загрузки и выгрузки контейнеров выполнены электромеханическими.
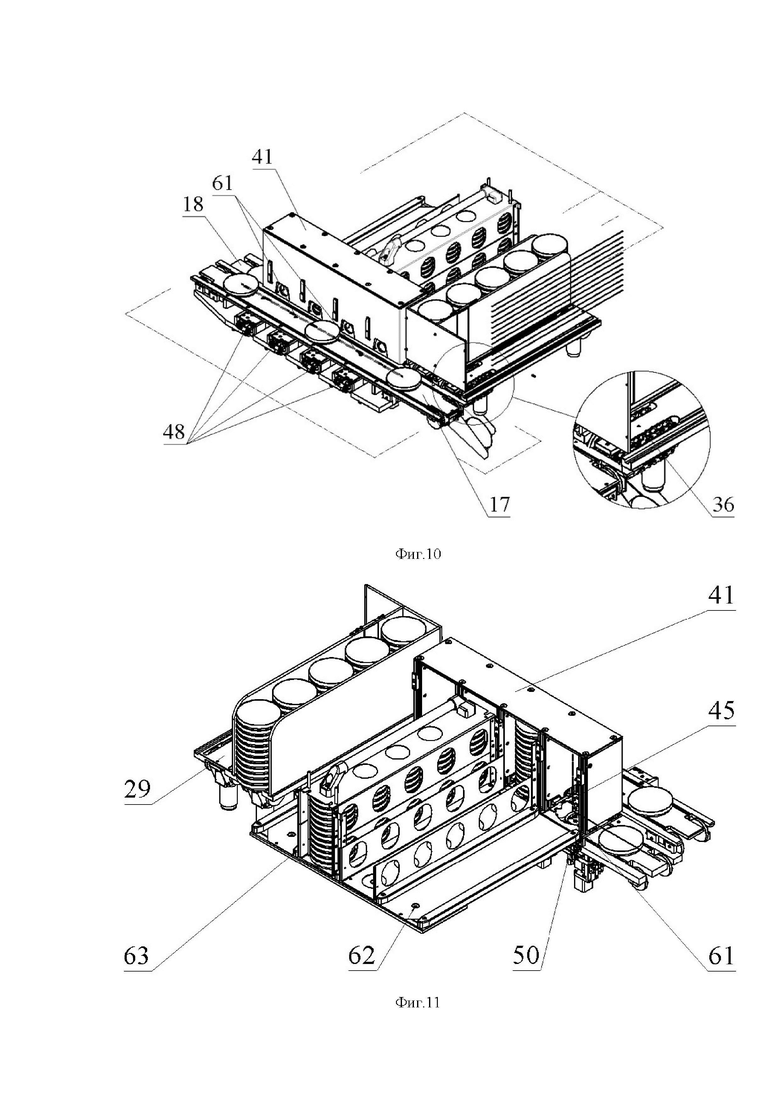
Снижение габаритных размеров модуля загрузки и выгрузки достигается за счет выполнения в виде одного блока узла загрузки контейнеров на транспортер загрузки и узла выгрузки контейнеров с транспортера выгрузки в соответствующие лотки. Узлы загрузки и выгрузки контейнеров содержат лотки загрузки и выгрузки, расположенные на одной рабочей поверхности стола, при этом лотки выгрузки снабжены боксом с приемными ячейками, образованными поперечными перегородками. При таком выполнении узла выгрузки контейнеров поперечная перегородка выполняет функцию боковой стенки для двух смежных ячеек бокса выгрузки, позволяет экономить площадь рабочей поверхности, занимаемой данным узлом, в отличие от прототипа, где приемные ячейки узла выгрузки представляют собой самостоятельные боксы, расположенные на определенном расстоянии друг от друга над поверхностью транспортера выгрузки. Двухуровневое размещение транспортера загрузки и транспортера выгрузки уменьшает площадь рабочей поверхности, занимаемой узлом загрузки и выгрузки. Такое расположение транспортеров позволяет разместить приводы горизонтальных толкателей лотков выгрузки под транспортером загрузки (как показано на фиг. 10).
Выполнение лотков загрузки и выгрузки съемными или с возможностью размещения в них съемных переносных кассет в совокупности с используемыми датчиками, размещенными на конструктивных элементах модуля загрузки и выгрузки, включая датчики наличия и заполнения кассет, в которые выгружаются и штабелируются стопки контейнеров, повышают скорость и удобство обслуживания устройства в процессе его работы, не требует контроля процесса выгрузки контейнеров со стороны оператора.
Конструкция модуля характеризуется повышенной эксплуатационной надежностью, достигаемой, в том числе за счет исключения механизмов перемещения стопоров в узле выгрузки. В заявленном решении стопоры размещены на площадке лифта, что обеспечило возможность их перемещения с помощью одного привода. Таким образом, на каждый лоток выгрузки (а их может быть от 4 и более) используется на 1 привод меньше в отличие от устройства, выбранного в качестве прототипа. Кроме того, повышенная эксплуатационная надежность заявленного модуля связана с использованием для всех подвижных частей устройства электрических приводов, в отличие от пневматических, которые использованы в прототипе.
Таким образом, заявленное устройство является надежным, эргономичным, удобным в использовании и обслуживании, снижает вероятность ошибок оператора или лаборанта, которые могут привести к потере или порче образцов. Такие ошибки потенциально могут негативно сказываться на качестве диагностики и эффективности лечения пациентов.
Заявленная система имеет модульную конструкцию, может быть легко интегрирована в автоматизированную лабораторную среду и входить в комплекс (систему) взаимосвязанных модулей по автоматизации большей части процессов микробиологических исследований.
Краткое описание чертежей
Изобретение поясняется иллюстративным материалом.
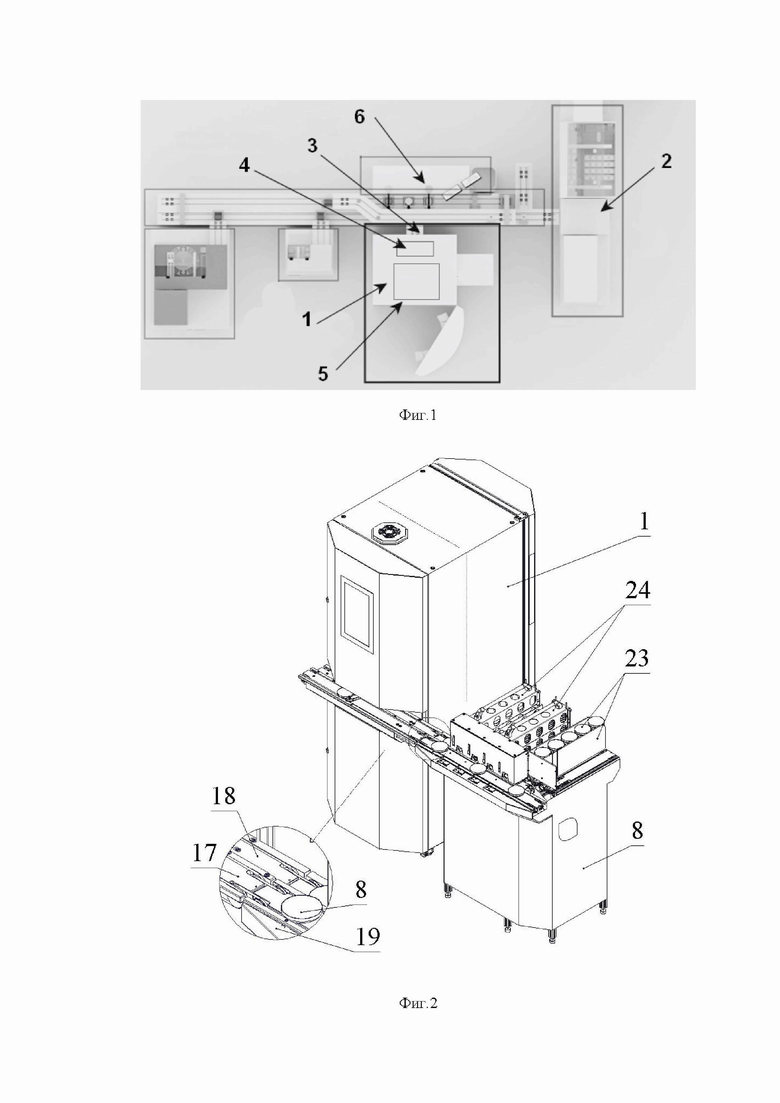
На фигуре 1 схематично представлена автоматизированная микробиологическая лаборатория, содержащая систему для инкубации и формирования цифровых изображений биологических образцов с заявленным модулем загрузки и выгрузки контейнеров. Система включает также камеру инкубации с расположенными внутри нее модулем перемещения контейнеров в рабочем объеме камеры (трехкоординатный манипулятор) и модулем формирования цифрового изображения образцов (модуль фотографирования), модуль идентификации образца (модуль сканирования), модуль посева биоматериала в контейнеры, конвейерную систему, рабочее место лаборанта с ПК для проведения исследований биологических образцов, например, на резистентность к антибиотикам и т.д.
