Изобретение относится к железнодорожной технике и может быть использовано для автоматизированного вождения грузовых поездов повышенной массы и длины, в которых для тяги используется несколько локомотивов, распределенных по длине поезда.
Известна система вождения грузовых поездов повышенной массы, используемая для вождения соединенных поездов, состоящих из обычных вагонов. В известной системе вождения грузовых поездов повышенной массы команды управления формируются техническими средствами, установленными на ведущем электровозе. Эти команды передаются по радиоканалу и принимаются на ведомых электровозах специальными устройствами, которые формируют сигналы, воздействующие на цепи управления, таким образом, что управление с пульта управления машиниста ведущего электровоза приводит к синхронным изменениям в соответствующих цепях ведомых локомотивов. Исполнение команд ведомым локомотивом контролируется на пульте сигнализации ведущего локомотива. Вместе с тем, эта система создает повышенные нагрузки на радиоканал, так как управление ведомыми локомотивами производится только по радио (см. В.Г. Иноземцев, Н.А. Панькин, А.Е. Пыров. Поезда повышенной массы и длины. Технические средства и технология вождения. - М.: Транспорт, 1993, с.80-102).
К недостаткам описанной системы вождения грузовых поездов повышенной массы следует отнести отсутствие возможности автоматизированного управления локомотивами для обеспечения оптимальных режимов движения соединенных поездов, отсутствие возможности управлять удаленными локомотивами по существенно отличному от головного локомотива алгоритму. Кроме того, в этой системе имеет место существенная нагрузка на радиоканал за счет передачи всех команд управления контроллером и тормозами с ведущего локомотива на ведомые.
В качестве прототипа принято устройство вождения поездов повышенной массы и длины с распределенными по их длине локомотивами, содержащее установленные на каждом локомотиве блок центрального процессора с подключенными к нему блоком индикации, блоком памяти, датчиками давления, датчиком скорости и приемопередающим устройством (см. US 5681015 А, В 61 С 17/12, 1997). Это устройство обеспечивает передачу команд управления тормозами по радиосети и электрическим проводам сети управления электропневматическими тормозами состава, состоящего из специализированных грузовых вагонов (в России электропневматические тормоза на грузовых вагонах отсутствуют).
К недостаткам этого устройства, как и описанной выше системы вождения грузовых поездов повышенной массы, следует отнести отсутствие возможности автоматизированного управления локомотивами для обеспечения оптимальных режимов движения соединенных поездов, отсутствие возможности управлять удаленными локомотивами по существенно отличному от головного локомотива алгоритму. Кроме того, в этой системе имеет место существенная нагрузка на радиоканал за счет передачи всех команд управления контроллером и тормозами с ведущего локомотива на ведомые.
Указанные недостатки устраняются в предложенном устройстве благодаря тому, что осуществляется асинхронное (свое для каждого локомотива в составе) автоматическое ведение длинносоставного поезда. При этом в режиме тяги и электрического торможения обеспечивается как синхронная, так и асинхронная работа электрических силовых цепей головного и последующих локомотивов как по режиму ведения, так и в текущем времени и по токовым нагрузкам. При этом реализовывается согласованная работа пневматических тормозов всех локомотивов за счет выполнения общего для всех локомотивов алгоритма торможения и объединения тормозной магистрали поезда.
Технический результат заключается в автоматизации ведения длинносоставного грузового поезда с обеспечением безопасных значений продольных сил в составе, в обеспечении оптимального использования энергоресурсов на движение поезда при выполнении заданным графиком движения времен хода, а также в значительном снижении загрузки радиоканала при передаче команд управления.
Технический результат достигается тем, что в системе автоматизированного вождения грузовых поездов повышенной массы и длины с распределенными по их длине локомотивами, содержащей установленные на каждом локомотиве блок центрального процессора с подключенными к нему блоком индикации, блоком памяти, датчиками давления, датчиком пути и скорости и приемопередающим устройством, на каждом локомотиве дополнительно установлены и подключены к центральному процессору блок автоведения, реализующий на каждом локомотиве собственную программу ведения, датчики тока и напряжения, блок автоматической локомотивной сигнализации, блок диагностики основных узлов и блок формирования сигналов управления исполнительными элементами системы, при этом на головном локомотиве блок центрального процессора подключен к передатчику приемопередающего устройства через блок формирования команд, несущих информацию об обобщенных режимах движения.
