Предложенная группа технических решений относится к классу способов и систем управления ракетами, обеспечивающими прямое попадание в цель.
Известен способ управления ракетой, состоящий в выработке электромагнитного луча, кодировании поперечного сечения луча или поля управления электромагнитными импульсами, напряженность и длительность каждой пары которых постоянна на любой концентрической, по отношению к центру луча, окружности и линейно изменяется от центра луча к краю, измерении приемным устройством ракеты их текущих значений и преобразовании в электрический сигнал, пропорциональный отклонению приемного устройства ракеты от центра поля управления, выработке сигнала управления, отклонении рулевого органа, выработке управляющей силы пропорционально отклонению рулевого органа (см. Г.Б. Белоцерковский «Основы радиолокации и радиолокационные устройства», М., «Сов. радио», 1975 г., стр.59-91, 212-242, 269-273; «Справочник по радиолокации», том 2, стр.132-207, том 4, под ред. М. Сколник, пер. с англ., под общ. ред. К.Н. Трофимова, М., «Сов. радио», 1977 г.)
Выработка электромагнитного луча, кодирование поперечного сечения луча или поля управления электромагнитными импульсами, напряженность и длительность каждой пары которых постоянна на любой концентерической, по отношению к центру луча, окружности и линейно изменяется от центра луча к краю, может осуществляться передатчиком радиолокатора, имеющим излучатель, ось которого смещена относительно оси отражателя, или фазированными антенными решетками (ФАР). ФАР состоят из небольших приемопередатчиков, расположенных рядами на полотне антенны радиолокатора. ФАР выполняют множество различных операций: определение угловых координат, дальности и скорости цели, обеспечение помехозащищенности, определение типа и размера цели и т.д. Каждая из операций, которую реализует ФАР, осуществляется определенным алгоритмом включения соответствующих приемопередатчиков. Частным случаем их включения на каждом периоде обновления информации является следующий:
- первый импульс посылается одновременно всеми приемопередатчиками;
- второй и последующие импульсы посылаются приемопередатчиками, расположенными на концентрических, по отношению к центру луча, окружностях.
Промежутки времени между первым импульсом и каждым последующим пропорциональны расстоянию между соответствующей окружностью и центром луча. Аналогом их включения является волна от камня, брошенного на поверхность пруда. ФАР имеет прямоугольную форму расположения приемопередатчиков на полотне антенны, поэтому в углах будет возникать погрешность воспроизведения круга. Погрешность можно уменьшить за счет включения в углах приемопередатчиков соседних рядов и за счет уменьшения их размеров. Приемопередатчики могут быть расположены в виде концентрических окружностей на полотне антенны. В этом случае погрешность будет равна нулю. Выбор конкретной реализации ФАР не влияет на воспроизведение операций способа управления ракетой. Последующие операции способа широко известны и присущи любому способу лучевого управления.
Основными недостатками данного способа управления являются невозможность управления ракетой при развороте электромагнитного луча по крену и низкая надежность работы.
Известна система управления ракетой, содержащая источник электромагнитного излучения, последовательно соединенные приемное устройство, координатор, блок выработки команд управления и рулевой привод (см. Г.Б. Белоцерковский «Основы радиолокации и радиолокационные устройства», М., «Сов. радио», 1975 г., стр.242-243, 269-273; Л.С. Белявский, В.С. Новиков, П.В. Оленюк «Основы радионавигации», М., «Транспорт», 1992 г., стр.43-47; В.В. Солодовников, В.Н. Плотников, А.В. Яковлев «Основы теории и элементы систем автоматического регулирования», М., «Машиностроение», 1985 г., стр.506-510). Источник электромагнитного излучения может быть как радиолокационным, так и оптическим (тепловым). В системах самонаведения используется как естественное тепловое излучение цели, так и ее лазерная подсветка. В системах лучевого наведения лазер вырабатывает оптический луч, который направляют в сторону цели. Для определения координат цели в системах самонаведения, или ракеты в системах лучевого наведения, луч модулируют модуляционными или растровыми дисками. В качестве такого диска может быть использован диск, имеющий светлую и темную части. Темная часть отделена от светлой с одной стороны радиальной линией, а с другой - линией в виде спирали Архимеда (см. В.Т. Кочетков, А.М. Половко, В.М. Пономарев «Теория систем телеуправления и самонаведения ракет» М., «Наука» 1964 г. стр.425, рис.9.10, диск №2, далее по тексту этот источник из-за неоднократного использования просто (1)). Ось вращения диска совпадает с осью луча. Приемное устройство ракеты в таком луче будет принимать сигнал, длительность которого на каждом периоде обновления информации, или периоде вращения растра, пропорциональна отклонению приемного устройства ракеты от центра луча. Принятый сигнал поступает в координатор. Координатор, используя, например, сглаживающий фильтр, преобразует длительность принимаемых импульсов в электрический сигнал, величина (напряжение) которого пропорциональна отклонению приемного устройства ракеты от оси луча. Координатор имеет также опорный генератор, частота которого совпадает с частотой вращения растра. В момент пуска ракеты синхронизируют импульсы генератора и положение радиальной линии растра, например, вертикальное. Если растр вращается, как показано в (1) на рис.9.10, то промежуток времени между опорным импульсом и началом каждого информационного импульса будет пропорционален полярному углу отклонения приемного устройства ракеты от радиуса-вектора, принятого за начало отсчета, например от вертикали. Второй сглаживающий фильтр координатора также преобразует этот импульсный сигнал в напряжение. Если ракета управляется в декартовой системе координат, то осуществляется элементарное преобразование полученных сигналов, пропорциональных радиусу-вектору и полярному углу, в прямоугольные координаты Y, Z. Далее сигналы поступают в блок выработки команд управления, осуществляющий их преобразование в соответствии с выбранным методом наведения и угловым положением ракеты по крену. В качестве устройств для этого применяют, соответственно, корректирующие фильтры и опорные гироскопы крена. Затем сформированные сигналы управления поступают на рулевой привод. Рули, отклоняясь, вызывают появление управляющей силы, обеспечивающей перемещение ракеты в центр луча.