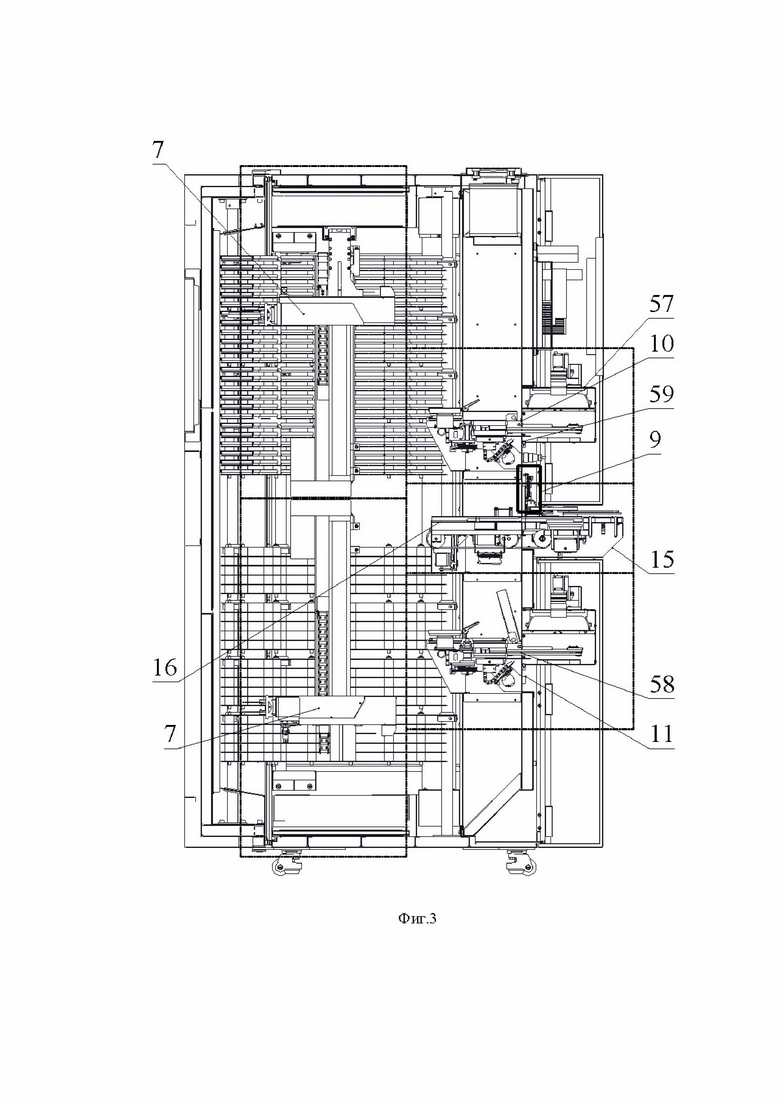
На фигуре 2 представлено изображение камеры инкубации с внешним блоком модуля загрузки и выгрузки контейнеров с образцами, общий вид со стороны передней стенки камеры, в которой расположено окно загрузки и выгрузки контейнеров; показана внешняя конфигурация камеры инкубации и взаиморасположение камеры инкубации и внешнего блока модуля загрузки и выгрузки контейнеров с образцами (блока модуля, расположенного за пределами камеры инкубации), вариант их исполнения и область стыковки;
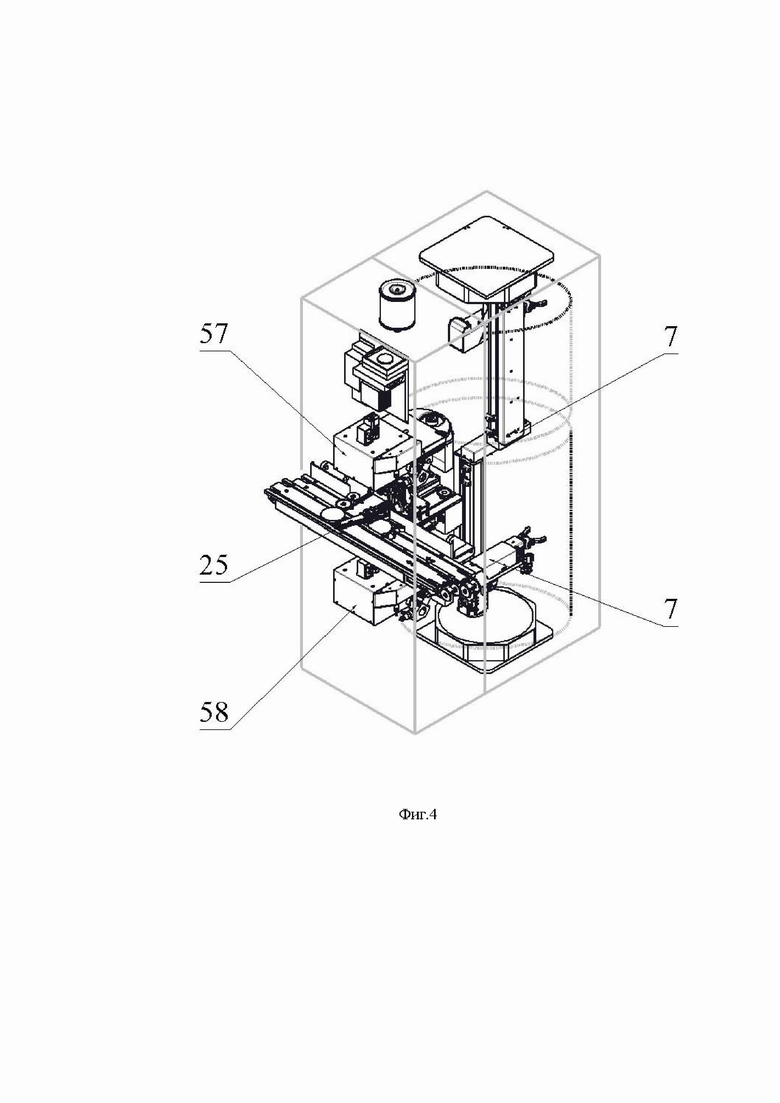
На фигуре 3 представлена камера инкубации - вид изнутри, со стороны боковой стенки; показано внутреннее устройство камеры инкубации, включая встроенные в нее элементы модуля загрузки и выгрузки контейнеров с образцами (внутреннего блока модуля, расположенного в камере инкубации, включая площадки для размещения контейнеров) и модуля перемещения контейнеров в рабочем объеме камеры (трехкоординатные манипуляторы);
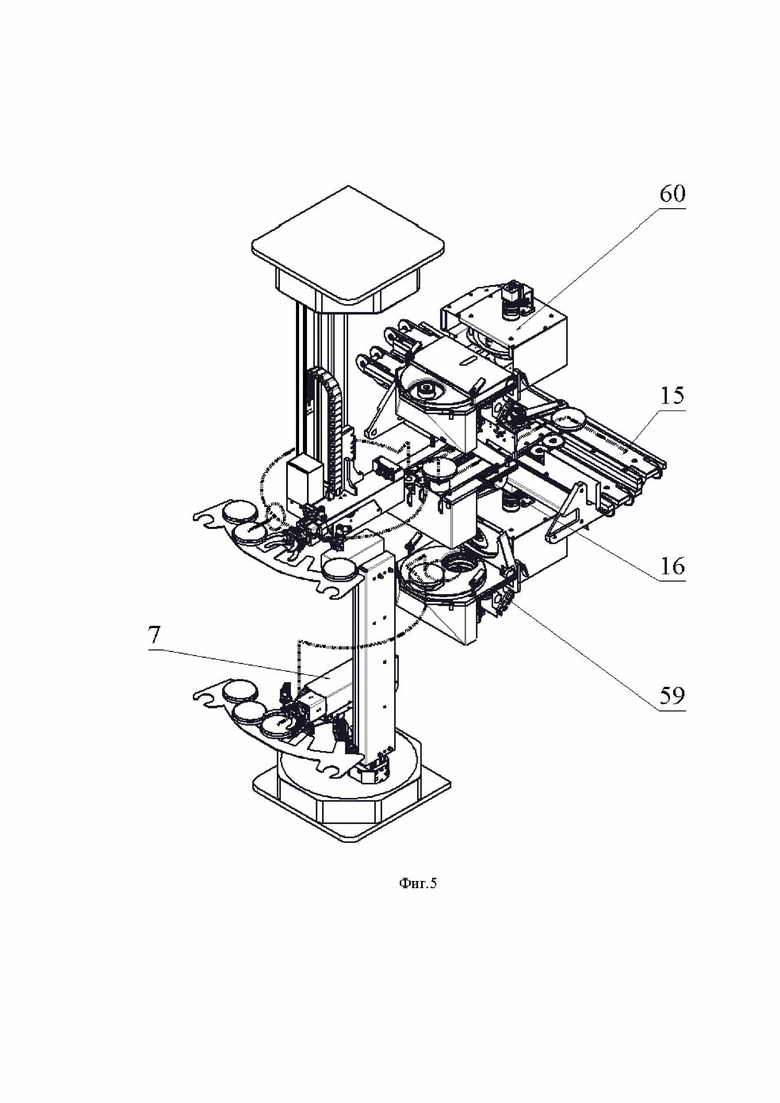
На фигуре 4 представлено конструктивное решение расположенных в камере инкубации модулей, общий вид со стороны передней стенки с условно обозначенными стенками камеры; показаны отдельные конструктивные элементы модуля загрузки и выгрузки контейнеров с образцами внутреннего блока, транспортеры для загрузки и выгрузки контейнеров внешнего блока; показано взаимное расположение транспортеров загрузки и выгрузки контейнеров относительно расположенных в камере инкубации модуля формирования цифрового изображения образцов (модуль фотографирования) и модуля перемещения контейнеров в рабочем объеме камеры (трехкоординатных манипуляторов);
На фигуре 5 показано взаимное расположение транспортеров загрузки и выгрузки контейнеров относительно других блоков и модулей камеры инкубации со стороны ее задней стенки (стенки камеры инкубации на чертеже не показаны); отражена конструктивная связь элементов, а также схема перемещения контейнера с образцом с транспортера загрузки внешнего блока загрузки и выгрузки на транспортер загрузки внутреннего блока загрузки и выгрузки контейнеров заявленного модуля;
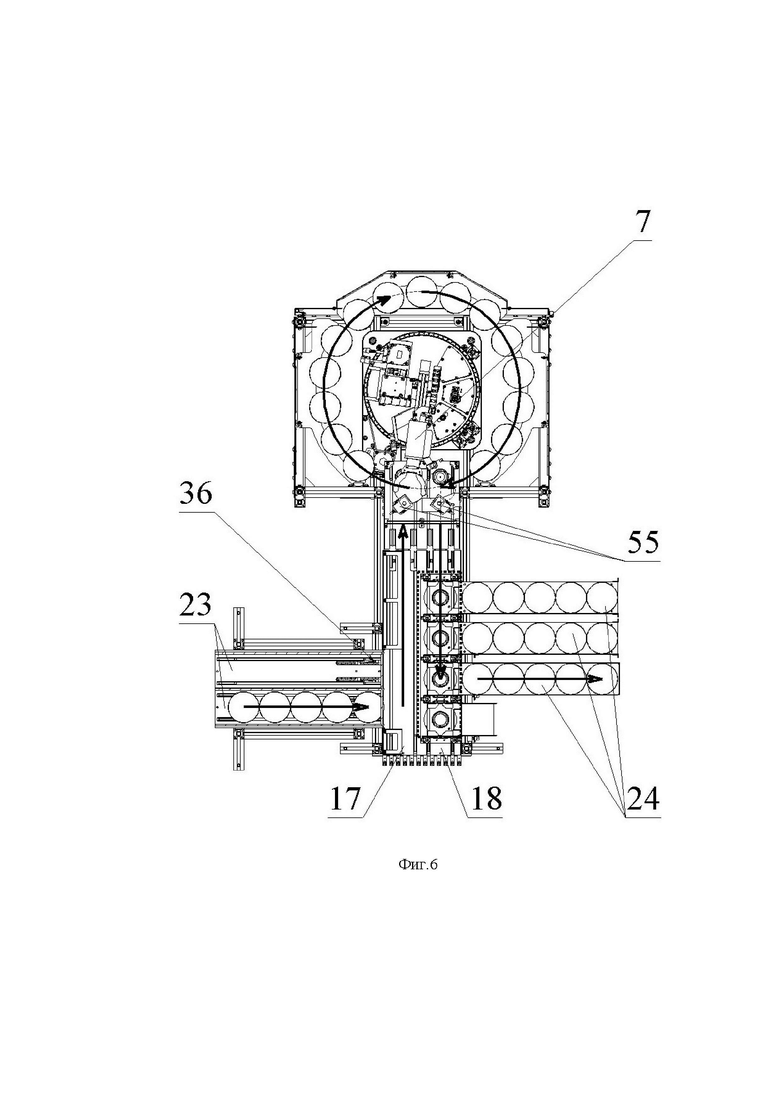
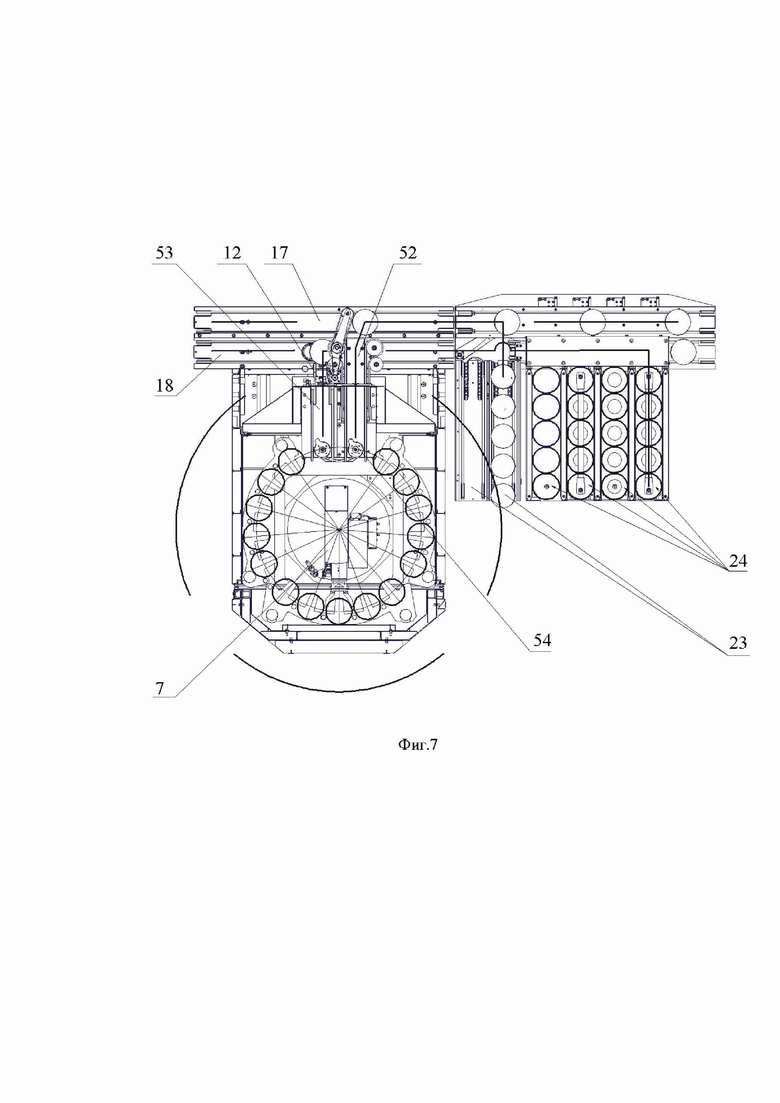
На фигурах 6 и 7 представлена камера инкубации с модулем загрузки и выгрузки контейнеров - вид сверху; показаны возможные варианты размещения транспортеров внешнего блока модуля загрузки и выгрузки контейнеров с образцами относительно камеры инкубации и порядок перемещения контейнеров с образцами, включая направление движения контейнеров с образцами по транспортеру для загрузки контейнеров в камеру инкубации и по транспортеру для выгрузки контейнеров из камеры инкубации, показана траектория движения 3-х координатного манипулятора в рабочем объеме камеры в горизонтальной плоскости камеры.
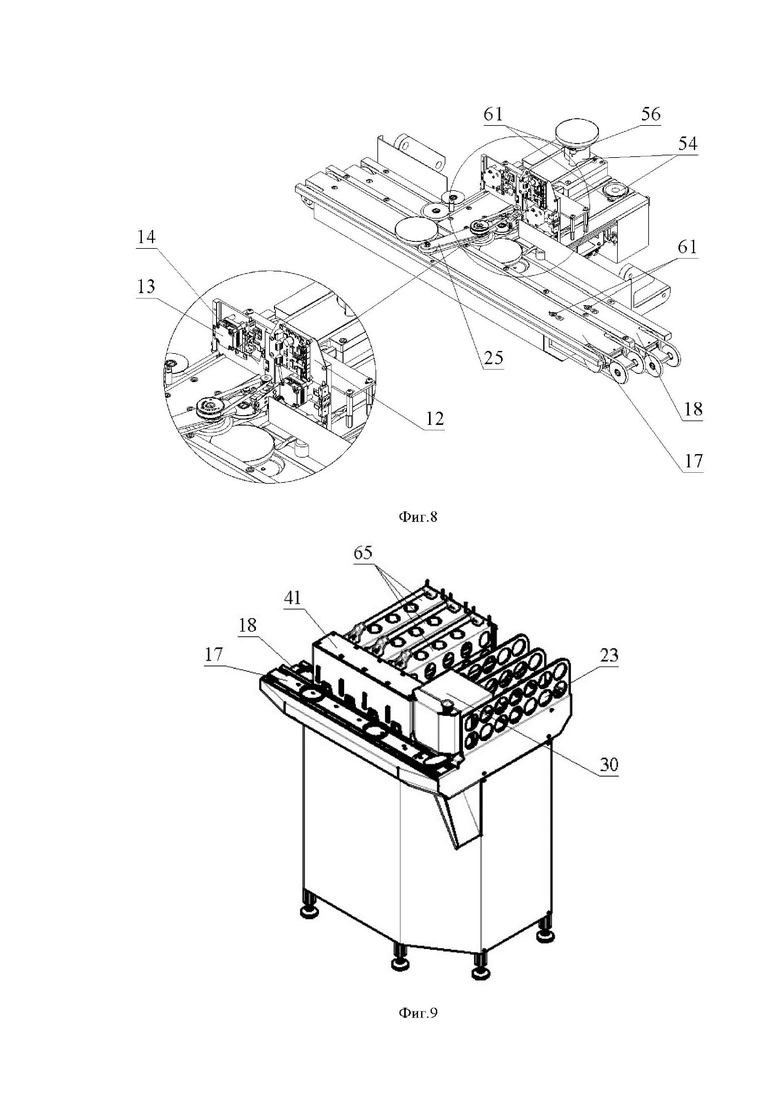
На фигуре 8 представлена детализация внешнего блока модуля загрузки и выгрузки контейнеров с образцами в области сопряжения с камерой инкубации, общий вид со стороны размещения транспортеров; показаны транспортер загрузки контейнеров в камеру инкубации, шлюз, содержащий створку с приводом, поворотная створка, направляющая контейнер от транспортера к шлюзу.
