Изобретение относится к железнодорожной технике и может быть использовано при вождении соединённых грузовых поездов, в которых используется несколько локомотивов, и касается путей выхода из аварийных ситуаций.
Известен способ вождения соединённых грузовых поездов с несколькими локомотивами, распределенными по длине состава, предусматривающий по возможности одновременные действия машинистов с координацией их исполнения по радио с головного локомотива (Инструкция по эксплуатации тормозов подвижного состава железных дорог, ЦТ-ЦВ-ЦЛ-ВНИИЖТ/277.2002, стр 64-74). Ограничения темпа торможения и изменения тяги, предусмотренные способом, позволяют не превышать предельных значений продольных сил в составе. А учет этих сил закладывается в режимы ведения путем использования данных динамометрического вагона при проведении опытных поездок для конкретных участков пути. Кроме радиосвязи, способ предполагает оснащение движущихся локомотивов соединённого поезда сигнализатором разрыва тормозной магистрали с датчиком №418 (В.Г.Иноземцев, Н.А.Панькин, А.Е.Пыров. Поезда повышенной массы и длины. Технические средства и технология вождения. - М. Транспорт, 1993, с.66). Этот прибор, кроме сигнала о нарушении плотности тормозной магистрали, дублирует команду на выключение тяги локомотивов в составе соединённых поездов. При сработке указанной системы машинисты по возможности одновременно обязаны произвести торможение. Применение давления в качестве основного параметра ограничивает использование данного способа.
Известен способ вождения поездов повышенной массы и длины с распределенными по их длине локомотивами, состоящий в автоматизированном управлении локомотивами соединённых составов в режимах синхронной и асинхронной работы электрических цепей управления тяговыми усилиями (пат. RU №2238860, B61C 17/12, от 2003.11.12). При этом способе реализуется согласованная работа пневматических тормозов всех локомотивов за счет выполнения общего для всех локомотивов алгоритма торможения в условиях объединённых тормозных магистралей отдельных составов. Автоматизация ведения длинносоставного грузового поезда с обеспечением безопасных значений продольных сил в составе достигается в основном за счет влияния на тяговые характеристики локомотивов. Способ не предусматривает прямого контроля продольных сил на автосцепках локомотивов. Кроме того, здесь не заложены решения для выхода из аварийных ситуаций, связанных с обрывом тормозной магистрали соединённого поезда.
В качестве прототипа принят способ вождения соединенных грузовых поездов повышенной массы и состоящих из обычных вагонов. С помощью технических средств, установленных на локомотивах, команды управления с головного локомотива передаются по радиоканалу и принимаются на ведомых электровозах соответствующими устройствами, которые формируют сигналы, синхронно воздействующие на тяговые цепи управления ведомых локомотивов. В способе заложен контроль выполненных команд ведущим локомотивом (В.Г.Иноземцев, Н.А.Панькин, А.Е.Пыров. Поезда повышенной массы и длины. Технические средства и технология вождения. - М.: Транспорт, 1993, с.80-102). Управление пневматическими тормозами соединенного поезда осуществляется с ведущего локомотива. Блок хвостового вагона в указанных средствах не применяется, и возможности управления торможением с его помощью не имеется. Прямой контроль продольных сил на локомотивах не используется и аварийные ситуации, связанные с разрывом тормозной магистрали ведомого состава, решаются в соответствии с Инструкцией. При этом не заложено соответствующего алгоритма действий и автоматического управления торможением в аварийных ситуациях.
Технической задачей заявляемого способа является расширение технических возможностей путём создания алгоритма действий и его автоматического использования для минимизации последствий аварийных ситуаций.
