Изобретение относится к области радиотехнической разведки и может быть использовано для определения местоположения наземного радиоизлучающего источника фазовым пеленгатором с двумя ненаправленными антеннами, размещенными на коптере.
При применении фазового метода пеленгации в одной плоскости, например в азимутальной, необходимы минимум две антенны, разнесенные на расстояние L, называемое базой [Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: Сов. радио, 1975. 336 с: ил., стр. 91-93]. Способ основан на том, что за счет разноса антенн принимаемые ими сигналы различаются по фазе. Разность фаз равна  где λ - длина волны принимаемого сигнала, L - размер базы, θ - угол между нормалью к базе и направлением принимаемого излучения. Это дает возможность определить угол θ по измеренной величине разности фаз. Для определения местоположения источника требуется его пеленгация в двух ортогональных плоскостях, для чего необходима еще одна пара антенн, разнесенных в угломестной плоскости, что не всегда может быть технически реализуемо на летательном аппарате и является недостатком рассмотренного способа пеленгации.
где λ - длина волны принимаемого сигнала, L - размер базы, θ - угол между нормалью к базе и направлением принимаемого излучения. Это дает возможность определить угол θ по измеренной величине разности фаз. Для определения местоположения источника требуется его пеленгация в двух ортогональных плоскостях, для чего необходима еще одна пара антенн, разнесенных в угломестной плоскости, что не всегда может быть технически реализуемо на летательном аппарате и является недостатком рассмотренного способа пеленгации.
Известен способ определения местоположения источника излучения (ИИ) фазовым пеленгатором [Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: «Сов. радио», 1970. С. 7-9, 20-22]. Местоположение ИИ определяется путем измерения направлений на него в азимутальной и угломестной плоскостях двумя перпендикулярно расположенными фазированными антенными постами и использования информации о высоте полета. Определение направления на ИИ в одной плоскости заключается в приеме радиосигналов от ИИ на две направленные антенны, разнесенные в данной плоскости на расстояние, называемое базой. Принятые сигналы после сдвига фазы одного из них на π/2 перемножаются. Поворотом антенн до тех пор, пока сигнал на выходе умножителя не будет равен нулю, определяют направление на источник излучения в данной плоскости.
Применение направленных антенн позволяет исключить ложное определение направления на зеркальный источник излучения с противоположной тыльной стороны, но увеличивает их массогабаритные характеристики, что затрудняет их использование на малых «беспилотниках» типа коптера. На них целесообразно применять малогабаритные легкие ненаправленные антенны, например, типа полуволнового вибратора. Кроме того, возникают технические трудности с размещением разнесенных антенн в угломестной плоскости, решение которых связано с дополнительными финансовыми затратами.
Поэтому недостатками способа являются отсутствие возможности селекции истинного направления на источник излучения в азимутальной плоскости от зеркального при использовании двух ненаправленных антенн, а также определения местоположения источника излучения при отсутствии антенн, разнесенных в угломестной плоскости.
Наиболее близким по сущности и достигаемому результату (прототипом) является способ определения местоположения источника излучения, которая заключается в определении направления на источник излучения фазовым пеленгатором на квадрокоптере [Патент РФ №2792039, опубл. 16.03.2023, бюл. 8] в азимутальной плоскости. При этом для определения местоположения ИИ необходимо пеленгатор дополнить двумя разнесенными в угломестной плоскости антеннами и измерить высоту полета. Определение направления на ИИ в азимутальной плоскости заключается в приеме сигнала ИИ фазовым пеленгатором с двумя ненаправленными антеннами, установленными на квадрокоптере симметрично его строительной оси, переводе квадрокоптера в режим зависания с последующим вращением вокруг своей оси и измерением уровня сигнала на выходе умножителя, на вход которого поступают принимаемые антеннами сигнал ИИ. По максимальным значениям сигнала на выходе умножителя определяют истинный или зеркальный азимут источника излучения. Дополнительно для их селекции вращают квадрокоптер вокруг своей оси до достижения ближайшего к максимальному нулевого значения сигнала на выходе умножителя, выполняют прямолинейный горизонтальный полет квадрокоптера в направлении, перпендикулярном базе пеленгатора. Если при этом сигнал на выходе умножителя убывает, то принимают решение, что ИИ находится в направлении движения, если возрастает - то в противоположном.