На фигуре 9 представлен общий вид внешнего блока модуля загрузки и выгрузки контейнеров; показана схема размещения лотков загрузки и лотков выгрузки на столе, бокса выгрузки и транспортеров загрузки и выгрузки.
На фигурах 10, 11 представлен общий вид на систему лотков для загрузки и лотков для выгрузки контейнеров внешнего блока модуля загрузки и выгрузки контейнеров с образцами, виды сзади и спереди, соответственно.
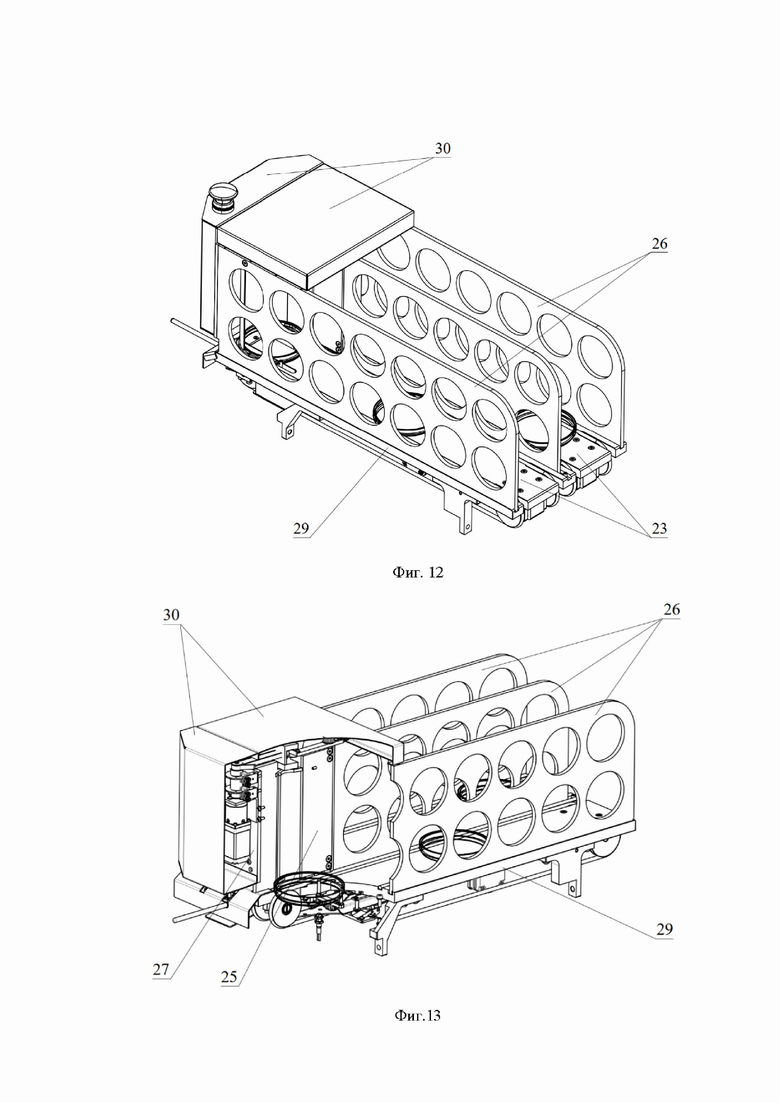
На фигурах 12 и 13 представлено изображение лотка для загрузки контейнеров, общий вид со стороны входа лотка, со стороны выхода лотка (со стороны транспортера загрузки), соответственно.
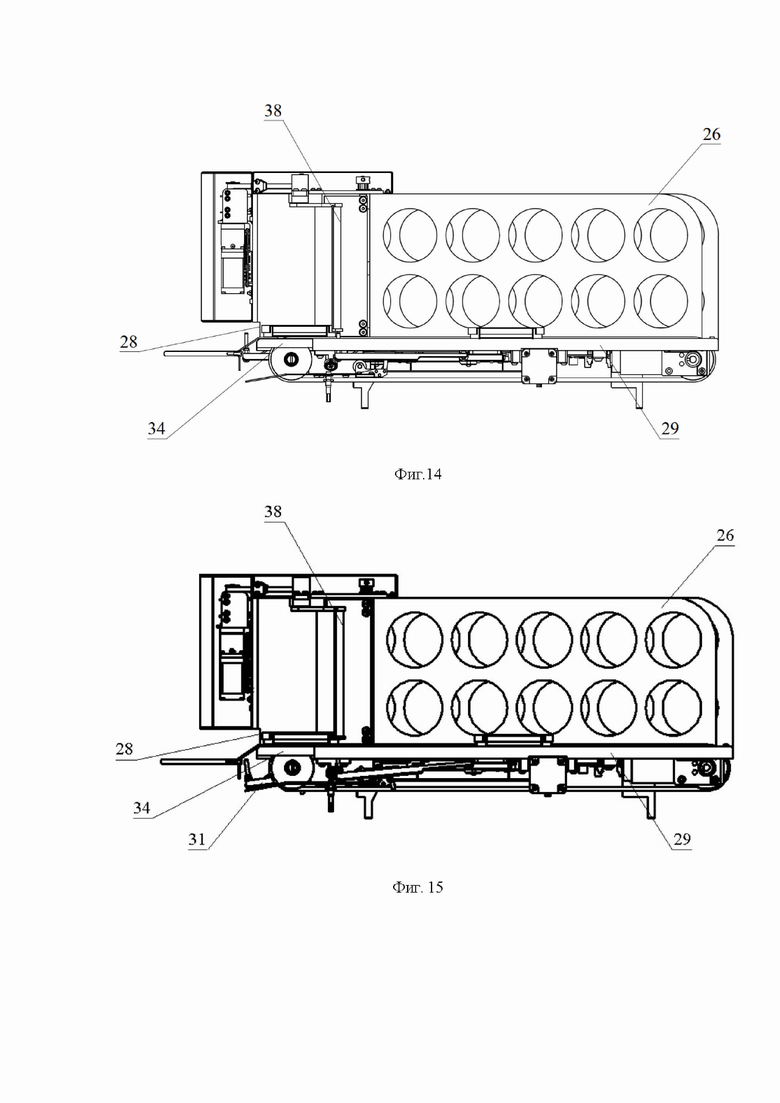
На фигурах 14 и 15 представлено изображение лотка для загрузки контейнеров, вид сбоку, демонстрирующее два положения средства выталкивания контейнера из лотка на транспортер загрузки.
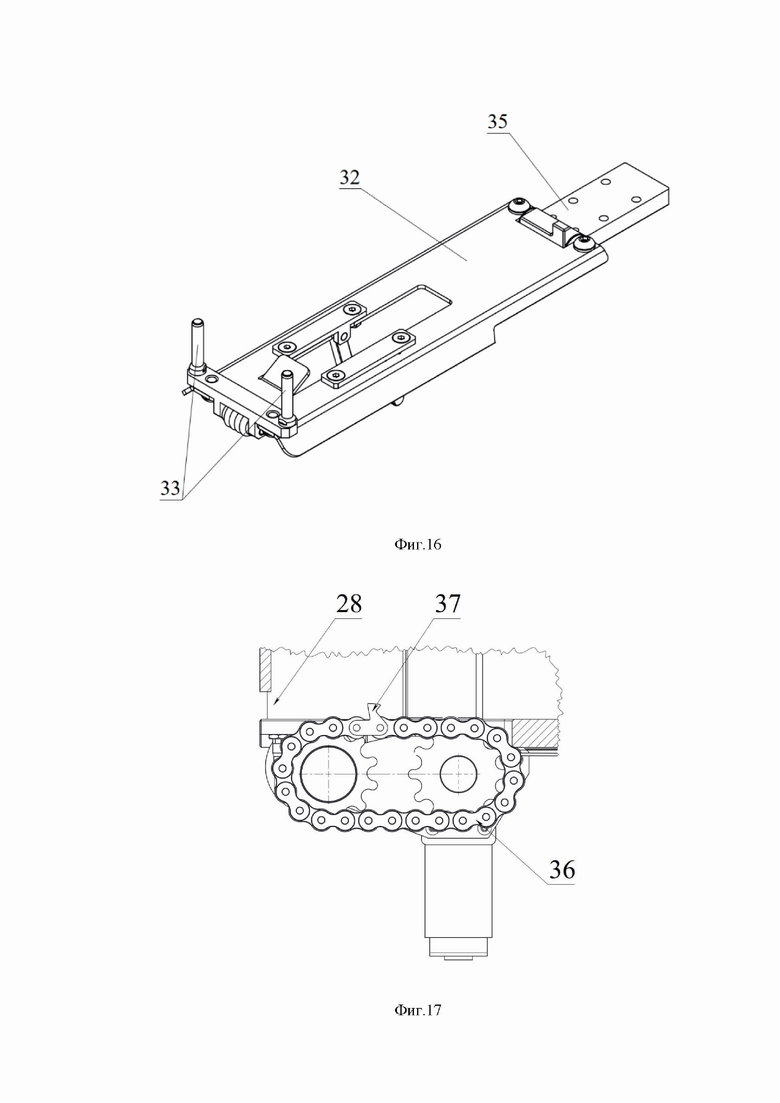
На фигуре 16 представлен общий вид пластины средства выталкивания контейнера из лотка загрузки на транспортер загрузки, размещаемой под основанием лотка загрузки контейнеров.
На фигуре 17 представлен детальный вид цепного транспортера (вариант исполнения средства выталкивания контейнера) лотка загрузки, внешнего блока модуля загрузки и выгрузки контейнеров с образцами; цепной транспортер обеспечивает поочередную подачу контейнеров из стопки на транспортер загрузки. Фрагмент цепного транспортера лотка загрузки представлен также на фиг 10.
