Изобретение относится к ракетной технике и предназначено для использования в системах наведения управляемых ракет.
Известен способ формирования сигналов управления ракетой, включающий в каналах управления по высоте и направлению формирование сигнала, пропорционального отклонению ракеты от заданной линии наведения, формирование команды управления, пропорциональной сигналу отклонения ракеты от заданной линии наведения, и последующее формирование сигнала управления рулевым органом ракеты ([1], H.T.Кузовков. Системы стабилизации летательных аппаратов. - М.: Высшая школа, 1976, стр.221-223, 233).
В известном способе формирование сигналов управления ракетой осуществляется в каждом канале управления по высоте и направлению независимо друг от друга, что и предопределяет его недостаток, так как в реальности в системе управления ракетой всегда существует перекрестная (фазовая) связь между ее каналами. Связь каналов управления снижает устойчивость системы управления и приводит к колебательному процессу наведения ракеты в виде спирального движения ее центра масс относительно линии наведения и, в конечном счете, к увеличению промаха или даже к срыву наведения ракеты ([2], Л.С.Гуткин, Ю.П.Борисов и др. Радиоуправление реактивными снарядами и космическими аппаратами. - М.: Советское радио, 1968, стр.189-194).
Наиболее близким к предлагаемому является способ формирования сигналов управления ракетой, включающий в каждом канале управления по высоте и направлению формирование сигнала, пропорционального отклонению ракеты от заданной линии наведения, формирование команды управления ракетой, пропорциональной отклонению ракеты от заданной линии наведения, и последующее формирование по командам управления в каналах высоты и направления сигналов управления рулевыми органами ракеты в каналах управления по высоте и направлению с учетом углового параметра, определяемого заранее до пуска ракеты ([1], H.T. Кузовков. Системы стабилизации летательных аппаратов. - М.: Высшая школа, 1976, стр.243-250, 257-260).
В этом способе команда управления U ракетой в каждом канале управления формируется в соответствии с соотношением

где коэффициент передачи К0 и весовой коэффициент k1 - параметры закона управления, выбираемые при анализе устойчивости и точности замкнутого контура управления ракетой, а h и  - измеренное линейное отклонение ракеты от заданной линии наведения и его скорость изменения.
- измеренное линейное отклонение ракеты от заданной линии наведения и его скорость изменения.
Сигналы управления рулевыми органами ракеты формируются по командам управления ракетой в каналах высоты и направления путем их совместного преобразования с учетом углового параметра χ, характеризующего величину фазовой связи каналов управления, подлежащей компенсации. Возможность компенсации связи каналов управления в данном способе определяется конкретным видом источника, порождающим такую связь, а именно: инерционностью рулевого привода ракеты, характеризующейся его постоянной времени, или кинетическим моментом корпуса вращающейся по крену ракеты. Величина и знак параметра χ, определяются заранее при проектировании системы управления ракетой, т.е. до пуска ракеты, по априори известным характеристикам ракеты, рулевого привода и предполагаемым условиям стрельбы. Так, для компенсации перекрестной связи каналов управления, порождаемой инерционностью рулевых приводов вращающейся по крену ракеты, этот параметр определяется соотношением

где Тр - постоянная времени рулевого привода ракеты, усредненная по условиям его изготовления и условиям стрельбы ракетой;
ω - ожидаемая (средняя) частота вращения ракеты по крену в процессе ее наведения.
Преобразование команд управления ракетой в сигналы управления ее рулевых приводов проводится путем векторного разворота команд на принятый угловой параметр χ, в соответствии с соотношениями

