Изобретение относится к области измерительной техники, в частности к измерению расстояния.
Известны способы измерения расстояния, основанные на принципе радиолокации в СВЧ диапазоне с частотной модуляцией зондирующего сигнала.
Известен способ измерения расстояния, реализованный в устройстве [1], заключающийся в излучении частотно модулированного радиосигнала в направлении материала, приеме, спустя время распространения, отраженного сигнала, смешивании его с частью излучаемого сигнала для получения сигнала разностной частоты, формировании двух импульсных сигналов в моменты совпадения частоты излучаемого сигнала с двумя заранее заданными эталонными частотами, измерения длительности интервала времени между этими сигналами и поддерживания этой длительности постоянной путем сравнения ее с длительностью эталонного интервала времени и соответствующего изменения амплитуды симметричного треугольного модулирующего напряжения, формировании импульсных сигналов, соответствующих экстремумам сигнала разностной частоты, изменении знака производной модулирующего симметричного треугольного напряжения в момент появления одного из этих импульсов после достижения частотой излучаемого сигнала одного из двух выше указанных заранее заданных значений, измерении разностной частоты полученного непрерывного сигнала в течение измерительного интервала, выбранного так, чтобы уменьшить дискретную ошибку счета периодов до допустимого значения и расчете расстояния по этой частоте. Недостатком этого метода является невысокая точность из-за неточности определения моментов экстремумов сигнала разностной частоты в широком диапазоне частот и нарушение вследствие этого формы сигнала.
Наиболее близким по совокупности существенных признаков является способ измерения расстояния [2], включающий формирование и излучение зондирующего сигнала с периодической частотной модуляцией в начальном диапазоне частотной модуляции; прием эхосигнала, выделение части зондирующего сигнала и смешивание его с принятым эхосигналом; выделение сигнала разностной частоты, вычисление спектра по сигналу разностной частоты, полученному за половину периода модуляции и определение его центральной частоты; вычисление расстояния по измеренной центральной частоте сигнала разностной частоты и количества минимальных интервалов расстояния укладывающихся в измеряемом расстоянии, соответствующих числу периодов сигнала разностной частоты на полупериоде модуляции; уменьшение начального диапазона частотной модуляции до получения целого числа интервалов расстояния, соответствующих целому числу периодов сигнала разностной частоты на полупериоде модуляции и максимуму спектральной составляющей, соответствующей измеряемому расстоянию. В этом способе один полупериод (прямой ход модулирующего напряжения) периода модуляции используется для измерения и записи параметров сигнала разностной частоты, а второй полупериод (обратный ход модулирующего напряжения) используется для спектральной обработки сигнала.
Описанный способ реализован устройством, содержащим антенну, управляемый источник зондирующего сигнала (УИЗС) с одним входом и двумя выходами; устройство цифровой обработки сигналов (УЦОС); два последовательно соединенных направленных ответвителя (НО); буферный усилитель; смеситель с двумя входами и одним выходом; схему предварительной аналоговой обработки (СПАО) с двумя входами и одним выходом. При этом первый выход УИЗС через два последовательно соединенных НО соединен с антенной, второй выход соединен с первым входом УЦОС, а вход соединен с первым выходом УЦОС. Второй выход первого НО через буферный усилитель соединен с первым входом смесителя, а второй выход второго НО соединен со вторым входом смесителя, выход которого соединен со. входом СПАО, второй вход СПАО соединен с выходом УЦОС, а выход соединен со входом УЦОС.
Анализ описания и формулы патента позволяет сделать вывод, что указанный способ и устройство, реализующее этот способ, имеют недостаток, заключающийся в том, что минимально возможная ширина спектра ограничена временным интервалом измерения. Как указано на фиг.5 описания патента, минимально возможная ширина спектра (разность между верхней и нижней частотами основного лепестка спектра) соответствует разности расстояний 1,17 м. Указанная минимально возможная ширина спектра обусловлена способом измерения, согласно которому диапазон модуляции корректируется до получения целого числа периодов сигнала разностной частоты за временной интервал модуляции и обрабатывается сигнал разностной частоты, полученный за полупериод модуляции. При таком способе модуляции и обработки сигнала разностной частоты минимально возможная ширина спектра будет в том случае, если на интервале измерения (на полупериоде модуляции) будет получен сигнал разностной частоты в виде отрезка целого числа периодов. В этом случае на обратном ходе периода модуляции будет получен противофазный сигнал разностной частоты. Таким образом, на полном периоде модуляции получается фазоманипулированный сигнал. Спектр такого сигнала имеет подавленную центральную частоту. Поэтому в прототипе вычисляют спектр сигнала разностной частоты на полупериоде модуляции. Именно на полупериоде модуляции ширина спектра минимальна. Ограничение минимально возможной ширины спектра не позволяет, для ряда случаев, получить достаточную точность измерений.
