Изобретение относится к методам радиолокационного обнаружения воздушных объектов (ВО), и в частности - к методам обнаружения беспилотных летательных аппаратов (БЛА) с малой радиолокационной заметностью.
Известен типовой способ обнаружения воздушных объектов, в том числе и БЛА, заключающийся в излучении в пространство с помощью активной радиолокационной станции (РЛС) импульсных зондирующих сигналов, отражении их от ВО, приеме отраженных сигналов антенной системой РЛС, фильтрации отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, сравнении отфильтрованных отражений с порогом и в случае превышения установленного порога - принятии решения о том, что обнаружен движущийся ВО [1-3].
Данный способ используется в большинстве РЛС старого парка и обладает тем недостатком, что достоверное обнаружение возможно только в случае отражений электромагнитных волн (ЭМВ) от типовых объектов с эффективной площадью рассеяния (ЭПР) порядка единиц квадратных метров. В случае же отражения ЭМВ от БЛА, ЭПР которых может составлять от десятых до сотых или тысячных долей квадратного метра, мощности отраженных сигналов для превышения порога обнаружения не хватает, и обнаружение таких объектов невозможно.
Известен также способ обнаружения малозаметных ВО (в том числе и БЛА), предполагающий в отличие от описанного выше способа накопление отражений от ВО, полученных в разных периодах повторения импульсов РЛС [4].
Способ обнаружения воздушных объектов, в том числе и БЛА, заключается в повышении частоты повторения импульсов Fи (снижении величины периода повторения импульсов Ти) до такой величины, чтобы при заданной скорости вращения антенны РЛС, то есть при заданной скорости обзора воздушного пространства минимальное число импульсов Nи мин, принимаемых после отражения от ВО, было достаточным для обнаружения малозаметного ВО с заданной вероятностью. При выборе повышенной частоты повторения импульсов Fи используют выражение [4, с. 71-72, 89-90]

где Δβ и Δε - величины секторов обзора пространства по азимуту β и углу места ε; Тобз - период обзора пространства; Θβ0,5 и Θε0,5 - ширина диаграммы направленности антенны (ДНА) в азимутальной и угломестной плоскостях по уровню половинной мощности.
Вполне очевидно, что в РЛС кругового обзора сканирования по углу места ε не производится, то есть Δε=Θε0,5, вследствие чего для выбора частоты повторения Fи можно использовать упрощенное выражение

Согласно описываемому способу излучают в пространство с помощью РЛС импульсные зондирующие сигналы с повышенной частотой повторения импульсов Fи, принимают отраженные от ВО сигналы антенной системой РЛС, проводят фильтрацию отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, когерентно суммируют Nи мин отраженных отфильтрованных сигналов, сравнивают результат суммирования с порогом и в случае превышения установленного порога принимают решение о том, что обнаружен движущийся ВО. Когерентное суммирование сигналов предполагает их сложение по амплитуде с учетом фазы. Отраженные от ВО сигналы в пределах интервала Тк когерентности (5 мс) синфазны, а шумы в каждый момент времени имеют случайную фазу. Поэтому результат суммирования полезных отраженных от ВО сигналов всегда превышает результат суммирования шумов, что приводит к улучшению характеристик обнаружения [1-4]. Когерентное суммирование (то есть, другими словами, накопление или сложение) отраженных сигналов позволяет при использовании данного способа превысить порог обнаружения даже в случае малой отражающей способности ВО. Некогерентное накопление отраженных сигналов предполагает сложение их только по амплитуде без учета фазы. На каждом отсчете дальности отраженные сигналы каждого периода повторения имеют определенную значащую амплитуду, а шумы вследствие случайного распределения имеют в каждом отсчете дальности то возрастающую, то убывающую амплитуду. Поэтому в отсчетах дальности с полезными отраженными сигналами сложение одноэлементных (принадлежащих одному и тому же элементу дальности) сигналов приводит в общем случае к большему результату, чем в отсчетах, содержащих только шумовые составляющие. Когерентное сложение более продуктивно, но ограничено по времени интервалом когерентности Тк. Некогерентное накопление может проводиться гораздо длительнее некогерентного и ограничено только влиянием радиальной скорости ВО, которая обуславливает изменение положения отраженного сигнала на оси дальности (времени).
Указанный способ обнаружения лучше типового, но не позволяет эффективно обнаруживать малозаметные БЛА, поскольку отсутствует какой-либо метод или методика по установлению необходимого числа накапливаемых импульсов Nи мин в условиях непредсказуемого снижения радиолокационной заметности ВО (БЛА). К тому же в современных РЛС обнаружения число когерентно накапливаемых импульсов не превышает 100, чего может быть недостаточно для обнаружения малоотражающих малоразмерных БЛА.
Известен еще один способ обнаружения БЛА [4, с. 90], при котором когерентное накопление необходимого числа импульсов достигается не только увеличением частоты повторения Fи, но и снижением угловой скорости вращения антенны РЛС. Если знать или задать допустимое число импульсов, сложение энергии которых обеспечивает надежное обнаружение БЛА с вероятностью не ниже требуемой, то для числа nа оборотов антенны РЛС за одну минуту по азимуту, согласно [4, с. 90] для обеспечения требуемого результата накопления должно выполняться неравенство

Чем больше требуемое (необходимое) число Nи мин накапливаемых отраженных импульсов, тем ниже должна быть скорость вращения антенны. Поэтому способ обнаружения ВО (БЛА) предполагает снижение скорости обзора воздушного пространства за счет замедления скорости вращения антенны в секторах, где предполагается наличие слабоотражающих ВО, в том числе и БЛА. Если же таковые секторы не определены особенностями обстановки или наличием предполагаемых направлений появления БЛА, то скорость вращения уменьшается для всех азимутальных направлений, т.е. устанавливается низкой для полного кругового обзора. В этом случае сектор снижения угловой скорости вращения составляет 360°. Реально наиболее опасное направление появления БЛА является известным. Если таких направлений несколько, то обнаружение в таких секторах проводится одинаковым способом. В остальном же способ обнаружения придерживается традиционных принципов.
Таким образом, указанный способ обнаружения воздушных объектов, в том числе и БЛА, заключается в следующем. Умышленно одновременно снижают по величине два параметра РЛС, а именно уменьшают период повторения импульсов Ти и снижают скорость вращения ωβ антенны РЛС по азимуту β до такой величины, чтобы число импульсов Nи мин, суммируемых (когерентно или некогерентно) после отражения от ВО, было достаточным для обнаружения малозаметного БЛА с заданной вероятностью. Согласно этому способу традиционно в процессе замедленного вращения антенны по азимуту в секторе (секторах) предполагаемого появления БЛА излучают в пространство с помощью РЛС импульсные зондирующие сигналы (с повышенной частотой повторения импульсов Fи), принимают отраженные от ВО сигналы антенной системой РЛС, проводят фильтрацию отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, суммируют Nи мин отраженных отфильтрованных сигналов, сравнивают результат суммирования с порогом и в случае превышения установленного порога принимают решение о том, что обнаружен движущийся ВО, который может быть в том числе и беспилотным летательным аппаратом.
