Изобретение относится к области измерительной техники, в частности к измерению расстояния и скорости в частотной радиолокации.
Известен способ измерения скоростей и координат целей [1] путем излучения непрерывного частотно-модулированного зондирующего сигнала, приема отраженного сигнала в одной или нескольких пространственных позициях, перемножения его с излучаемым сигналом и вычисления матрицы значений функций корреляции (ФК) полученного сигнала и двумерной (дальность, скорость) матрицы базисных сигналов, сформированных из модулирующего сигнала. Дальности и скорости обнаруженных целей вычисляют по номерам элементов матрицы ФК, в которых значения ФК превышают пороговый уровень. Значение скорости уточняют вычислением частот составляющих спектра корреляционных сигналов, полученных как последовательность значений ФК за время накопления сигнала. При приеме отраженного сигнала в нескольких пространственно разнесенных позициях формируют для каждой позиции трех (расстояние, скорость, угловая координата) или четырехмерную матрицу базисных сигналов и по номерам соответствующей матрицы суммарных по позициям ФК определяют дальности, угловые координаты и скорости обнаруженных целей.
Система для измерения скоростей и координат целей содержит антенно-фидерное устройство, гомодинное приемопередающее устройство, коррелометр, формирующий матрицы базисных сигналов и вычисляющий функции корреляции и корреляционные сигналы, и процессор, формирующий модулирующий сигнал и вычисляющий скорости и координаты целей.
Достигаемым техническим результатом является повышение точности измерения скоростей и координат целей, предельной дальности, разрешающей способности при обеспечении безопасности дорожного движения.
Известен способ радиолокационного измерения скоростей и координат целей и система для его осуществления [2]. Сущность изобретения заключается в том, что за счет синхронизации аналоговой и цифровой частей системы устраняются систематические ошибки измерения дальности, повышается точность измерения и увеличивается стабильность измерения.
Известен способ определения количества, скорости и дальности целей и амплитуд отраженных от них сигналов по ответному сигналу в цифровом канале радиолокатора [3]. Сущность изобретения заключается в том, что, сравнивая спектр зарегистрированного отраженного от движущейся цели сигнала с известным образцом - спектром сигнала, отраженного от неподвижной цели, преобразованным по скорости и дальности, определяют количество целей, их скорости, дальности и амплитуды их сигналов, при этом не требуется разбивать тракт обработки на каналы дальности.
Известен способ одновременного измерения расстояния и радиальной скорости зондируемой цели [4 стр. 365-370], являющийся прототипом, радиодальномером с периодической симметричной пилообразной частотной модуляцией (ЧМ) зондирующих радиоволн, цикл работы которого включает: генерирование радиочастотного сигнала с периодической частотной модуляцией с известными значениями минимальной частоты ƒ0, диапазона ЧМ Δƒ, периода модуляции Тмод с ветвью линейного возрастания частоты (восходящей ветвью) длительностью Tмод/2 и ветвью линейного снижения частоты (спадающей ветвью) длительностью Tмод/2 формирование и излучение радиоволн в направлении зондируемой цели, выделение части генерируемого радиочастотного сигнала, прием, спустя время распространения, эховолн и формирование из них отраженного сигнала, смешивание его с выделенной частью генерируемого радиочастотного сигнала, выделение низкочастотных составляющих результирующего сигнала и выделение из них сигнала разностной частоты (СРЧ), содержащего информацию о расстоянии до зондируемой цели и ее скорости, измерение разностных частот Fвосх и Fспад на восходящей и спадающей ветвях диапазона ЧМ, вычисление расстояния r до цели и ее радиальной скорости νr по известным скорости распространения радиоволн и разностным частотам СРЧ на восходящей и спадающей ветвях диапазона ЧМ.
Недостатки цитированных способов заключаются в том, что при зондировании подвижной цели радиоволнами с частотной модуляцией получается СРЧ с паразитной частотной модуляцией (ПЧМ), которая приводит к погрешности измерения.