Основными недостатками данной системы управления являются невозможность управления ракетой при развороте электромагнитного луча по крену и низкая надежность работы.
Наиболее близким к предлагаемому является способ управления ракетой, состоящий в выработке электромагнитного луча, кодировании поперечного сечения луча или поля управления электромагнитными импульсами, напряженность и длительность каждой пары которых постоянна на любой концентрической, по отношению к центру луча, окружности и линейно изменяется от центра луча к краю, измерении приемным устройством ракеты их текущих значений и преобразовании в электрический сигнал, пропорциональный отклонению приемного устройства ракеты от центра поля управления, выработке сигнала управления, отклонении рулевого органа, выработке управляющей силы пропорционально отклонению рулевого органа (см.(1) стр.345-350).
Основными недостатками данного способа правления являются невозможность управления ракетой при развороте электромагнитного луча по крену и низкая надежность работы.
Наиболее близкой к предлагаемой является система управления ракетой, содержащая источник электромагнитного излучения, последовательно соединенные приемное устройство, координатор, блок выработки команд управления и рулевой привод (см.(1) стр.388-404).
Основными недостатками данной системы управления являются невозможность управления ракетой при развороте электромагнитного луча по крену и низкая надежность работы.
Технической задачей настоящей группы изобретений является обеспечение управления ракетой при развороте электромагнитного луча по крену и повышение надежности работы.
Для достижения поставленной задачи в способ управления ракетой, состоящий в выработке электромагнитного луча, кодировании поперечного сечения луча или поля управления электромагнитными импульсами, напряженность и длительность каждой пары которых постоянна на любой концентрической, по отношению к центру луча, окружности и линейно изменяется от центра луча к краю, измерении приемным устройством ракеты их текущих значений и преобразовании в электрический сигнал, пропорциональный отклонению приемного устройства ракеты от центра поля управления, выработке сигнала управления, отклонении рулевого органа, выработке управляющей силы пропорционально отклонению рулевого органа, введено измерение углового положения приемного устройства ракеты относительно радиуса-вектора, соединяющего центр масс (ЦМ) ракеты и центр поля управления, а выработка управляющей силы осуществляется в соответствии с законом полярного управления, состоящим в том, что
- полярную управляющую силу направляют в центр поля управления независимо от скорости относительного движения поля управления и ракеты,
- величину вырабатываемой полярной управляющей силы определяют по зависимости
kρ=k1(ρ+k2ρ'+k3ρ''),
где
kρ - величина полярной управляющей силы,
k1,2,3 - коэффициенты пропорциональности, определяемые из условий устойчивости и точности управления,
ρ - отклонение ЦМ ракеты от центра поля управления,
ρ' - радиальная скорость движения ЦМ ракеты,
ρ'' - центростремительное ускорение движения ЦМ ракеты,
и изменяют в соответствии с угловым положением приемного устройства ракеты относительно радиуса-вектора, соединяющего ЦМ ракеты и центр поля управления.
Для достижения поставленной задачи в систему управления ракетой, содержащую источник электромагнитного излучения, последовательно соединенные приемное устройство и координатор, блок выработки команд управления, рулевой привод, введены блок выделения крена и блок преобразования команд, причем приемное устройство смещено относительно продольной оси ракеты, блок выделения крена и блок преобразования команд соответственно содержат последовательно соединенные узкополосный фильтр, первый сумматор и интегратор, второй сумматор, умножитель, вход узкополосного фильтра и второй вход первого сумматора соединены с выходом координатора, выход первого сумматора соединен со входом блока выработки команд управления, выход которого соединен со входом интегратора и вторым входом второго сумматора, второй вход умножителя соединен с выходом узкополосного фильтра, а выход умножителя соединен со входом рулевого привода.