На фиг.1 представлена функциональная схема системы автоматизированного вождения грузовых поездов повышенной массы и длины с распределенными по их длине локомотивами.
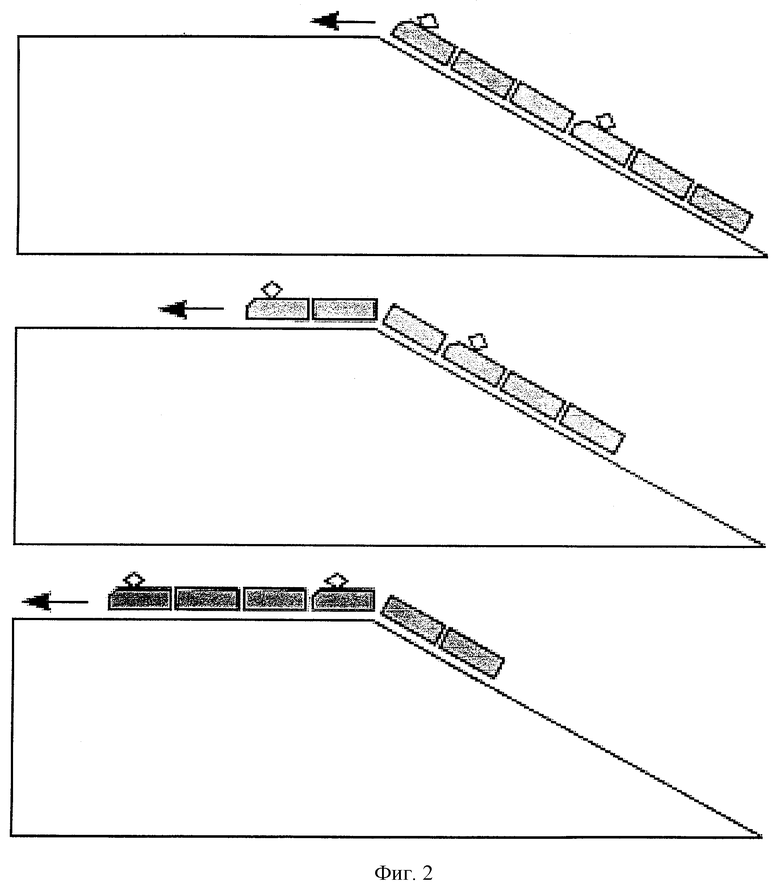
На фиг.2 приведена схема расположения грузового поезда с двумя локомотивами на участке с изменяющимся профилем пути.
Система автоматизированного вождения грузовых поездов повышенной массы и длины с распределенными по их длине локомотивами содержит установленные на каждом локомотиве 1, 2, 3 блок 4 центрального процессора, к которому подключены блок 5 индикации, блок 6 памяти, датчики 7 давления, датчик 8 пути и скорости, блок 9 автоведения, реализующий на каждом локомотиве собственную программу ведения, датчик 10 тока и датчик 11 напряжения, блок 12 автоматической локомотивной сигнализации, блок 13 диагностики основных узлов, блок 14 формирования сигналов управления исполнительными элементами системы, приемопередающее устройство 15, блок 16 клавиатуры; блок 4 центрального процессора головного локомотива подключен к передатчику приемопередающего устройства 15 через блок 17 формирования команд, несущих информацию об обобщенных режимах движения.
Функционально техническое средство, установленное на ведущем локомотиве 1, отличается от аналогичных технических средств, установленных на ведомых локомотивах 2, 3, наличием дополнительно установленного блока 17 формирования команд, несущих информацию об обобщенных режимах движения, через который блок 4 центрального процессора на ведущем локомотиве 1 подключен к передатчику приемопередающего устройства 15. При этом функционирование этих средств на ведущем и ведомых локомотивах осуществляется по различным алгоритмам. Режим работы технических средств (ведущий - локомотив 1 и ведомые - 2, 3) выбирается пользователями (машинистами локомотивов) при запуске системы с помощью блока 16 клавиатуры.