Перемещение цели с радиальной скоростью νr относительно радиолокатора приводит к смещению частоты отраженных радиоволн относительно зондирующих на величину Допплеровской частоты ƒдоп [4 стр. 49-52]

где ƒзонд - частота зондирующей волны;
ƒ(t) - частота генерируемого сигнала;
t - текущее время внутри одной ветви (восходящей или спадающей) периода модуляции;
с - скорость распространения электромагнитных волн.
Сигнал разностной частоты u(t), выделенный из смешанных отраженного сигнала от цели и части генерируемого радиочастотного сигнала представляется в виде

где U(t) - амплитуда СРЧ;
ϕ - постоянная составляющая фазы СРЧ, связанная с фазой отраженных волн (на дальнейший анализ не влияет, поэтому считаем равной нулю).
Для достижения высокой точности измерения в дальномерах с частотной модуляцией стараются обеспечить возможно больший диапазон перестройки частоты Δƒ при ЧМ. Для измерения расстояния до неподвижной цели обязательным условием высокой точности измерения является линейный закон изменения частоты при ЧМ, но тогда для подвижной цели СРЧ uлин(t), в частности, на временном интервале восходящей ветви будет

Из приведенного выражения видно, что при зондировании подвижной цели СРЧ приобретает смещение частоты и паразитную частотную модуляцию (ПЧМ), которая приводит к погрешности оценки частоты СРЧ при любых методах обработки СРЧ и, как следствие, к погрешности измерения как расстояния, так и скорости. Погрешность оценки частоты СРЧ еще больше увеличивается при наличии паразитной амплитудной модуляции (ПАМ) U(t), которая обычно сопровождает частотную модуляцию генерируемого сигнала.
Технический результат изобретения - уменьшение погрешности измерения как расстояния, так и скорости из-за влияния ПЧМ и совместного влияния ПЧМ и ПАМ.
Технический результат достигается тем, что в способе измерения расстояния и радиальной скорости радиолокатором с периодической симметричной пилообразной частотной модуляцией (ЧМ) зондирующих радиоволн, цикл которого включает: генерирование радиочастотного сигнала с периодической частотной модуляцией с известными значениями минимальной частоты ƒ0, диапазона ЧМ Δƒ, периода модуляции Тмод с ветвью возрастания частоты (восходящей ветвью) длительностью Тмод/2 и ветвью снижения частоты (спадающей ветвью) длительностью Тмод/2, формирование и излучение радиоволн в направлении цели, выделение части генерируемого радиочастотного сигнала, прием, спустя время распространения, эховолн и формирование из них отраженного сигнала, смешивание его с выделенной частью генерируемого радиочастотного сигнала, выделение низкочастотных составляющих результирующего сигнала и выделение из них СРЧ, содержащего информацию о расстоянии до цели и ее скорости, измерение разностных частот Fвосх и Fспад, соответственно на восходящей и спадающей ветвях диапазона ЧМ, вычисление расстояния r до цели и ее радиальной скорости νr по известным скорости распространения радиоволн и разностным частотам СРЧ на восходящей и спадающей ветвях диапазона ЧМ, дополнительно выполняют следующую совокупность действий с соблюдением следующих условий. В каждом цикле измерений по результату предыдущего измерения расстояния r до цели и ее радиальной скорости νr, изменяют закон ЧМ и используют его в следующем цикле измерения расстояния до цели и ее скорости, при этом зондирующий сигнал генерируют с законом ЧМ на восходящей ветви ЧМ в соответствии с выражением

а на спадающей ветви ЧМ в соответствии с выражением

где ƒвосх(t) и ƒспад(t) - частоты генерируемого сигнала, соответственно на восходящей и спадающей ветвях;
ƒ0 - минимальная частота диапазона ЧМ;
Δƒ - диапазон ЧМ;
Tмод - период модуляции;
t - текущее время внутри одной ветви (восходящей или спадающей) периода модуляции;
νr - радиальная скорость цели, определенная на предыдущем цикле измерений;
rвосх, rспад - расстояния до цели определенные на предыдущем цикле измерений, с учетом радиальной скорости цели νr, определенной на предыдущем цикле измерений. Причем, если на периоде модуляции Tмод сначала используется ветвь возрастания частоты, а затем ветвь снижения частоты, то rвосх=r+νrTвыч, а rспад=r+νr(Tмод/2+Твыч), если же на периоде модуляции Tмод сначала используется ветвь снижения частоты, а затем ветвь возрастания частоты, то rспад=r+νrTвыч, а rвосх=r+νr(Tмод/2+Твыч);
Твыч - время выполнения вычисления скорости и расстояния.