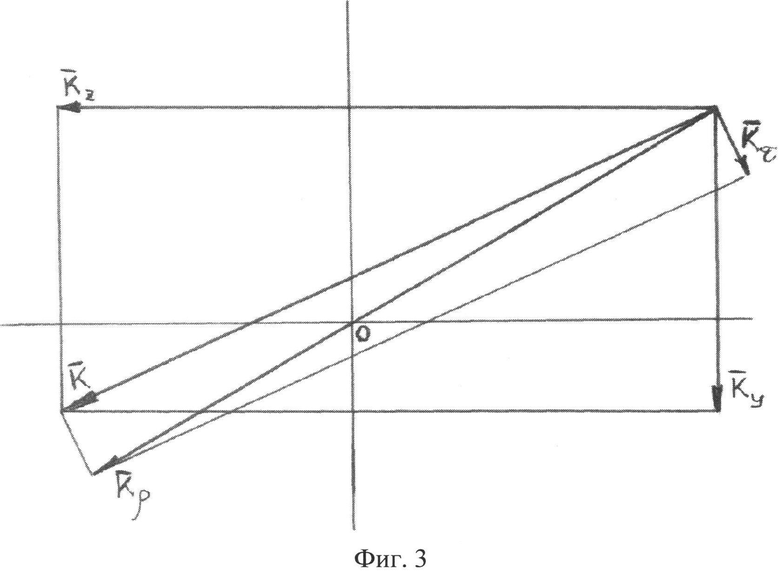
На фиг.1 изображено положение приемного устройства ракеты, смещенного относительно ее продольной оси, в поперечном сечении луча, или поле управления;
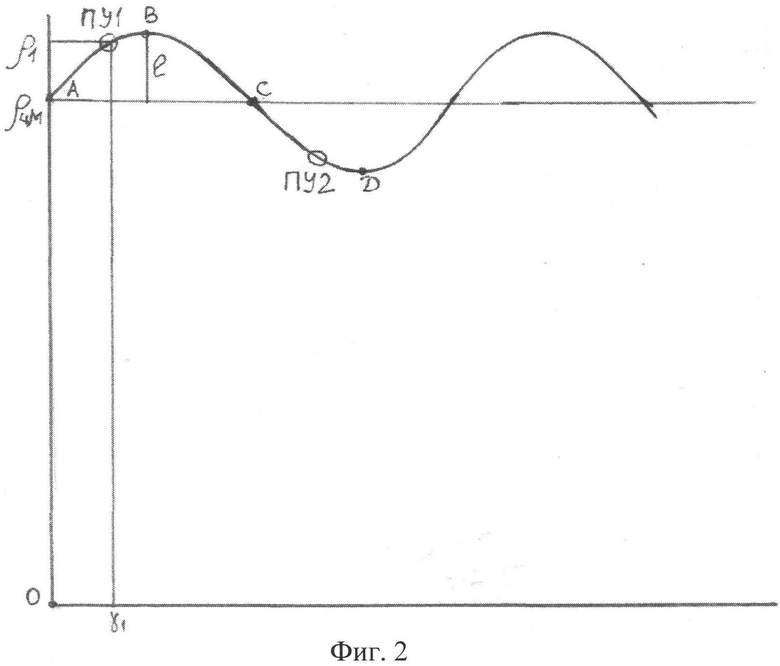
на фиг.2 - сигнал с выхода координатора ракеты;
на фиг.3 - структура вырабатываемых управляющих сил в декартовой и полярной системе координат поля управления;
на фиг.4 - пример действия возмущающих сил на краю и в центре луча;
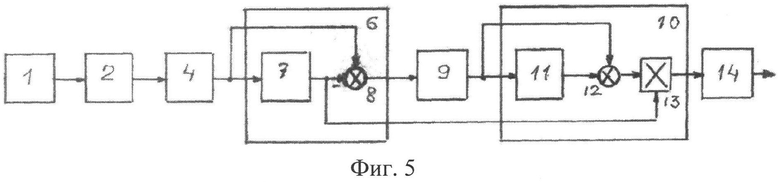
на фиг.5 - структурная схема разработанной системы управления;
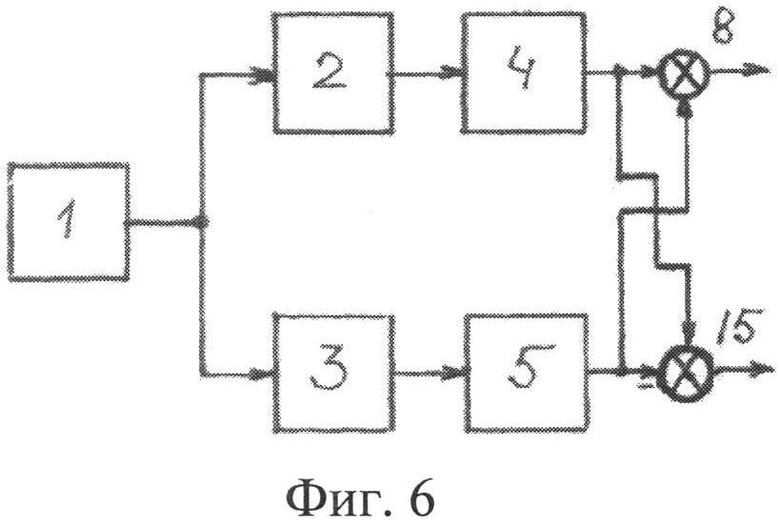
на фиг.6 - второй вариант реализации приемного устройства и координатора.
На фиг.1-6 обозначено:
Q - центр луча;
ПУ1, ПУ2 - текущее и повернутое на 180° положение приемного устройства ракеты в поле управления;
A, B, C, D - экстремальные значения положения приемного устройства ракеты, измеряемые относительно радиуса-вектора, соединяющего ЦМ ракеты и центр луча;
ρцм, ρ1 - радиусы-векторы, соответствующие текущим положениям ЦМ и приемного устройства ракеты относительно центра луча;
l - расстояние между приемным устройством и осью ракеты;
γ - угол крена ракеты, отсчитываемый или измеряемый относительно радиуса-вектора, соединяющего ЦМ ракеты и центр луча;





F1, F2 - возмущающие силы;
Δ - динамическая ошибка системы управления;
1 - источник электромагнитного излучения;
2, 3 - приемные устройства ракеты;
4, 5 - координаторы;
6 - блок выделения крена;
7 - узкополосный фильтр;
8, 12, 15 - сумматоры;
9 - блок выработки команд управления;
10 - блок преобразования команд;
11 - интегратор;
13 - умножитель;
14 - рулевой привод.