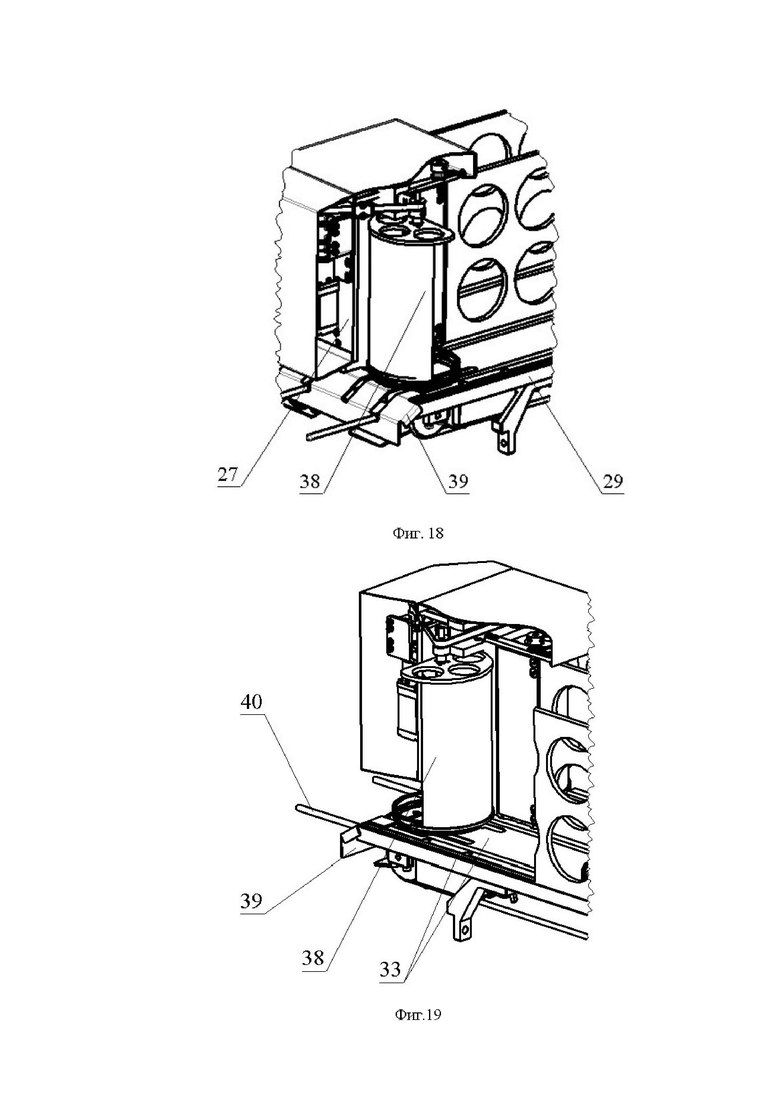
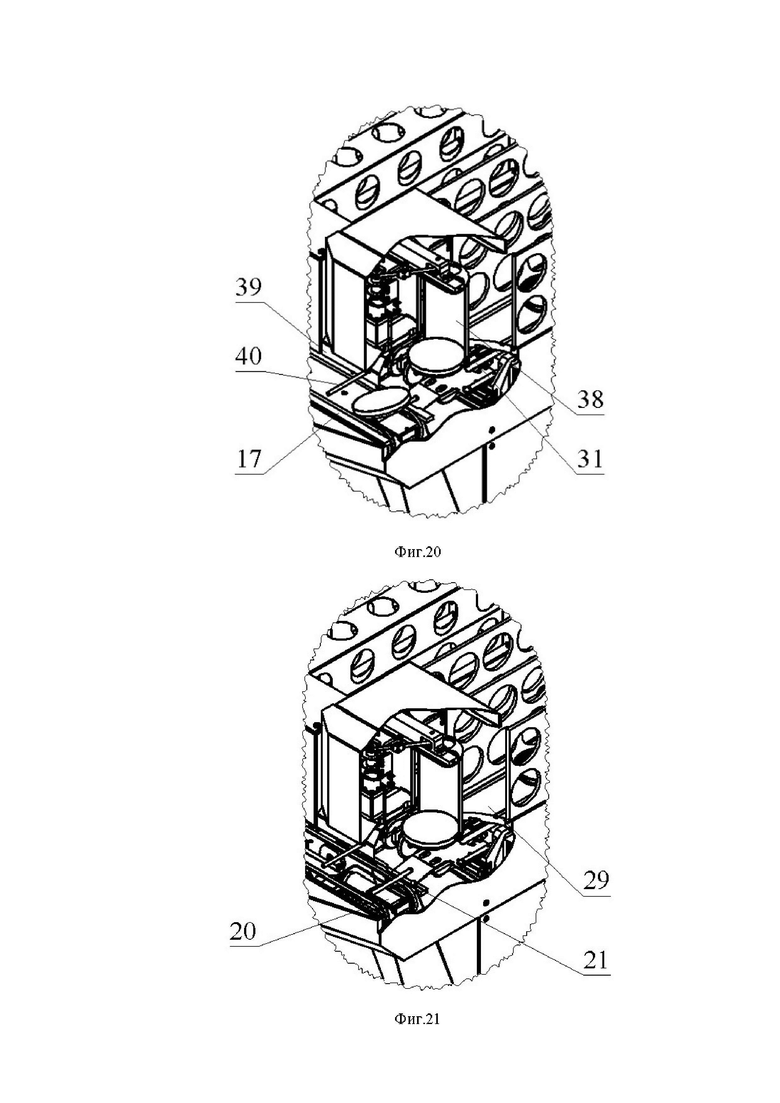
На фигурах 18 и 19 показан вариант выполнения поворотного барабана, размещаемого на выходе из лотка загрузки при приеме стопки контейнеров с расположением внутренней поверхности барабана в направлении ко входу лотка загрузки, и с расположением внутренней поверхности барабана в направлении к транспортеру загрузки, соответственно.
На фигурах 20 и 21 показан узел сопряжения лотка загрузки с транспортером загрузки, демонстрирующий схему перемещения контейнеров из лотка на транспортер.
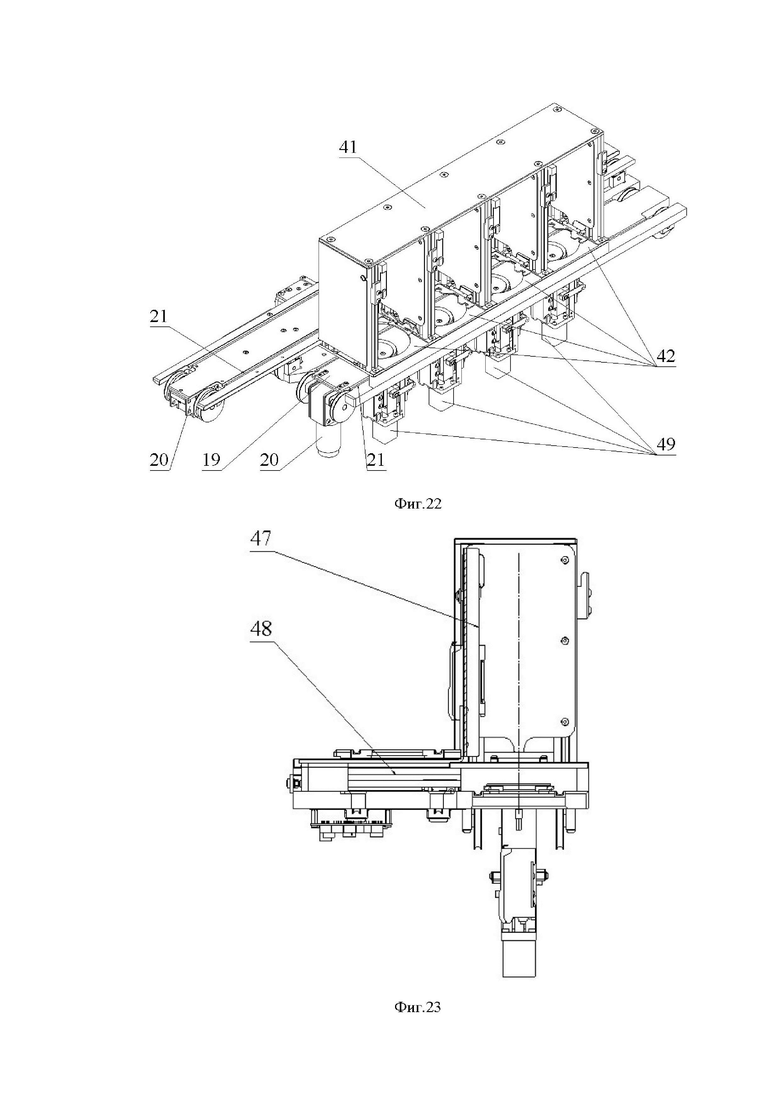
На фигуре 22 представлена детализация узла перемещения контейнеров с транспортера выгрузки в лотки выгрузки, а именно, внешнего блока модуля загрузки и выгрузки контейнеров с образцами. Показаны транспортер выгрузки контейнеров, бокс выгрузки, состоящий из ячеек (или отсеков), средства вертикального перемещения контейнеров (лифты), расположенные под каждой из ячеек бокса выгрузки. Количество ячеек бокса выгрузки соответствует количеству лотков выгрузки. Представлен общий вид упомянутого узла со стороны размещения лотков выгрузки.
На фигуре 23 представлен разрез фигуры 22, демонстрирующий размещение бокса выгрузки по отношению к транспортерам загрузки и выгрузки, а также размещение горизонтального толкателя в соответствующей ячейке бокса выгрузки. Разрез фигуры 22 представлен по плоскости, проходящей через вертикальную ось одной из ячеек бокса выгрузки и перпендикулярной направлению движения контейнеров по транспортеру.
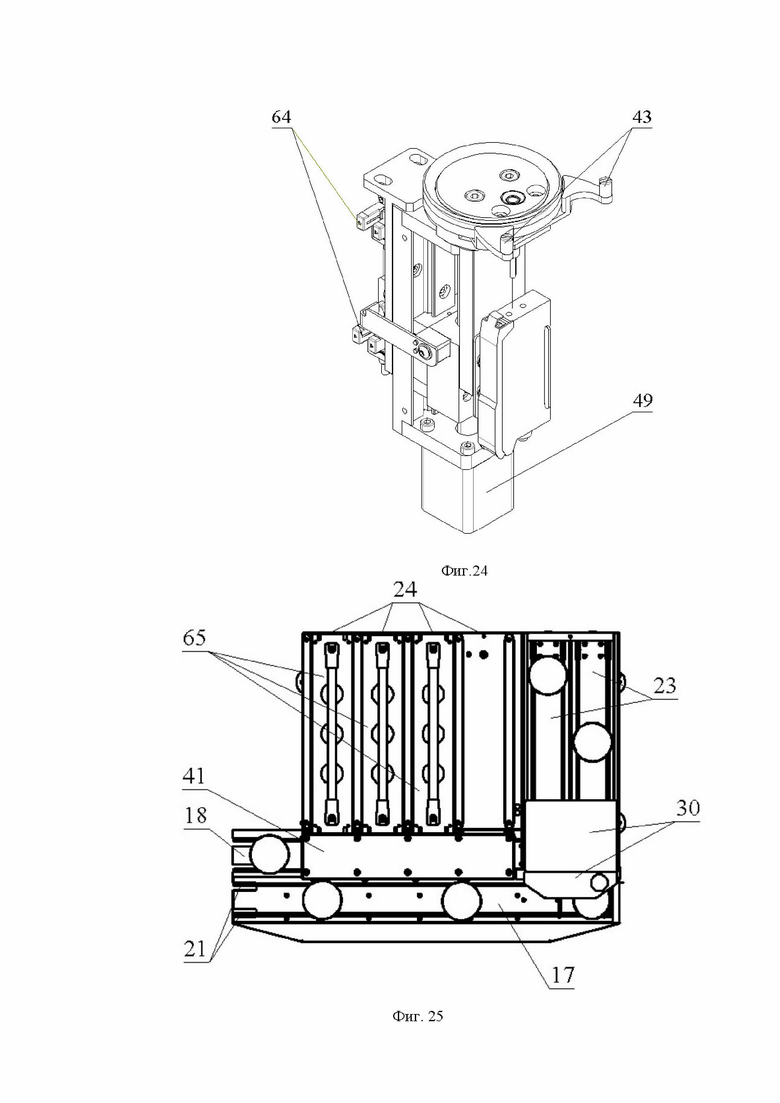
На фигуре 24 представлено средство перемещения контейнера в вертикальном направлении (лифт), предназначенное для размещения под соответствующим отсеком бокса выгрузки.
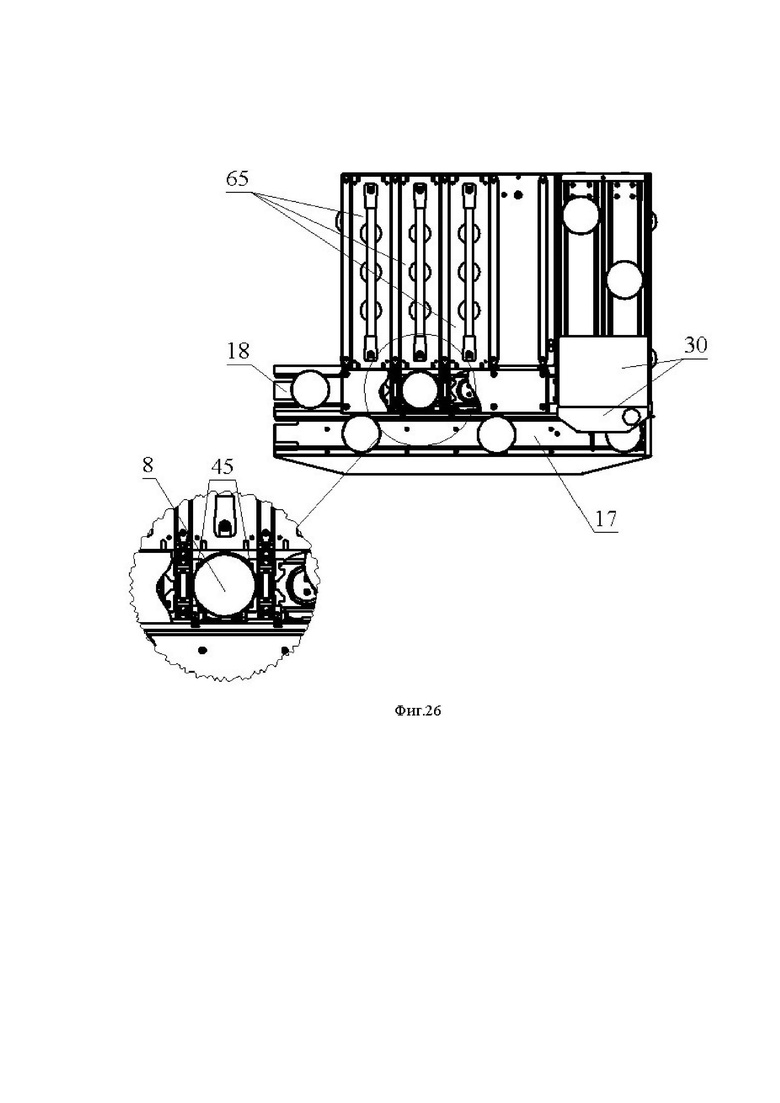
На фигурах 25-27 продемонстрирована схема перемещения контейнеров по транспортеру выгрузки в одну из ячеек бокса выгрузки и затем в лоток выгрузки.