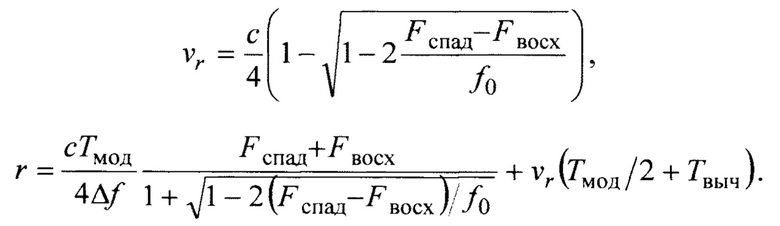
Скорость цели νr и расстояние до нее r вычисляют по измеренным разностным частотам Fвосх и Fспад, по выражениям
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявляемого изобретения, позволяет установить, что заявителем не обнаружены технические решения, характеризующиеся признаками, идентичными всем существенным признакам заявленного изобретения. Определение из перечня выявленных аналогов прототипа способа позволило выявить совокупность существенных (по отношению к усматриваемому заявителем техническому результату) отличительных признаков в заявляемых объектах, изложенных в формуле изобретения. Следовательно, заявляемое техническое решение соответствует требованию "новизна" по действующему законодательству. Сведений об известности отличительных признаков в совокупностях признаков известных технических решений с достижением такого же, как у заявленного способа, положительного эффекта не имеется. На основании этого сделан вывод о том, что предлагаемое техническое решение соответствует критерию "изобретательский уровень".