Предлагаемый способ управления ракетой содержит выработку электромагнитного луча, кодирование поперечного сечения луча или поля управления электромагнитными импульсами, напряженность и длительность каждой пары которых постоянна на любой концентрической, по отношению к центру луча, окружности и линейно изменяется от центра луча к краю, измерение приемным устройством ракеты их текущих значений и преобразование в электрический сигнал, пропорциональный отклонению приемного устройства ракеты от центра поля управления, измерение углового положения приемного устройства ракеты относительно радиуса-вектора, соединяющего ЦМ ракеты и центр поля управления, выработку сигнала управления, отклонение рулевого органа, выработку управляющей силы пропорционально отклонению рулевого органа в соответствии с законом полярного управления, состоящим в том, что
- полярную управляющую силу направляют в центр поля управления независимо от скорости относительного движения поля управления и ракеты,
- величину вырабатываемой полярной управляющей силы определяют по зависимости
kρ=k1(ρ+k2ρ'+k3ρ''),
где
kρ - величина полярной управляющей силы,
k1,2,3 - коэффициенты пропорциональности, определяемые из условий устойчивости и точности управления,
ρ - отклонение ЦМ ракеты от центра поля управления,
ρ' - радиальная скорость движения центра масс ракеты,
ρ'' - центростремительное ускорение движения ЦМ ракеты,
и изменяют в соответствии с угловым положением приемного устройства ракеты относительно радиуса-вектора, соединяющего ЦМ ракеты и центр поля управления.
Предлагаемая система управления, реализующая предложенный способ управления ракетой, содержит источник электромагнитного излучения 1, последовательно соединенные приемное устройство 2, координатор 4, блок выделения крена 6, блок выработки команд управления 9, блок преобразования команд 10 и рулевой привод 14, причем приемное устройство 2 смещено относительно продольной оси ракеты, блок выделения крена 6 и блок преобразования команд 10 соответственно содержат последовательно соединенные узкополосный фильтр 7, первый сумматор 8 и интегратор 11, второй сумматор 12, умножитель 13, вход узкополосного фильтра 7 и второй вход первого сумматора 8 соединены с выходом координатора 4, выход первого сумматора 8 соединен со входом блока выработки команд управления 9, выход которого соединен со входом интегратора 11 и вторым входом второго сумматора 12, второй вход умножителя 13 соединен с выходом узкополосного фильтра 7, а выход умножителя 13 соединен со входом рулевого привода 14.
Предлагаемый способ управления ракетой реализуется разработанной системой управления, работающей следующим образом.
На пункте управления радиолокатор 1 (фиг.5) вырабатывает электромагнитный луч и направляет в сторону цели. Электромагнитный луч вырабатывается передатчиком, состоящим из излучателя и отражателя (см. (1) стр.350-352). Ось излучателя смещена относительно оси отражателя на некоторый угол α и вращается с постоянной угловой скоростью Ωи. Благодаря вращению излучателя образуется равносигнальная линия, или центр луча, в направлении цели, где напряженность поля не зависит от диаграммы направленности, и поле управления, представляющее собой концентрические окружности одинаковой электромагнитной напряженности и длительности промежутков между импульсами. Структура вырабатываемых импульсов приведена в (1) на стр.414-416 и определяется конструкцией передатчиков, принципиально идентичных для всех радиолокационных систем (лучевых, самонаведения, радионавигационных и т.д.). Диаграмма направленности луча обеспечивает линейное изменение напряженности и длительности промежутков между импульсами при изменении радиуса концентрических окружностей от центра луча к краю. Передатчик, управляемый программой выработки импульсов, на каждом периоде, или шаге обновления информации, направляет в сторону цели определенную последовательность импульсов, обеспечивающих помехозащищенность, определение размеров цели и, по меньшей мере, два импульса, напряженность и временной интервал между которыми пропорциональны расстоянию от центра луча.
