Изобретение относится к авиационной технике, а именно к управлению дистанционно-пилотируемыми летательными аппаратами (ДПЛА) вертикального взлета и посадки.
Известны разработки зарубежных ДПЛА вертикального взлета и посадки (см. Aviation Week and Spase Technology, 1988, т.128, N 18, с. 72 или тот же источник 21.05.1990, т. 132, N 21, с. 24).
Способ управления указанными ДПЛА, реализуемый системой их управления, состоит в независимом управлении положением каждой лопасти относительно ее продольной оси. Вычисление величины отклонения в пространстве каждой лопасти осуществляется в реальном масштабе времени быстродействующей бортовой ЦВМ. За счет управления дифференцированным общим шагом верхнего и нижнего винтов обеспечивается управление рысканием. Перемещение ЛА в продольной и поперечной плоскостях регулируется за счет изменения циклического шага лопастей несущих винтов.
Система управления содержит курсовертикаль, измеритель скорости полета, высотомер, сигналы с датчиков которых поступают на бортовую ЦВМ. Выработанные ЦВМ управляющие сигналы поступают на исполнительные органы управления летательным аппаратом, т.е. на рулевые машины и автомат перекоса.
Недостатком указанных аппаратов являются невысокие динамические характеристики управляемого полета в горизонтальной плоскости. Кроме того, сложная система управления, для реализации которой необходимо непрерывное измерение многочисленных параметров полета, вычисление управляющих команд, решение Эйлеровской пространственной системы движения ЛА, не позволяет cоздавать высоконадежные и дешевые ДПЛА.
Создать аналогичные отечественные ЛА не представляется возможным из-за сложности технической реализации системы управления данного класса аппаратов, главным образом из-за отсутствия отечественных быстродействующих БЦВМ.
Цель изобретения - упрощение структуры системы управления и исключение из состава аппаратуры и конструкции ЛА, быстродействующей ЦВМ, исполнительных органов поворота лопастей (автомата перекоса верхнего и нижнего винтов с тягами и рулевыми машинами), а также замена поворотных лопастей несущих винтов на "жесткие" соосные несущие винты с неподвижными лопастями, что обеспечивает сокращение стоимости.
Предлагаемый способ включает измерение текущих параметров полета, определение отклонения фактических значений от расчетных и осуществление управляющих воздействий на органы управления летательного аппарата.
Отличие предлагаемого способа от известного состоит в том, что осуществляют измерение текущих значений курсового угла, скорости и высоты полета, определяют разность заданного и измеренного значений указанных параметров, а затем на основании вычисленных величин регулируют курсовой угол с помощью газодинамических органов управления, размещенных в хвостовой части ЛА, регулируют скорость полета путем разворота ЛА на необходимый отрицательный угол атаки с помощью аналогичной газодинамической системы управления, размещенной также в хвостовой его части, и одновременно с разворотом изменяют число оборотов двигателя, пр этом высоту полета регулируют изменением числа оборотов двигателя.
Система управления ДПЛА с соосными несущими винтами (СНВ) содержит курсовертикаль, измеритель скорости полета, высотомер и устройство приема заданных режимов полета, выходы которых связаны с соответствующими входами устройства сравнения и выработки управляющих команд, при этом выходы последнего подсоединены к соответствующим входам органов управления по курсу, тангажу и крену и к регулятору оборотов двигателя.
Отличием предлагаемой системы является то, что органы управления по курсу, тангажу и крену выполнены в виде соответствующих струйных рулевых машин, работающих от автономного компрессора, регулятор оборотов двигателя выполнен в виде электродвигателя управления заслонкой карбюратора, а лопасти несущих винтов жестко закреплены на валу двигателя.
Предлагаемые способ и устройство управления дистанционно-пилотируемым летательным аппаратом с соосными несущими винтами обладают высокими быстродействием и качеством пилотирования, не требуя при этом наличия дорогостоящей и сложной ЦВМ, а также автомата перекоса, так как управление ЛА производится в соответствии с сигналами на выходе устройства сравнения и выработки управляющих команд, пропорциональными разности заданного и измеренного значений курсового угла, скорости полета и высоты полета.