Следует подчеркнуть, что в современных активных (т.е. излучающих и принимающих сигналы) РЛС такой способ излучения сигналов достаточно часто применяется. Как пример можно привести РЛС кругового обзора типа 9С18М1, в которой периоды или темпы одного оборота антенны по азимуту вкруговую (полный обзор пространства) составляют 4,5 с, 6 с и 6-18 с при самом низком темпе [5]. Время облучения ВО может изменяться в данной РЛС от 0,02 до 0,053 с. Ширина ДНА по азимуту составляет 1,6°. Число импульсов, которые накапливаются некогерентно в соответствии с принципом работы РЛС 9С18М1, составляет от 16 до 84. Частота повторения импульсов может принимать значения 0,8 кГц или 1,6 кГц. Очевидно, что при обнаружении ВО типа БЛА целесообразно использовать самый низкий темп обзора с накоплением 84 импульсов. При низком темпе обзора время просмотра всего воздушного пространства существенно увеличивается, и обновление радиолокационной информации происходит редко, что негативно сказывается на результатах обнаружения БЛА. Общим недостатком всех перечисленных способов является то, что на больших дальностях мощности (энергии) отраженных и суммируемых импульсов вследствие затухания ЭМВ в атмосфере (даже при самых малых Ти и угловой скорости ωβ) может стать недостаточно для обнаружения слабоотражающих БЛА. Таким образом, описанный способ обнаружения малозаметных БЛА нуждается в совершенствовании.
Задачей изобретения является развитие и совершенствование известного способа обнаружения БЛА, обеспечивающие более высокие характеристики обнаружения в условиях затухания ЭМВ в атмосфере при больших дальностях.
Для решения поставленной задачи предлагается совместно с активной РЛС использовать специальный вспомогательный БЛА обнаружения (БЛАО) с пассивным радиолокатором, настроенным на ту же длину волны (частоту), что и основная РЛС обнаружения (кругового обзора). Данный БЛАО предлагается заблаговременно запускать в направлении предполагаемого несанкционированного появления представляющих интерес беспилотных летательных аппаратов с малой ЭПР и синхронизировать угловое направление излучения зондирующих сигналов РЛС с угловым направлением приема отраженных сигналов антенной БЛАО. При этом БЛАО должен иметь постоянную устойчивую радиосвязь с основной РЛС и передавать на нее точные координаты своего местонахождения для того, чтобы отраженные от БЛАО сигналы не воспринимались как сигналы интересующих ВО, в том числе типа БЛА. Дальность нахождения (барражирования) БЛАО выбирается близкой к дальней границе зоны обнаружения воздушных объектов основной радиолокационной станцией. Например, если дальняя граница зоны обнаружения РЛС составляет 50 км, то БЛАО должен находиться и вести обнаружение на дальности порядка 48-49 км от РЛС, то есть иметь удаление от дальней границы обнаружения ВО, равное единицам километров. Это объясняется тем, что обнаружение ВО целесообразно проводить как можно раньше и на наибольшей дальности, а обнаружение ВО (БЛА) на дальности, превышающей дальнюю границу зоны обнаружения, не входит в задачи РЛС, то есть не востребовано функциями РЛС.
Система управления антенной радиолокатора БЛАО, находясь на РЛС, должна быть связана с бортовой системой поворота пассивной приемной антенны БЛАО устойчивой кодированной линией радиосвязи, передающей сигналы управления из РЛС на борт БЛАО. Если же антенна БЛАО представляет собой фазированную антенную решетку, то указанная связь должна быть организована между системой управления антенной радиолокатора БЛАО (расположенной на РЛС) и системой изменения углового положения основного луча диаграммы направленности фазированной антенной решетки БЛАО. В перерывах между управляющими сигналами РЛС с борта БЛАО предлагается передавать сигналы в обратном направлении с координатами обнаруженных ВО в пределах зоны обнаружения РЛС.
В азимутальном секторе, биссектриса которого является предполагаемым направлением несанкционированного появления БЛА, предполагается снижать угловую скорость вращения антенны РЛС и увеличивать частоту повторения импульсов РЛС. Степень изменения этих параметров должна ограничиваться возможностью сохранения однозначности измерения координат ВО [1-4,6,7] и осуществления обзора воздушного пространства за допустимое (отведенное нормативом) время [1,3,4,6,7]. Приемная система радиолокатора БЛАО должна быть настроена на ту же несущую частоту, что передатчик основной активной РЛС обнаружения.
С помощью управляемой по азимуту антенны радиолокатора БЛАО (с помощью управляемого по азимуту основного луча фазированной антенной решетки БЛАО) предлагается принимать отраженные от ВО (БЛА) сигналы, проводить фильтрацию отраженных сигналов по частоте для выделения отражений от движущихся БЛА на фоне отражений от неподвижных местных предметов, суммировать Nи мин отраженных отфильтрованных сигналов, а затем сравнивать результат суммирования с порогом обнаружения П1. В случае превышения установленного порога П1 принимается решение о том, что обнаружен движущийся ВО, которым может быть в том числе и БЛА. Традиционным способом [1-4,6,7] предлагается определять дальностную и азимутальную координаты каждого обнаруженного ВО. Координаты дальности и азимута каждого обнаруженного воздушного объекта предлагается передавать с борта БЛАО по линии радиосвязи на РЛС.
Отраженные сигналы принимаются также антенной РЛС. Если в ДНА РЛС попадает типовой ВО с достаточной (значительной) ЭПР, то принятые антенной РЛС и просуммированные отраженные сигналы должны превысить порог обнаружения РЛС П2. В случае превышения накопленным сигналом порога П2 аппаратными средствами активной РЛС принимается решение о наличии в зоне обнаружения типовых ВО с нормальной (не пониженной) отражающей способностью. Традиционными способами [1-4,6,7] определяются дальность и азимут каждого обнаруженного ВО.
Координаты обнаруженных с помощью БЛАО и РЛС воздушных объектов сравниваются. Эта операция называется отождествлением обнаруженных ВО. Если координаты ВО, обнаруженных РЛС и БЛАО совпадают или отличаются не более чем на величину строба отождествления, то принимается решение о том, что это типовой ВО. Если координаты ВО, обнаруженного БЛАО, не совпадают с координатами объектов, обнаруженных РЛС, то принимается решение, что обнаруженный с помощью БЛАО воздушный объект является беспилотным летательным аппаратом, то есть что с помощью БЛАО обнаружен БЛА с малой радиолокационной заметностью.