Недостатками способа являются то, что для селекции истинного направления на ИИ от ложного (зеркального) дополнительно выполняют достаточно продолжительный прямолинейный полет, так как сигнал на выходе умножителя меняется очень медленно, а для определения местоположения ИИ необходимо пеленгатор дополнить двумя разнесенными в угломестной плоскости антеннами.
Техническим результатом изобретения является возможность селекции истинного направления на источник излучения в азимутальной плоскости от ложного и определения его местоположения за счет выполнения коптером кругового полета в азимутальной плоскости с максимально возможным креном.
Указанный результат достигается тем, что в известном способе определения местоположения наземного источника излучения фазовым пеленгатором на коптере:
принимают сигнал источника излучения двумя ненаправленными антеннами, установленными на носителе симметрично его строительной оси на расстоянии, именуемом базой;
перемножают принятые антеннами сигналы в умножителе;
переводят носитель в режим зависания, после чего вращают его вокруг строительной оси с измерением уровня сигнала на выходе умножителя до достижения максимального значения;
согласно изобретению
прием сигнала источника излучения осуществляют антеннами, размещенными слева и справа от продольной оси коптера;
после обнаружения сигнала, измерения длины волны принимаемых сигналов и определения истинного или ложного азимута источника излучения переводят коптер в горизонтальный полет по окружности с максимально возможным креном;
при этом измеряют уровень сигнала на выходе умножителя, угол крена и высоту полета коптера;
если при полете коптера сигнал на выходе умножителя снижается до глобального минимума, то принимают решение, что в начальный момент полет осуществлялся в направлении истинного азимута источника излучения, а если до локального минимума - то в направлении зеркального;
пересчитывают измеренные значения сигнала на выходе умножителя в угловые и по максимальным значениям с учетом угла крена определяют угол места источника излучения;
по измеренной высоте горизонтального полета коптера, а также найденным значениям истинного азимута и угла места источника излучения определяют его местоположение относительно коптера.
Сущность изобретения заключается в следующем.
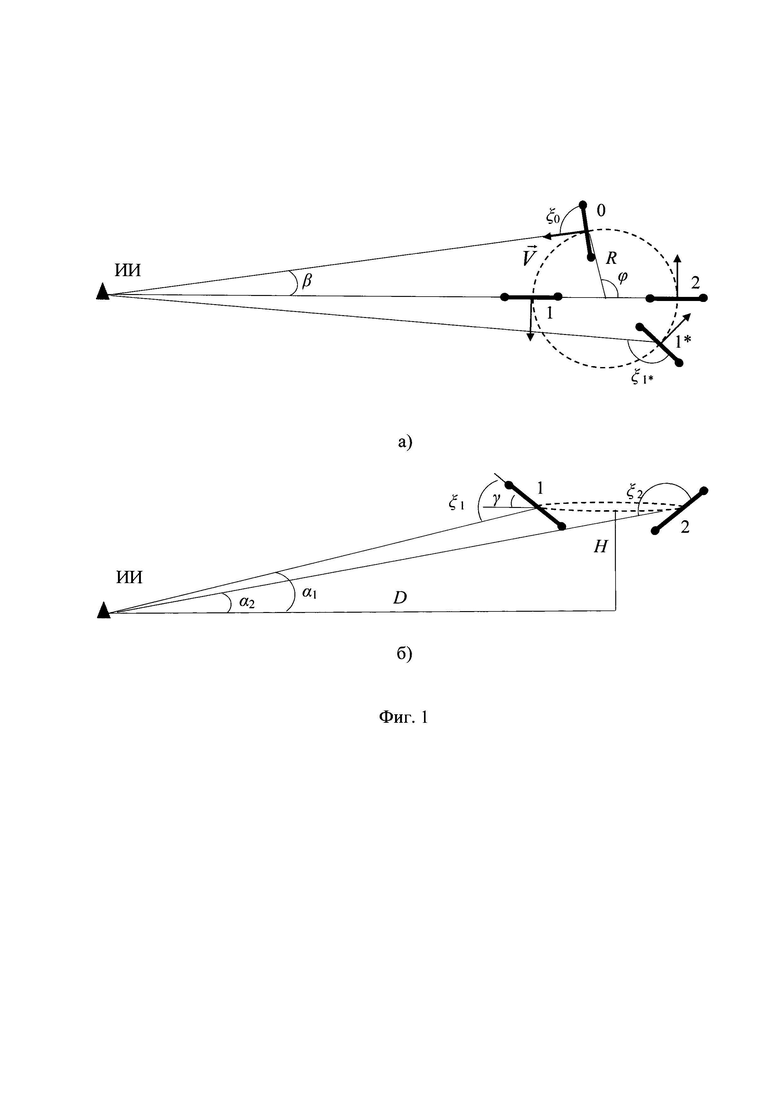
На фиг. 1 представлена схема реализации предлагаемого способа определения местоположения наземного источника излучения фазовым пеленгатором на коптере. На фиг. 1а) представлена схема расположения коптера и ИИ, как вид сверху, а на фиг. 1б) - вид сбоку.
