Изобретение относится к области вооружения, а именно к управляемым снарядам, и может быть реализовано в производстве рулевых приводов, содержащих потенциометрический датчик обратной связи.
Согласование электрического и механического нулей в рулевом приводе заключается в обеспечении симметричного расположения обмотки потенциометра относительно нулевого положения рулей. Это необходимо для обеспечения нулевой команды на выходе системы управления при нулевой команде на входе.
Известен способ согласования электрического и механического нулей рулевого привода снаряда 9М112 [1]. Схема, поясняющая этот способ, приведена на фиг.1. В состав рулевого привода входит силовой цилиндр с поршнем 1 и кинематической передачей 2 от оси рулей 3 к оси потенциометра с обмоткой 4 и токосъемником 5. В составе бортовой аппаратуры параллельно обмотке 4 подключено переменное сопротивление 6 с регулируемым выводом 7 для настройки "ложного" нуля при нулевом положении рулей. Наличие дополнительного сопротивления, необходимость в рабочем месте с подачей в рулевой привод электро- и пневмопитания усложняет техпроцесс сборки и настройки рулевого привода. Для автоколебательных приводов этот способ приводит к преждевременной выработке ресурса потенциометров и требует специальной компоновки управляемого снаряда для обеспечения регулировки.
Известен способ установки нулевого положения в следящих системах с позиционными датчиками [2], наиболее близкий к предлагаемому решению.
При согласовании командного и управляемого вала настройка выполняется следующим образом. Командный вал устанавливается в нулевое положение и с ним соединяется вал первого потенциометра. Затем корпус потенциометра освобождается в месте установки и поворачивается, пока щетка не придет в среднюю точку своего хода. После этого корпус закрепляется в этом положении. Таким образом, устанавливается нуль у одного из двух потенциометров, образующих выявитель рассогласования. Управляемый вал, например, ось орудия при автоматическом управлении положением орудия системой ПУАЗО (прибор управления автоматикой зенитного огня), ставится в нулевое положение. Вал второго потенциометра соединяется с управляемым валом, и напряжение подается на обмотки потенциометра. Корпус потенциометра поворачивается до тех пор, пока сигнал рассогласования не станет нулевым и закрепляется.
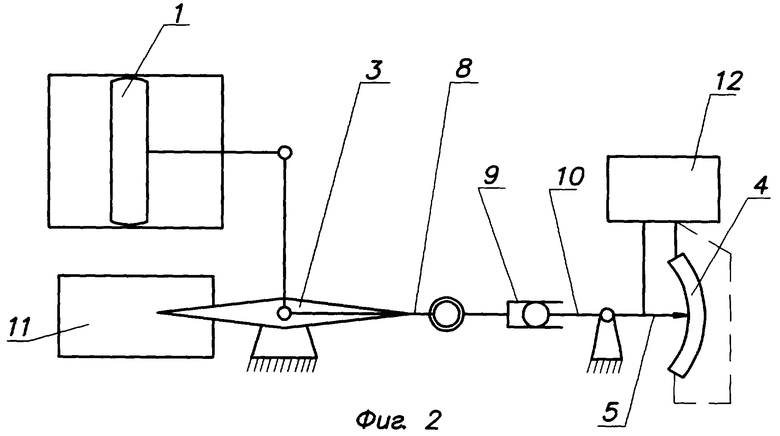
Применительно к рулевому приводу с потенциометром обратной связи этот способ, принятый за прототип, поясняется схемой фиг.2. В состав рулевого привода с поршнем 1 и рулями 3 входит потенциометр с обмоткой 4. Кинематическая передача, например, в виде составного рычага 8 с вилкой 9 и рычага 10 со сферой передает угловое движение от оси рулей к токосъемнику потенциометра. Способ применяется следующим образом. После настройки углов поворота рулей в приводе и установки потенциометра рулевой привод устанавливают в приспособление 11, обеспечивающее нулевое положение рулей. При зафиксированных рулях производят замеры сопротивления каждой половины обмотки 4 относительно токосъемника 5 омметром 12. Приложив усилие к рычагу 10, для выбора люфтов кинематической передачи в одну и другую сторону замеряют сопротивления каждой половины обмотки потенциометра и находят полусуммы замеров для каждой половины обмотки. В случае неравенства полусумм смещают токосъемник и повторяют замеры. Недостатками данного способа являются необходимость установки нулевого положения рулей и, следовательно, необходимость в специальной точной оснастке, а также большое количество замеров и расчетов для обеспечения согласования электрического и механического нулей.
Задачей данного изобретения является повышение точности и упрощение операций согласования электрического и механического нулей рулевого привода с потенциометром обратной связи.
Это достигается тем, что в способе согласования электрического и механического нулей рулевого привода управляемого снаряда с потенциометром обратной связи, основанном на установке токосъемника потенциометра согласованно с рулями и измерении сопротивлений между токосъемником и выводами потенциометра, потенциометр устанавливают в рулевой привод, с обеспечением нерабочих участков по краям обмотки потенциометра, токосъемник перемещают до упора рулей в крайние положения, замеряют при этом сопротивления нерабочих участков, после чего при необходимости смещают положение токосъемника до выравнивания сопротивлений нерабочих участков с допустимым превышением сопротивления в сторону меньшего угла поворота рулей и фиксируют токосъемник или элементы кинематической передачи.
Схема, поясняющая сущность предлагаемого способа, представлена на фиг.3 для привода с кинематической передачей к потенциометру; на фиг.4 - для привода без кинематической передачи.