Предлагаемый способ имеет преимущества перед прототипом [4, с. 90], заключающиеся в возможности обнаружения мини- и микро-БЛА с малой радиолокационной заметностью на дальностях, составляющих десятки-сотни км, чего невозможно осуществить обычной типовой РЛС кругового обзора по причине затухания отраженных от БЛА сигналов в атмосфере.
Таким образом, предлагаемый радиолокационный способ обнаружения БЛА с малой радиолокационной заметностью должен состоять из следующих последовательно выполняемых операций:
1. Умышленно в активной РЛС обнаружения (кругового обзора) в азимутальном секторе, биссектриса которого является предполагаемым направлением несанкционированного появления БЛА, заблаговременно снижают по величине два параметра, а именно уменьшают период повторения импульсов Ти и снижают скорость вращения ωβ антенны РЛС по азимуту β до предельно малых величин, при которых сохраняется возможность однозначно определять координаты ВО и осуществлять обзор воздушного пространства за допустимое время.
2. Заблаговременно запускают в направлении предполагаемого несанкционированного появления представляющих интерес беспилотных летательных аппаратов с малой отражательной способностью (радиолокационной заметностью) специальный вспомогательный БЛА обнаружения (БЛАО) с пассивной работающей на прием радиолокационной станцией, работающей на той же несущей частоте, что и основная РЛС обнаружения, оснащенный управляемой (сканирующей) по азимуту приемной антенной, либо приемной фазированной антенной решеткой (ФАР), способной управлять азимутальным положением основного лепестка ее диаграммы направленности.
3. Дальность нахождения (барражирования) БЛАО выбирают на 1-2 км меньшей, чем дальняя граница зоны обнаружения РЛС, то есть максимальная приборная дальность активной РЛС, на которой предполагается обнаруживать БЛА, совершающие несанкционированные полеты.
4. Конструктивно предусматривают наличие постоянной устойчивой радиосвязи БЛАО с основной РЛС обнаружения, посредством которой с помощью управляющих сигналов РЛС управляют траекторией полета БЛАО, то есть его местонахождением. Кроме того с помощью передаваемых на борт БЛАО управляющих сигналов РЛС синхронизируют угловое направление основного лепестка излучающей зондирующие сигналы антенны РЛС с угловым направлением основного лепестка диаграммы направленности принимающей отраженные сигналы антенны (в том числе ФАР) БЛАО. Иначе говоря, согласовывают и синхронизируют (по азимуту β) угловое направление основного лепестка антенны РЛС с угловым направлением (по азимуту β) основного лепестка принимающей отраженные сигналы антенны БЛАО. В случае зеркальной, рупорной, спиральной, вибраторной и т.п.антенны (антенны старого парка, у которой угловое положение основного лепестка имеет жесткую конструктивную связь с используемой апертурой) БЛАО под угловым направлением ее основного луча (лепестка) диаграммы направленности понимают так называемое равносигнальное направление апертуры антенны.
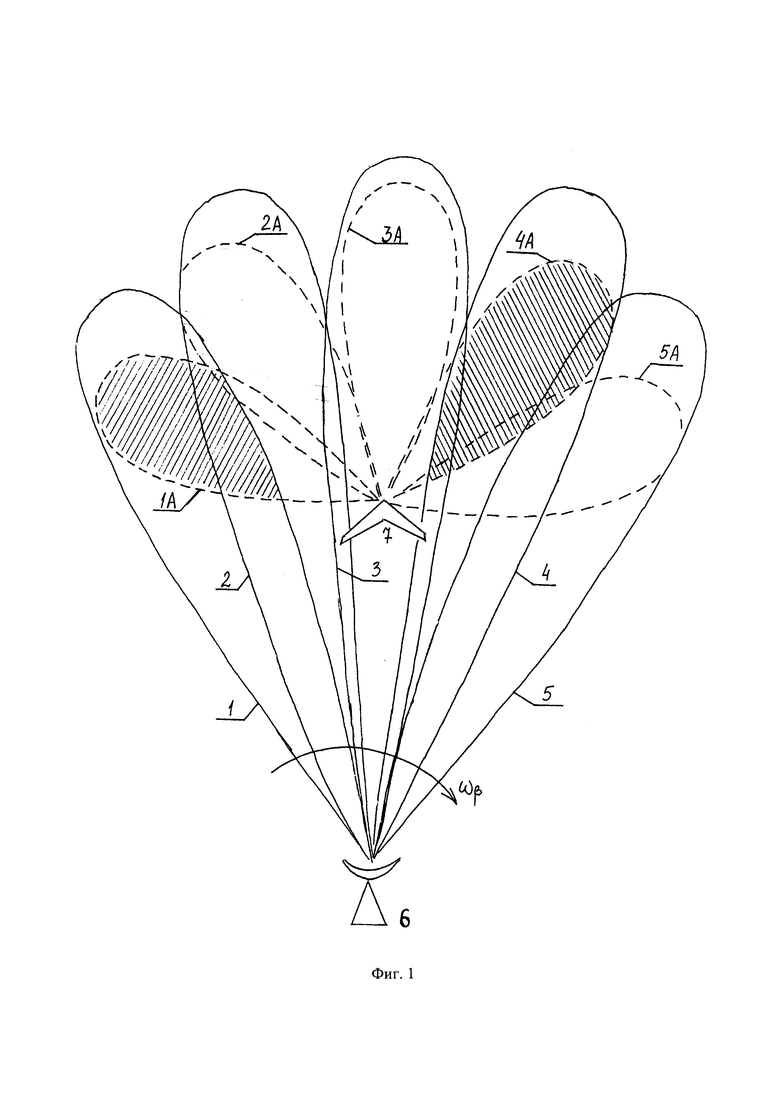
Идея и смысл синхронизации основных лепестков ДНА РЛС и БЛАО иллюстрируются фиг. 1. На нем позициями 1, 2, 3, 4 и 5 показаны последовательные положения основного лепестка ДНА РЛС 6, а позициями 1А, 2А, 3А, 4А и 5А обозначены синхронные угловые положения основного лепестка ДНА БЛАО 7. Предполагается рассмотрение сверху горизонтальных сечений основных лепестков ДНА. Понятно, что основной лепесток излучающей антенны РЛС 6 при вращении с угловой скоростью ωβ последовательно занимает угловые положения от 1 до 5 и т.д. Синхронно с ним основной лепесток принимающей антенны радиолокатора БЛАО 7 занимает угловые положения от 1А до 5А и т.д. При положении 1 основного лепестка ДНА РЛС 6 основной лепесток антенны радара (радиолокатора) БЛАО 7 имеет положение 1А. При положении 2 основного лепестка ДНА РЛС 6 основной лепесток антенны радара БЛАО 7 имеет положение 2А и т.д. Заштрихованными областями показаны зоны (области) пересечения основных лепестков ДНА РЛС 6 и БЛАО 7 в первом и четвертом положениях.