Цель изобретения - повышение точности измерений за счет дополнительного сужения спектра сигнала разностной частоты.
Указанная цель достигается тем, что в способе измерения расстояния, включающем формирование и излучение зондирующего сигнала с периодической частотной модуляцией в начальном диапазоне частотной модуляции, прием эхосигнала, выделение части зондирующего сигнала и смешивание его с принятым эхосигналом, выделение сигнала разностной частоты его с принятым эхосигналом, выделение сигнала разностной частоты, вычисление спектра по сигналу, полученному на половине периода модуляции и определение его центральной частоты, вычисление расстояния по измеренной частоте сигнала разностной частоты и количества минимальных интервалов расстояния, уменьшение начального диапазона частотной модуляции до получения целого числа минимальных интервалов расстояния и максимума спектральной составляющей, соответствующей измеряемому расстоянию, дополнительно вычисляют спектр сигнала разностной частоты, полученный на интервале времени, кратном нескольким периодам модуляции, изменяют начальную частоту диапазона модуляции при сохранении его величины до достижения максимума полученного спектра на частоте, соответствующей измеряемому расстоянию, после чего по полученному значению указанной частоты вычисляют точное значение расстояния. Число периодов модуляции при дополнительном вычислении спектра выбирают исходя из требуемой точности определения расстояния.
Для осуществления способа формируют симметричный закон частотной модуляции, обеспечивающий линейное изменение частоты зондирующего сигнала.
За минимальный интервал принимают расстояние, соответствующее одному полупериоду сигнала разностной частоты. На малых расстояниях это условие обеспечивает дополнительное снижение погрешности измерений.
Заявленный способ обладает совокупностью признаков, неизвестных из уровня техники для способов подобного назначения, что позволяет сделать вывод о соответствии критерию "новизна".
Для доказательства изобретательского уровня необходимо учесть, что известен способ измерения расстояния [1], в котором с использованием цепи обратной связи осуществлена, во-первых, стабилизация средней крутизны изменения частоты зондирующего сигнала в интервале времени между моментами совпадения частоты управляемого источника зондирующего сигнала с двумя заранее заданными эталонными частотами и, во-вторых, осуществлено формирование симметричного модулирующего напряжения с амплитудой, при которой сигнал разностной частоты близок к непрерывному синусоидальному. Однако в этом способе есть фактор, снижающий точность измерения. Он связан с выполнением условий получения непрерывного синусоидального сигнала. Для этого необходимо вычислять производную сигнала разностной частоты для определения момента изменения знака производной напряжения модуляции. Такие вычисления невозможно выполнить точно в широком диапазоне частот, соответствующем диапазону изменения расстояния из-за сильного изменения фазы дифференцирующего устройства при изменении частоты (т.е. расстояния). Вследствие этого в местах изменения знака производной напряжения модуляции непрерывность сигнала разностной частоты будет нарушена из-за того, что смена знака произойдет раньше или позже нужного момента времени. Причем степень нарушения будет зависеть от дальности. Кроме того, необходимо учесть то, что момент перемены знака напряжения модуляции определяется по принятому сигналу, имеющему задержку, пропорциональную расстоянию. Вследствие этого результат от смены знака производной проявится на принятом сигнале с задержкой. В итоге происходит нарушение синусоидальной формы сигнала разностной частоты и возникает погрешность измерения частоты этого сигнала.
В заявленном способе формирование сигнала разностной частоты без скачков фазы, которые существуют во всех известных способах, выполняется путем уменьшение диапазона модуляции и изменения несущей частоты. Такие условия обеспечивают возможность расчета спектра в течение нескольких периодов модуляции, т.е. увеличить длительность обрабатываемой выборки сигнала разностной частоты и тем самым снизить ширину рассчитываемого спектра. В связи с тем, что критерием достижения наилучших условий (т.е. гладкого непрерывного сигнала синусоидальной формы) является ширина спектра и его максимальное значение, негативные факторы, присущие известным методам, здесь отсутствуют. При этом обеспечивается минимальная погрешность определения средней частоты спектра и, следовательно, вычисления расстояния.
Указанные отличия не следуют явным образом из доступных научно-технических источников, что позволяет сделать вывод о соответствии заявленного технического решения критерию изобретения "изобретательский уровень".