На фигурах обозначены:
ИИ - местоположение наземного источника излучения; 0, 1, 1*, 2 - точки местоположения коптера при полете по окружности с максимально возможным креном и соответствующие им углы «Правая антенна - Центр базы - ИИ» ξ0, ξ1, ξ1*, ξ2; α1, α2 - углы места с ИИ на коптер (углы места ИИ с коптера) в точках 1, 2, соответственно; D - дальность до ИИ от центра окружности с радиусом R; Н,  у - высота, вектор скорости полета и угол крена коптера; ϕ - угол разворота коптера относительно линии «ИИ - центр окружности».
у - высота, вектор скорости полета и угол крена коптера; ϕ - угол разворота коптера относительно линии «ИИ - центр окружности».
Для определения угла места ИИ фазовым пеленгатором необходимы антенны, которые разнесены в угломестной плоскости, или выполнение максимального крена коптера с антеннами, расположенными симметрично относительно его вертикальной оси (справа и слева относительно продольной оси коптера). Однако выполнение крена приводит к смещению носителя в сторону с последующей потерей высоты. Для устранения этого предлагается осуществлять полет по окружности с таким радиусом, при котором крен будет максимально возможным, а сам полет - горизонтальным. Так как углы места в точках максимального и минимального удалений носителя при полете по окружности от ИИ будут различны, то это позволяет дополнительно отселектировать истинный азимут ИИ от зеркального.
Например, когда коптер будет находиться на линии «ИИ - Центр окружности» в максимальном приближении к ИИ (точка 1 на фиг. 1), измеренный сигнал на выходе умножителя будет иметь самое минимальное значение, что позволяет определить истинное направление на ИИ. Кроме того, после пересчета измеренных сигналов с выхода умножителя в угловые (угол «Перпендикуляр к базе - Центр базы - ИИ») они, в зависимости от того находится коптер дальше или ближе к ИИ, за вычетом угла крена будут равны углу места ИИ.
Если необходимо, то коптер снова можно перевести в режим зависания без крена и уточнить азимут ИИ как в способе-прототипе.
Оценим, как влияет изменение угла в на значение сигнала на выходе умножителя при полете коптера с фазовым пеленгатором. Сигнал на выходе фазового детектора, выполняющего операции умножения и усреднения входных сигналов имеет вид [Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. 2-е издание, перераб. и доп. М.: Радио и связь, 1984, 312 с. С. 68]:

где K - коэффициент передачи фазового детектора; U - порог ограничения по амплитуде; L - размер базы (расстояние между антеннами); λ - длина волны принимаемого сигнала.