где Uy, Uz - команды управления, пропорциональные линейным отклонениям ракеты, в каналах управления по высоте и по направлению соответственно;
Кy, Кz - соответственно сигналы управления рулевыми приводами в каналах управления по высоте и направлению, скорректированные с учетом предполагаемой фазовой связи χ каналов управления.
Такой способ формирования сигналов управления позволяет повысить точность наведения ракеты за счет частичной компенсации связи каналов управления, определяемой заранее известными факторами - постоянной времени рулевого привода ракеты и условиями стрельбы. Вместе с тем, известное решение обладает и недостатками. Так как в реальных условиях полета ракеты фактические значения постоянной времени рулевого привода и частоты вращения ракеты будут отличаться от принятых усредненных значений, то связь каналов управления, порождаемая инерционностью привода, не будет полностью скомпенсирована.
Помимо указанных источников связи каналов управления, на компенсацию которой направлено известное решение, в системе управления ракетой имеются и другие источники и причины, порождающие перекрестную связь ее каналов, например:
- скручивание измерительной системы координат, связанной с пеленгаторами системы управления, и исполнительной системы координат, связанной с ракетой, возникающее из-за различного характера их движений в процессе наведения ракеты. Связь каналов управления, порождаемая этим источником, может частично компенсироваться преобразованием команд управления, аналогичным преобразованию вида (3), на угловой параметр, который определяется теперь уже измеряемыми углами перемещения линии визирования цели (ЛВЦ) ([2], Л.С.Гуткин, Ю.П.Борисов и др. Радиоуправление реактивными снарядами и космическими аппаратами. - М.: Советское радио, 1968, стр.191-202). Такой учет связи каналов также является приближенным, так как для полной ее компенсации надо знать перемещение ЛВЦ относительно осей системы координат связанной с подъемной силой ракеты, что практически невыполнимо;
- уходы гироскопа крена ракеты, формирующего опорную систему координат на борту ракеты, определяемые погрешностью его изготовления и условиями стрельбы. Возникающая из-за этого связь каналов управления носит случайный характер, как по величине, так и по направлению, и изменяется по времени полета ракеты, и поэтому ее компенсация заранее, до пуска ракеты, не может быть вообще предусмотрена;
- несимметричность каналов управления из-за разбросов параметров системы управления и ракеты, а также ошибок стабилизации ее крена.
Перекрестная связь каналов от таких источников носит случайный характер, а ее компенсация заранее не может быть предусмотрена. Суммарный вклад возможных источников связи приводит к непредвиденной для конкретной реализации стрельбы ракетой величине перекрестной связи каналов управления, случайной как по величине, так и по направлению. Наличие фазовой связи приводит к нарушению пропорциональности ускорения, развиваемого ракетой, ее отклонению, измеренному в соответствующих плоскостях наведения, что вызывает снижение точности наведения ракеты из-за уменьшения (или полной потери) устойчивости контура управления ракетой. Процесс наведения в таком случае носит колебательный характер в виде спирального движения ракеты относительно линии наведения, т.е. имеет место нарушение радиальной коррекции рассогласования ракеты ([1], H.T.Кузовков. Системы стабилизации летательных аппаратов. - М.: Высшая школа, 1976, стр.244-247), что приводит к снижению точности ее наведения или даже к срыву управления.
Задачей настоящего изобретения является повышение точности наведения и расширение условий применения ракеты при наличии фазовой связи каналов управления независимо от природы и источников, ее порождающих.
Решение поставленной задачи достигается тем, что в способе формирования сигналов управления ракетой, включающем в каждом канале управления по высоте и направлению формирование сигнала, пропорционального отклонению ракеты от заданной линии наведения, формирование команды управления ракетой, пропорциональной сигналу отклонения ракеты от заданной линии наведения, и последующее формирование по командам управления в каналах управления по высоте и направлению сигналов управления рулевыми органами ракеты, новым является то, что команды управления ракетой в каналах управления по высоте и направлению преобразуют в текущем времени наведения ракеты так, что радиус-вектор, образованный командами управления поворачивается на угол, величина которого пропорциональна текущей площади сектора, описываемого в плоскости измеренного отклонения ракеты радиус-вектором, образованным сигналами отклонения ракеты от заданной линии наведения в каналах управления по высоте и направлению, от своего положения в момент начала формирования сигналов отклонения ракеты от заданной линии наведения, а знак угла поворота вектора команд управления определяют в соответствии со знаком приращения площади указанного сектора с учетом текущего направления вращения радиус-вектора, образованного сигналами отклонения ракеты от заданной линии наведения.
Сущность предлагаемого изобретения заключается в определении по текущим отклонениям ракеты в картинной плоскости линии наведения характера движения ракеты, и связанного с ним признака наличия фазовой связи каналов управления независимо от природы источника, ее порождающего, и введении в контуре управления ракетой текущего компенсирующего векторного разворота команд управления на ее величину в соответствующем направлении.
Схема, поясняющая формирование сигналов управления ракетой, приведена на фиг.1, функциональные схемы системы для реализации предлагаемого способа формирования сигналов управления - на фиг.2 и фиг.3.
На фиг.1 обозначено:
OYZ - прямоугольная система координат в картинной плоскости, связанной с заданной линией наведения О;
ТрР - траектория ракеты в картинной плоскости;
hy, hz - текущие отклонения ракеты от заданной линии наведения в каналах управления по высоте и направлению соответственно;
 ,
,  - текущие скорости изменения отклонений ракеты в каналах управления по высоте и направлению соответственно;
- текущие скорости изменения отклонений ракеты в каналах управления по высоте и направлению соответственно;
 - радиус-вектор, образованный отклонениями ракеты от заданной линии наведения в каналах управления по высоте и направлению;
- радиус-вектор, образованный отклонениями ракеты от заданной линии наведения в каналах управления по высоте и направлению;
φ - угол, определяющий текущее положение радиус-вектора отклонений  ракеты в картинной плоскости;
ракеты в картинной плоскости;
Ohnhτ - прямоугольная система координат, связанная с текущим положением радиус-вектора отклонений в картинной плоскости;
 - нормальная линейная скорость перемещения конца радиус-вектора отклонений в картинной плоскости.
- нормальная линейная скорость перемещения конца радиус-вектора отклонений в картинной плоскости.
Формирование сигналов управления ракетой предлагаемым способом осуществляется следующим образом. Ракета в процессе наведения, в результате воздействия возмущений (в том числе и возможной фазовой связи каналов управления), удерживается на заданной линии наведения с некоторой ошибкой, характеризуемой отклонениями (или радиус-вектором отклонения) в картинной плоскости наведения. По измеренным координатам цели и ракеты в каналах управления по высоте и направлению формируются сигналы, пропорциональные отклонениям ракеты от линии наведения hy и hz, пропорционально которым в соответствии с соотношением (1) формируются команды управления Uy и Uz в соответствующих каналах управления. Положение радиус-вектора отклонения в картинной плоскости наведения определяется углом
а его модуль (радиус) равен