Сущность изобретения поясняется с помощью чертежей, изображенных на фиг.1-3.
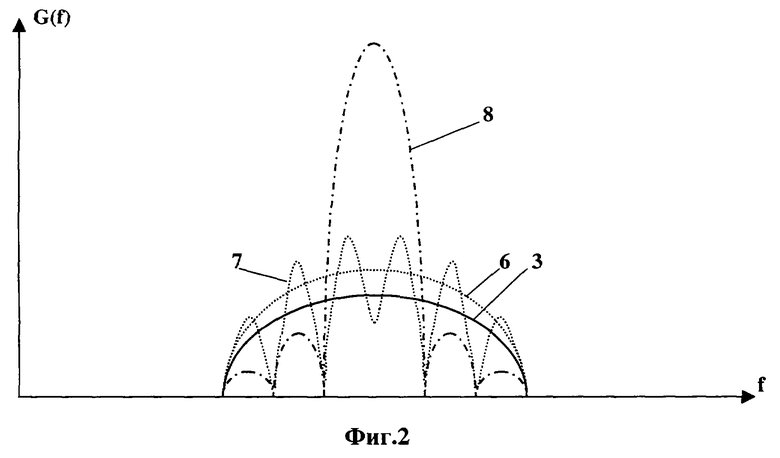
На фиг.1 изображены зависимости изменения частоты зондирующего сигнала и соответствующие сигналы разностной частоты, получаемые на разных шагах осуществления предлагаемого способа измерения расстояния.
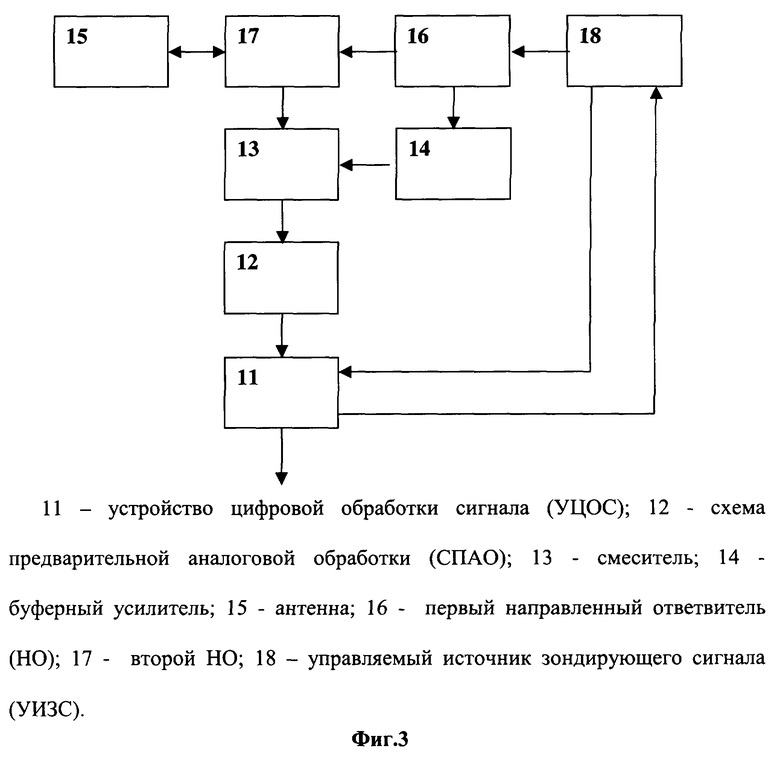
На фиг.2 изображены спектры сигналов разностной частоты, получаемые в результате осуществления предлагаемого способа.
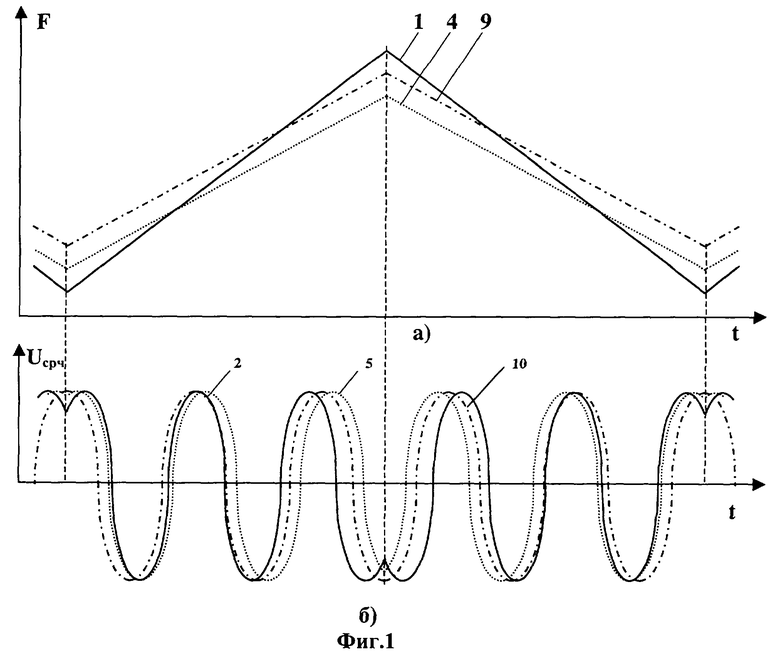
На фиг.3 изображена структурная схема устройства, с помощью которой может быть осуществлен предлагаемый способ.