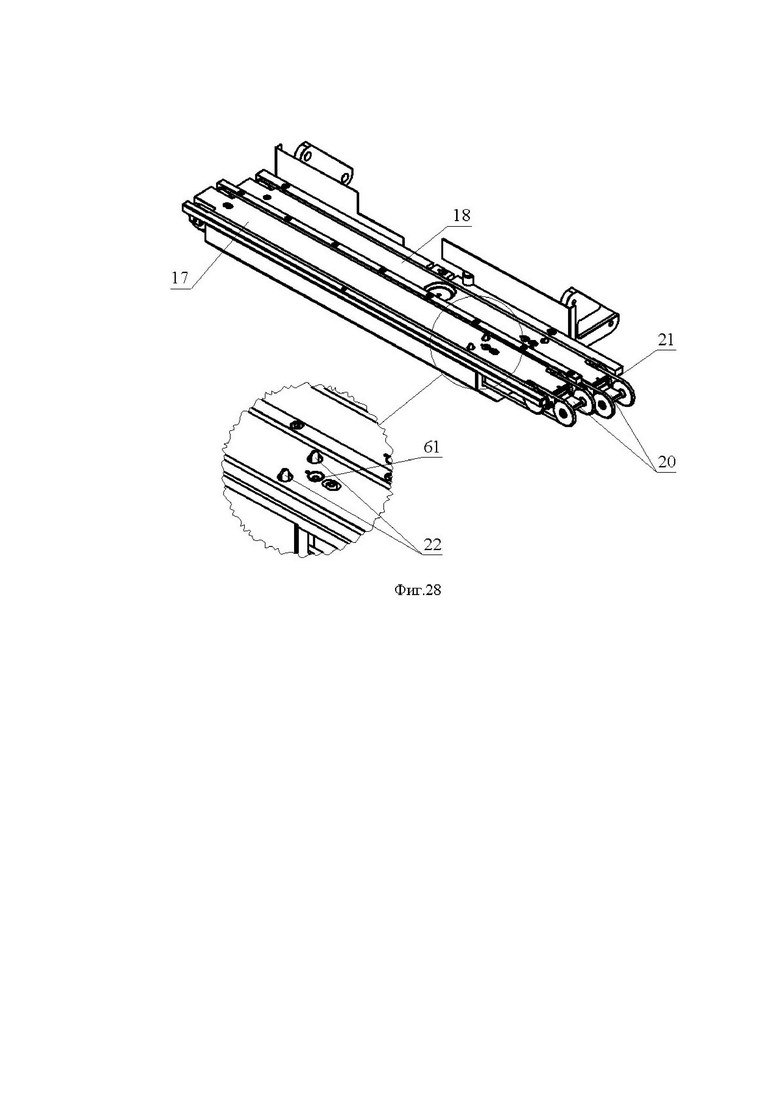
На фигуре 28 представлен вариант реализации транспортеров загрузки и выгрузки контейнеров, с встроенными датчиками наличия контейнеров и стопорами.
Позициями на чертежах обозначены следующие блоки и модули заявленной системы: 1 - камера инкубации, 2 - модуль загрузки и выгрузки контейнеров с образцами, 3 - модуль идентификации образца (модуль сканирования), 4 - модуль формирования цифрового изображения образцов (модуль фотографирования), 5 - модуль перемещения контейнеров в рабочем объеме камеры, 6 - блок управления, 7 - 3-х координатный манипулятор, 8 - контейнер с биологическим образцом, 9 - окно для загрузки и выгрузки контейнеров, 10 - верхнее окно камеры инкубации для связи с модулем 4, 11 - нижнее окно камеры инкубации для связи с модулем 4, 12 - шлюз, 13 - привод шлюза, 14 - створка шлюза.
Модуль загрузки и выгрузки контейнеров с образцами содержит: 15 первый (внешний) блок модуля 2, за пределами камеры инкубации, 16 - второй (внутренний) блок модуля 2, расположенный в рабочем объеме камеры инкубации.
Внешний блок 15 содержит: 17 - транспортер для загрузки контейнеров в камеру инкубации, 18 - транспортер для выгрузки контейнеров из камеры инкубации, 19 - основание транспортера, 20 - привод транспортера, 21 - приводной трос транспортера, 22 - стопор для фиксации контейнера на транспортере, 23 - лоток загрузки контейнера, 24 - лоток выгрузки контейнера, 25 - поворотная створка, 26 - боковая стенка лотка загрузки, 27 - торцевая стенка лотка загрузки, 28 - щель в торцевой стенке лотка загрузки для пропуска контейнеров на транспортер загрузки, 29 - основание или опорная платформа лотка загрузки, 30 - крышка лотков загрузки, 31 - средство перемещения контейнера в лотке загрузки контейнеров, 32 - пластина толкателя, 33 - штыри толкателя, 34 - прорези или пазы в основании лотка загрузки для перемещения по ним штырей толкателя, 35 - рычаг толкателя для соединения с электроприводом, 36 - цепной транспортер, 37 - захват цепного транспортера, 38 - поворотный барабан загрузочного лотка, 39 - площадка, соединяющая лоток загрузки с транспортером загрузки, являющаяся продолжением опорной платформы лотка загрузки, 40 - направляющий штырь, 41 - бокс выгрузки контейнеров из транспортера в лотки 24, 42 - кассеты для выгрузки контейнеров, 43 - стопор ячейки бокса выгрузки, 44 - средство вертикального перемещения контейнера в ячейке бокса выгрузки (лифт для выгрузки), 45 - поворотные створки ячейки бокса выгрузки, 46 - ось поворотных створок, 47 - горизонтальный толкатель, 48 - привод горизонтального толкателя, 49 - привод лифта бокса выгрузки, 50 - основание ячейки бокса выгрузки, 51 - боковые стенки ячейки бокса выгрузки.
Внутренний блок 16 модуля загрузки выгрузки контейнеров содержит: 52 - транспортер загрузки контейнеров камеры инкубации, 53 - транспортер выгрузки контейнеров камеры инкубации, 54 - средство вертикального перемещения контейнеров (лифт) камеры инкубации, 55 - сканер, 56 - средство вращения контейнера на лифте.
Модуль 4 формирования цифрового изображения биологических образцов (модуль фотографирования) содержит: 57 - верхний модуль фотографирования, 58 - нижний модуль фотографирования, 59 - узел перемещения контейнера (узел перемещения), 60 - узел формирования цифрового изображения (цифровой оптический блок).
Набор датчиков содержит: 61 - оптический датчик наличия контейнера на транспортере, 62 - датчик заполнения стопки и лотка, 63 - индуктивный датчик наличия кассеты на столе, 64 - датчики конечного положения лифта (положения уровня чашки при перемещении в вертикальном направлении в ячейке бокса выгрузки контейнеров).
Осуществление изобретения
Далее представлено более подробное описание заявляемого изобретения.
В настоящем описании использованы следующие термины, определения и сокращения.
«Система для инкубации и формирования цифровых изображений биологических образцов» при описании заявленного изобретения может иметь сокращенное название - система, система для инкубации, система инкубации, автоматизированная система.
«Контейнер» - емкость, в которой возможно размещение исследуемого образца, в том числе посредством ручной и/или автоматической инокуляции. Емкость, в которую может быть помещен образец, обычно содержит субстрат или среду с питательными веществами для роста целевых микроорганизмов. Согласно настоящему изобретению, в автоматизированной системе для проведения исследований могут быть использованы такие контейнеры, как чашки Петри (далее также - чашки), содержащие высеянную среду, пробирки с бульоном и предметные стекла с биологическими образцами и др.
«Биологический образец» (далее также - образец) - образец жидкости и (или) ткани организма человека, а также любой другой материальный образец, потенциально содержащий микробиологические объекты, взятый для проведения лабораторного исследования.
Термином «зона» при описании заявленного изобретения обозначена определенная область пространства, в которой реализуется предписанная функция устройства, модуля, блока, или их частей или отдельных конструктивных элементов, которая может иметь материальные или условные границы.
«Красная зона» - область пространства в камере инкубации, в которой возможно столкновение (соударение) манипуляторов.
«Рабочий объем камеры инкубации» или «Рабочая зона камеры инкубации» - объем в камере инкубации, в котором осуществляется инкубирование образцов и непосредственная работа находящихся в ней устройств, модулей и их частей.
Предлагаемый модуль загрузки и выгрузки контейнеров может быть встроен в систему для инкубации или в структуру микробиологической лаборатории (фиг. 1), которая помимо камеры инкубации может также содержать модули и/или блоки автоматического посева биоматериала в контейнеры, например, такие как чашки Петри, с функцией загрузки контейнеров в кассеты, маркировки контейнеров; подготовки образцов для микрофлюидных тестов; отбора колоний; определения резистентности к антибиотикам и т.д.
Система для инкубации и формирования цифровых изображений биологических образцов (фиг. 1), на примере которой продемонстрирована работа заявленного модуля, содержит:
- камеру 1 инкубации образцов, размещенных в контейнерах (далее также - камера инкубации, камера),
- модуль 2 загрузки и выгрузки контейнеров с образцами,
- модуль 3 идентификации образца с использованием датчиков и сканеров, для контроля местоположения и идентификации конкретной чашки Петри (далее также - модуль идентификации, модуль сканирования),
- два модуля 4 формирования цифровых изображений образцов (далее также - модуль фотографирования),
- модуль 5 перемещения контейнеров в рабочем объеме камеры, включающий два 3-х координатных манипулятора 7 для перемещения контейнеров 8 с образцами в модуль фотографирования 4 и их обратной загрузки в камеру инкубации 1,
- блок управления 6 с функцией управления перемещениями 3-х координатных манипуляторов 7 (далее также - блок управления).
Далее представлено подробное описание конструктивного решения модуля загрузки и выгрузки контейнеров и продемонстрирована работа системы на примере использования в качестве контейнеров чашек Петри.
Камера инкубации 1 (фиг. 2-4) представляет собой корпус по типу шкафа. Камера может содержать металлический каркас, облицованный с внешней и внутренних сторон. В рабочем объеме камеры расположены полки с ячейками (гнездами) для размещения чашек Петри с биологическими образцами. В камере размещены инженерные системы для создания в ее рабочем объеме оптимальных условий для роста микроорганизмов, включая средства формирования требуемого режима инкубации (средства нагрева, увлажнения, поддержания концентрации СО2 и циркуляции воздуха) рабочего объема. Камера инкубации может быть снабжена датчиками контроля температуры, влажности, состава среды, и средствами, обеспечивающими возможность поддержания требуемых параметров в автоматическом режиме.
В одном из вариантов осуществления изобретения камера 1 выполнена в виде корпуса, имеющего переднюю, заднюю, боковые стенки, крышу и днище (фиг. 2). Камера снабжена дверцей для ее обслуживания, а также, по меньшей мере, одним окном 9 для загрузки и выгрузки контейнеров с биологическими образцами и двумя окнами - верхним 10 и нижним 11, для связи с двумя модулями 4 формирования цифрового изображения образцов (модулями фотографирования). При этом окно для загрузки и выгрузки контейнеров 9 выполнено в передней стенке камеры 1 предпочтительно в ее средней части, а дверца камеры 1 - со стороны ее задней стенки. В одном из вариантов осуществления изобретения задняя стенка может быть выполнена в виде дверцы. При этом дверца и передняя стенка могут иметь выпуклый профиль внешней поверхности, как показано на фиг. 2. Выпуклая форма передней стенки камеры позволяет осуществить скрытый монтаж элементов модуля загрузки-выгрузки. Окно для загрузки и выгрузки контейнеров 9 снабжено шлюзом 12, выполненным с возможностью ограничения утечки среды из камеры инкубации. Шлюз 12 открывается на время загрузки контейнера в камеру инкубации или выгрузки из нее по сигналу с соответствующего датчика, расположенного на транспортере загрузки 17 с внешней стороны камеры или на транспортере выгрузки с внутренней стороны камеры и связанного с блоком управления 6. Блок управления 6 после получения сигнала с датчика направляет сигнал на привод шлюза - сигнал на открытие или закрытие шлюза. Таким образом, шлюз открывается автоматически, а контейнер с образцом перемещается с внешнего конвейера на внутреннее устройство модуля загрузки и выгрузки 2. Для отслеживания перемещения образца в рабочем объеме камеры 1 в режиме реального времени может быть использовано программное обеспечение. При этом контейнер с образцом снабжен машиночитаемой меткой (например, штрих-кодом, меткой RFID, и т. д.), а камера 1 (по меньшей мере, в месте входа контейнера, месте выхода контейнера и модулях фотографирования 4) снабжена соответствующими считывающими устройствами для этой метки. После выгрузки контейнеров из камеры инкубации на транспортер образцы могут быть отправлены на утилизацию, могут быть переданы в специальный лоток для ручного извлечения оператором или могут быть автоматически перемещены в следующий модуль или прибор. В одном из вариантов осуществления камеры инкубации 1 для загрузки и выгрузки контейнеров могут быть использованы отдельные окна со своими шлюзами, или шлюз может быть выполнен из двух перемещающихся независимо друг от друга частей.
Помимо первого окна - окна для загрузки и выгрузки контейнеров 9 - на передней стенке также расположены окна (верхнее 10 и нижнее 11) для связи с соответствующими модулями формирования цифрового изображения образцов. Перемещение чашек в рабочем объеме камеры 1 осуществляется с использованием соответствующего трехкоординатного манипулятора 7, обслуживающего свой модуль фотографирования и общую зону загрузки-выгрузки. В различных вариантах осуществления изобретения корпус камеры инкубации может иметь отдельные отсеки для размещения верхнего и нижнего модулей фотографирования.