Если связь каналов управления отсутствует, то под воздействием команд управления в результате радиальной коррекции ракета будет перемещаться, ликвидируя текущее рассогласование по кратчайшему пути, т.е. по направлению радиус-вектора отклонения в сторону уменьшения этой ошибки (к заданной линии наведения О). При этом составляющая регулярного вращательного (спирального) движения радиус-вектора будет отсутствовать (регулярная составляющая его нормальной линейной скорости  близка к нулю), а само движение будет соответствовать радиальному движению или близкому к нему флуктуационному движению под воздействием возможных нерегулярных или шумовых возмущений. В таком случае радиус-вектор в силу только радиального движения ракеты будет в процессе ее наведения описывать в картинной плоскости сектор, текущая площадь которого по времени, с учетом направления вращения, будет равна или близка к нулю.
близка к нулю), а само движение будет соответствовать радиальному движению или близкому к нему флуктуационному движению под воздействием возможных нерегулярных или шумовых возмущений. В таком случае радиус-вектор в силу только радиального движения ракеты будет в процессе ее наведения описывать в картинной плоскости сектор, текущая площадь которого по времени, с учетом направления вращения, будет равна или близка к нулю.
Если же в силу каких-либо причин связь каналов управления имеется, то ракета в картинной плоскости будет совершать относительно заданной линии наведения регулярное вращательное (спиральное) движение (т.е. имеет место нарушение радиальной коррекции). В этом случае радиус-вектор , определяющий положение ракеты в картинной плоскости, будет также совершать регулярное вращательное движение в направлении, определяемом знаком имеющейся фазовой связи. Тогда приращение площади сектора, описываемого радиус-вектором относительно первоначального положения в момент начала формирования сигналов отклонений ракеты, будет иметь в процессе наведения ракеты конечное значение отличное от нуля. Текущее направление вращения радиус-вектора и соответственно «знак» приращения заметаемой им площади будут определяться знаком текущей фазовой связи суммарной от всех источников (опережающей или запаздывающей), а величина этой площади будет определяться величиной фазовой связи каналов управления.
Площадь ΔS, описываемая в картинной плоскости радиус-вектором h при повороте на угол Δφ=φt-φну, где φну - угловое положение радиус-вектора в момент tну начала формирования сигналов линейных отклонений ракеты, а φt - его текущее угловое положение, определяется соотношением ([3], М.Я. Выгодский. Справочник по высшей математики. - М.: Физматгиз, 1963, стр.487)