В состав рулевого привода фиг.3 с поршнем 1 и рулями 3 входит потенциометр с обмоткой 4 и токосъемником 5. Кинематическая передача от оси рулей к токосъемнику потенциометра выполнена, например, в виде составного рычага 8 с вилкой 9, имеющих возможность углового смещения друг относительно друга, и рычага 10 со сферой на оси потенциометра. Подбором размеров рычагов 8 и 10 или увеличенной длиной обмотки обеспечивают наличие двух нерабочих участков на концах обмотки потенциометра. Далее способ согласования осуществляется следующим образом. После настройки углов поворота рулей по упорам токосъемник потенциометра и связанные с ним рычаги смещают до упора рулей в крайних положениях. При этом замеряют, например, омметром 12 сопротивление нерабочих участков обмотки потенциометра (между токосъемником и выводами запитки потенциометра). В случае неравенства сопротивлений нерабочих участков смещают токосъемник в сторону уменьшения большего сопротивления до выравнивания с допустимым или необходимым превышением сопротивления в сторону меньшего угла поворота рулей. Последнее условие необходимо из-за возможной разности углов поворота рулей по упорам вследствие конструктивных особенностей рулевого привода, а также погрешностей при настройке углов поворота рулей. Затем механически фиксируют составной рычаг 8.
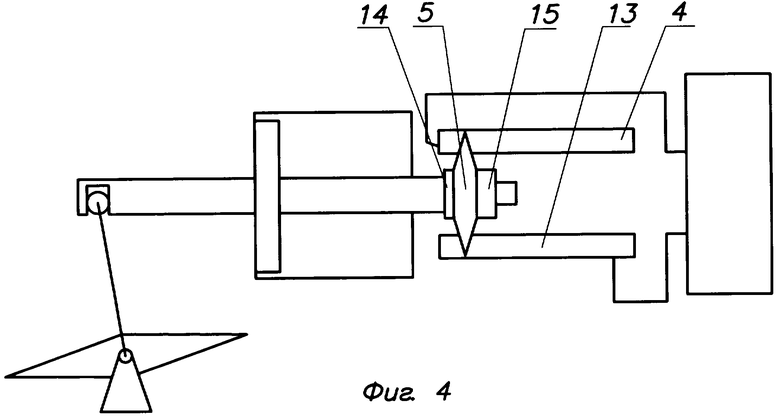
Для рулевого привода с потенциометром без кинематической передачи, фиг.4, обмотка 4 и токосъемная пластина 13 расположены параллельно оси поршня 1, а токосъемник 5 закреплен на штоке поршня. Последовательность операций при согласовании нулей аналогична вышеизложенному. Отличие состоит в том, что смещение токосъемника в случае неравенства сопротивлений нерабочих участков производят подбором прокладок 14, а фиксацию с помощью гайки 15.
Таким образом, предлагаемый способ согласования электрического и механического нулей по сравнению со способом-прототипом не требует предварительной установки рулей привода в нулевом положении, т.е. исчезает возможная погрешность установки и необходимая для этого технологическая оснастка, сокращается количество измерений и расчетов, что существенно повышает точность и технологичность сборки и настройки рулевых приводов, особенно в серийном производстве.
Источники информации
1. Управляемый снаряд 9М112. Техническое описание и инструкция по эксплуатации. Москва. 1976 г. - аналог.
2. В.Р. Арендт, К.Дж. Сэвент. Практика следящих систем. Госэнергоиздат, 1962 г., стр. 469-470 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ЦЕПИ ПОТЕНЦИОМЕТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2236668C2 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ РУЛЕВЫХ ПРИВОДОВ И АВТОПИЛОТОВ УПРАВЛЯЕМЫХ СНАРЯДОВ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2182702C2 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОКОЛЕБАТЕЛЬНЫХ РУЛЕВЫХ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145052C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2081446C1 |
| Игральное устройство | 1981 |
|
SU1012930A1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166727C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2172927C1 |

Изобретение относится к рулевым приводам управляемых снарядов. Сущность изобретения заключается в том, что при согласовании электрического и механического нулей рулевого привода управляемого снаряда потенциометр устанавливают в рулевой привод с обеспечением нерабочих участков по краям обмотки потенциометра. Токосъемник перемещают до упора рулей в крайние положения. При этом замеряют сопротивления нерабочих участков, после чего смещают положение токосъемника до выравнивания сопротивлений нерабочих участков с необходимым превышением сопротивления в сторону меньшего угла поворота рулей и фиксируют токосъемник или элементы кинематической передачи. Техническим результатом изобретения является повышение точности и упрощение операций согласования электрического и механического нулей рулевого привода с потенциометром обратной связи. 4 ил.

Способ согласования электрического и механического нулей рулевого привода управляемого снаряда с потенциометром обратной связи, основанный на установке токосъемника потенциометра взаимосвязанно с рулями, в том числе с использованием кинематической передачи, и измерении сопротивлений между токосъемником и выводами потенциометра, отличающийся тем, что потенциометр устанавливают в рулевой привод с обеспечением нерабочих участков по краям обмотки потенциометра, токосъемник перемещают до упора рулей в крайние положения, замеряют при этом сопротивления нерабочих участков, после чего смещают положение токосъемника до выравнивания сопротивлений нерабочих участков с необходимым превышением сопротивления в сторону меньшего угла поворота рулей и фиксируют токосъемник или элементы кинематической передачи.
| АРЕНДТ В.Р., СЭВЕНТ К.ДЖ | |||
| Практика следящих систем | |||
| Госэнергоиздат, 1962, с.469-470 | |||
| RU 94006235 A1, 27.11.1995 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ТИПА ОБОДЬЕВ ДЛЯ КОЛЕС | 1995 |
|
RU2106221C1 |
| US 4008869, 22.02.1977 | |||
| Способ создания кулис в занятом пару | 2018 |
|
RU2674621C1 |
| EP 0529796 A1, 03.03.1993. | |||