Приемное устройство ракеты 2 представляет собой последовательно соединенные антенну и узкополосный фильтр, настроенный на частоту излучения передатчика. Сигнал с выхода узкополосного фильтра представляет собой последовательность импульсов, амплитуда которых обратно пропорциональна отклонению приемного устройства ракеты от центра луча или поля управления. Примем допущение, что флюктуации электромагнитных волн радиолокатора невелики, и центр луча совпадает с центром поля управления. Сигнал с выхода приемного устройства поступает на вход координатора 4 ракеты. Координатор 4 ракеты содержит последовательно соединенные регулятор коэффициента усиления системы управления в зависимости от дальности до ракеты и детектор отклонения приемного устройства ракеты от оси луча. Регулятор может представлять собой, например, профильный, в соответствии с законом изменения дальности до ракеты, потенциометр с перемещающимся, при помощи часового механизма, движком. Детектор отклонения приемного устройства ракеты от оси луча представляет собой последовательно соединенные узкополосный фильтр, настроенный на частоту обновления информации, или частоту вращения излучателя радиолокатора, диод, или диодный мост и сумматор, или операционный усилитель, на второй вход которого поступает напряжение, равное max с выхода диода, но противоположного знака. Сигнал с выхода сумматора, являющегося выходом координатора, будет максимальным, когда приемное устройство находится на краю луча. Детектор отклонения приемного устройства ракеты от оси луча может также представлять собой последовательно соединенные узкополосный фильтр, настроенный на частоту обновления информации, и сглаживающий фильтр, аналогичный приведенному в (1) на стр.308. Таким образом, амплитуда принимаемого импульсного сигнала преобразуется в аналоговый электрический сигнал, величина которого пропорциональна величине отклонения приемного устройства ракеты от оси луча. Разделение каналов в данной системе отсутствует, поэтому фазовые детекторы также отсутствуют, а информация, заложенная в фазе принимаемого сигнала, не используется. Приемное устройство смещено относительно продольной оси ракеты. Вращение ракеты по крену иллюстрируется фиг.1, на которой приемное устройство ракеты на каждом обороте последовательно занимает положения A, ПУ1, В, С, ПУ2, D. Текущее значение ρ1 измеряемого отклонения представляет собой сумму отклонения ЦМ ракеты относительно центра луча и приемного устройства относительно радиуса-вектора, соединяющего ЦМ ракеты и центр луча. На фиг.2 показан сигнал с выхода координатора ракеты, соответствующий положениям приемного устройства на фиг.1. Очевидно, что в какой бы стороне от центра луча не находилась ракета, max и min сигнал на выходе координатора, соответствующий положениям В, D (фиг.1) приемного устройства, будет появляться тогда, когда оно будет занимать самое дальнее и самое ближнее положение по отношению к центру луча, т.е. фаза сигнала углового положения ракеты всегда будет как-бы «подстраиваться» под то положение радиуса-вектора, на котором в этот момент находится ЦМ.
Разделение суммарного сигнала с выхода коордиратора 4 на сигнал, пропорциональный отклонению ЦМ ракеты от центра луча, и сигнал, пропорциональный отклонению приемного устройства ракеты от радиуса-вектора, соединяющего ЦМ ракеты и центр луча, осуществляется блоком выделения крена 6, содержащим последовательно соединенные узкополосный фильтр 7 и сумматор 8. Узкополосный фильтр 7, например резонансный, настроенный на частоту вращения ракеты, выделяет сигнал, пропорциональный угловому положению ракеты относительно радиуса-вектора, соединяющего ЦМ ракеты и центр луча, или крену ракеты. Эффективное (практически безошибочное) выделение сигнала крена происходит при частоте вращения ракеты не менее чем в 10 раз больше частоты колебаний ЦМ ракеты. Вычитая на сумматоре 8 полученный сигнал из суммарного, который имеется на выходе координатора, получим сигнал, пропорциональный отклонению ЦМ ракеты от центра луча. В случае отличия частоты вращения ракеты от частоты настройки фильтра, может возникнуть погрешность его работы, а при значительном отличии фильтрация может совсем прекратиться. Поэтому для ракет, частота вращения которых существенно нестабильна, необходимо применять схему с двумя приемными устройствами, смещенными относительно продольной оси ракеты в противоположные стороны на расстояние l (фиг.1, ПУ1, ПУ2). Вместо узкополосного фильтра необходимо использовать сумматор 15, вычитающий сигнал со второго координатора 5 из сигнала с первого координатора 4, как показано на фиг.6. Из фиг.1 видно, что сигналы с выходов первого и второго координаторов, входы которых соединены соответственно с выходами первого и второго приемных устройств, равны:
kk(ρ+lcosγ), kk(ρ-lcosγ).
Складывая их (фиг.6) на сумматоре 8 и вычитая на сумматоре 15, получим, соответственно:
2kkρ и 2kklcosγ,
где
kk - коэффициент передачи координаторов (некоторой ошибкой, связанной с отличием коэффициентов передачи первого и второго координаторов друг от друга можно пренебречь).
Схема с двумя приемными устройствами и двумя координаторами обеспечивает работу системы управления (выделение сигналов, пропорциональных отклонению ЦМ и угловому положению ракеты) при любой частоте и направлении вращения, а также без вращения ракеты по крену. Последнее может служить для уменьшения веса и габаритов рулевого привода, т.к. его быстродействие возможно уменьшить.
Лучевое наведение ракеты по движущимся целям обычно осуществляется по методу совмещения, или трех точек (см.(1) стр.345-347). Теоретически для выработки команд по этому методу необходимо формировать, по меньшей мере, две взаимно перпендикулярные силы. Одна из составляющих каждой силы должна обеспечивать «упреждение» ее действия. «Упреждение» действия вырабатываемых сил должно совпадать по величине и быть противоположно по направлению скорости движения ЦМ ракеты. Соответственно, силы должны быть пропорциональны отклонению и производной отклонения ЦМ ракеты от вертикальной и горизонтальной оси декартовой системы координат поля управления:
где
ky,z - команды управления соответственно в вертикальной и горизонтальной плоскости;
k1,2 - коэффициенты пропорциональности;
y, z - отклонения ЦМ ракеты от вертикальной и горизонтальной оси декартовой системы координат поля управления;
y', z' - производные отклонений или скорости движения ЦМ ракеты соответственно в вертикальной и горизонтальной плоскости.
Преобразуя уравнения (1) в полярную систему координат, получим:
где
kρ,τ - «нормальная» и «тангенциальная» команды полярной системы координат поля управления;
k1,2,3 - коэффициенты пропорциональности;
ρ - отклонение ЦМ ракеты от центра луча;
ρ', φ' - «радиальная» и «тангенциальная» скорости движения ЦМ ракеты в полярной системе координат поля управления.