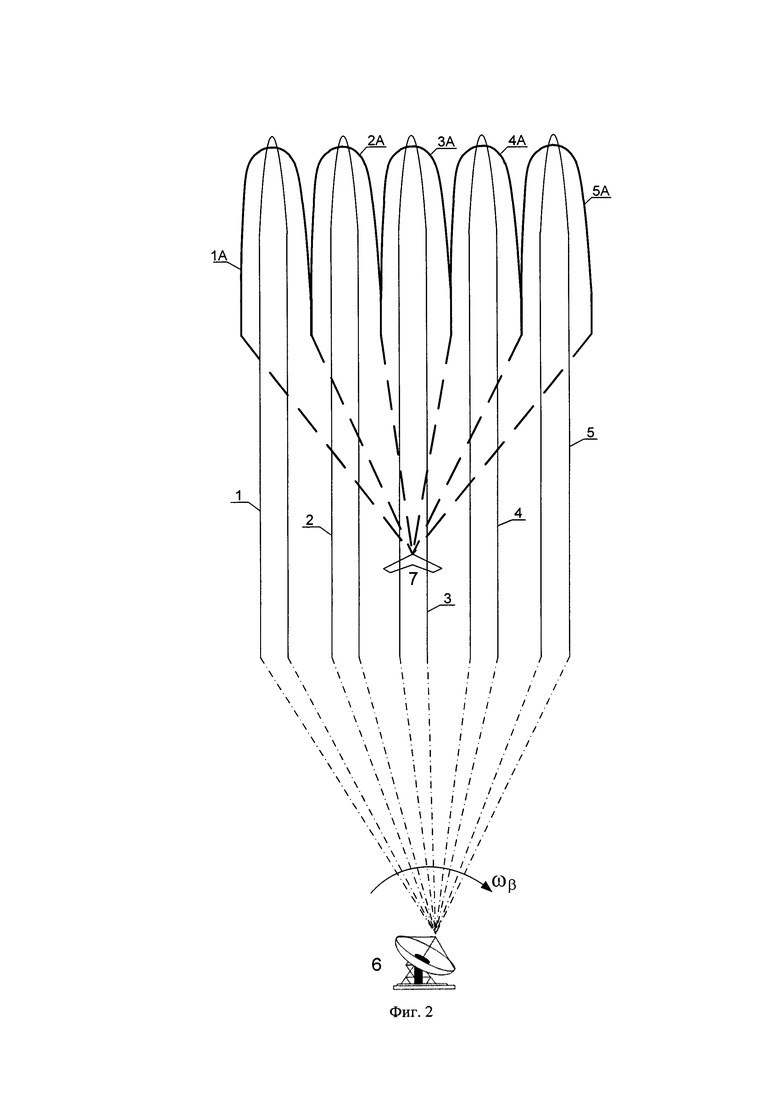
В действительности необходимо рассматривать лепестки (лучи) ДНА РЛС и БЛАО для условий дальней зоны [1-4,6,7]. В дальней зоне лепестки ДНА будут занимать почти параллельные азимутальные положения, как показано на фиг. 2. Причем ширина лепестков ДНА РЛС 6 за счет больших габаритов антенны РЛС может быть существенно меньшей, чем ширина лепестков антенны БЛАО 7. Это не противоречит возможности эффективного приема отраженных от ВО сигналов. Понятно, что имеют место не только проиллюстрированные положения ДНА, но и промежуточные между изображенными угловые положения. Показанные на фиг. 2 положения лучей соответствуют их перемещению на величину, равную ширине основного лепестка антенны БЛАО. Главное условие реализации идеи предлагаемого технического решения - постоянное совпадение угловых положений основных лепестков излучающей антенны РЛСМ и принимающей антенны БЛАО, то есть синхронизация угловых положений основных лепестков.
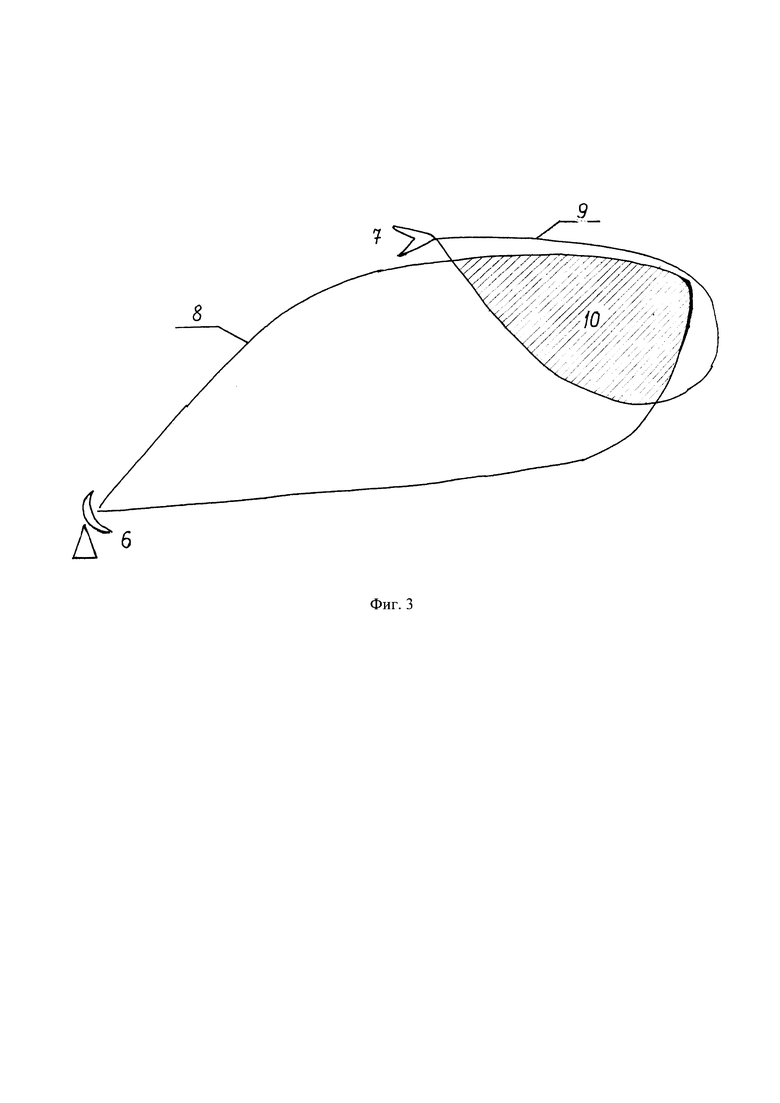
На фиг. 3 показан вариант вертикальных (угломестных) сечений лепестков синхронизированных ДНА РЛС 6 и БЛАО 7. Позицией 8 обозначено вертикальное сечение основного лепестка ДНА РЛС 6. Позицией 9 обозначено вертикальное сечение основного лепестка ДНА БЛАО 7. Заштрихованная область 10 соответствует области пересечения основных лепестков двух ДНА. БЛАО 7 может умышленно находиться выше зоны обнаружения РЛС 6, чтобы отраженные от него сигналы не попадали в приемную систему РЛС. Впрочем БЛАО 7 может находиться и в пределах ДНА РЛС 6, лишь бы ДНА БЛАО имела существенное пересечение с ДНА РЛС.