Размещение полок с ячейками может быть реализовано различными способами. Каждая ячейка приспособлена для приема и удержания в ней контейнера с образцом в процессе инкубации. Предпочтительным является размещение полок по окружности камеры инкубации для обеспечения доступа трехкоординатного манипулятора 7 к ее ячейкам. Камера инкубации 1 может включать различное количество ячеек в зависимости от задач микробиологической лаборатории, например, от 600 до 720 ячеек. Каждая ячейка характеризуется координатами ее пространственного местоположения.
Модуль загрузки и выгрузки контейнеров с образцами 2 (фиг. 2) в одном из вариантов осуществления изобретения может содержать два блока, один из которых расположен в камере инкубации - внутренний блок 16, второй - за пределами рабочего объема камеры инкубации - внешний блок 15. Возможен вариант выполнения модуля 2 с одним внешним блоком 15.
Внешний блок 15 содержит два конвейера (транспортера) 17 и 18, расположенные на основаниях 19. Основания 19 могут быть жестко соединены с корпусом камеры инкубации 1. Внешний блок 15 содержит также узел загрузки контейнеров из лотков загрузки 23 на транспортер загрузки 17, узел выгрузки контейнеров с транспортера выгрузки 18 в лотки выгрузки 24. Лотки загрузки и лотки выгрузки могут быть смонтированы на одном столе, как показано на фиг. 7 и 9, или на отдельных столах, как показано на фиг. 6. Два возможных варианта размещения блока 15 модуля загрузки и выгрузки контейнеров 2 относительно камеры инкубации 1 представлены на фиг. 7 и 8. Транспортеры 17 и 18 могут быть расположены на одном или разных высотных уровнях. Предпочтительным является выполнение их на разных высотных уровнях (двухуровневое размещение транспортера загрузки и транспортера выгрузки), позволяющих разместить исполнительные механизмы горизонтального перемещения толкателей 47 лотков выгрузки под транспортером загрузки.
Конвейеры (транспортеры) 17 и 18 выполнены с возможностью перемещения контейнеров в одном направлении или во встречных направлениях и оснащены независимыми электроприводами 20 (фиг. 22). Один из конвейеров (транспортеров) - 17, транспортирует контейнеры с образцами от лотков загрузки 23 к шлюзу 12 камеры инкубации 1, а второй - 18, от шлюза 12 к лоткам выгрузки 24. Предпочтительным является выполнение транспортеров, перемещающих контейнеры во встречном направлении, что позволяет более компактно располагать оборудование в пределах лаборатории, например, совместив систему загрузки и выгрузки в один блок. Конвейеры могут иметь различное конструктивное выполнение. В одном из вариантов реализации конвейер может иметь ленточное исполнение, содержать несущую ленточную часть. В альтернативном варианте выполнения в качестве несущего элемента может быть использован полимерный трос круглого сечения, перемещаемый по неподвижному основанию 19, представляющему собой конвейерную дорожку, с помощью роликов, соединенных с их приводами 20. Использование троса более предпочтительно, чем ленты, поскольку конвейерная дорожка между тросами (меньшее диаметра чашки) может быть использована для размещения лифтов, стоперов, датчиков наличия чашек, или других конструктивных элементов и узлов, включая элементы контроля процесса перемещения контейнеров по транспортеру.
На конвейерной дорожке по ее длине транспортеров 17 и 18 могут быть расположены оптические датчики наличия контейнеров 61 и стопоры 22 для фиксации контейнера в заданном пространственном положении, приводимые в движение электромагнитами (фиг. 28). Стопоры 22 могут быть реализованы в виде выдвижных штифтов, которые перемещаются в вертикальном направлении из крайнего нижнего положения - на уровне или ниже поверхности конвейерной дорожки - в крайнее верхнее положение при подаче питания на электромагниты, и возвращаются в исходное положение при снятии питания под действием пружины. Стопоры 22 расположены на транспортере парами, при этом стопоры каждой пары расположены таким образом, чтобы расстояние между ними было приблизительно равно 0,75 от диаметра контейнера для обеспечения его надежной остановки. Перед шлюзом 12 транспортера загрузки 17 и после шлюза 12 транспортера выгрузки 18 с внешней стороны камеры 1 расположены поворотные створки 25 (как показано на фиг. 4, 5 и 8), обеспечивающие перемещение контейнера с транспортера загрузки 17 к шлюзу 12 или от шлюза 12 на транспортер выгрузки 18 с изменением траектории движения контейнера, например, поворотом на 90 градусов.
На транспортер загрузки 17 контейнеры поступают из узла загрузки, содержащего лотки загрузки 23 (фиг. 9-22), количество которых может варьироваться в зависимости от вместимости камеры инкубации - от двух и более. Лотки загрузки 23 могут быть выполнены съемными и несъемными, в виде емкости или корпуса, имеющего, по меньшей мере, две параллельно расположенные боковые стенки 26, закрепленные на основании. В одном из вариантов выполнения лотков загрузки они дополнительно снабжены торцевой стенкой 27 со стороны сопряжения с транспортером 17 для загрузки контейнеров в камеру инкубации 1, при этом торцевая стенка 27 снабжена щелью 28 или расположена с отступом от основания 29 лотка загрузки 23 с обеспечением перемещения на транспортер нижнего контейнера из стопки. Щель может быть выполнена высотой на 3-4 мм больше высоты контейнера (например, чашки Петри). В качестве основания 29 лотка загрузки может выступать опорная поверхность стола, а боковые стенки лотка загрузки могут быть жестко закреплены на поверхности стола. Возможен вариант выполнения лотков загрузки в виде отдельных съемных и перемещаемых емкостей, устанавливаемых на стол, к которому подведены транспортер загрузки. Лотки загрузки 23 сконфигурированы под габариты используемых контейнеров. При использовании в качестве контейнеров, например, чашек Петри, лотки загрузки выполнены с возможностью размещения в них чашек Петри в один ряд по горизонтали и, по меньшей мере, два ряда по вертикали, при этом боковые стенки для чашек Петри выступают в качестве направляющих. В конкретном варианте выполнения (фиг. 20) лотки загрузки 23 имеют прямоугольную конфигурацию и габариты, обеспечивающие размещение в них одной чашки Петри по ширине, не менее 10 чашек по высоте и до 5 стопок из чашек по длине. Лотки предпочтительно оснащены оптическими датчиками наличия контейнеров 62 для определения приоритетов подачи контейнеров на транспортер в зависимости от алгоритма использования системы инкубации. В одном из вариантов выполнения лотков 23 такие датчики расположены со стороны входа в лоток, как показано на фиг. 12, а также со стороны выхода из лотка. Со стороны выхода лотки 23 снабжены съемной защитной крышкой 30.
Узел загрузки также снабжен средством 31 перемещения контейнера из лотка загрузки 23 на транспортер загрузки 17, которое может иметь различные варианты реализации.
В первом варианте реализации данное средство 31 выполнено в виде толкателя, представляющего собой прямоугольную пластину 32, снабженную вертикальными штырями 33 (фиг. 16). Штыри расположены таким образом, чтобы расстояние между ними было приблизительно равно 0,75 от диаметра контейнера. Пластина 32 закреплена под основанием 29 лотка загрузки 23 с возможностью возвратно-поступательного перемещения (фиг. 14, 15). При этом основание снабжено продольными пазами или прорезями 34 в проекции перемещения штырей 33 толкателя. Длина продольных пазов определяется протяженностью или диаметром контейнера (чашки Петри). Толкатели приводятся в движение электроприводами с ременной передачей, соединенной с рычагом 35. Штыри 33 перемещаются по продольным пазам 34 в опорной платформе (основании 29) лотков 23. При этом толкатели перемещаются по направляющим, имеющим профильные пазы. Форма данных пазов задает определенную траекторию перемещения штырей - в начале движения штыри 33 в исходном положении находятся ниже уровня опорной платформы в проекции за контейнером, расположенном на выходе из лотка загрузки, затем штыри 33 через прорези поднимаются на высоту не более высоты загруженного образцом контейнера, после чего перемещаются в направлении к транспортеру загрузки, выталкивая контейнер из лотка загрузки на транспортер. В конечной точке своей траектории перемещения штыри расположены за опорной платформой (основанием) лотка загрузки. Данное положение штырей толкателя продемонстрировано на фиг. 14. После чего толкатель занимает положение, при котором его штыри размещаются ниже уровня опорной платформы лотка загрузки (данное положение штырей показано на фиг. 15), затем перемещением толкателя в обратном направлении - к входу лотка - штыри возвращаются в исходное положение, готовое для выталкивания следующего контейнера из лотка загрузки на транспортер загрузки. Обратная траектория перемещения штырей 33 полностью проходит ниже уровня платформы, что обеспечивается формой продольных пазов в основании лотка загрузки.
В другом варианте реализации средство 31 перемещения контейнера из лотка загрузки 23 на транспортер загрузки 17 выполнено в виде цепного транспортера 36, как показано на фиг. 17, 10, в котором тяговое усилие создается двумя параллельно расположенными цепями. Для поочередной выдачи контейнеров на транспортер загрузки 17 цепной транспортер 36 лотка загрузки 23 снабжен двумя парами захватов 37, закрепленных на цепях и выполненных с возможностью взаимодействия с контейнерами (чашками Петри) при перемещении. При этом одна пара захватов выталкивает контейнер на транспортер загрузки 17, например, через щель 28 в торцевой стенке 27, а вторая - фиксирует контейнер из следующей стопки от преждевременной выдачи на транспортер.
Возможен вариант реализации узла загрузки, содержащего лотки загрузки 23, оснащенные поворотными барабанами 38, имеющими высоту, равную высоте лотка (фиг. 18, 19). Поворотные барабаны 31 представляют собой тонкостенные полуцилиндры, размещенные на выходе из лотка загрузки с возможностью поворота к входу лотка либо внутренней, либо наружной стороной. При этом в предпочтительном варианте выполнения данного устройства барабан 31 имеет диаметр, соответствующий диаметру контейнера - чашки Петри, выполняя тем самым, функцию ограничителя для стопки из чашек Петри перед их перемещением на транспортер загрузки. Такое положение барабана изображено на фиг. 18, где его внутренняя поверхность обращена в сторону входа в лоток загрузки, а внешняя - «смотрит» на транспортер загрузки. В таком положении в лоток подается (например, вручную оператором) стопка контейнеров, после чего барабан поворачивается на 180 градусов, препятствуя попаданию следующей стопки в зону действия толкателей. Далее по сигналу от датчика наличия контейнеров перед выходной щелью 28 лотка 23 средство перемещения контейнера 31 - цепной транспортер или толкатель штырями 33 или захватами 37 поочередно приподнимает и выталкивает контейнеры из стопки на наклонную площадку 39, соединяющую лоток загрузки с транспортером загрузки (фиг. 21). При повороте барабана вокруг своей оси на 180 градусов по часовой или против часовой стрелки его внутренняя поверхность «смотрит» на транспортер загрузки, а внешняя обращена в сторону входа в лоток загрузки. Такое положение барабана препятствует попаданию следующей стопки контейнеров к щели лотка загрузки, пока из предыдущей стопки контейнеров все чашки не будут выданы поочередно на транспортер загрузки. Барабаны приводятся в движение электроприводами с ременной передачей.
Площадка 39, соединяющую лоток загрузки с транспортером загрузки, расположена над транспортером для выгрузки контейнеров, может быть снабжена направляющим штырем 40 для контейнера при его перемещении на транспортер. Штырь 40 расположен перпендикулярно относительно транспортера загрузки и над ним с возможностью перемещения контейнера по транспортеру под штырем. Штырь 40 от крайнего - первого, лотка загрузки выполняет функцию ограничителя перемещения за пределы транспортера загрузки. При этом второй направляющий штырь 40 от соседнего - второго - лотка загрузки выполняет роль «гасителя колебаний» контейнера при его выталкивании из первого лотка загрузки на транспортер. Схема перемещения контейнера из лотка загрузки на транспортер загрузки показана на фиг. 21.
После выгрузки контейнера из камеры инкубации 1 контейнер по транспортеру выгрузки 18 перемещается в бокс выгрузки 41 (фиг. 22), который состоит из ячеек или отсеков, соединенных с лотками для выгрузки контейнеров 24. Ячейки являются приемной частью лотка выгрузки контейнеров. Лотки для выгрузки контейнеров могут иметь конфигурацию, аналогичную лоткам для загрузки контейнеров 23, в каждый лоток может быть установлена кассета 42, обеспечивающая удобство при переноске партии контейнеров. Каждая ячейка содержит основание 50, расположенное над транспортером выгрузки 18, боковые стенки 51 и крышу, и снабжена средством вертикального перемещения контейнера - лифтом 44 (фиг. 22, 24), при этом основание ячейки выполнено с отверстием для свободного перемещения через него лифта с контейнером в вертикальном направлении. Лифт 44 (фиг. 22, 24) снабжен площадками для размещения контейнеров, и в исходном положении размещен не выше уровня транспортера выгрузки. Каждая ячейка также снабжена стопорами 43 (фиг. 24), выполненными аналогично стопорам 22 и размещенными в исходном положении под транспортером 18 или на его уровне. Стопоры 43 в одном из вариантов реализации изобретения могут быть закреплены на площадке лифта 44, как показано на фиг. 24. Ячейки снабжены оптическими датчиками 61 наличия контейнера на транспортере 18, поворотными створками 45, закрепленными на боковых стенках ячеек, пропускающими контейнер при перемещении лифтом 44 вверх и блокирующими обратное перемещение контейнера, горизонтальным толкателем 47 для штабелирования стопок контейнеров в лоток 24. Лоток для выгрузки содержит оптические датчики 62 заполнения стопки и лотка.