Сопоставление признаков известного и предлагаемого способов для анализа изобретательского уровня показывает существенное отличие условий, режимов осуществления действий над электрическими сигналами.
Кроме того, условия и режимы осуществления совокупности действий взаимосвязаны с измеряемыми расстояниями и радиальными скоростями зондируемых объектов.
Эти отличия приводят к появлению качественно новых свойств заявленного способа - возможности точного измерения расстояний до цели и ее скорости, как при искажении сигналов ПЧМ из-за подвижности цели, так и при одновременном искажении сигналов ПАМ и ПЧМ.
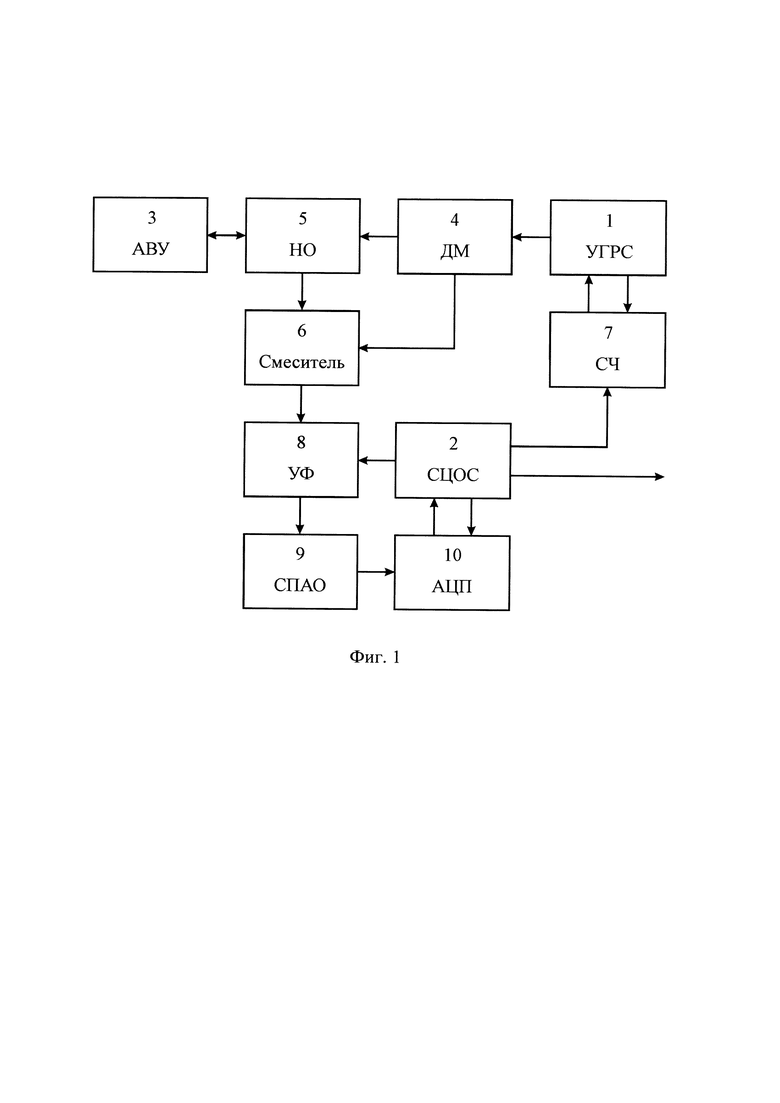
Сущность предлагаемого способа поясняется с помощью одного из возможных радиолокационных дальномеров, схематично изображенного на фиг. 1 и спектрами, изображенными на фиг. 2.
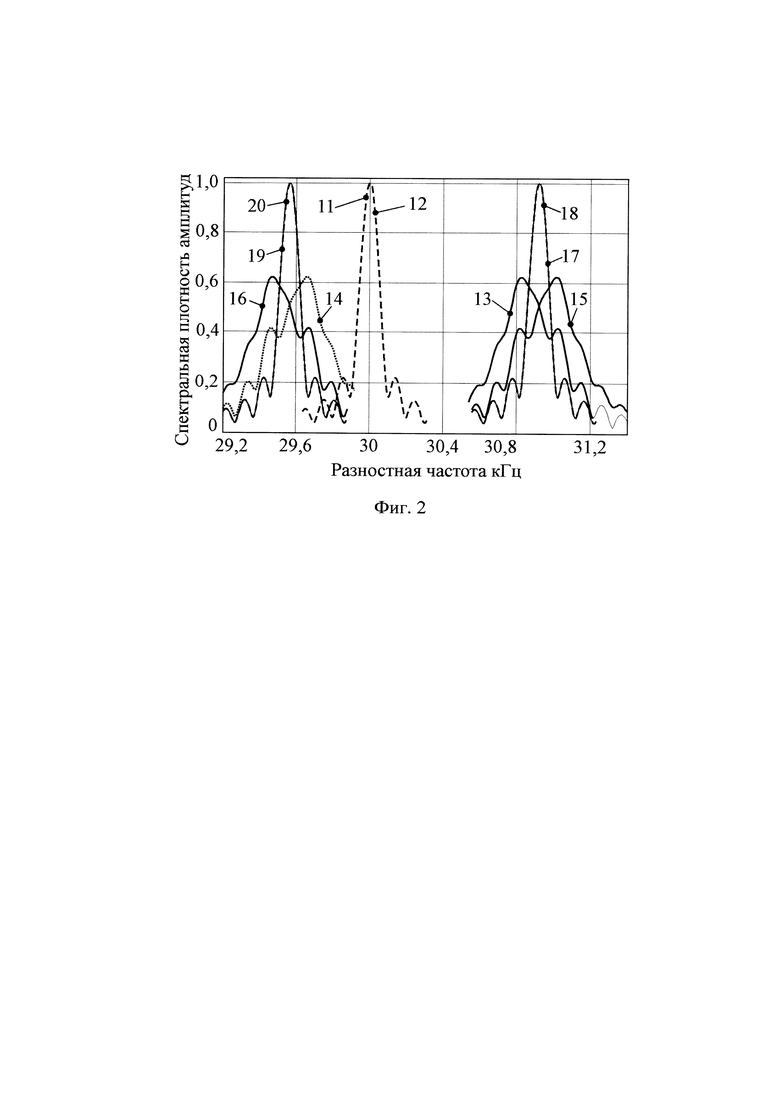
На фиг. 2 изображены спектры сигнала в положительной области частот при линейном законе частотной модуляции и при законе частотной модуляции ƒвосх(t) и ƒспад(t) ƒ(t).