5. В перерывах между управляющими сигналами РЛС с борта БЛАО передают на РЛС контрольные сигналы о координатах местоположения БЛАО, то есть обеспечивают постоянную передачу с борта БЛАО на РЛС информации о точных координатах местонахождения БЛАО.
6. В процессе замедленного вращения антенны РЛС по азимуту излучают в пространство с помощью антенной системы РЛС импульсные зондирующие сигналы с уменьшенным периодом повторения импульсов Ти.
7. Принимают антенной БЛАО и антенной РЛС от каждого импульсного объема (элемента разрешения по дальности и азимуту) [1-4,6,7] отраженные сигналы, проводят фильтрацию этих отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, суммируют полученное число (Nи мин) отраженных отфильтрованных импульсных сигналов для каждого импульсного объема бортового пассивного радиолокатора БЛАО и активной РЛС обнаружения.
8. Сравнивают результат суммирования сигналов в каждом импульсном объеме БЛАО с установленным для БЛАО порогом П1 обнаружения БЛА с малой отражательной способностью (БЛА с низкой ЭПР). В случае превышения установленного порога П1 на борту БЛАО принимается решение о том, что в соответствующем импульсном объеме БЛАО обнаружен движущийся ВО. Традиционным способом определяют дальностную и азимутальную координаты обнаруженного ВО, то есть дальность и азимут соответствующего импульсного объема.
9. Сравнивают результат суммирования сигналов в каждом импульсном объеме РЛС с установленным для РЛС порогом П2 обнаружения типовых ВО. В случае превышения установленного порога П2 на борту активной РЛС принимается решение о том, что в соответствующем импульсном объеме обнаружен движущийся типовой ВО. Традиционным способом определяют дальностную и азимутальную координаты обнаруженного ВО, то есть дальность и азимут соответствующего импульсного объема активной РЛС.
10. Координаты дальности и азимута каждого обнаруженного ВО передают с борта БЛАО по линии радиосвязи на борт РЛС.
11. Проводят отождествление ВО, обнаруженных активной РЛС и пассивным радиолокатором БЛАО, путем сравнения координат объектов, обнаруженных разными радиолокаторами, то есть основной активной РЛС и пассивным радиолокатором БЛАО. По результатам совпадения координат с точностью до размеров строба отождествления принимают окончательное решение об обнаружении, то есть решение о принадлежности обнаруженного БЛАО воздушного объекта к БЛА с малой отражательной способностью. При этом придерживаются следующего правила: если координаты ВО, обнаруженного БЛАО, не совпадают с координатами ВО, обнаруженных РЛС, то принимают решение о том, что обнаруженный ВО является БЛА с малой радиолокационной заметностью (с малой отражательной способностью). В остальных случаях обнаруженные ВО относят к типовым.
Поясним сущность и достигаемый технический результат (эффект) предлагаемого способа обнаружения БЛА.
В отличие от прототипа отраженные беспилотным летательным аппаратом сигналы принимаются антенной БЛАО на существенно меньшей дальности, что выгодно с точки зрения уменьшения степени затухания отраженных ЭМВ в атмосфере за счет прохождения меньшего расстояния. При этом реализуется выигрыш в энергии (мощности) принятого сигнала, являющегося результатом суммирования (накопления) Nи мин отраженных радиоимпульсов. Однако размеры антенны БЛАО уступают размерам антенны наземной РЛС, что несколько снижает достигаемый выигрыш в энергии принимаемого сигнала. Чем сильнее проявляется первый эффект и слабее второй, тем значительнее результирующий выигрыш в мощности принимаемых сигналов, отраженных БЛА.
Продемонстрируем вышесказанное количественными оценками. Согласно [6, 7] мощность сигнала, принимаемого антенной наземной РЛС, может быть выражена формулой

где Рпер - мощность передатчика наземной РЛС; GРЛС - коэффициент усиления антенны наземной РЛС (одинаковый на передачу и прием при использовании одной и той же антенны); АРЛС - эффективная площадь антенны наземной РЛС; σБЛА _ ЭПР обнаруживаемого БЛА; DРЛС-БЛА - дальность между наземной РЛС и обнаруживаемым БЛА; π - константа (π=3,14159).
В случае приема отраженных от БЛА сигналов антенной БЛАО выражение (4) принимает иной вид, а именно:

где РБЛА - мощность принимаемого сигнала антенной БЛАО; АБЛАО - эффективная площадь антенны БЛАО; ВБЛАО-БЛА - дальность между БЛАО и обнаруживаемым БЛА.
Отношение мощности РБЛА к мощности РРЛС количественно выражает эффект энергетического выигрыша при использовании предлагаемого способа обнаружения БЛА. Это отношение К численно равно

Пусть для примера антенны РЛС и БЛАО имеют форму близкую к круговой (могут быть аппроксимированы кругом). Радиус подобной антенны наземной РЛС может достигать 2 м (диаметр 4 м). Радиус антенны БЛАО не превышает 0,2 м. Пусть обнаружение БЛАО ведется на дальности 50 км. При этом БЛАО может барражировать на расстоянии 1 км от дальней границы зоны обнаружения, то есть на дальности порядка 1 км от обнаруживаемого БЛА. Тогда

Если дальность от РЛС до БЛА увеличить вдвое, то выигрыш по мощности составит величину порядка 100 раз или 20 дБ.
Приведенные выкладки являются приблизительными, так как ЭПР БЛА в направлении на РЛС и в направлении на БЛАО не одинаковы и могут отличаться в единицы раз в любую сторону. Однако в среднем энергетический выигрыш при использовании предлагаемого способа очевиден.