Сравнение формул (1) и (2) показывает, что структура управляющих сил в полярной системе координат существенно отличается от соответствующей структуры в декартовой системе координат. Управляющие силы в полярной системе координат не имеют составляющую, пропорциональную полярному углу отклонения ЦМ ракеты от радиуса-вектора, принятого за начало отсчета. Это означает, что «тангенциальная» управляющая сила должна парировать только «тангенциальные» скорости движения ЦМ ракеты относительно центра поля управления.
На фиг.3 показан пример построения управляющих сил в декартовой и полярной системе координат при наличии движения цели. На фиг.3 обозначено



Векторный анализ сил показывает, что «нормальная» управляющая сила состоит из двух частей, причем первая из них, пропорциональная отклонению ЦМ ракеты от центра луча (ρ), полностью (по величине и направлению) совпадает с суммой первых частей вертикальной и горизонтальной управляющей силы (y, z), а вторая, пропорциональная скорости движения ЦМ ракеты, или обеспечивающая «упреждение», равна только «нормальной» составляющей суммарного «упреждения». «Тангенциальная» составляющая суммарного «упреждения» полностью (по величине и направлению) совпадает с «тангенциальной» управляющей силой.
Из фиг.4 следует:
- реализация «упреждения» движения цели вызывает отличие направления суммарной управляющей силы от направления на центр луча;
- «нормальная» управляющая сила практически равна суммарной по величине и отличается на величину «тангенциального» «упрежления» по направлению.
На основании вышеизложенного можно сделать следующие выводы:
- величина и направление суммарной управляющей силы не зависит от системы координат поля управления;
- в декартовой системе координат вертикальная и горизонтальная управляющие силы в равной мере служат для решения главной задачи управления - приведение ЦМ ракеты в центр поля управления;
- в полярной системе координат «нормальная» управляющая сила имеет основной характер и решает главную задачу управления - приведение ЦМ ракеты в центр поля управления, а «тангенциальная» управляющая сила имеет вспомогательный характер и служит для стабилизации движения ЦМ ракеты по радиусу-вектору «нормальной» управляющей силы.
В разработанном способе управления «тангенциальная» управляющая сила не вырабатывается.
Из физики известно, что для осуществления кругового или «тангенциального» движения материального тела необходимо создавать центростремительную силу, равную:
где
F - центростремительная сила;
m - масса, в данном случае, ракеты;
V - «тангенциальная» скорость;
R - радиус, по которому осуществляется движение.
Очевидно, что если выработать силу большую, чем требуется по формуле (3), то для заданных m, V радиус движения будет уменьшен. В предлагаемом способе компенсация «тангенциального» движения ЦМ ракеты осуществляется за счет выработки одной из составляющих «нормальной» управляющей силы, пропорциональной центростремительному ускорению движения.
Блок выработки команд управления 9 в соответствии с формулами (2) вырабатывает команду, пропорциональную ρ+k2ρ'.
Команда вырабатывается, например, дифференцирующим звеном (см. (1) стр.375-379), на вход которого поступает сигнал с выхода сумматора 8, пропорциональный текущему отклонению ЦМ ракеты от центра луча. Далее команда поступает в блок преобразования команд 10, содержащий последовательно соединенные интегратор 11, сумматор 12, умножитель. Сумматор 12 необходим для исключения влияния на качество переходного процесса интегратора 11, а также для обеспечения устойчивости системы управления (см. (1) стр.239-247). Из этих же условий постоянная времени интегратора выбирается не менее чем в 3 раза больше времени окончания переходного процесса. Интегратор 11 добавляет в команду составляющую, равную k3ρ'', необходимую для компенсации действующих центростремительных ускорений, в том числе, силы тяжести, скорости движения линии визирования цели и т.д. В результате динамическая ошибка уменьшается и ЦМ приближается к центру луча. Возникающие «тангенциальные» возмущения, при приближении ЦМ ракеты к центру луча, «превращаются» в «радиальные». Геометрически этот процесс иллюстрируется фиг.4. Из фиг.4 видно, что «тангенциальная» возмущающая сила F1, действующая на расстоянии Δ от центра луча, «превращается», как и любая другая, в «радиальную» в центре луча.
Итак, для управления ракетой по методу трех точек в полярной системе координат необходимо и достаточно, во-первых, вырабатывать только одну «нормальную» управляющую силу, величина которой определяется зависимостью kρ=k1(ρ+k2ρ'+k3ρ''),
пропорциональна отклонению ЦМ ракеты от центра луча (ρ), «радиальной» скорости (ρ') центростремительному ускорению (ρ'') движения ЦМ ракеты относительно центра луча и, во-вторых, направлять ее в центр луча независимо от относительной скорости движения ЦМ ракеты и центра луча.
Коэффициенты пропорциональности, приведенные в формулах (1), (2), (3), определяются в процессе синтеза конкретной системы управления из условий обеспечения необходимой устойчивости, точности и качества переходного процесса (см. (1) стр.89-138).
Разделительный узкополосный фильтр, дифференцирующее звено, сумматор, сглаживающий фильтр, интегратор, умножитель могут быть реализованы на операционных усилителях и приведены в различной литературе, например (см. Тетельбаум И.М., Шнейдер Ю.Р. «400 схем для АВМ», М., «Энергия», 1978 г., стр.7-10, табл.В-1, стр.24-33, рис.1.1, табл.1-1).