На ведущем локомотиве 1 сигнал от датчика 8 пути и скорости поступает в блок 4 центрального процессора и на основе поступившей информации осуществляет привязку к текущей точке на профиле, используя информацию из бортовой базы данных профиля пути, предварительно записанную в блоке 6 памяти. На основе этих данных блок 9 автоведения формирует обобщенные данные управления для всех локомотивов состава с учетом ограничений скорости, информации, поступающей из блока 12 автоматической локомотивной сигнализации, и информации о расписании, схемы формирования состава и т.д., записанной в блоке 6 памяти, а также данных об изменении условий движения.
Обобщенные задания не являются позицией контроллера, а описывают поведение локомотива (разгон, поддержание скорости и т.п.).
Для ведущего локомотива 1 это задание исполняется блоком 4 центрального процессора, воздействующим на исполнительные элементы локомотива через блок 14 формирования сигналов управления исполнительными элементами системы. Конкретные позиции контроллера ведущего локомотива рассчитываются блоком 4 центрального процессора на основе обобщенного задания по местоположению локомотива и определяемых им по бортовым базам данных профилю и плану пути и составу, текущей скорости и текущим параметрам тягового привода (токи якорей, возбуждения тягового двигателя), напряжения в контактной сети, поступающим от датчиков 10 тока и датчика 11 напряжения.
Информация об обобщенных режимах движения посредством блока 4 центрального процессора поступает на блок 17 формирования команд, несущих информацию об обобщенных режимах движения, и передается передатчиком приемопередающего устройства 15 по радиоканалу на ведомые локомотивы 2, 3.
На ведомых локомотивах 2, 3 приемники приемопередающих устройств 15 воспринимают переданные сигналы, и информация об обобщенных режимах движения поступает на блоки 4 центральных процессоров ведомых локомотивов 2, 3, которые пересчитывают задание в позиции контроллера управления тягой и электрическим торможением в соответствии со своим местоположением на профиле, которое определяется по информации от датчика 8 пути и скорости, бортовой базе данных (из блока 6 памяти) профиля, составу и параметрам локомотива аналогично ведущему локомотиву 1.
Асинхронность управления достигается за счет того, что при расчете конкретных позиций каждый локомотив 1, 2, 3 учитывает как свое положение на профиле и параметры той части состава, которые везет конкретно он, так и непосредственно состояние своего тягового привода, оцениваемое по датчикам 8 пути и скорости, 10 токов и датчику 11 напряжения.
Исключение составляют команды управления пневматическими тормозами, обрабатывающиеся синхронно (или с некоторым заданным временным сдвигом) на всех локомотивах состава.
При выполнении ведомыми локомотивами 2, 3 заданного обобщенного режима ведения их блоки 4 центрального процессора формируют диагностические сообщения для ведущего локомотива 1. Эти сообщения включают в себя позицию контроллера и тормозов и формируются по изменению через минимально допустимое время либо через некоторый максимальный интервал времени. Диагностические сообщения через приемопередающее устройство 15 посылаются ведущему локомотиву 1, где блок 4 центрального процессора определяет по ним состояние радиоканала и ведущих локомотивов.
Таким образом обеспечивается автоведение длинносоставного тяжеловесного поезда с распределенной тягой при условии отсутствия недопустимых продольных динамических усилий в составе, оптимального расхода энергоресурсов и выполнения графика движения. При этом значительно снижается загрузка радиоканала, поскольку по нему передается только информация об обобщенных режимах движения. Данное обстоятельство приводит к снижению вероятности воздействия помех на передаваемую информацию, имеющую ограниченный объем.
Для примера рассмотрим работу устройства при переходе с подъема на площадку в режиме поддержания скорости для поезда из одного ведущего 1 и одного ведомого 2 локомотива. Пусть при езде на подъем для поддержания скорости обоим локомотивам (1 и 2) необходимо ехать на позиции контроллера 27 (соответствует СП соединению электровоза ВЛ10). При переходе ведущего 1 локомотива на площадку сопротивление движению от уклона уменьшится. Это обстоятельство оценивается блоком автоведения по данным бортовой базы данных профиля пути, хранящейся в памяти 6 устройства, и показаниям датчика 8 пути и скорости. По оценке блока автоведения позиция контроллера первого локомотива уменьшается таким образом, чтобы его сила тяги соответствовала скорости стабилизации и новому сопротивлению от уклона. Соответственно позиция контроллера по мере продвижения ведущего локомотива и состава по площадке будет уменьшена до, например, 16 позиции (соответствует С соединению электровоза ВЛ10). По мере того, как и ведомый локомотив и состав будут продвигаться по профилю и перейдут с подъема на площадку, позиция контроллера будет уменьшена и для них.