Прокомментируем реализуемость (промышленную применимость) предложенного технического решения по обнаружению БЛА.
Наличие БЛА с дальностью полета десятки-сотни км в настоящее время не вызывает сомнений. Беспилотные аппараты в настоящее время активно применяются во всех областях народного хозяйства, в том числе и в военном деле. Их характеристики широко освещены в открытой печати [8,9].
Способы управления современными БЛА также являются достаточно известными. Их эффективность подтверждается опытом применения БЛА [8] и многочисленными публикациями, раскрывающими принципы управления беспилотными летательными аппаратами [10-14].
Негативное влияние ветра и другие дестабилизирующие факторы, сопровождающие БЛА и его бортовой радиолокатор, устраняется компенсационными методами, без которых невозможно проводить картографирование местности бортовыми радиолокаторами с синтезированной апертурой. Эти методы являются известными [15] и уже применяемыми в бортовых радиолокационных системах БЛА. Так, например, в [16] повествуется о радаре MiSAR, устанавливаемом на разведывательные БЛА. Этот радар с массой около 4 кг и размещается внутри объема в 10 кубических дециметров, потребляя мощность не более 60 Вт. Он может просматривать полосы земной поверхности шириной до 1 км в полосовом режиме, обеспечивая разрешение около 0,5 м. Антенна радара на карданной подвеске нейтрализует рыскание и изменение угла крена несущей платформы. Полученная радаром радиолокационная информация передается по линии передачи данных на наземную станцию управления видовой обработки в реальном масштабе времени.
Примером отечественного бортового радиолокатора с синтезированной апертурой (РСА) является также мини-радиолокатор "Генезис РСА" [17]. Он разработан компанией «Техногенезис» ООО «Лазерные компоненты». Масса его антенны составляет 1 кг, инерциального блока - 1,1 кг, стабилизированного привода антенны - 3,5 кг, вычислителя - 2,2 кг. Общая масса радиолокатора с вычислителем 7,8 кг. Радар ведет радиолокационную съемку земной поверхности полосой 3 км с разрешением 0,5 м. Подобных радиолокаторов в России большое множество. Все они имеют массу, допускающую их использование в составе бортового оборудования БЛА.
Возможность углового перемещения луча диаграммы направленности антенны радиолокатора БЛАО может быть обоснована множеством публикаций о реализации прожекторного (телескопического) режима синтезирования апертуры, который в соответствии со своим принципом предполагает постоянное сканирование лучом ДНА. Об этом дословно свидетельствует источник [18]. Очевидно, что организовать сканирование лучом ДНА конструктивно проще, применяя фазированную антенную решетку. Так в патенте [19] детально описана структура радиолокатора БЛА с высоким разрешением на основе активной фазированной антенной решетки, осуществляющей электронное сканирование лучом (основным лепестком) ДНА в азимутальной и угломестной плоскостях. В данном радиолокаторе предусмотрена стабилизация луча ДНА при эволюциях БЛА в турбулентной атмосфере.
Можно привести множество примеров конкретной реализации радиолокаторов БЛА с телескопическим режимом синтезирования апертуры антенны. Например, в [15, с. 41] описывается радиолокатор Lynx (AN/APY-8), предназначенный в том числе и для БЛА. В нем наряду с полосовым реализован и телескопический режим синтезирования апертуры с разрешением 0,1 м. Этот режим требует изменения положения луча ДНА по азимуту. Далее в [15, с. 42] рассмотрен радиолокатор MiniSAR уменьшенной по сравнению с Lynx массой. Основным режимом работы его РСА является телескопический, при котором луч ДНА сканирует в азимутальной плоскости по определенному закону. Сигналы управления могут изменять этот закон, что является подтверждением возможности управления лучом ДНА радиолокатора БЛА, которое необходимо для реализации предлагаемого способа обнаружения БЛА (с малой радиолокационной заметностью). Приводятся в [15, с. 44-45] сведения и о семействе радиолокаторов NanoSAR, предназначенных для мини-БЛА типа ScanEagle и RQ-11 Raven. В перечень режимов радиолокаторов NanoSAR входит телескопический с изменением углового положения луча ДНА.
Что касается метода отождествления воздушных объектов путем проверки попадания их отметок в стробы отождествления, то этот прием является стандартным и общепринятым. Сведения о его вариантах и принципах реализации приводятся, например, в [20-24]. Существуют и более прогрессивные цифровые способы отождествления, но для реализации предлагаемого способа обнаружения БЛА это не имеет принципиального значения. Прием отнесения отметок от ВО, полученных разными измерителями (разными радиолокаторами), является известным и широко применяемым.
Таким образом, все технические приемы, обеспечивающие предлагаемый способ обнаружения БЛА являются известными и реализуемыми.
Как следует из описания и сущности предлагаемого способа, он действительно улучшает характеристики обнаружения малозаметных беспилотных летательных аппаратов за счет снижения эффекта затухания радиоволн в атмосфере. Способ может быть рекомендован для использования в перспективных РЛС обнаружения малозаметных ВО различного назначения, в том числе аэродромных, морских и других радиолокаторах с большой дальностью действия.
Список использованных источников
1. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. М.: Сов. радио, 1967. Том 1. Основы радиолокации. 456 с.
2. Теоретические основы радиолокации / Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970. - 560 с.
3. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Часть 1. Основы радиолокации. М.: Воениздат, 1983. - 456 с.
4. Справочник по основам радиолокационной техники / Под ред. В.В. Дружинина. М., Воениздат, 1967. 768 с.
5. Радиолокационная станция обнаружения целей 9С18М1. Техническое описание. Книга 1. Общие сведения. ЕФ1.005.029 ТО, 1983. 152 с.
6. Финкельштейн М.И. Основы радиолокации. Учебник для вузов. М.: Сов. радио, 1973. 496 с.
7. Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. М., Сов. Радио, 1970. 680 с.
8. Мосов С.П. Беспилотная разведывательная авиация стран мира: история создания, опыт боевого применения, современное состояние, перспективы развития. Монография. Киев: Изд. дом «Румб», 2008. 160 с.
9. Василии Н.Я. Беспилотные летательные аппараты. Минск: ООО «Попурри», 2003. 272 с.