Технический результат достигается тем, что в способе автоматизированного вождения соединённых грузовых поездов с распределенными по их длине локомотивами, включающем управление тяговыми и тормозными параметрами с головного локомотива по радиоканалу, согласно изобретению дополнительно контролируют продольные силы на автосцепках локомотивов и в случае их изменения (при разрыве тормозной магистрали) на заданную величину, меньшую максимально допустимой, автоматически подается команда на соответствующее изменение тяги головного локомотива (растяжение) и ведомого локомотива (сжатие), затем проводится разрядка тормозной магистрали ведомым локомотивом темпом экстренного торможения на величину более 0,6 кгс/см2 и на отсоединение ведомого локомотива от вагонов первого поезда при возникновении на его автосцепках растягивающих продольных сил, превышающих указанную заданную величину.
Технический результат достигается в предложенном способе благодаря тому, что осуществляется непрерывный контроль продольных сил на автосцепке локомотивов. Их величина может резко измениться только при обрыве автосцепки в одном из составов соединённого поезда. А скорость распространения продольных сил в несколько раз больше скорости распространения тормозной волны. Поэтому в начале будет проявляться их изменение, а затем и изменение давления. При этом в аварийном режиме при разрыве тормозной магистрали в зависти от того, ведомый или ведущий локомотив первым почувствует изменение продольных сил, команду на сброс тяги подаст ведущий локомотив или ведомый. Блок хвостового вагона с ведущего состава информирует о произошедшем изменении давления ведомый локомотив, тормозная магистраль которого является автономной, и нет её подпитки через кран машиниста ведомого локомотива. Торможение начинается ведомым локомотивом после срабатывания команды на сброс тяги и прихода команды торможения или с ведущего локомотива, или с блока хвостового вагона первого состава, или с блока хвостового вагона второго состава. При этом торможение ведомым локомотивом проводится темпом экстренного торможения.
На чертеже представлена функциональная схема, позволяющая реализовать способ вождения грузовых поездов с распределенными по их длине локомотивами.
Здесь соединенный грузовой поезд повышенной длины с распределенными по их длине локомотивами (показан только ведущий 1 и ведомый или подталкивающий 2) содержит установленные на каждом локомотиве блоки контроля и управления 3, приемопередающее устройство 4 и блоки хвостового вагона 5. Место разрыва тормозной магистрали 6 относится к ведущему составу. На автосцепках 7 локомотивов установлены датчики продольных усилий (не показаны). Датчики давления, пути, скорости и ускорений, имеющиеся на локомотивах и блоках хвостового вагона 5, не показаны.
Команды управления тягой и пневматическими тормозами вырабатываются соответствующим блоком на всех локомотивах состава с учетом имеющихся параметров, в том числе и продольных сил. При этом ведомый локомотив 2 учитывает команды, полученные по радиосвязи с ведущего локомотива 1, и формирует собственные команды для своих исполнительных устройств с учетом величин продольных сил на автосцепках.
Этим обеспечивается ведение составного поезда с распределенной тягой при условии отсутствия недопустимых продольных динамических усилий в составе. Способ реализуется, например, в случае разрыва ведущего состава для поезда из ведущего 1 и ведомого 2 локомотива следующим образом. Ведущий локомотив ведет контроль продольных усилий соответствующим прибором, установленным на автосцепке. Аналогичные устройства установлены на автосцепках ведомого локомотива. При движении возникает разрыв автосцепки на одном из вагонов ведущего состава. Тормозная магистраль при этом сообщается с атмосферой. При разрыве начинают тормозить вагоны по разные стороны от места разрыва, изменяя силу сопротивления движению, действующую на автосцепки локомотивов. Это контролируется датчиками продольных усилий. Если расстояние до головного локомотива меньше, чем до локомотива, установленного в середине состава, то изменения продольных сил будут зафиксированы именно им. Автоматически последует команда на сброс тяги ведущему локомотиву при достижении некоторой заданной величины продольных усилий. Эта граничная величина должна быть меньше, чем некоторая средняя величина продольных сил, приводящая к заведомому разрыву автосцепок. Если первым изменения продольных сил зафиксирует ведомый локомотив, то он самостоятельно сбросит тягу и затем применит торможение ступенью выше чем 0,6 кгс/см2, но темпом экстренного торможения одновременно со своим БХВ. При превышении растягивающих продольных сил на автосцепке ведомого локомотива программируется разъединение соединённого поезда. Это может наблюдаться в случае разрыва ведомого состава и его торможения.