Чтобы определить, как будет меняться угол в при полете по окружности, представим вектор «ИИ - Коптер» в виде [Бронштейн И.Н. и Семендяев К.А. Справочник по математике. М.: Наука, 1964, 608 с. С. 521]

где скаляры Ах, Ay, Az декартовые координаты вектора в системе  которые при полете коптера по окружности изменяются во времени
которые при полете коптера по окружности изменяются во времени

Вектор «Центр базы - Правая антенна» представим в виде

где скаляры Вх, By, Bz при полете по окружности изменяются во времени  L - размер базы;
L - размер базы;  . Тогда угол между векторами
. Тогда угол между векторами  изменяется во времени по формуле [Бронштейн И.Н. и Семендяев К.А. Справочник по математике. М.: Наука, 1964, 608 с. С. 226]
изменяется во времени по формуле [Бронштейн И.Н. и Семендяев К.А. Справочник по математике. М.: Наука, 1964, 608 с. С. 226]

а угол между нормалью к базе и ИИ относительно центра базы -

Для оценки предлагаемого способа было проведено моделирование процесса полета коптера по окружности с измерением пеленгов ИИ. При этом в начальный момент принято, что при обнаружении сигнала ИИ коптер был переведен в режим зависания и поворотом вокруг строительной оси зафиксирован в таком положении (точка 0 на фиг. 1, ξ0 (t)=90°, θ0 (t)=0°), когда сигнал на выходе умножителя максимальный, то есть пеленг ИИ равен нулю и ИИ находится впереди по курсу (истинный ИИ) или в противоположном направлении (впереди ложный ИИ).
Для селекции истинного азимута ИИ и определения его угла места коптер переводят в режим горизонтального полета по окружности с максимально возможным углом крена.
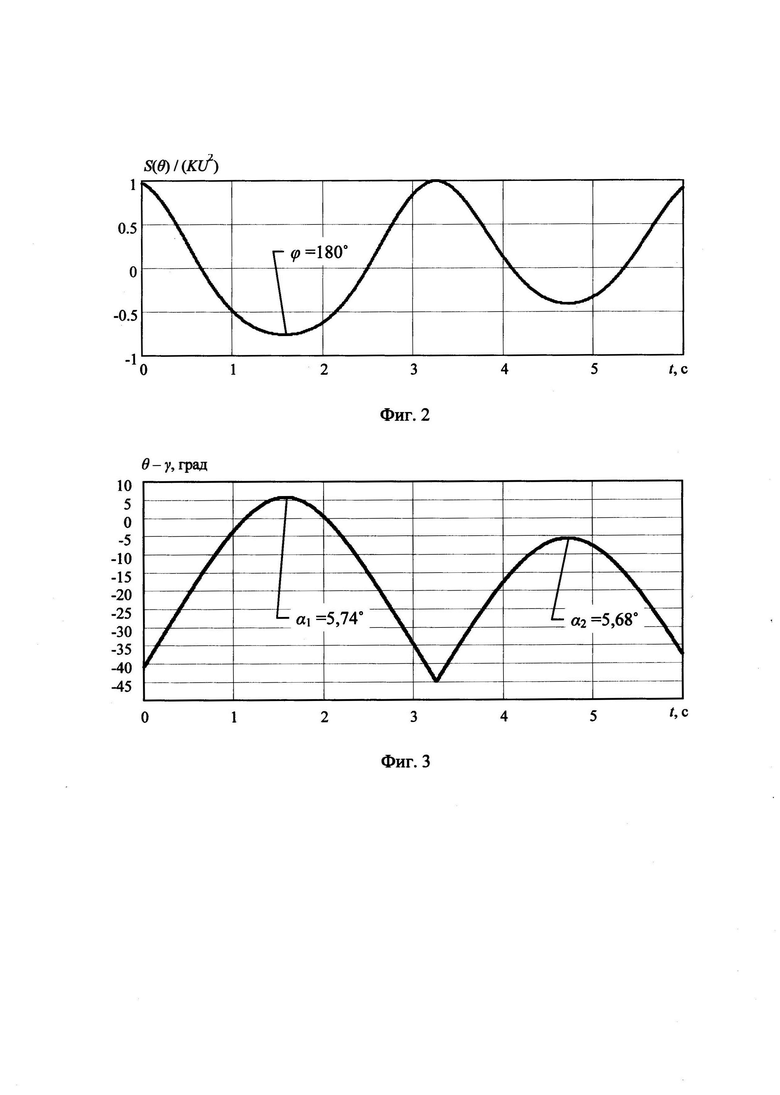
Нормированная зависимость сигнала на выходе фазового детектора (1) от времени полета коптера по окружности с началом в точке 0 (фиг. 1), показана на фиг. 2. При этом были приняты следующие исходные данные:
истинный ИИ находится впереди;
дальность от ИИ до центра окружности - D=1000 м;
высота и скорость полета коптера -Н=100 м, V=5 м/с;
угол крена коптера - γ=45°;
радиус окружности - R=5 м;
отношение базы к длине волны - L/λ=0,5.