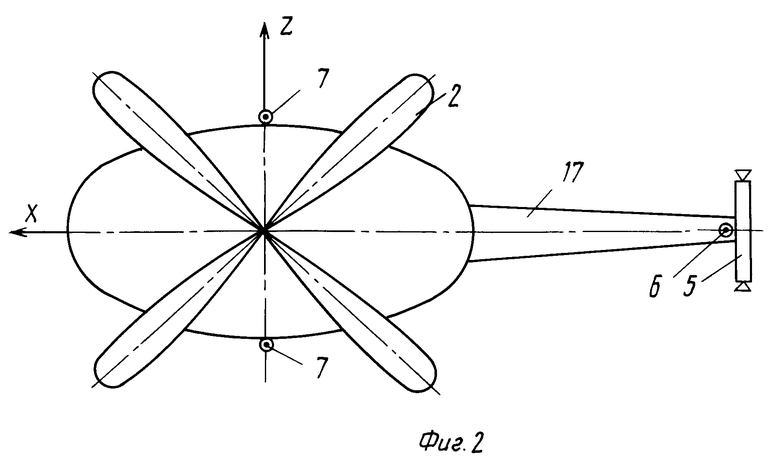
На фиг.1 изображена схема ДПЛА с соосными несущими винтами; на фиг.2 - то же, вид сверху; на фиг.3 - структурная схема предлагаемой системы.
ДПЛА с СНВ включает корпус 1 с шасси и с соосными несущими винтами 2, лопасти которых жестко прикреплены к валу 3 поршневого двигателя 4. ДПЛА имеет газодинамические органы управления, выполненные в виде струйных рулевых машин курса 5, тангажа 6 и крена 7, питаемых от автономного компрессора 8. В качестве регулятора оборотов поршневого двигателя 4 использован электродвигатель 9 управления заслонкой карбюратора, регулирующий угол ее поворота. Компрессор 8 соединен с редуктором 10, установленным на валу 3 поршневого двигателя 4, через клиноременную передачу 11. В систему управления ДПЛА с СНВ входит устройство 12 сравнения и выработки управляющих команд, устройство 13 приема заданных режимов полета, а также курсовертикаль 14, измеритель 15 скорости полета и высотомер 16.
Выходы курсовертикали 14, измерителя 15, высотомера 16 и устройства 13 связаны с соответствующими входами устройства 12, выходы которого соединены с входами струйных рулевых машин 5, 6, 7, создающих управляющие моменты в каналах курса, тангажа и крена соответственно. Четвертый выход устройства 12 связан с входом регулятора оборотов поршневого двигателя (электродвигателя 9).
Управление ДПЛА с СНВ осуществляется следующим образом.
В процессе полета ДПЛА непрерывно измеряется курсовой угол β , скорость V и высота Н полета. В случае возникновения рассогласования между заданным и измеренным параметром определяется величина отклонения (разность) от заданного параметра. При возникновении необходимости управления ДПЛА в канале рысканья после вычисления разности между заданным и измеренным курсовым углом производят разворот ДПЛА на заданный угол и его стабилизацию с помощью реактивной силы, создаваемой струйной рулевой машиной 5, установленной на балке 17 в хвостовой части ДПЛА. Разворот по крену производится аналогично выше описанному с помощью струйных рулевых машин 7, установленных по бортам ДПЛА.
При отклонении от заданной скорости полета производят разворот ДПЛА на необходимый отрицательный угол атаки при помощи струйной рулевой машины 6 тангажа, осуществляя тем самым разворот вектора тяги, создаваемой соосными несущими винтами 2. Для компенсации уменьшения (или увеличения) вертикальной составляющей силы, создаваемой винтами 2, одновременно подается команда на электропривод 9 управления заслонкой карбюратора для повышения (или снижения) числа оборотов поршневого двигателя 4 и, как следствие, тяги винтов 2. Установившееся число оборотов двигателя 4 принимается таким, которое обеспечивает величину вертикальной составляющей силы тяги винтов 2, равную текущей массе ДПЛА. Разворот ДПЛА по углу атаки производится посредством струйной рулевой машины 6, установленной на балке 17. Управление ДПЛА по высоте полета осуществляется изменением числа оборотов поршневого двигателя 4 за счет поворота заслонки карбюратора электродвигателем 9, увеличивая или уменьшая вертикальную составляющую тяги соосных винтов 2.
Система управления ДПЛА с СНВ работает следующим образом.