10. ООО «ТеКнол», http://www.teknol.ru/analitycs/BLA2. (дата обращения 2020-01-14)
11. https://infopedia.su/20x54a6.html. (дата обращения 2021-01-14)
12. Центр беспилотников ARMAIR, https://bespilotnik24.ru/upravlenie-bpla. (дата обращения 2021-01-14)
13. Токарев Ю.П. Методы управления беспилотными летательными аппаратами в общем воздушном пространстве с использованием полетной информации при автоматическом зависимом наблюдении, дис. канд. техн. наук: 05.22.13 защищена 2011, https://www.dissercat.com/content/metody-upravleniya-bespilotnymi-letatelnymi-apparatami-v-obshem-vosdushnom-prostranstve-s. (дата обращения 2021-01-14)
14. Шилов К.Е. Разработка системы автоматического управления беспилотным летательным аппаратом мультироторного типа. Труды МФТИ. 2014. Т. 6. №4. С. 139-152.
15. Купряшкин И.Ф., Лихачев В.П., Рязанцев Л.Б. Малогабаритные многофункциональные РЛС с непрерывным частотно-модулированным излучением. Москва. Радиотехника. 2020. 280 с.
16. Militaryarticle - Военно-научные публикации известных изданий, http://militaryarticle.ru/viniti-ran/2005-viniti/11238-o-vozmozhnostiah-razvedyvatelnyh-bespilotnyh. (дата обращения 2021-01-14)
17. Компания «Техногенезис» дочерняя компания ООО «Лазерные компоненты», https://technogenezis.ru/mini-rls-genezis-rsa. (дата обращения 2021-01-14)
18. Виноградов В. Возможности современных РЛС с синтезированием апертуры антенны / Зарубежное военное обозрение. 2009. №2. С. 52-57. http://militaryarticle.ru/zarubezhnoe-voennoe-obozrenie/2009-zvo/7730-vozmozhnosti-sovremennyh-rls-s-sintezirovaniem.
19. Патент РФ №2429990 от 27.09.2011. Многофункциональная РЛС высокого разрешения с активной фазированной решеткой для пилотируемых и беспилотных летательных аппаратов. Андреев Г.И и др. Заявка №2010134597 от 19.08.2010. Бюлл. 27.
20. Патент РФ №2096804 от 20.11.1977. Радиолокационная система целеуказания. Машков Г.М., Оршлет С.С.и др. Заявка №95122250 от 26.12.1995.
21. Сайт ФГАОУ ВО «МФТИ (НИУ)», https://mipt.ru/education/chair/military/upload/ce2/f_4rmbfl-arph8iq3yu4.pdf (дата обращения 2021-01-14).
22. Патент РФ №2561950 от 10.09.2015. Способ третичной обработки радиолокационной информации в вычислительной системе пункта управления. Савенков Ю.А., Слугин В.Г. и др. Заявка №2014125766 от 10. 2014.06.25.
23. Черняк B.C. Многопозиционная радиолокация. М., Радио и связь. 1993. 416 с.
24. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., Сов. радио. 1974. 432 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора | 2021 |
|
RU2787471C1 |
| Способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов | 2024 |
|
RU2835850C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| Способ радиолокационного обнаружения опасных препятствий при маловысотном полете летательного аппарата | 2016 |
|
RU2645734C1 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
Изобретение относится к методам радиолокационного обнаружения воздушных объектов (ВО), и в частности - к методам обнаружения беспилотных летательных аппаратов (БЛА) с малой радиолокационной заметностью. Задачей изобретения является развитие и совершенствование известного способа обнаружения БЛА, обеспечивающие более высокие характеристики обнаружения в условиях затухания электромагнитных волн в атмосфере при больших дальностях до воздушных объектов. Для решения поставленной задачи предлагается совместно с радиолокационной станцией (РЛС) использовать вспомогательный БЛА обнаружения (БЛАО) с пассивным радиолокатором. Данный БЛАО предлагается заблаговременно запускать в направлении предполагаемого появления представляющих интерес БЛА и синхронизировать угловое направление излучения зондирующих сигналов РЛС с угловым направлением приема отраженных сигналов антенной БЛАО. Необходима радиосвязь БЛАО с основной РЛС для двусторонней передачи информации. Повороты антенны БЛАО происходят по командам системы управления, находящейся на РЛС. В перерывах между управляющими сигналами РЛС с борта БЛАО предлагается передавать сигналы с координатами, обнаруженными ВО в пределах зоны обнаружения РЛС. Отраженные сигналы принимаются также антенной РЛС. Традиционными способами определяются дальность и азимут каждого обнаруженного ВО. Координаты обнаруженных с помощью БЛАО и РЛС воздушных объектов сравниваются. Если координаты ВО, обнаруженных РЛС и БЛАО, совпадают или отличаются не более чем на величину строба отождествления, то принимается решение о том, что это типовой ВО. Если координаты ВО, обнаруженного БЛАО, не совпадают с координатами объектов, обнаруженных РЛС, то принимается решение, что обнаруженный БЛАО ВО является беспилотным летательным аппаратом, то есть летательным аппаратом с малой радиолокационной заметностью. 3 ил.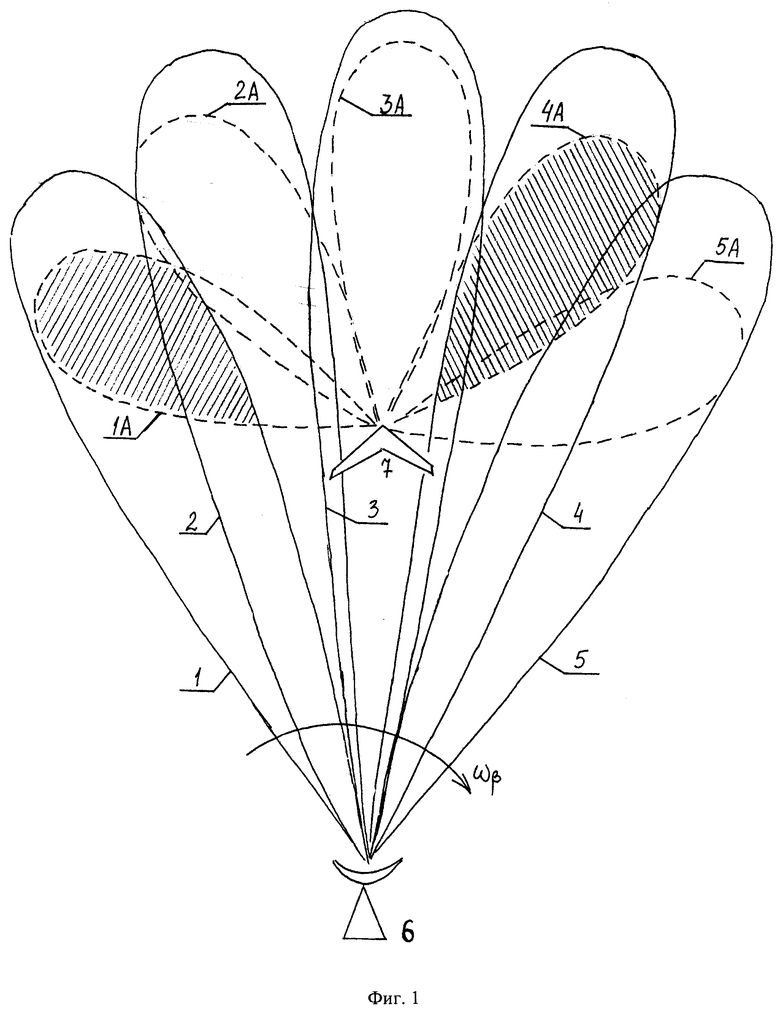
Радиолокационный способ обнаружения беспилотных летательных аппаратов, заключающийся в том, что в активной радиолокационной станции обнаружения снижают по величине период повторения импульсов и скорость вращения антенны по азимуту, в процессе замедленного вращения по азимуту антенны радиолокационной станции обнаружения излучают в пространство с помощью ее антенной системы импульсные зондирующие сигналы, принимают антенной радиолокационной станции обнаружения от каждого импульсного объема отраженные сигналы, проводят фильтрацию этих отраженных сигналов по частоте для выделения отражений от движущихся воздушных объектов на фоне отражений от неподвижных местных предметов, суммируют полученное число отраженных отфильтрованных сигналов для каждого импульсного объема радиолокационной станции обнаружения, сравнивают результат суммирования сигналов в каждом импульсном объеме радиолокационной станции обнаружения с установленным для нее порогом обнаружения и в случае