где dφ - дифференциал угла φ, определяемый выражением

Тогда выражение (6) для текущей площади, заметаемой радиус-вектором , запишется в виде

Переходя в соотношении (8) к временному аргументу t, получим

Нормальная составляющая линейной скорости  годографа радиус-вектора в картинной плоскости будет также определяться наличием или отсутствием спирального движения ракеты, т.е. наличием или отсутствием фазовой связи каналов управления, а текущая величина этой скорости может быть выражена через составляющие скоростей
годографа радиус-вектора в картинной плоскости будет также определяться наличием или отсутствием спирального движения ракеты, т.е. наличием или отсутствием фазовой связи каналов управления, а текущая величина этой скорости может быть выражена через составляющие скоростей  ,
,  компонентов отклонения ракеты (фиг.1)
компонентов отклонения ракеты (фиг.1)

где  ,
,  .
.
Угловая скорость  вращения радиус-вектора , с учетом соотношения (10), будет определяться соотношением
вращения радиус-вектора , с учетом соотношения (10), будет определяться соотношением

Признаком наличия вращательного движения радиус-вектора отклонения и соответственно признаком наличия фазовой связи каналов управления могут служить регулярные составляющие площади сектора ΔS, описываемого радиус-вектором в картинной плоскости, или угловой скорости  радиус-вектора , или нормальной линейной скорости
радиус-вектора , или нормальной линейной скорости  его годографа. Так при отсутствии фазовой связи каналов управления усредненные значения указанных параметров будут на интервале времени наведения ракеты равны нулю, т.е.
его годографа. Так при отсутствии фазовой связи каналов управления усредненные значения указанных параметров будут на интервале времени наведения ракеты равны нулю, т.е.

При наличии фазовой связи каналов регулярные составляющие площади сектора, описываемого радиус-вектором , и скоростей его вращения в картинной плоскости на интервале времени наведения ракеты будут неравны нулю, т.е.

а их величины и знаки будут определяться соответственно величиной и знаком фазовой связи каналов управления.
Связь площади сектора, описываемого в картинной плоскости радиус-вектором , с фазовой связью (расфазировкой) каналов управления проиллюстрируем на примере двухканальной системы управления, собственное движение которой описывается (для простоты аналитических выкладок) уравнением первого порядка вида

где  - комплексная координата отклонения,
- комплексная координата отклонения,  - мнимая единица;
- мнимая единица;
 - комплексный коэффициент передачи системы управления. При наличии фазовой связи каналов управления коэффициент передачи К определяется соотношением
- комплексный коэффициент передачи системы управления. При наличии фазовой связи каналов управления коэффициент передачи К определяется соотношением

где Δ - фазовая связь каналов управления.
Пусть в момент tну начала формирования сигналов отклонений ракеты от линии наведения отклонение равно

тогда процесс выбора в системе управления начального рассогласования h0 описывается соотношением (решение уравнения(14))

а радиус-вектор отклонения в картинной плоскости займет текущее угловое положение φ, т.е.

где модуль h радиус-вектора , определяемый выражением

Из соотношений (17) и (18) следует, что

и тогда получаем

Текущая площадь сектора, описываемая в картинной плоскости радиус-вектором отклонения, будет равна

Видно, что площадь ΔS сектора, описываемая радиус-вектором отклонения , при выборе начального рассогласования h0 в системе с фазовой связью каналов управления определяется параметрами системы (в данном случае коэффициентом передачи К) и величиной и знаком фазовой связи каналов Δ.
Таким образом, определяя угловой параметр (угол) γф пропорционально заметаемой радиус-вектором площади сектора ΔS, как

где коэффициент пропорциональности k задается выражением

и далее разворачивают вектор команд управления на текущий угол γф в направлении в соответствии со знаком заметаемой площади ΔS (в направлении противоположном направлению вращения радиус-вектором ), формируя тем самым сигналы управления рулевыми органами ракеты. Такое преобразование команд управления Uy, Uz, пропорциональных линейным отклонениям ракеты в каналах высоты и направления, осуществляется в соответствии с соотношениями