Кроме того, асинхронность управления нужна даже на постоянном профиле, поскольку, например, для поддержания одной и той же скорости на ведущем и ведомом локомотивах может быть выставлена различная позиция контроллера. Это определяется известным допуском на тяговые характеристики локомотива и различным состоянием тягового привода, следствием чего могут быть различные позиции контроллера для реализации одинаковой силы тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ДЛИНЕ СОСТАВА ЛОКОМОТИВАМИ | 2016 |
|
RU2632039C1 |
| Способ и система автоматизированного вождения грузовых поездов повышенной массы и длины с распределенными по длине состава локомотивами | 2020 |
|
RU2729157C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| Система управления движением поездов, следующих по технологии "виртуальная сцепка" | 2024 |
|
RU2839169C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВОЖДЕНИЯ СОСТАВОВ | 2007 |
|
RU2411147C2 |
| СЕТЕВОЙ МОДУЛЬ СВЯЗИ ПО РАДИОКАНАЛУ (СМРК) ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЕЗДОМ С РАСПРЕДЕЛЕННЫМИ ПО ЕГО ДЛИНЕ ЛОКОМОТИВАМИ | 2004 |
|
RU2252167C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СОЕДИНЕННЫМИ ПОЕЗДАМИ ПО РАДИОКАНАЛУ | 2009 |
|
RU2398729C1 |
| СПОСОБ ВОЖДЕНИЯ СОЕДИНЕННЫХ ПОЕЗДОВ | 2007 |
|
RU2354569C2 |
| Система поддержания интервала разграничения между последовательно движущимися поездами | 2024 |
|
RU2839168C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ЛОКОМОТИВОМ И ПОДТАЛКИВАЮЩИМ ЛОКОМОТИВОМ ПОЕЗДА ПО РАДИОКАНАЛУ | 2015 |
|
RU2578640C1 |
Изобретение относится к железнодорожной технике, в частности, к системам для автоматизированного вождения грузовых поездов повышенной массы и длины, в которых для тяги используется несколько локомотивов, распределенных по длине поезда. Система содержит на каждом локомотиве блоки центрального процессора, индикации и памяти, датчики давления, пути и скорости. Дополнительно на каждом локомотиве установлены блоки автоведения, автоматической локомотивной сигнализации, диагностики основных узлов и формирования сигналов управления исполнительными элементами системы, датчики тока и напряжения. На головном локомотиве блок центрального процессора подключен к передатчику приемопередающего устройства через блок формирования команд, несущих информацию об обобщенных режимах движения. Технический результат заключается в автоматизации ведения состава с обеспечением безопасности, оптимального расхода энергоресурсов и снижения загрузки радиоканала при передаче команд управления. 2 ил.

Система автоматизированного вождения грузовых поездов повышенной массы и длины с распределенными по их длине локомотивами, содержащая установленные на каждом локомотиве блок центрального процессора с подключенными к нему блоком индикации, блоком памяти, датчиками давления, датчиком пути и скорости и приемопередающим устройством, отличающаяся тем, что на каждом локомотиве дополнительно установлены и подключены к центральному процессору блок автоведения, реализующий на каждом локомотиве собственную программу ведения, датчики тока и напряжения, блок автоматической локомотивной сигнализации, блок диагностики основных узлов и блок формирования сигналов управления исполнительными элементами системы, при этом на головном локомотиве блок центрального процессора подключен к передатчику приемопередающего устройства через блок формирования команд, несущих информацию об обобщенных режимах движения.
| US 5681015 А, 28.10.1997 | |||
| ИНОЗЕМЦЕВ В.Г | |||
| и др | |||
| Поезда повышенной массы и длины | |||
| Технические средства и технология вождения | |||
| - М.: Транспорт, 1993, с.80-102 | |||
| Способ изготовления деталей мягкой мебели | 1976 |
|
SU730713A1 |
| DE 4037626 Al, 04.06.1992. | |||