превышения просуммированным сигналом установленного порога на борту активной радиолокационной станции обнаружения принимают решение о том, что в соответствующем импульсном объеме обнаружен движущийся воздушный объект, отличающийся тем, что снижение угловой скорости вращения антенны активной радиолокационной станции обнаружения проводят в азимутальном секторе, биссектриса которого является предполагаемым направлением несанкционированного появления беспилотных летательных аппаратов, причем уменьшение угловой скорости вращения антенны и периода повторения импульсов проводят до достижения предельно малых величин, при которых сохраняется возможность однозначно определять координаты воздушных объектов и осуществлять обзор воздушного пространства за допустимое время, кроме того, заблаговременно запускают в направлении предполагаемого несанкционированного появления представляющих интерес беспилотных летательных аппаратов с малой отражательной способностью вспомогательный беспилотный летательный аппарат обнаружения с пассивным работающим на прием радиолокатором, работающим на той же несущей частоте, что и активная радиолокационная станция обнаружения, оснащая беспилотный летательный аппарат обнаружения либо механически управляемой в азимутальном направлении антенной, либо фазированной антенной решеткой, позволяющей управлять азимутальным направлением основного лепестка ее диаграммы направленности, дальность нахождения беспилотного летательного аппарата обнаружения выбирают на 1-2 км меньшей, чем дальняя граница зоны обнаружения активной радиолокационной станции, то есть чем ее максимальная приборная дальность, на которой предполагается обнаруживать беспилотные летательные аппараты, совершающие несанкционированные полеты, конструктивно предусматривают наличие постоянной устойчивой радиосвязи беспилотного летательного аппарата обнаружения с активной радиолокационной станцией обнаружения, посредством этой радиосвязи с помощью управляющих сигналов активной радиолокационной станции управляют траекторией полета беспилотного летательного аппарата обнаружения, кроме того, с помощью передаваемых от активной радиолокационной станции на борт беспилотного летательного аппарата обнаружения управляющих сигналов синхронизируют угловое направление основного лепестка диаграммы направленности излучающей зондирующие сигналы активной радиолокационной станции с угловым направлением основного лепестка диаграммы направленности принимающей отраженные сигналы антенны беспилотного летательного аппарата обнаружения, в перерывах между управляющими сигналами активной радиолокационной станции с борта беспилотного летательного аппарата обнаружения передают на активную радиолокационную станцию контрольные сигналы о координатах местоположения беспилотного летательного аппарата обнаружения, принимают антенной беспилотного летательного аппарата обнаружения от каждого импульсного объема отраженные сигналы, проводят фильтрацию этих отраженных сигналов по частоте для выделения отражений от движущихся воздушных объектов на фоне отражений от неподвижных местных предметов, суммируют полученное число отраженных отфильтрованных импульсных сигналов для каждого импульсного объема бортового пассивного радиолокатора беспилотного летательного аппарата обнаружения, сравнивают результат суммирования сигналов в каждом импульсном объеме беспилотного летательного аппарата обнаружения с установленным для него порогом П1 обнаружения беспилотных летательных аппаратов с малой отражательной способностью и в случае превышения установленного порога П1 на борту беспилотного летательного аппарата обнаружения принимают решение о том, что в соответствующем импульсном объеме радиолокатора беспилотного летательного аппарата обнаружения обнаружен движущийся воздушный объект, определяют дальностную и азимутальную координаты каждого воздушного объекта, обнаруженного активной радиолокационной станцией обнаружения и беспилотным летательным аппаратом обнаружения, координаты дальности и азимута каждого обнаруженного воздушного объекта передают с борта беспилотного летательного аппарата обнаружения по линии радиосвязи на борт активной радиолокационной станции обнаружения, проводят отождествление воздушных объектов, обнаруженных активной радиолокационной станцией и пассивным радиолокатором беспилотного летательного аппарата обнаружения, путем сравнения координат обнаруженных объектов, по результатам совпадения координат обнаруженных воздушных объектов с точностью до размеров строба отождествления принимают окончательное решение о принадлежности обнаруженного воздушного объекта к беспилотным летательным аппаратам с малой отражательной способностью с использованием правила: если координаты воздушного объекта, обнаруженного беспилотным летательным аппаратом обнаружения, не совпадают с координатами воздушных объектов, обнаруженных активной радиолокационной станцией обнаружения, то этот воздушный объект, обнаруженный беспилотным летательным аппаратом обнаружения, относят к беспилотным летательным аппаратам с малой отражательной способностью.
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| Способ обнаружения малых беспилотных летательных аппаратов | 2020 |
|
RU2735070C1 |
| СПОСОБ ДАЛЬНЕГО ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2721642C1 |
| Способ функционирования радиолокационной системы при измерении скорости полёта беспилотного летательного аппарата малого класса типа мультикоптер и дальности до него | 2018 |
|
RU2697257C1 |
| ФАДЕЕВ Р.С., МЯКИНЬКОВ А.В., БУРОВ В.Н., ОГУРЦОВ А.Г | |||
| Возможности обнаружения и определения координат малозаметных целей в многопозиционных радиолокационных системах с размещением позиций на борту беспилотных | |||