Радиодальномер с частотной модуляцией зондирующих радиоволн (фиг. 1) содержит: управляемый генератор радиочастотного сигнала (УГРС) 1 с одним входом и двумя выходами, схему цифровой обработки сигналов (СЦОС) 2 с четырьмя выходами и одним входом, антенно-волноводное устройство (АВУ) 3, делитель мощности (ДМ) 4 с одним входом и двумя выходами, направленный ответвитель (НО) 5 с одним входом и двумя выходами, смеситель 6 с двумя входами и одним выходом, синтезатор частоты (СЧ) 7 с одним выходом и двумя входами, управляемый фильтр (УФ) 8 с двумя входами и одним выходом, схему предварительной аналоговой обработки (СПАО) 9, аналого-цифровой преобразователь (АЦП) 10 с двумя входами и одним выходом.
Выход СЧ 7 соединен с входом УГРС 1. Входы СЧ 7 соединены, соответственно, с первым выходом УГРС 1 и с первым выходом СЦОС 2. Второй выход УГРС 1 соединен с последовательно соединенными ДМ 4 и НО 5, а первый выход НО 5 соединен с АВУ 3. Вторые выходы ДМ 4 и НО 5 соединены, соответственно, с первым и вторым входами смесителя 6, выход которого соединен с первым входом УФ 8. Выход УФ 8 соединен с последовательно соединенными СПАО 9 и АЦП 10, а выход АЦП 10 и его второй вход соединены, соответственно, с первым входом и вторым выходом СЦОС 2. Третий выход СЦОС 2 соединен со вторым входом УФ 8, а четвертый выход является информационным выходом радиодальномера.
Антенна АВУ 3 может быть выполнена, например, в виде осесимметричного конического рупора.
Управляемый фильтр 8 может быть выполнен, например, в виде известного фильтра с цифровым управлением [5, стр. 149-150].
Практическая реализация устройства не представляет собой сложности и осуществляется на основе широко распространенных электронных элементов, например, производимых фирмами «ANALOG DEVICES», «MOTOROLA», «MICRONETICS», «PEREGRINE» «HETTAIT» и др.
Часть генерируемого радиочастотного сигнала с периодической частотной модуляцией с известными значениями начальной ƒ0 и конечной частот, диапазона частотной модуляции Δƒ, периода модуляции Tмод с ветвью возрастания частоты (восходящей ветвью) длительностью Tмод/2 и ветвью снижения частоты (спадающей ветвью) длительностью Tмод/2, от УГРС 1 (фиг. 1), управляемого СЧ 7, через ДМ 4 и НО 5 поступает в антенну АВУ 3, которая формирует направленное излучение в направлении цели. После отражения от цели эховолны принимаются антенной АВУ 3 и преобразуются в отраженный сигнал, который через НО 5 поступает на второй вход смесителя 6. В качестве гетеродинного используют выделенную ДМ 4 часть генерируемого сигнала. Выходной сигнал смесителя фильтруется управляемым фильтром 8 и с первого выхода поступает на вход СПАО 9, где обрабатывается путем заданного усиления и дополнительного подавления высокочастотных составляющих. В результате на восходящей и спадающей ветвях модулируемой частоты выделяются низкочастотные составляющие результирующего сигнала, из которых выделяются информационные составляющие СРЧ u(t), содержащие информацию о расстоянии до цели и ее скорости. Информационные составляющие СРЧ u(t) полученные на двух ветвях диапазона модуляции используют для расчета расстояния и скорости цели.