Лифт 44 может иметь различное конструктивное выполнение. В одном из вариантов реализации лифт 44 содержит кронштейн, на котором размещена площадка для размещения контейнера, снабженная датчиком наличия контейнера на лифте, направляющие (вертикально ориентированные), подъемный механизм в виде шагового электродвигателя, снабженного ременной передачей для перемещения кронштейна по направляющим, датчики 64 верхнего и нижнего положения контейнера на лифте (концевые выключатели), с помощью которых осуществляется контроль и управление перемещением контейнера в вертикальном направлении в ячейке бокса выгрузки контейнеров. В другом варианте реализации средство перемещения контейнеров в вертикальном направлении (лифт) содержит кронштейн, снабженный поворотным столиком для размещения контейнера с датчиком наличия контейнера, направляющие (вертикально ориентированные), подъемный механизм в виде шагового электродвигателя, снабженного ременной передачей для перемещения кронштейна по направляющим, механизм вращения поворотного столика, выполненный в виде шагового электродвигателя, размещенного в своем цилиндрическом корпусе, который закреплен на кронштейне под поворотным столиком, датчики верхнего и нижнего положения контейнера на лифте (концевые выключатели), а также датчик выдвинутого положения совмещенных со столиком лифта стопоров (при их наличии).
При перемещении по транспортеру выгрузки контейнер, достигнув выдвинутых стопоров 46, останавливается, поскольку расстояние между стопорами меньше размера контейнера. Расположенный между стопорами датчик наличия контейнера 61 формирует сигнал на остановку транспортера и поднятие контейнера лифтом в стопку, формируемую в ячейке бокса 41 для выгрузки контейнеров. Поворотные створки 45 ячейки бокса выгрузки 41 представляют собой пластины, закрепленные на противоположных боковых стенках 51 ячейки бокса 41 с возможностью поворота вокруг горизонтальной оси 46 пластины на угол 90 градусов, при этом в исходном положении (без контейнера) створки расположены в горизонтальной плоскости над транспортером, например, на основании 50, и имеют конфигурацию, обеспечивающую формирование окна, размер которого меньше диаметра контейнера, при этом больше диаметра площадки лифта, на котором он расположен. В предпочтительном варианте реализации изобретения часть поворотных створок перекрывает часть отверстия основания 50 ячейки с обеспечением концентричного расположения отверстия основания 50 и окна, образуемого створками 45. Такое выполнение поворотных створок 45 обеспечивает перемещение через упомянутое окно контейнера из крайнего нижнего положения в крайнее верхнее положение с помощью лифта 44, при этом створки «открываются» при их повороте из горизонтального положения в верхнее вертикальное положение при воздействии на них стенками контейнера. После достижения контейнером заданной высоты - крайнего верхнего положения - створки «закрываются», занимая исходное горизонтальное положение, формируя, тем самым, опорную площадку, на которой размещается контейнер при перемещении лифта из крайнего верхнего положения в крайнее нижнее положение. Таким образом, контейнер, поднимается лифтом выше створок и уже не может опуститься ниже створок. Стопка контейнеров формируется при поочередном вертикальном перемещении контейнеров, где каждый последующий контейнер «встраивается» в стопку снизу с одновременным перемещением вверх уже размещенных на створках контейнеров. Таким образом, стопка формируется по одному контейнеру. Горизонтальный толкатель 47 (фиг. 23) представляет собой шибер с профилем, близким к профилю контейнера, перемещающийся поступательно в горизонтальной плоскости по направляющим, расположенным по боковым стенкам ячейки бокса, и выталкивающий стопку контейнеров из ячейки бокса в соответствующий лоток выгрузки. В лотки 24 могут быть установлены кассеты 42 для приема отработанных контейнеров. Лотки могут быть снабжены индуктивными датчиками 63 наличия кассет 42. Лифт 44 и горизонтальный толкатель 47 имеют собственные электроприводы 48 и 49 и датчики конечных положений 64. Использование того или иного лотка определяется алгоритмами работы системы инкубации.
Блок 16, расположенный в камере инкубации, содержит две площадки для размещения контейнеров или два транспортера - загрузки и выгрузки контейнеров, расположенных в проекции окна камеры инкубации 9 (фиг. 8), одна из которых предназначена для загружаемого контейнера, вторая - для размещения выгружаемого контейнера камеры инкубации, при этом каждая из площадок снабжена средством вертикального перемещения контейнеров (лифтами), которые могут быть выполнены по аналогии с лифтами бокса выгрузки (фиг. 24) с электроприводами и винтовой передачей в зону сканирования, средством вращения контейнера в поле зрения сканера для его идентификации. Контейнер из внешнего блока 15 перемещается в камеру инкубации по транспортеру через окно 9 камеры 1, оснащенное шлюзом 12, имеющим 2 независимые створки 14, приводимые в движение своими электроприводами 13 и открывающимися по сигналам с датчиков 61 присутствия (наличия) контейнера перед шлюзом 12. В камере инкубации 1 от шлюза 12 до лифта 54, предназначенного для загрузки, и от лифта 54, предназначенного для выгрузки, до шлюза 12 контейнер транспортируется независимыми конвейерами (транспортерами) 52 и 53, движущимися во встречных направлениях и приводимых в действие независимыми электроприводами. С внутренней стороны шлюза 12 закреплена площадка для монтажа сканеров 55 (фиг. 8), являющихся частью модуля идентификации образца (модуля сканирования 3).
Модуль идентификации образца (модуль сканирования) 3 может иметь различное конструктивное выполнение и в одном из вариантов реализации включает в себя не менее двух сканеров 55 штрих-кодов, расположенных с внутренней стороны шлюза 12 камеры инкубации 1, закрепленных на кронштейне или платформе, соединенной с основанием внутреннего транспортера от шлюза до лифта в камере инкубации, и средства подсветки сканируемой области, закрепленные на кронштейне или платформе. Средства подсветки могут быть выполнены в виде светодиодных светильников. Каждый контейнер с образцом заранее маркирован, например, при помощи штрих-кода. Сканер 55 расположен с возможностью проведения идентификации контейнера с образцом при загрузке и выгрузке путем чтения и расшифровки этого кода. В альтернативном варианте исполнения система инкубации может быть оснащена системой считывания радиометок (RFID или NFC).
Модуль формирования цифровых изображений образцов (модуль фотографирования) 4 (фиг. 3 - 5) может иметь различное конструктивное выполнение и в одном из вариантов реализации включает узел перемещения контейнера 59 и узел формирования цифрового изображения 60 (цифрового оптического блока). При этом узел перемещения контейнера 59 в данном модуле может быть размещен в рабочем объеме камеры инкубации, а цифровой оптический блок 60 - в отдельном отсеке камеры инкубации или отдельном корпусе, который примыкает к камере инкубации 1 с внешней стороны и сообщается с рабочим объемом камеры инкубации через соответствующее окно (верхнее окно 10 и нижнее окно 11 для связи с модулем 4). Таким образом, контейнер с образцом может быть перемещен из рабочего объема камеры 1 с помощью узла 59 в цифровой оптический блок 60. Контейнеры для образцов подаются в цифровой оптический блок 60 через упомянутое окно 10 или 11. Цифровой оптический блок содержит расположенные цифровую камеру, два источника света или светильника, расположенные с возможностью обеспечения равномерного освещения размещенного в контейнере биологического образца. Светильники выполнены с рассеивателями цилиндрической, конической, параболической или сферической формы, что позволяет направлять свет на контейнер с образцом и цифровую фотокамеру, установленную в верхней части корпуса цифрового блока. Фокусировка камеры может осуществляться как вручную, так и при помощи отдельного электропривода.
Модуль перемещения контейнеров в рабочем объеме камеры инкубации 5 (фиг. 4, 5) может иметь различное конструктивное выполнение и в одном из вариантов реализации включает два 3-х координатных манипулятора 7, которые расположены в камере один над другим с возможностью обслуживания каждым манипулятором своей зоны - верхней и нижней, соответственно. При этом верхний манипулятор обеспечивает перемещение контейнеров между окном загрузки и выгрузки контейнеров 10, верхним модулем фотографирования и соответствующими (верхними) ячейками камеры инкубации. Нижний манипулятор обеспечивает перемещение контейнеров между окном загрузки и выгрузки контейнеров 11, нижним модулем фотографирования и соответствующими (нижними) ячейками камеры инкубации. Перемещение манипуляторов в модуле 5 может быть реализовано независимо друг от друга в соответствии с управляющими программами. Захват манипулятора имеет головку, фигурные губки (зажимы) с накладками, повторяющими форму внешней поверхности контейнера, при этом головка захвата выполнена с возможностью поворота вокруг горизонтальной оси для обеспечения изменения положения контейнера при взятии с полки/установки на полку (переворота контейнера). Это позволяет фотографировать размещенные в контейнерах образцы в обычном положении, а хранить - крышкой вниз для минимизации попадания конденсата на образец.
Поскольку манипуляторы механически имеют возможность переместиться в одну и ту же точку в пространстве (в рабочем объеме) камеры инкубации, в системе инкубации реализована совокупность программно-аппаратных мер по исключению их соударения в «красной зоне». Для этой цели датчики непрерывного контроля положения координат захвата каждого манипулятора, размещенные на вертикальной оси сервопривода, выдают непрерывный сигнал, получаемый в управляющем программном обеспечении. После этого блоком управления рассчитываются и формируются координаты, в которые может перемещаться второй (другой) манипулятор, и передается соответствующий сигнал на первый манипулятор для выполнения им команды по его перемещению в допустимое (безопасное) место в рабочем объеме камеры или остановке во избежание столкновения. Так, например, в момент, когда один из манипуляторов находится в области окна загрузки контейнеров, для второго манипулятора формируется разрешающий сигнал на перемещение в область модуля формирования цифрового изображения, при этом формируется запрещающий сигнал на перемещение в область окна загрузки. Кроме того, сервопривод вертикальной оси каждого манипулятора имеет индуктивный датчик наличия подвижной части в опасной зоне («красной зоне»). Сигнал указанных датчиков от каждого манипулятора также передается в блок защиты блока управления 6, который формирует по срабатыванию этих датчиков сигнал на остановку сервопривода.
Блок управления системой 6 (фиг. 1) представляет собой программно-аппаратный комплекс, включает локальное хранилище для программного обеспечения, необходимого для управления элементами системы, и независимое локальное хранилище для фотографий. Блок управления может содержать микропроцессор и комплект плат управления или микроконтроллеров, которые управляют функциями системы и обеспечивают работу по заданному алгоритму камеры инкубации, модуля загрузки и выгрузки контейнеров с образцами, модуля идентификации образца (сканеры), модулей формирования цифрового изображения (модулей фотографирования) образцов, манипуляторов модуля перемещения контейнеров в рабочем объеме камеры. Блок управления состоит из источников питания, преобразователей напряжения, защитных автоматов, плат управления шаговыми двигателями, плат управления двигателями постоянного тока, плат управления светильниками, нагревателями и прочим оборудованием камеры инкубации. Элементы блока управления системой размещены под лицевыми панелями камеры инкубации или блока загрузки/выгрузки. Компоновка элементов блока управления может осуществляться на специальных панелях (щитах) или DIN-рейках. От внутреннего объема камеры инкубации элементы блока управления изолированы стенками корпуса камеры инкубации, от внешних воздействий - лицевыми панелями.
Система для инкубации и формирования цифровых изображений биологических образцов работает следующим образом.
Из лотков загрузки 23 контейнеры поочередно перемещаются на ленту транспортера 17. Контейнеры, подаваемые через лоток приоритетной загрузки, формируют сигнал на датчике наличия приоритетного контейнера, после чего программное обеспечение системы инкубации обеспечивает внеочередную транспортировку контейнера в камеру инкубации 1.
Контейнер, покидая ленту транспортера 17, через шлюз 12 подается в камеру инкубации 1, где на приемном лифте 54 сканер 55 штрих-кодов считывает штрих-код для идентификации контейнера и сопоставляет его номер с программой инкубации в базе данных системы инкубации. После идентификации контейнера трехкоординатный манипулятор захватывает контейнер и перемещает его в соответствующую ячейку камеры инкубации, заданную управляющей программой. Перемещение осуществляется по трем координатам при помощи сервопривода вертикальной оси, поворотного стола и привода горизонтальной оси трехкоординатного манипулятора. В ходе инкубации требуется периодически получать фотографии содержимого контейнера, для чего трехкоординатный манипулятор перемещает контейнер в соответствующий - верхний 57 или нижний 58 - модуль фотографирования 4. В то время, пока контейнер с образцом фотографируется, приемный лифт принимает следующий контейнер, после окончания цикла фотографирования для предыдущего контейнера поворотный диск модуля фотографирования меняет контейнер местами, и новый контейнер перемещается в корзину модуля фотографирования, а контейнер, покинувший модуль фотографирования 4, трехкоординатным манипулятором транспортируется в очередную позицию в соответствии с заданной программой исследования биологических образцов. После завершения цикла инкубирования образцов контейнер манипулятором транспортируется к лифту выгрузки 54, идентифицируется сканером 55 штрих-кодов, и, пройдя через шлюз 12, покидает камеру инкубации 1, перемещается на ленту транспортера выгрузки 18 и подается в один из лотков выдачи (выгрузки) 24, после чего может быть утилизирован или отправлен на дополнительное исследование.
Пример конкретной реализации изобретения.