и которые затем в виде управляющих сигналов К1, К2 поступают на отработку соответствующими приводами рулевых органов ракеты. Такое преобразование команд управления ракетой, направленное на фазирование каналов системы управления с учетом текущего угла γф фазовой связи, определяемого по результатам реального движения ракеты в плоскости измеренного отклонения, будет препятствовать развитию спирального движения ракеты, и система будет отрабатывать возникающие рассогласования в виде радиальных движений ракеты относительно заданной линии наведения в направлениях, предписываемых командами управления пропорциональными измеренным линейным отклонениям ракеты, т.е. возможная перекрестная связь каналов управления ракетой будет скомпенсирована.
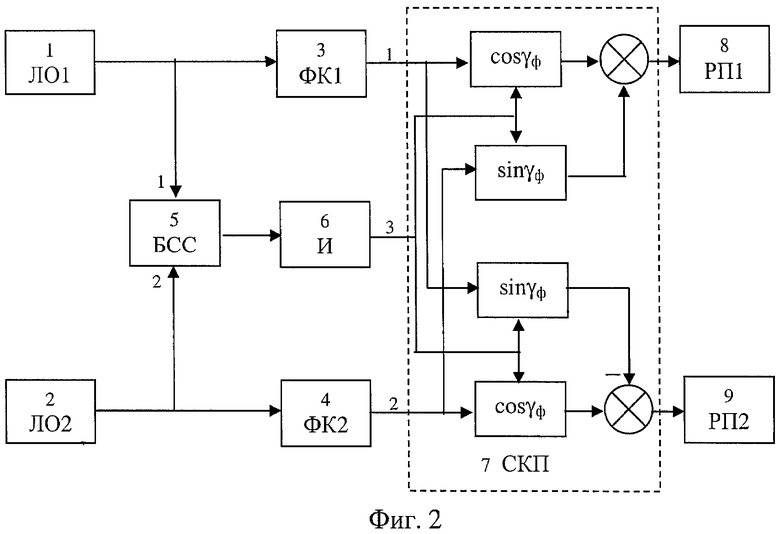
Система управления ракетой (фиг.2), реализующая предлагаемый способ, содержит первый и второй блоки формирования сигнала линейного отклонения ракеты от линии наведения (ЛО) 1 и 2, первый и второй блоки формирования команды управления, пропорциональной линейному отклонению, (ФК) 3 и 4, блок формирования сигнала секторной скорости (БСС) 5, интегратор (И) 6, синусно-косинусный преобразователь (СКП) 7 и первый и второй рулевые приводы ракеты (РП) 8 и 9.
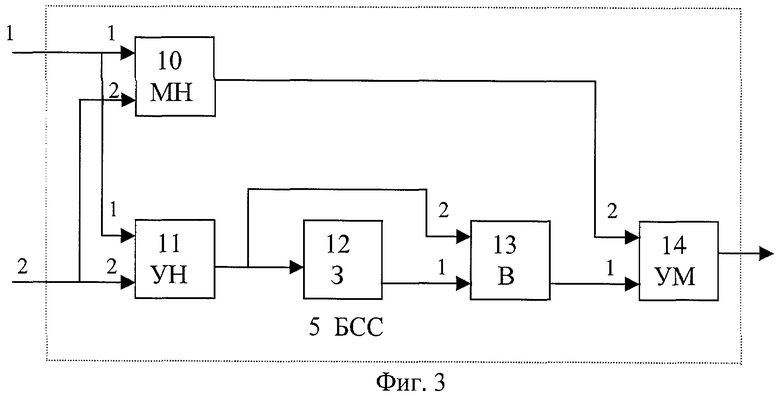
Блок формирования сигнала секторной скорости 5 может быть выполнен по схеме, представленной на фиг.3. Блок 5 содержит блок формирования сигнала, пропорционального квадрату модуля радиус-вектора линейного отклонения (МН) 10, первый вход которого является первым входом блока формирования сигнала секторной скорости 5, а второй вход - вторым входом блока 5, последовательно соединенные блок формирования сигнала, пропорционального углу поворота радиус-вектора линейного отклонения (УН) 11, первый и второй входы которого подключены соответственно к первому и второму входам блока 10, блок задержки сигнала (3) 12, блок вычитания (В) 13, второй вход которого подключен к выходу блока 11, и блок умножения (УМ) 14, второй вход которого подключен к выходу блока 10, а выход блока умножения 14 является выходом блока формирования сигнала секторной скорости 5.
Блоки формирования сигнала линейного отклонения ракеты 1 и 2, блоки формирования команды управления, пропорциональной линейному отклонению ракеты, 3 и 4, рулевые приводы 8 и 9 представляют собой известные штатные элементы системы управления ракетой ([1], H.T.Кузовков. Системы стабилизации летательных аппаратов. - М.: Высшая школа, 1976, стр.220-223, 233).
Интегратор 6 и синусно-косинусный преобразователь 7 представляют собой стандартные элементы и могут быть выполнены, например, на базе операционных усилителей ([4], И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987, соответственно стр.23, стр.184).