Преобразование сформированной команды управления в соответствии с угловым положением ракеты относительно радиуса-вектора, соединяющего ЦМ ракеты и центр луча осуществляется путем умножения сигналов с выхода сумматора 12 и узкополосного фильтра 7 умножителем 13. Сигнал с выхода умножителя 13 поступает на вход рулевого привода 14(см. (1) стр.37-40). Рули, отклоняясь, вызывают разворот ракеты на угол атаки. Управляющая сила у ракет, выполненных по схеме «утка», вырабатывается, в основном, корпусом и стабилизаторами, а у ракет, выполненных по «нормальной» схеме - поворотными крыльями. В любом случае управляющая сила вырабатывается пропорционально отклонению рулевых органов ракеты. Управляющая сила обеспечивает перемещение ЦМ ракеты в центр луча. Ошибки построения команды по направлению в центр луча отсутствуют, так как измерение углового положения ракеты осуществляется непосредственно в электромагнитном информационном луче тем же приемным устройством, которое определяет отклонение от центра луча. Соответственно, предложенный способ управления ракетой принципиально не имеет операций, в результате выполнения которых может возникнуть «скручивание» систем координат, или разворот исполнительной системы координат относительно измерительной.
Разработанные способ и система управления ракетой существенно отличается от известных. Управление ракетой при наведении в движущуюся цель обеспечивается только по одной координате - радиусу-вектору, применяется смещение приемного устройства относительно продольной оси ракеты и специальный закон выработки управляющей силы. Эти технические решения позволяют исключить операции и устройства, приводящие к «скручиванию» исполнительной системы координат относительно измерительной. Так, в известных способах и системах, имеется разделение каналов на вертикальный и горизонтальный и измерение углового положения ракеты по крену опорным гироскопом. Поворот луча на 90° приводит к тому, что каналы меняются местами, и процесс управления прекращается даже при наличии устройств, обеспечивающих компенсацию «скручивания» систем координат. В предложенных способе и системе используется имеющаяся концентрическая структура электромагнитного информационного канала и измерение углового положения ракеты в том же луче и тем же приемным устройством, которое определяет основную информацию управления - отклонение от оси луча. Очевидно, что не только поворот, но и вращение луча никак не может повлиять на процесс управления ракетой.
Надежность способа и системы управления, в основном, определяются их сложностью. Чем больше операций способа и чем больше устройств в системе обеспечивают процесс управления ракетой, тем ниже их надежность. В предложенном способе исключены операции, связанные с фазовым разделением каналов и отдельная операция определения углового положения ракеты относительно вертикали или горизонта. Соответственно, в системе исключен один из каналов управления, а также опорный гироскоп крена. Операции способа сокращены до минимума, а в системе остался один канал (меньше невозможно) и то, что неизменно-рулевой привод и сама ракета.
Итак, предлагаемые способ и система управления обеспечивают управление ракетой при вращении электромагнитного информационного луча по крену и значительно повышают надежность управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373479C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242698C2 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ | 1984 |
|
SU1839988A1 |
| СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2147375C1 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |

Предложенная группа технических решений относится к классу лучевых способов и систем управления ракетами, обеспечивающих прямое попадание в цель. Задача состоит в обеспечении управления ракетой при вращении электромагнитного информационного луча по крену без компенсации «скручивания» и повышении надежности работы. Предлагаемый способ управления ракетой содержит выработку электромагнитного луча, кодирование поперечного сечения луча или поля управления электромагнитными импульсами, напряженность и длительность каждой пары которых постоянна на любой концентрической, по отношению к центру луча, окружности и линейно изменяется от центра луча к краю, измерение приемным устройством ракеты их текущих значений и преобразование в электрический сигнал, пропорциональный отклонению приемного устройства ракеты от центра поля управления, измерение углового положения приемного устройства ракеты относительно радиуса-вектора, соединяющего ЦМ ракеты и центр поля управления, выработку сигнала управления, отклонение рулевого органа, выработку управляющей силы пропорционально отклонению рулевого органа и в соответствии