Способ осуществляют путем формирования и излучения зондирующего сигнала с периодической частотной модуляцией в начальном максимальном диапазоне частотной модуляции (фиг.1а - сплошная линия 1); приема эхосигнала, выделения части зондирующего сигнала и смешивания его с принятым эхосигналом; выделения сигнала разностной частоты (фиг1б - сплошная линия 2). Далее осуществление способа производится за два шага.
На первом шаге по аналогии с прототипом вычисляют спектр (фиг.2 - сплошная кривая 3) по сигналу разностной частоты, полученному на полупериоде модуляции, определяют его центральную частоту и вычисляют расстояние по этой частоте и количество минимальных интервалов расстояния, укладывающихся на этом расстоянии. Затем уменьшают начальный диапазон частотной модуляции до получения целого числа минимальных интервалов расстояния и максимума спектральной составляющей, соответствующей измеряемому расстоянию. При этом минимальный интервал расстояния соответствует одному полупериоду сигнала разностной частоты, в отличие от прототипа, где минимальный интервал расстояния соответствует одному периоду сигнала разностной частоты. Соответствующий этому случаю закон изменения частоты зондирующего сигнала, сигнал разностной частоты и спектр сигнала разностной частоты показаны на фиг.1а, 1б и 2 точечными линиями соответственно номерам 4, 5 и 6. Начальная фаза сигнала разностной частоты случайна и может оказаться любой в диапазоне от 0 до π, т.е. в сигнале могут наблюдаться скачки фазы.
На втором шаге производится вычисление спектра сигнала разностной частоты, полученного на протяжении нескольких периодов модуляции. Этот спектр показан на фиг.2 - линия 7. Вследствие фазовой манипуляции сигнала разностной частоты спектральная составляющая на центральной частоте этого спектра может оказаться подавленной (вплоть до нуля). Затем производится изменение несущей частоты зондирующего сигнала при сохранении неизменной величины диапазона перестройки частоты до достижения максимума спектра на центральной частоте. Спектр, соответствующий этому случаю, показан на фиг.2 - штрихпунктирная линия 8. Полученный при этом закон изменения частоты зондирующего сигнала и соответствующий сигнал разностной частоты показаны на фиг.1а и 1б штрихпунктирными линиями 9 и 10. После достижения максимума спектра производится измерение его центральной частоты и вычисление расстояния. Количество полных периодов модуляции, в течение которых производится вычисление спектра на втором шаге, выбирается исходя из требуемой точности измерения частоты и, соответственно, расстояния.
Предложенный способ осуществляют с помощью устройства, структурная схема которого изображена на фиг.3. Устройство для измерения расстояния содержит устройство цифровой обработки сигналов (УЦОС) 11, схему предварительной аналоговой обработки (СПАО) 12, смеситель (См) 13, буферный усилитель (БУ) 14, антенну (А) 15, первый 16 и второй 17 направленные ответвители (НО), управляемый источник зондирующего сигнала (УИЗС) 18, выход которого соединен с антенной 15 через первый 16 и второй 17 последовательно соединенные НО, вторые выходы которых соединены соответственно со входом БУ 4 и вторым входом См 13, первый вход которого соединен с выходом БУ 14, а выход соединен со входом СПАО 12, выход которой соединен с первым входом УЦОС 11. Первый выход УЦОС 11 соединен со входом УИЗС 18, второй вход ее соединен со вторым выходом УИЗС 18, а второй выход УЦОС 11 является выходом устройства.