Изготовлен макет системы, в котором камера инкубации имела габариты, обеспечивающие вместимость до 720 чашек Петри. В камере зеркально установлены два трехкоординатных манипулятора, как показано на фиг. 5, один из которых был закреплен на крыше камеры, второй - на днище камеры. Каждый манипулятор оснащен захватом и 3-координатным приводом. В средней части передней стенки камеры выполнено окно загрузки и выгрузки контейнеров с лифтами, состоящими из шаговых электродвигателей и винтовых передач и сканерами штрих-кодов для идентификации контейнеров. В макете был установлен модуль фотографирования, оснащенный цифровой камерой Daheng Imaging с разрешением 25 Мп. Снаружи камеры инкубации был установлен внешний блок модуля загрузки и выгрузки контейнеров с образцами, выполненный как показано на фиг. 9-24, содержащий транспортер загрузки, транспортер выгрузки, два лотка загрузки и четыре лотка выгрузки контейнеров. Результаты проведенных испытаний заявленной системы продемонстрировали более высокую скорость обслуживания контейнеров в потоковом режиме в процессе их загрузки и выгрузки в/из камеры инкубации, способствуя тем самым, повышению производительности камеры инкубации: частота выдачи контейнеров из модуля загрузки составляет до 6 шт./мин по сравнению с 3-4 шт./мин у прототипа; время транспортировки и штабелирования контейнера в наиболее удаленную ячейку бокса выгрузки составляет не более 10 секунд (сопоставимо с прототипом). Тестовые испытания модуля загрузки и выгрузки продемонстрировали удобство его обслуживания. В процессе тестовых испытаний не наблюдалось повреждений контейнеров с образцами в процессе загрузки и выгрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В КАМЕРЕ ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2812238C1 |
| СИСТЕМА ДЛЯ ИНКУБАЦИИ И ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811721C1 |
| МОДУЛЬ И СИСТЕМА ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813210C1 |
| ЦИФРОВОЙ ОПТИЧЕСКИЙ БЛОК, УСТРОЙСТВО И СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825976C1 |
| СПЕКТРОСКОПИЧЕСКАЯ ГОЛОВКА ДЛЯ ЦИФРОВОГО ОПТИЧЕСКОГО БЛОКА УСТРОЙСТВА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825977C1 |
| СПОСОБ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ БАНКНОТ, И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ, БАНКНОТ | 2020 |
|
RU2737603C1 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |
| АВТОНОМНАЯ СБОРОЧНАЯ МОДУЛЬНАЯ ЯЧЕЙКА | 2021 |
|
RU2755994C1 |
| ЧЕТЫРЕХСЕКЦИОННЫЙ АВТОМОБИЛЬНЫЙ ЛИФТ ДЛЯ АВТОМОБИЛЬНЫХ ПАРКОВОК | 2015 |
|
RU2587671C1 |

Изобретение относится к лабораторному оборудованию микробиологических исследований, к устройствам загрузки/выгрузки контейнеров с биологическими образцами для камеры инкубации биологических образцов. Модуль загрузки и выгрузки контейнеров для камеры инкубации биологических образцов содержит внешний блок с внешней стороны от камеры инкубации, включающий транспортер загрузки, транспортер выгрузки; лоток загрузки контейнеров; не менее двух лотков выгрузки контейнеров, с приемной ячейкой, над транспортером выгрузки, приемная ячейка снабжена средством вертикального перемещения в виде лифта, стопорами для остановки контейнера на транспортере, средством формирования стопки контейнеров, средством перемещения стопки в лоток выгрузки; средства перемещения из лотка загрузки на транспортер загрузки; набор датчиков. Внешний блок снабжен приемным боксом, приемные ячейки бокса образованы его поперечными перегородками, стопоры ячейки закреплены на площадке лифта, транспортеры загрузки и выгрузки расположены на разных уровнях по высоте для размещения привода средства перемещения сформированной стопки из приемной ячейки в лоток выгрузки под транспортером загрузки. Технический результат - снижение габаритных размеров модуля, повышение производительности камеры инкубации. 17 з.п. ф-лы, 28 ил.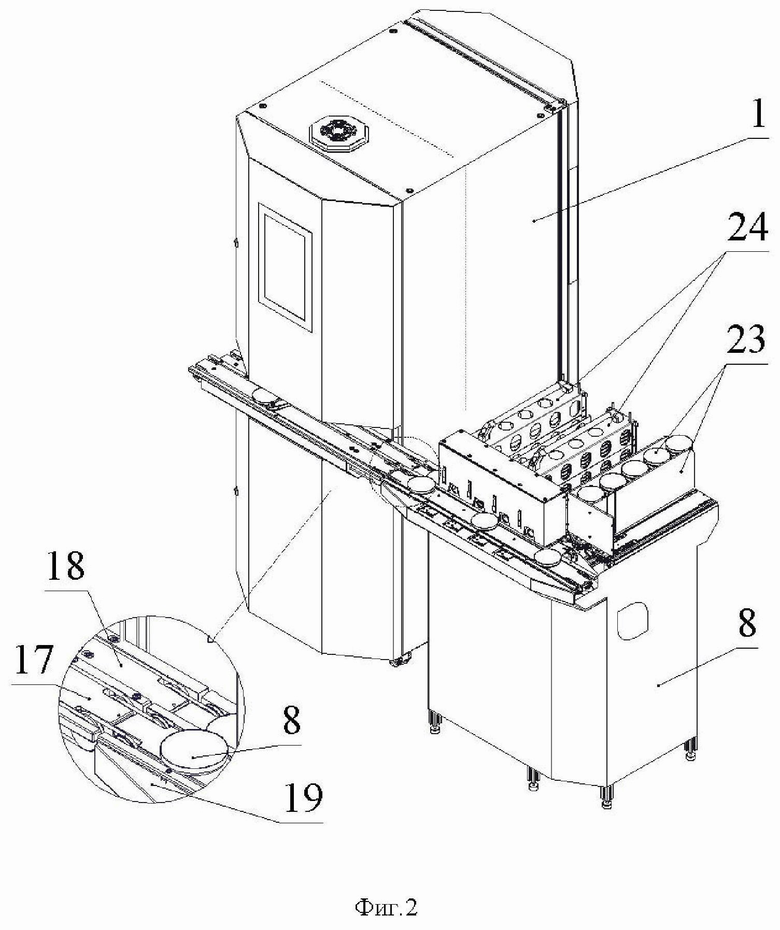
1. Модуль загрузки и выгрузки контейнеров для камеры инкубации биологических образцов, содержащий внешний блок, расположенный с внешней стороны от камеры инкубации, включающий транспортер загрузки контейнеров в камеру инкубации, предназначенный для перемещения контейнеров из лотка загрузки в камеру инкубации, и транспортер выгрузки контейнеров, предназначенный для перемещения контейнеров из камеры инкубации в лоток выгрузки; по меньшей мере один лоток загрузки контейнеров; по меньшей мере два лотка выгрузки контейнеров, каждый из которых снабжен приемной ячейкой, расположенной над транспортером выгрузки, при этом приемная ячейка снабжена средством вертикального перемещения контейнера в виде лифта, стопорами, выполненными с возможностью остановки контейнера на транспортере, средством формирования стопки контейнеров, средством перемещения сформированной стопки контейнеров в лоток выгрузки; средства перемещения контейнеров из лотка загрузки на транспортер загрузки; набор датчиков,
отличающийся тем, что
внешний блок снабжен приемным боксом, расположенным над транспортером выгрузки контейнеров, при этом приемные ячейки в боксе образованы его поперечными перегородками, стопоры приемной ячейки закреплены на площадке лифта, а транспортер загрузки и транспортер выгрузки расположены на разных уровнях по высоте с обеспечением возможности размещения привода средства перемещения сформированной стопки контейнеров из приемной ячейки в лоток выгрузки под транспортером загрузки.
2. Модуль по п.1, отличающийся тем, что лотки загрузки и лотки выгрузки контейнеров расположены на одной рабочей поверхности.
3. Модуль по п.1, отличающийся тем, что транспортеры загрузки и выгрузки выполнены с возможностью перемещения во встречных направлениях, оснащены независимыми электроприводами, стопорами для остановки контейнера на транспортере в заданном пространственном положении и оптическими датчиками наличия контейнеров.
4. Модуль по п.1, отличающийся тем, что стопоры выполнены в виде выдвижных штифтов, приводимых в движение электромагнитным приводом.
5. Модуль по п.1, отличающийся тем, что лифт приемной ячейки снабжен датчиком наличия контейнера, расположенным между стопорами.
6. Модуль по п.1, отличающийся тем, что транспортеры снабжены поворотными створками, выполненными с возможностью изменения траектории перемещения контейнера при повороте створки.
7. Модуль по п.1, отличающийся тем, что лотки загрузки выполнены съемными или выполнены с возможностью размещения в них съемных переносных кассет для приема контейнеров с образцами и перемещения сформированной стопки контейнеров средством перемещения из приемной ячейки непосредственно в кассеты, при этом лотки оснащены датчиками наличия кассеты и датчиками заполнения кассеты.
8. Модуль по п.1, отличающийся тем, что лотки загрузки снабжены торцевой стенкой, закрепленной со стороны транспортера загрузки, при этом торцевая стенка расположена с отступом от основания с образованием щели для перемещения через нее на транспортер нижнего контейнера из стопки.
9. Модуль по п.1, отличающийся тем, что лотки загрузки оснащены оптическими датчиками наличия контейнеров, расположенными со стороны входа и выхода лотка.
10. Модуль по п.1, отличающийся тем, что лотки загрузки оснащены средством поочередной выдачи контейнеров из лотков загрузки на транспортер загрузки, выполненным в виде цепного транспортера с двумя парами захватов, где одна пара захватов предназначена для выталкивания контейнера на транспортер загрузки, а вторая – для фиксации контейнера из следующей стопки от преждевременной выдачи на транспортер.
11. Модуль по п.1, отличающийся тем, что лотки загрузки оснащены средством поочередной выдачи контейнеров из лотков загрузки на транспортер загрузки, выполненным в виде толкателя, представляющего собой прямоугольную пластину, закрепленную под основанием лотка загрузки с возможностью возвратно-поступательного перемещения и снабженную вертикальными штырями, расположенными с возможностью выталкивания контейнера из лотка на транспортер загрузки, при этом основание контейнера снабжено продольными пазами или прорезями в проекции перемещения штырей толкателя.
12. Модуль по п.1, отличающийся тем, что лоток загрузки оснащен поворотным барабаном, выполненным в виде полуцилиндра с возможностью изменения положения при повороте на 180 градусов, при этом одно из положений барабана, при котором его внешняя выпуклая поверхность ориентирована на транспортер загрузки, предназначено для приема стопки контейнеров, а другое положение барабана - при повороте на 180 градусов, выполняет функцию разделительной перегородки между размещенной в нем стопкой и соседней стопкой контейнеров.
13. Модуль по п.1, отличающийся тем, что приемные ячейки контейнеров снабжены поворотными створками, пропускающими контейнер при перемещении его лифтом в приемную ячейку и блокирующими обратное перемещение контейнера.
14. Модуль по п.13, отличающийся тем, что поворотные створки приемной ячейки представляют собой пластины, закрепленные на противоположных стенках приемной ячейки с возможностью поворота вокруг горизонтальной оси пластины на угол 90 градусов, при этом в исходном положении - без контейнера - створки расположены в горизонтальной плоскости над транспортером и имеют конфигурацию, обеспечивающую формирование «окна», размер которого меньше диаметра контейнера, при этом больше диаметра площадки лифта, на которой он расположен, с обеспечением перемещения через упомянутое окно контейнера из нижнего положения в верхнее с помощью лифта, при этом створки «открываются» при их повороте из горизонтального положения в верхнее вертикальное положение при воздействии на них стенками контейнера, и после достижения контейнером заданной высоты, при которой створки «закрываются», занимая исходное горизонтальное положение, формируя тем самым опорную площадку, на которой размещается контейнер при перемещении лифта из крайне верхнего положения в крайнее нижнее положение.
15. Модуль по п.1, отличающийся тем, что средство перемещения сформированной стопки контейнеров из приемной ячейки в лоток выгрузки представляет собой вертикально расположенные пластину или шибер с профилем, близким к профилю контейнера, выполненные с возможностью возвратно-поступательного перемещения в горизонтальной плоскости приемной ячейки.
16. Модуль по п.1, отличающийся тем, что приводы модуля загрузки и выгрузки контейнеров выполнены электромеханическими.
17. Модуль по п.1, отличающийся тем, что дополнительно содержит внутренний блок, распложенный в рабочем объеме камеры инкубации, выполненный с возможностью сопряжения с блоком, расположенным с внешней стороны камеры инкубации через окно для загрузки и выгрузки контейнеров.
18. Модуль по п.17, отличающийся тем, что внутренний блок содержит две площадки для размещения контейнеров или два транспортера, расположенных в проекции окна камеры инкубации, один из которых предназначен для загружаемого в камеру контейнера, второй – для выгружаемого контейнера из камеры инкубации, при этом площадки или транспортеры снабжены средствами вертикального перемещения контейнеров, выполненными в виде лифта, и соединены с соответствующими транспортерами для загрузки или выгрузки контейнеров, расположенными с внешней стороны камеры инкубации.
| US 11041871 B2, 22.06.2021 | |||
| WO 2021212384 A1, 28.10.2021 | |||
| US 10760042 B2, 01.09.2020 | |||
| US 9028752 B2, 12.05.2015 | |||
| ИНКУБАТОР ТРОМБОЦИТОСОДЕРЖАЩИХ ТРАНСФУЗИОННЫХ СРЕД | 2015 |
|
RU2599032C1 |