Из зависимости, представленной на фиг. 2, видно, что она имеет минимальные значения при t ≈ 1,6; 4,7 с, что соответствует времени полета коптера, когда наземный ИИ будет находиться сначала справа (точка 1 фиг. 1), а потом слева от него (точка 2, фиг. 1). При этом в точке 2 сигнал на выходе умножителя будет иметь наименьшее из всех значение, то есть можно определить истинное направление на ИИ.
Пересчитанные сигналы с выхода умножителя (1) в угловые значения за вычетом угла крена представлены на фиг. 3. Из зависимости, показанной на фиг. 3, видно, что в точках 1 и 2 (фиг. 1) значения пересчитанных углов по модулю равны значениям угла места ИИ. Так в точке максимального приближения α1=5,74°, а в точке максимального удаления α2=5,68°.
При необходимости уточнения азимута ИИ дополнительно переводят коптер в режим зависания и поворотом вокруг строительной оси добиваются максимального значения сигнала на выходе умножителя.
Из вышесказанного следует, что технический результат, а именно возможность определения истинного направления на наземный ИИ в азимутальной плоскости и его местоположения достигается за счет выполнения горизонтального полета коптером по окружности с максимально возможным креном.
Способ определения местоположения наземного источника излучения фазовым пеленгатором на коптере может быть реализован с использованием известных устройств: ненаправленных антенн в виде полу волнового вибратора, SDR приемника типа RTK2832, на выходе которого принятый сигнал будет в цифровом виде, микроконтроллера типа PICX16F62X, в котором можно реализовать операции умножения сигналов и вычисления угла прихода сигнала от источника излучения. Угловое положение коптера в пространстве и вектор скорости могут быть определены серийно установленными на коптер компасом и бесплатформенной инерциальной навигационной системой, а высота - баровысотомером или ультразвуковым высотомером.
Таким образом, предлагаемый способ определения местоположения наземного источника излучения фазовым пеленгатором на коптере позволяет осуществить селекцию истинного направления на источник излучения в азимутальной плоскости от ложного и определить его местоположение за счет выполнения коптером кругового полета в азимутальной плоскости с максимально возможным креном.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КВАДРОКОПТЕРЕ | 2021 |
|
RU2792039C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2760975C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ С САМОЛЕТА, ОСНАЩЕННОГО АЗИМУТАЛЬНЫМ ФАЗОВЫМ ПЕЛЕНГАТОРОМ | 2022 |
|
RU2796121C1 |
| КИНЕМАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2023 |
|
RU2825200C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ | 2023 |
|
RU2812273C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ С САМОЛЕТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2809745C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА САМОЛЕТА | 2021 |
|
RU2777147C1 |
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
Изобретение относится к области радиотехнической разведки и может быть использовано для определения местоположения наземного радиоизлучающего источника. Техническим результатом является обеспечение селекции истинного направления на источник излучения в азимутальной плоскости от ложного и определение его местоположения за счет выполнения коптером кругового полета в азимутальной плоскости с максимально возможным креном. Упомянутый результат достигается тем, что в способе определения местоположения наземного источника излучения фазовым пеленгатором