Устройство работает следующим образом. УЦОС 11 формирует сигнал, в соответствии с которым УИЗС 18 генерирует частотно-модулированный зондирующий сигнал с симметричным законом модуляции. Основная часть зондирующего сигнала с первого выхода УИЗС 18 через два последовательно соединенные НО 16 и НО 17 поступает в антенну 15, а часть - через второй выход НО 16 и буферный усилитель 14 поступает на первый вход смесителя 13, на второй вход которого со второго выхода НО 17 поступает эхосигнал, принятый антенной 15. С выхода смесителя 3 сигнал разностной частоты поступает на вход СПАО 12 и с ее выхода на первый вход УЦОС 11. На второй вход УЦОС 11 со второго выхода УИЗС 18 поступает сигнал, соответствующий границам полу периодов модуляции. В УЦОС 11 на первом шаге работы в соответствии со способом измерения расстояния производится спектральный анализ сигнала разностной частоты на одноименных полупериодах модуляции, вычисление центральной частоты спектра, соответствующей измеряемой дальности, и выработка сигналов управления, которые подаются на вход УИЗС 18 для управления величиной диапазона частотной модуляции. После достижения максимума этого спектра производится переход ко второму шагу обработки, при которой УЦОС 11 вычисляет спектр сигнала разностной частоты на протяжении нескольких полных периодов модуляции и выдает на вход УИЗС 18 сигналы управления несущей частотой зондирующего сигнала. Такое управление осуществляется до тех пор, пока указанный спектр не достигнет максимума на центральной частоте. Далее УЦОС 11 производит измерение центральной частоты спектра и вычисление измеряемого расстояния.
Со второго выхода УЦОС 11 результат вычисления точного расстояния поступает на выход устройства.
Все узлы устройства могут быть выполнены на стандартных элементах, производимых фирмами “ANALOG DEVICES”, “MOTOROLA”, “MICRONETICS”, “PEREGRINE” и др.
Заявленный способ обеспечивает уменьшение погрешности измерений пропорционально увеличению длительности интервала анализа УЦОС по сравнению с длительностью одного полупеоиода модуляции.
Источники информации
1. Патент РФ № 2151408, G 01 S 13/34, 30.06.1999.
2. Патент США № 5546088, G 01 S 13/18, 13.08.1996.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ РАДИОВОЛН (ВАРИАНТЫ) | 2006 |
|
RU2309428C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2008 |
|
RU2410650C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩИХ РАДИОВОЛН (ВАРИАНТЫ) | 2010 |
|
RU2423723C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2009 |
|
RU2399888C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И РАДИАЛЬНОЙ СКОРОСТИ | 2024 |
|
RU2840790C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ | 2010 |
|
RU2436117C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2003 |
|
RU2244268C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И РАДИОДАЛЬНОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩИХ РАДИОВОЛН | 2010 |
|
RU2434242C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2017 |
|
RU2661488C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ И РАДИОДАЛЬНОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2017 |
|
RU2655746C1 |
Изобретение относится к области измерительной техники, в частности к измерению расстояния, основанном на принципе радиолокации с периодической частотной модуляцией зондирующего сигнала. Предлагаемый способ измерения расстояния позволяет получить высокую точность измерения за счет увеличения длительности обрабатываемой выборки сигнала разностной частоты, что является достигаемым техническим результатом. Способ измерения расстояния включает: формирование и излучение зондирующего сигнала с периодической частотной модуляцией, вначале - в максимальном диапазоне частотной модуляции; прием эхосигнала и смешивание его с частью выделенного зондирующего сигнала для получения сигнала разностной частоты. По сигналу разностной частоты, полученному за полупериод модуляции, вычисляют спектр, его центральную частоту, расстояние до зондируемой поверхности и количество интервалов расстояния, укладывающихся в измеряемом расстоянии и соответствующих целому числу полупериодов сигнала разностной частоты. Затем уменьшают начальный диапазон частотной модуляции и изменяют его начальную частоту до достижения максимума спектра на его центральной частоте, который вычисляют по сигналу разностной частоты, полученному за время, кратное нескольким периодам модуляции. После достижения максимума спектра производится измерение его центральной частоты и вычисление расстояния. В предлагаемом способе число периодов анализа частотной модуляции, которую осуществляют по симметричному треугольному закону, выбирается из требуемой точности определения расстояния, а минимальный интервал расстояния соответствует одному полупериоду сигнала разностной частоты. 3 з.п. ф-лы, 3 ил.
| US 5546088 А, 13.08.1996 | |||
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ (ВАРИАНТЫ) | 1999 |
|
RU2154285C1 |
| РАДИОЛОКАТОР С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩЕГО СИГНАЛА | 1993 |
|
RU2060514C1 |
| Регулятор расхода | 1982 |
|
SU1043601A2 |
| WO 020633336 А1, 15.08.2002. | |||