Информационные составляющие СРЧ u(t) последовательно полученные на двух ветвях диапазона модуляции через АЦП 10 поступают на вход СЦОС 2. С применением СЦОС 2 выполняют все действия над СРЧ, управляют синтезатором СЧ 7 и УФ 8 заданием кодов дискретных частот и синхронизируют работу АЦП 10.
По цифровым отсчетам СРЧ с помощью СЦОС 2 вычисляют спектры СРЧ полученные на двух ветвях диапазона модуляции, их центральные частоты Fвосх и Fспад, например, по частотам максимумов спектров, и записывают в память СЦОС 2. Спектры СРЧ искажены из-за совместного влияния ПЧМ и ПАМ. Центральные частоты Fвосх и Fспад смещены как из-за смещения частоты отраженных радиоволн относительно зондирующих на величину Допплеровской частоты ƒдоп (ƒдоп=-ƒзонд2νr/с ≈ -ƒ(t)2νr/c), так и из-за искажения спектров СРЧ из-за одновременного влияния ПЧМ и ПАМ.
Используя, записанные в памяти СЦОС 2 центральные частоты спектров Fвосх и Fспад вычисляют радиальную скорость цели νr
и расстояние до нее после окончания периода модуляции Tмод и известного времени выполнения вычисления скорости и расстояния Tвыч

Вычисляют законы генерации ЧМ сигнала для восходящей ветви ЧМ в соответствии с выражением

а для спадающей ветви ЧМ в соответствии с выражением

Кодами, соответствующими цифровым отсчетам частот ƒвосх(t) и ƒспад(t) с первого из выходов СЦОС 2 управляют синтезатором частоты СЧ 7, с помощью которого устанавливается частота генерации УГРС 1 близкая к ƒвосх(t) и ƒспад(t), а с третьего из выходов управляют управляемым фильтром УФ 8. С законом ЧМ ƒвосх(t) и ƒспад(t), генерируют зондирующий сигнал, смешивают часть генерируемого и принятый сигналы, выделяют низкочастотные составляющие результирующего сигнала, выделяют из них СРЧ, соответствующий отражению от цели и измеряют разностные частоты Fвосх и Fспад, соответственно, на восходящей и спадающей ветвях диапазона ЧМ. Новые значения скорости цели νr и расстояния до нее r вычисляют по вычисленным разностным частотам Fвосх и Fспад. Вычисленные скорость цели νr и расстояние до нее r используют в следующем цикле измерений.
Искажения спектра СРЧ S(x), обусловленные ПЧМ и ПАМ, иллюстрируются на фиг. 2, где для наглядности показаны нормированные спектральные плотности амплитуд (СПА) СРЧ вычисленные по интегральному преобразованию Фурье. При расчетах использованы: Tмод/2=0,01 секунды, минимальная частота диапазона ЧМ ƒ0=8,5 ГГц, диапазон ЧМ Δƒ=3 ГГц. Паразитная амплитудная модуляция СРЧ задана в виде U(t)=u[1+m⋅cos(2πkt/Tмод+ψ)], где m=0,35, k=0,25, ψ=0 или ψ=π. СПА нормированы к амплитудным значениям СПА 11 и 12 сигналов разностных частот, не искаженных ПЧМ, которые получены от неподвижной цели на двух ветвях диапазона ЧМ. СПА 13, 15 и 14, 16 рассчитаны, соответственно, на восходящей и спадающей ветвях диапазона ЧМ для цели, движущейся на начальном расстоянии r=15 метров с радиальной скоростью 12 метров в секунду. При этом для СПА 13 и 16 ψ=0, а для СПА 14 и 15 ψ=π. Искажения формы СРЧ приводят к погрешности оценок центральных частот СПА СРЧ как на восходящей Fвосх, так и на спадающей ветвях диапазона ЧМ Fспад. В частности, для СПА 13, 14, 15, 16 при оценке частоты по максимуму СПА погрешность оценки частоты, как на восходящей Fвосх, так и на спадающей ветвях диапазона ЧМ Fспад составляет от ±96 Гц до ±98 Гц. Погрешность оценки радиальной скорости при использовании СПА 13, 14 составляет минус 1,7 метра в секунду, а погрешность оценки расстояния составляет минус 17 миллиметров. При использовании СПА 15, 16 погрешность оценки радиальной скорости составляет плюс 1,7 метра в секунду, а погрешность оценки расстояния составляет плюс 17 миллиметров.