на коптере, основанном на приеме сигнала источника излучения двумя ненаправленными антеннами, прием сигнала источника излучения осуществляют антеннами, размещенными слева и справа от продольной оси коптера, после обнаружения сигнала, измерения длины волны принимаемых сигналов и определения истинного или ложного азимута источника излучения коптер переводят в горизонтальный полет по окружности с максимально возможным креном, при этом измеряют уровень сигнала на выходе умножителя, угол крена и высоту полета коптера, если при полете коптера сигнал на выходе умножителя снижается до глобального минимума, то принимают решение, что в начальный момент полет осуществлялся в направлении истинного азимута источника излучения, а если до локального минимума - то в направлении зеркального, пересчитывают измеренные значения сигнала на выходе умножителя в угловые и по максимальным значениям с учетом угла крена определяют угол места источника излучения, по измеренной высоте горизонтального полета коптера, а также найденным значениям истинного азимута и угла места источника излучения определяют его местоположение относительно коптера. 3 ил.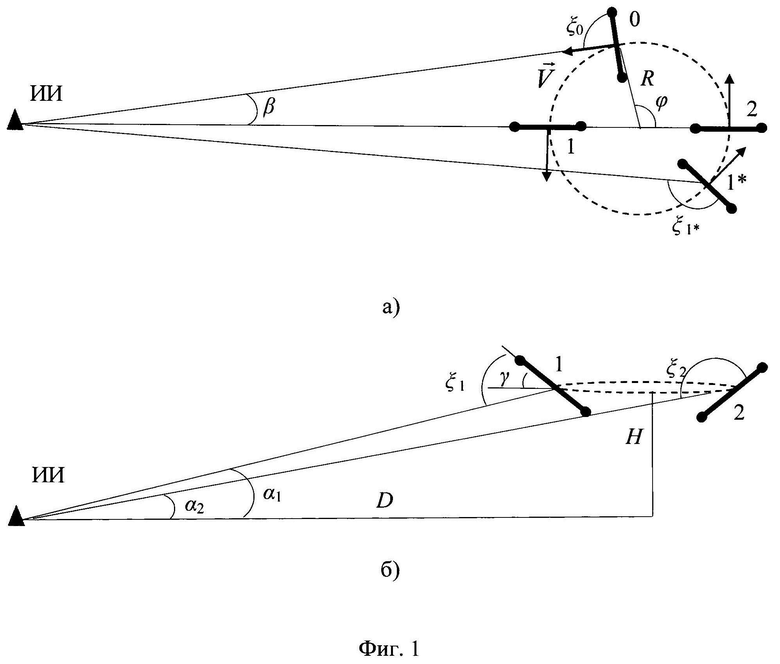
Способ определения местоположения наземного источника излучения фазовым пеленгатором на коптере, основанный на приеме сигнала источника излучения двумя ненаправленными антеннами, установленными на носителе симметрично его строительной оси на расстоянии, именуемом базой, перемножении принятых антеннами сигналов в умножителе, переводе носителя в режим зависания и вращения его вокруг строительной оси с измерением уровня сигнала на выходе умножителя до достижения максимального значения, отличающийся тем, что прием сигнала источника излучения осуществляют антеннами, размещенными слева и справа от продольной оси коптера, после обнаружения сигнала, измерения длины волны принимаемых сигналов и определения истинного или ложного азимута источника излучения коптер переводят в горизонтальный полет по окружности с максимально возможным креном, при этом измеряют уровень сигнала на выходе умножителя, угол крена и высоту полета коптера, если при полете коптера сигнал на выходе умножителя снижается до глобального минимума, то принимают решение, что в начальный момент полет осуществлялся в направлении истинного азимута источника излучения, а если до локального минимума - то в направлении зеркального, пересчитывают измеренные значения сигнала на выходе умножителя в угловые и по максимальным значениям с учетом угла крена определяют угол места источника излучения, по измеренной высоте горизонтального полета коптера, а также найденным значениям истинного азимута и угла места источника излучения определяют его местоположение относительно коптера.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КВАДРОКОПТЕРЕ | 2021 |
|
RU2792039C2 |
| СПОСОБ ПЕЛЕНГАЦИИ ИЗЛУЧАЮЩЕГО ОБЪЕКТА В ФАЗОВЫХ МНОГОШКАЛЬНЫХ УГЛОМЕРНЫХ СИСТЕМАХ | 2022 |
|
RU2786495C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ С САМОЛЕТА, ОСНАЩЕННОГО АЗИМУТАЛЬНЫМ ФАЗОВЫМ ПЕЛЕНГАТОРОМ | 2022 |
|
RU2796121C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ | 2023 |
|
RU2812273C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2020 |
|
RU2739486C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2760975C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата | 2016 |
|
RU2610150C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| Азаров А.В | |||
| и др | |||
| Синтез малогабаритного фазового пеленгатора авиационного базирования // Труды МАИ | |||