Непрерывно измеряемые параметры полета - курсовой угол β, скорость V и высота Н полета поступают на вход устройства 12, где измеренные значения сравниваются с заданными, которые определяются устройством 13. Устройство выработки команд представляет собой четырехканальное устройство умножения с автономными каналами выработки команд по курсу, тангажу, крену и по числу оборотов двигателя. По каждому из задаваемых оператором и измеряемых на борту ДПЛА параметров в устройстве сравнения вычисляется разность между заданным и измеренным параметром sign Δi=Pзадi-Pизмi, где sign Δi - знак и величина (модуль) разности заданного Pзадi и измеренного Ризмi i-того параметра. Величина sign Δi по каждому каналу поступает в устройство выработки команд, где происходят ее преобразование и масштабирование и тем самым превращение в команду для соответствующего органа управления по следующей зависимости: sign Δi= Ai ˙δi, где Ai - коэффициент масштаба (тарировки), а δi - величина команды управления, отсюда δi= sign Δi. Обозначив
sign Δi. Обозначив  =Ki - коэффициент усиления i-го канала, получают зависимость δi= Ki ˙signΔi. , которая является типичной операцией умножения, выполняемой в каждом канале устройства. Устройство умножения может быть выполнено различными способами: магнитным, электрическим или полупроводниковым усилителем. Управление ДПЛА может осуществляться по радиокомандам с наземного пульта управления. Выработанный устройством 12 управляющий сигнал поступает на вход струйной рулевой машины курса 5 или тангажа 6, или крена 7, или же на электродвигатель 9 управления заслонкой карбюратора поршневого двигателя 4. Управление ДПЛА ведется в соответствии с изложенным выше описанием способа управления ДПЛА. Непрерывный контроль за параметрами полета, осуществляемый курсовертикалью 14, измерителем скорости полета 15 и высотомером 16 и коррекция параметров полета, осуществляемая по сигналам с устройства 12 сравнения и выработки управляющих команд посредством струйных рулевых машин 5, 6, 7 и изменением числа оборотов поршневого двигателя 4, позволяет получить высокое качество управления ДПЛА при упрощении и удешевлении конструкции системы его управления.
=Ki - коэффициент усиления i-го канала, получают зависимость δi= Ki ˙signΔi. , которая является типичной операцией умножения, выполняемой в каждом канале устройства. Устройство умножения может быть выполнено различными способами: магнитным, электрическим или полупроводниковым усилителем. Управление ДПЛА может осуществляться по радиокомандам с наземного пульта управления. Выработанный устройством 12 управляющий сигнал поступает на вход струйной рулевой машины курса 5 или тангажа 6, или крена 7, или же на электродвигатель 9 управления заслонкой карбюратора поршневого двигателя 4. Управление ДПЛА ведется в соответствии с изложенным выше описанием способа управления ДПЛА. Непрерывный контроль за параметрами полета, осуществляемый курсовертикалью 14, измерителем скорости полета 15 и высотомером 16 и коррекция параметров полета, осуществляемая по сигналам с устройства 12 сравнения и выработки управляющих команд посредством струйных рулевых машин 5, 6, 7 и изменением числа оборотов поршневого двигателя 4, позволяет получить высокое качество управления ДПЛА при упрощении и удешевлении конструкции системы его управления.
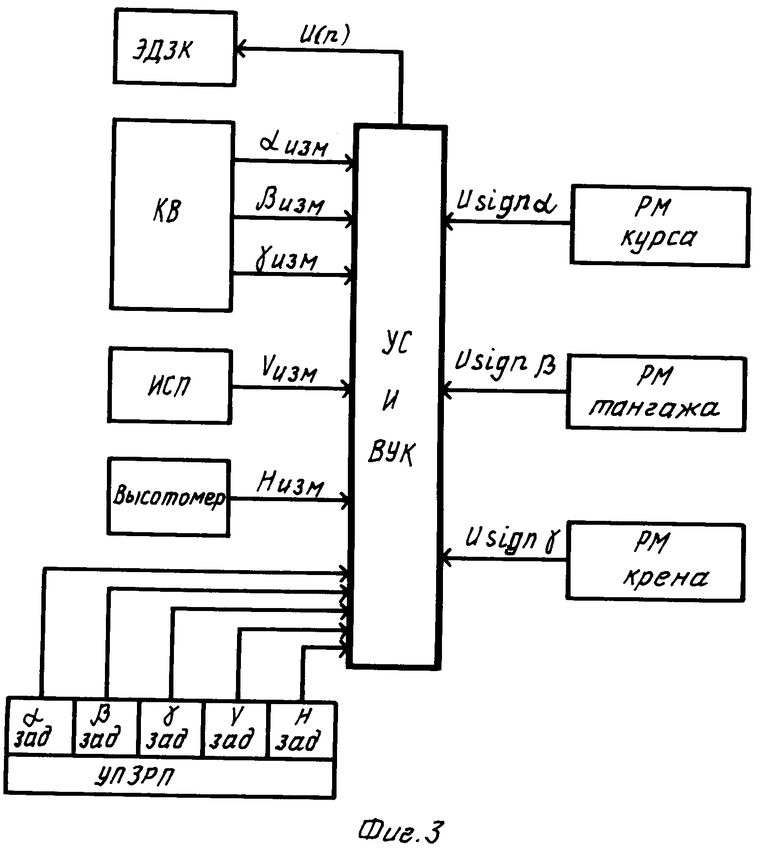
Блок-схема системы управления ДПЛА представлена на фиг.3.