При осуществлении предлагаемого способа искажения СПА СРЧ как на восходящей, так и на спадающей ветвях диапазона ЧМ практически отсутствуют (СПА, соответственно, 17, 19 и 18, 20 на фиг. 2), погрешности оценки частоты, Fвосх и Fспад определяются только отношением сигнал-шум, которое для измеряемых расстояний в десятки метров может составлять от 20 до 30 дБ. В этом случае погрешность измерения расстояния менее 5 миллиметров, а погрешность измерения радиальной скорости снижается до 0,01 метров в секунду. В приведенном примере погрешность измерения расстояния снижается в 4÷20 раз, погрешность измерения радиальной скорости снижается в 170 раз.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ №2255352. Способ измерения скоростей и координат объектов. Опубл. 27.06.2005.
2. Патент РФ №2416807. Способ для радиолокационного измерения скоростей и координат объектов и система для его осуществления. Опубл. 20.04.2011.
3. Патент РФ 2444758 Способ определения количества, скорости и дальности целей и амплитуд отраженных от них сигналов по ответному сигналу в цифровом канале радиолокатора.
4. Теоретические основы радиолокации. Под редакцией Ширмана Я.Д. Учебное пособие для вузов. М., изд-во «Советское радио», 1970, стр. 560.
5. А. Дж. Пейтон, В. Волш. Аналоговая электроника на операционных усилителях. (Пер. с англ.): М.: БИНОМ, 1994. 352 с.
Изобретение относится к области измерительной техники, в частности к измерению расстояния и скорости в частотной радиолокации. Техническим результатом является повышение точности измерения за счет уменьшения влияния паразитной частотной модуляции (ПЧМ) и паразитной амплитудной модуляции (ПАМ) сигнала разностной частоты (СРЧ) при увеличении диапазона частотной модуляции. Заявленный способ измерения расстояния и радиальной скорости заключается в итерационном процессе определения необходимого закона частотной модуляции генерируемого сигнала. В результате многократных оценок радиальной скорости и расстояния закон частотной модуляции генерируемого сигнала подбирается таким, чтобы в СРЧ уменьшился уровень ПЧМ, при этом независимо от формы ПАМ СРЧ исключаются искажения основного лепестка спектра СРЧ и снижаются погрешности измерения радиальной скорости зондируемого объекта и расстояния до него. 2 ил.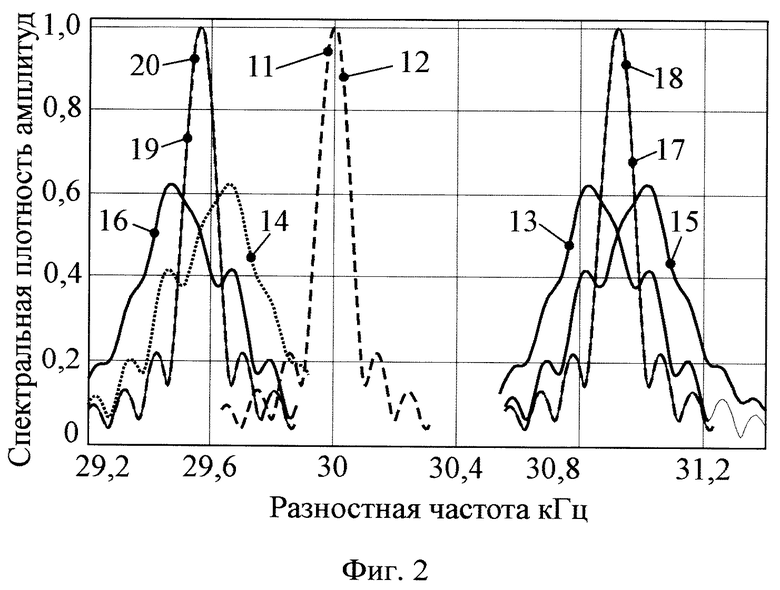
Способ измерения расстояния и радиальной скорости радиолокатором с периодической симметричной пилообразной частотной модуляцией (ЧМ) зондирующих радиоволн, цикл которого включает: генерирование радиочастотного сигнала с периодической частотной модуляцией с известными значениями минимальной ƒ0 частоты, диапазона ЧМ Δƒ, периода модуляции Tмод с ветвью возрастания частоты (восходящей ветвью) длительностью Tмод/2 и ветвью снижения частоты (спадающей ветвью) длительностью Tмод/2, формирование и излучение радиоволн в направлении цели, выделение части генерируемого