с законом полярного управления, состоящем в том, что полярную управляющую силу направляют в центр поля управления независимо от скорости относительного движения поля управления и ракеты, величину вырабатываемой полярной управляющей силы определяют по зависимости kρ=k1(ρ+k2ρ'+k3ρ''), где kρ - величина полярной управляющей силы, k1,2,3 - коэффициенты пропорциональности определяемые из условий устойчивости и точности управления, ρ - отклонение ЦМ ракеты от центра поля управления, ρ' - радиальная скорость движения центра масс ракеты, ρ'' - центростремительное ускорение движения ЦМ ракеты, и изменяют в соответствии с угловым положением приемного устройства ракеты относительно радиуса-вектора, соединяющего ЦМ ракеты и центр поля управления. Предлагаемая система управления, реализующая предложенный способ управления ракетой, содержит источник электромагнитного излучения, последовательно соединенные приемное устройство, координатор, блок выделения крена, блок выработки команд управления, блок преобразования команд и рулевой привод, причем приемное устройство смещено относительно продольной оси ракеты, блок выделения крена и блок преобразования команд соответственно содержат последовательно соединенные узкополосный фильтр, первый сумматор и интегратор, второй сумматор, умножитель, вход узкополосного фильтра и второй вход первого сумматора соединены с выходом координатора, выход которого соединен со входом интегратора и вторым входом второго сумматора, второй вход умножителя соединен с выходом узкополосного фильтра, а выход умножителя соединен со входом рулевого привода. 2 н.п. ф-лы, 6 ил.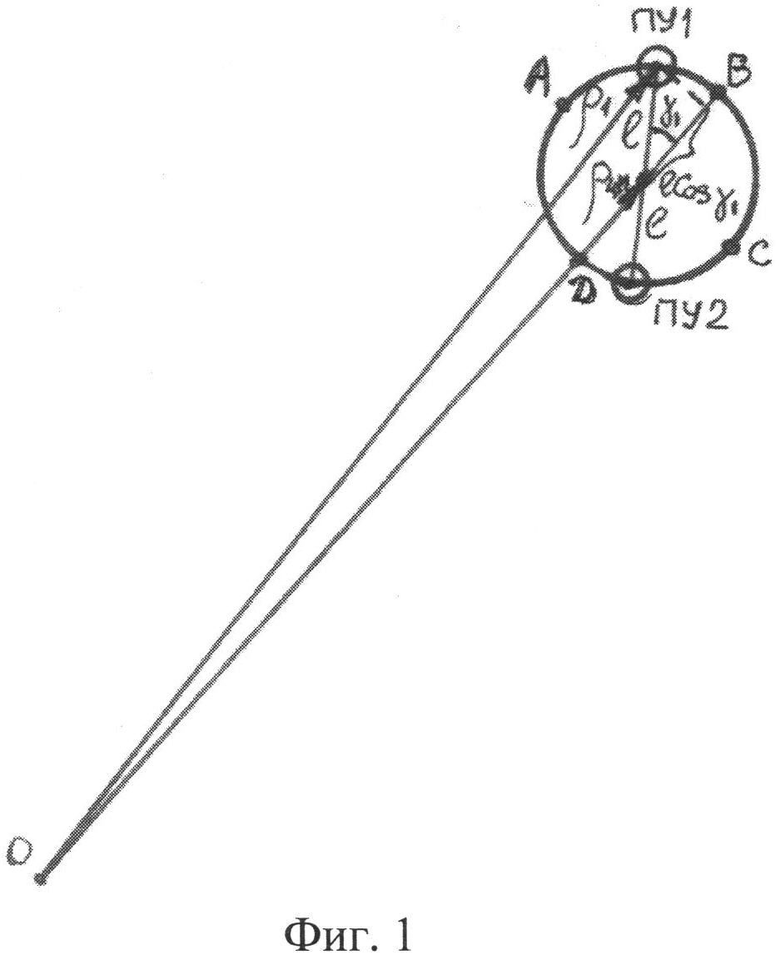
1. Способ управления ракетой, состоящий в выработке электромагнитного луча, кодировании поперечного сечения луча или поля управления электромагнитными импульсами, напряженность и длительность каждой пары которых постоянна на любой концентрической, по отношению к центру луча, окружности и линейно изменяется от центра луча к краю, измерении приемным устройством ракеты их текущих значений и преобразовании в электрический сигнал, пропорциональный отклонению приемного устройства ракеты от центра поля управления, выработке управляющей силы пропорционально отклонению рулевого органа, отличающийся тем, что
измеряют угловое положение приемного устройства ракеты относительно радиуса-вектора, соединяющего центр масс ракеты и центр поля управления, а управляющую силу вырабатывают в соответствии с законом полярного управления, состоящем в том, что
- полярную управляющую силу направляют в центр поля управления независимо от скорости относительного движения поля управления и ракеты,
- величину вырабатываемой полярной управляющей силы определяют по зависимости
kρ=k1(ρ+k2ρ'+k3ρ"), где
kρ - величина полярной управляющей силы,
k1,2,3 - коэффициенты пропорциональности, определяемые из условий устойчивости и точности управления,
ρ - отклонение центра масс ракеты от центра поля управления,
ρ' - «радиальная» скорость движения центра масс ракеты,
ρ"
- центростремительное ускорение движения центра масс ракеты,
и изменяют в соответствии с угловым положением приемного устройства ракеты относительно радиуса-вектора, соединяющего центр масс ракеты и центр поля управления.
2. Система управления ракетой содержит источник электромагнитного излучения, последовательно соединенные приемное устройство и координатор, блок выработки команд управления, рулевой привод, отличающаяся тем, что введены блок выделения крена и блок преобразования команд, причем приемное устройство смещено относительно продольной оси ракеты, блок выделения крена и блок преобразования команд соответственно содержат последовательно соединенные узкополосный фильтр, первый сумматор и интегратор, второй сумматор, умножитель, вход узкополосного фильтра и второй вход первого сумматора соединены с выходом координатора, выход первого сумматора соединен со входом блока выработки команд управления, выход которого соединен со входом интегратора и вторым входом второго сумматора, второй вход умножителя соединен с выходом узкополосного фильтра, а выход умножителя соединен со входом рулевого привода.
| БЕЛОЦЕРКОВСКИЙ Г.Б | |||
| Основы радиолокации и радиолокационные устройства | |||
| - М., Сов | |||
| радио, 1975 г | |||
| Способ изготовления струн | 1924 |
|
SU345A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2413918C1 |
| СОЛОДОВНИКОВ В.В., ПЛОТНИКОВ В.Н., ЯКОВЛЕВ А.В | |||
| Основы теории и элементы систем автоматического регулирования" М., "Машиностроение", 1985 г | |||
| Способ получения бумажной массы из стеблей хлопчатника | 1912 |
|
SU506A1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТАМИ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2456217C2 |