Блок формирования сигнала секторной скорости 5 с составляющими его элементами - блоком формирования сигнала, пропорционального квадрату модуля радиус-вектора линейного отклонения 10, блоком формирования сигнала, пропорционального углу поворота радиус-вектора линейного отклонения 11, блоком задержки сигнала 12, блоком вычитания 13, блоком умножения 14, могут быть выполнены в виде решающих элементов, например, на базе стандартных операционных усилителей ([4], И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987, соответственно стр.179-182, стр.124-125, стр.107-109, стр.22-23).
Блок формирования сигнала секторной скорости 5 может быть также выполнен на решающих элементах по схеме, реализующей процесс вычисления подынтегрального выражения соотношений (8) или (9).
Система работает следующим образом. По измеренным координатам цели и ракеты в блоках 1 и 2 формируются сигналы линейного отклонения ракеты от линии наведения в каналах управления по высоте и направлению соответственно, пропорционально которым в блоках 3 и 4 формируются команды управления ракетой Uy и Uz. С выходов блоков 1 и 2 сигналы линейных отклонений hy, hz также поступают соответственно на первый и второй входы блока формирования сигнала секторной скорости 5, где формируется в соответствии с подынтегральным выражением соотношения (6) сигнал секторной скорости. В блоке 10 формируется сигнал, пропорциональный квадрату модуля h2 радиус-вектора линейного отклонения (соотношение (5)), а в блоке 11 - сигнал, пропорциональный углу поворота φ радиус-вектора линейного отклонения (соотношение (4)).
Далее сигнал, пропорциональный углу поворота φ радиус-вектора отклонения задерживается в блоке 12 на время Δt и затем поступает на первый вход блока вычитания 13, на второй вход которого поступает сигнал, пропорциональный углу поворота φ радиус-вектора отклонения с блока 11. На выходе блока 13 получается сигнал, пропорциональный текущему приращению угла поворота радиус-вектора отклонения . Время Δt задержки сигнала, пропорционального углу поворота радиус-вектора , задается равным (0.05-0.1)Тс, где Тс - период, определяемый собственной частотой f, замкнутого контура управления ракетой, Тс=fс 1-. Затем в блоке умножения 14 формируется сигнал секторной скорости  , который с выхода блока 5 поступает на вход интегратора 6.
, который с выхода блока 5 поступает на вход интегратора 6.
Коэффициент пропорциональности k между сигналом углового параметра γф, характеризующего фазовую связь каналов управления, и сигналом площади ΔS, описываемой в картинной плоскости радиус-вектором отклонения, задается постоянной интегрирования Ти интегратора 6