радиочастотного сигнала, прием, спустя время распространения, эховолн и формирование из них отраженного сигнала, смешивание его с выделенной частью генерируемого радиочастотного сигнала, выделение низкочастотных составляющих результирующего сигнала и выделение из них сигнала разностной частоты (СРЧ), содержащего информацию о расстоянии до цели и ее радиальной скорости, измерение разностных частот Fвосх и Fспад, соответственно на восходящей и спадающей ветвях диапазона ЧМ, вычисление расстояния r до цели и ее радиальной скорости νr по известным скорости распространения радиоволн и разностным частотам СРЧ на восходящей Fвосх и спадающей Fспад ветвях диапазона ЧМ, отличающийся тем, что в каждом цикле измерений по результату выполненного измерения расстояния r до цели и ее радиальной скорости νr, изменяют закон ЧМ и используют его в следующем цикле измерения расстояния до цели и ее радиальной скорости, при этом зондирующий сигнал генерируют с законом ЧМ для восходящей ветви ЧМ в соответствии с выражением

а для спадающей ветви ЧМ в соответствии с выражением

где ƒвосх(t) и ƒспад(t) - частоты генерируемого сигнала, соответственно на восходящей и спадающей ветвях;
ƒ0 - минимальная частота диапазона ЧМ;
Δƒ - диапазон ЧМ;
Tмод - период модуляции;
t - текущее время внутри одной ветви (восходящей или спадающей) периода модуляции;
νr - радиальная скорость цели, определенная на выполненном цикле измерений;
rвосх, rспад - расстояния до цели, определенные на предыдущем цикле измерений, с учетом радиальной скорости цели νr, определенной на предыдущем цикле измерений, причем если на периоде модуляции Tмод сначала используется ветвь возрастания частоты, а затем ветвь снижения частоты, то rвосх=r+νrTвыч, а rспад=r+νr(Tмод/2+Твыч), если на периоде модуляции Tмод сначала используется ветвь снижения частоты, а затем ветвь возрастания частоты, то rспад=r+νrTвыч, а rвосх=r+νr(Tмод/2+Твыч);
Tвыч - время выполнения вычисления скорости и расстояния,
при этом скорость цели νr и расстояние до нее r вычисляют по измеренным разностным частотам Fвосх и Fспад, по выражениям
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩИХ РАДИОВОЛН (ВАРИАНТЫ) | 2010 |
|
RU2423723C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА НА ОСНОВЕ ЧМ ЛОКАТОРА | 2014 |
|
RU2567866C2 |
| Теоретические основы радиолокации | |||
| Под редакцией Ширмана Я.Д | |||
| Учебное пособие для вузов | |||
| М., изд-во "Советское радио", 1970, 560 с., сс | |||
| Станок для нарезания зубьев на гребнях | 1921 |
|
SU365A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2017 |
|
RU2654215C1 |
| СПОСОБ ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2416807C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2017 |
|
RU2661488C1 |
| US 6072422 A, 06.06.2000 | |||
| ПОЛИМЕРИЗАТОР ДЛЯ ПОЛУЧЕНИЯ СИНТЕТИЧЕСКИХКАУЧУКОВ | 0 |
|
SU231529A1 |
| JP 2001033545 | |||