На фиг. 3 введены следующие обозначения: КВ - курсовертикаль; ИСП - измеритель скорости полета; УСиВУК - устройство сравнения и выработки управляющих команд; УПЗРП - устройство приема заданных режимов полета; ЭДЗК - электродвигатель заслонки карбюратора; αизм,βизм,γизм- измеренные на борту ЛА углы атаки, скольжения и крена; Vизм - измеренная на борту скорость полета; Низм - измеренная на борту высота полета; αзад,βизм,γизм- заданные оператором значения углов атаки, скольжения и крена; Vзад - заданная оператором скорость полета; Нзад - заданная оператором высота полета U ˙signα ; U˙sign β; U˙sign γ - выработанные на борту команды управления РМ, где U= (αзад-αизм)˙К; К - коэффициент пропорциональности; U(n) - выработанная на борту команда управления оборотами ПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ПРОДОЛЖИТЕЛЬНОСТИ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403184C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| СИСТЕМА КУРСА И ВЕРТИКАЛИ И СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО КУРСА | 1994 |
|
RU2085850C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045741C1 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СТАРТА РАКЕТЫ С САМОЛЕТА | 1992 |
|
RU2068169C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
Изобретение относится к авиационной технике, а именно к управлению дистанционно-пилотируемыми летательными аппаратами /ДПЛА/ вертикального взлета и посадки. Способ и система управления ДПЛА позволяет создать высоконадежные дешевые ДПЛА. Способ управления ДПЛА состоит в создании управляющих моментов газодинамическими органами управления по курсу, тангажу и крену, а также в изменении направления вектора тяги ДПЛА за счет разворота его по углу атаки и изменении тяги несущих винтов изменением оборотов двигателя. При этом все управляющие воздействия осуществляются в соответствии с отклонениями текущих параметров полета от заданных. Система управления, реализующая способ, включает струйные рулевые машины курса 5, тангажа 6 и крена и электродвигатель 9 управления заслонкой карбюратора поршневого двигателя ДПЛА. Лопасти несущих винтов 2 жестко установлены на валу 3 поршневого двигателя 4. Работа исполнительных органов системы управления осуществляется по командам устройства 12 сравнения и выработки управляющих команд, на вход которого подаются сигналы параметров полета, измеренные курсовертикалью 14, измерителем 15 скорости полета и высотомером 16, а также заданные значения этих параметров от устройства 13 приема заданных режимов полета. 2 с.п.ф-лы, 3 ил.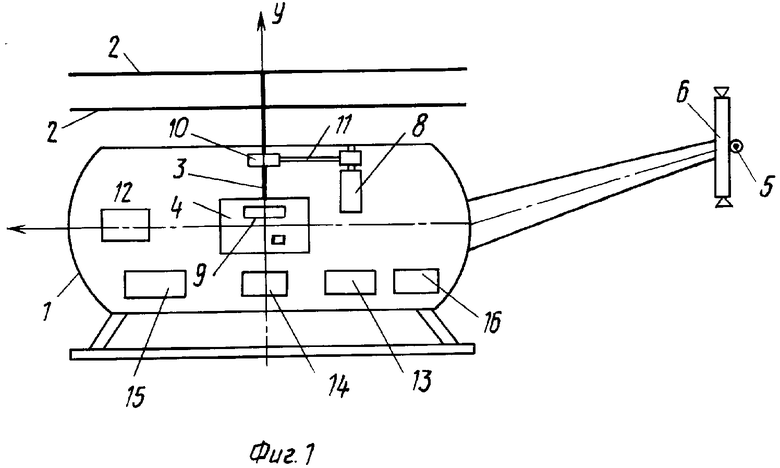
| Aviation Week and Spase Technology, 1988, т.128, N 18, с.72. |