где hm - предполагаемый максимальный радиус отклонения ракеты от линии наведения при наличии возможной фазовой связи каналов для заданной системы управления.
Сигнал углового параметра γф с выхода интегратора 6 поступает на третий вход синусно-косинусного преобразователя 7, на первый и второй входы которого поступают соответственно команды управления ракетой по высоте Uy и направлению Uz с выходов блоков 3 и 4 соответственно. После выполнения в блоке 7 преобразования вида (25) получаются сигналы управления ракетой по высоте К1 и направлению К2, которые затем поступают соответственно на входы первого и второго рулевых приводов ракеты 7 и 8. Отрабатываемые ракетой сигналы управления с проведенной коррекцией команд управления, направленной на компенсацию фазовой связи каналов, препятствуют образованию спирального движения ракеты относительно заданной линией наведения.
Таким образом, предлагаемое техническое решение обеспечивает повышение точности наведения и расширение условий применения ракеты, что выгодно отличает его от известных.
Источники информации
1. Н.Т.Кузовков. Системы стабилизации летательных аппаратов. - М.: Высшая школа, 1976.
2. Л.С.Гуткин, Ю.П.Борисов и др. Радиоуправление реактивными снарядами и космическими аппаратами. - М.: Советское радио, 1968.
3. М.Я.Выгодский. Справочник по высшей математики. - М.: Физматгиз, 1963.
4. И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2005 |
|
RU2282816C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ЕГО РЕАЛИЗУЮЩАЯ | 2013 |
|
RU2549615C2 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2005 |
|
RU2284001C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373479C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
Изобретение относится к ракетной технике и может быть использовано в системах управления ракетами. Способ включает формирование сигнала в каждом канале управления по высоте и направлению, формирование команды управления ракетой, формирование сигналов управления рулевыми органами ракеты в каналах управления по высоте и направлению. Команды управления ракетой преобразуют пропорционально отклонению ракеты от заданной линии наведения в текущем времени наведения ракеты. При этом радиус-вектор, образованный командами управления, поворачивается на угол, пропорциональный текущей площади сектора, описываемого в плоскости измеренного отклонения ракеты радиус-вектором, образованным сигналами отклонения ракеты от заданной линии наведения в каналах управления по высоте и направлению, от своего положения в момент начала формирования сигналов отклонения ракеты. Знак угла поворота вектора команд управления определяют в соответствии со знаком приращения площади указанного сектора с учетом текущего направления вращения радиус-вектора, образованного сигналами отклонения ракеты от заданной линии наведения. Технический результат - повышение точности наведения ракеты за счет компенсации фазовой связи ее каналов управления. 3 ил.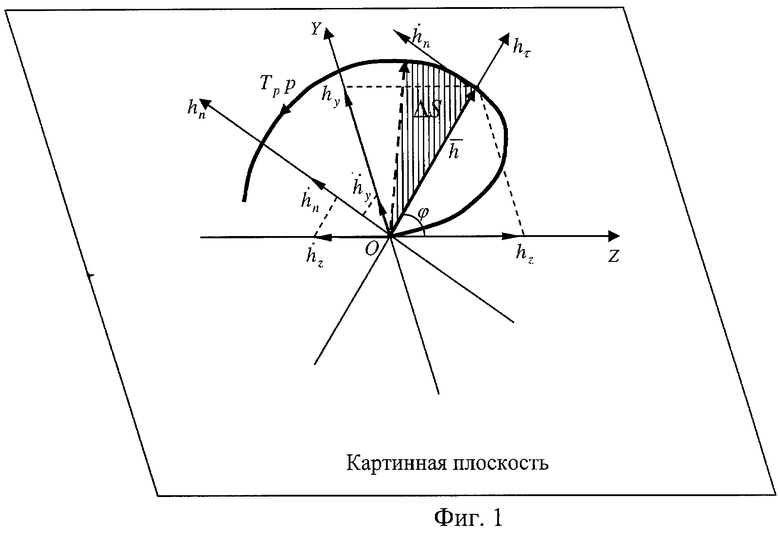
Способ формирования сигналов управления ракетой, включающий в каждом канале управления по высоте и направлению формирование сигнала, пропорционального отклонению ракеты от заданной линии наведения, формирование команды управления ракетой, пропорциональной сигналу отклонения ракеты от заданной линии наведения, и последующее формирование по командам управления в каналах управления по высоте и направлению сигналов управления рулевыми органами ракеты, отличающийся тем, что команды управления ракетой в каналах управления по высоте и направлению преобразуют в текущем времени наведения ракеты так, что радиус-вектор, образованный командами управления, поворачивается на угол, величина которого пропорциональна текущей площади сектора, описываемого в плоскости измеренного отклонения ракеты радиус-вектором, образованным сигналами отклонения ракеты от заданной линии наведения в каналах управления по высоте и направлению, от своего положения в момент начала формирования сигналов отклонения ракеты от заданной линии наведения, а знак угла поворота вектора команд управления определяют в соответствии со знаком приращения площади указанного сектора с учетом текущего направления вращения радиус-вектора, образованного сигналами отклонения ракеты от заданной линии наведения.
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2290591C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2192603C2 |
| US 5647559 A, 15.07.1997 | |||
| US 6672533 B1, 06.01.2004 | |||
| Гидравлический возбудитель колебаний | 1982 |
|
SU1087201A1 |