Вследствие того что передача механических напряжений протекает по составу с большей скоростью, возможно выполнение упреждающих действий до возникновения тяжелых последствий такой аварии.
Опыт показывает, что даже использование современной системы ИСАВПРТ не может гарантированно предотвратить разрыв поезда и сход вагонов с рельсов. Поэтому разработанный алгоритм действий на основе контроля продольных усилий может способствовать расширению технических возможностей подобной системы и повышению безопасности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗАМИ СОЕДИНЕННЫХ ПОЕЗДОВ | 2010 |
|
RU2453457C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВОЖДЕНИЯ СОСТАВОВ | 2007 |
|
RU2411147C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| СПОСОБ И СИСТЕМА РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ | 2014 |
|
RU2571000C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ МАГИСТРАЛЬЮ ПОЕЗДА | 2006 |
|
RU2311309C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2012 |
|
RU2496670C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ИСПЫТАНИЯ ТОРМОЗНОГО ОБОРУДОВАНИЯ ВАГОНОВ | 2009 |
|
RU2414366C2 |
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ОДНОЛОКОМОТИВНЫМ ПОЕЗДОМ ПОВЫШЕННОЙ ДЛИНЫ | 2009 |
|
RU2388630C1 |
| Способ автоматизированного вождения соединенных грузовых поездов с одного поста управления | 2020 |
|
RU2735476C1 |
Изобретение относится к железнодорожной технике, может быть использовано при вождении соединенных грузовых поездов и касается путей выхода из аварийных ситуаций. Способ заключается в контроле продольных сил на автосцепках локомотивов, и в случае их изменения на заданную величину, меньшую максимально допустимой, автоматически подается команда на соответствующее изменение тяги головного локомотива и ведомого локомотива. Затем проводится разрядка тормозной магистрали ведомым локомотивом темпом экстренного торможения на величину более 0,6 кгс/см2. При возникновении растягивающих продольных сил, превышающих заданную величину, на автосцепке ведомого локомотива производят его отсоединение от вагонов первого состава. Технический результат заключается в расширении технических возможностей для минимизации последствий аварийных ситуаций. 1 ил.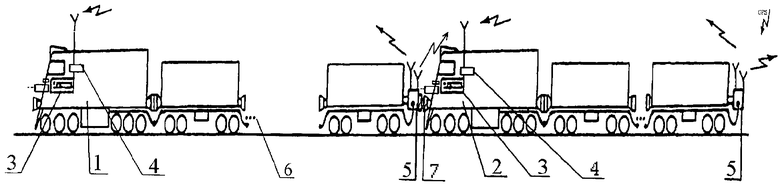
Способ автоматизированного вождения соединенных грузовых поездов с распределенными по их длине локомотивами, включающий управление по радиоканалу тяговыми и тормозными параметрами с головного локомотива, отличающийся тем, что дополнительно контролируют продольные силы на автосцепках локомотивов и в случае их изменения, например при разрыве тормозной магистрали, на заданную величину, меньшую максимально допустимой, автоматически подается команда на соответствующее изменение тяги головного локомотива - при растяжении и ведомого локомотива - при сжатии, затем проводится разрядка тормозной магистрали ведомым локомотивом темпом экстренного торможения на величину более 0,6 кгс/см2 и на отсоединение ведомого локомотива от вагонов первого состава при возникновении на его автосцепках растягивающих продольных сил, превышающих указанную заданную величину.
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |
| СЕТЕВОЙ МОДУЛЬ СВЯЗИ ПО РАДИОКАНАЛУ (СМРК) ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЕЗДОМ С РАСПРЕДЕЛЕННЫМИ ПО ЕГО ДЛИНЕ ЛОКОМОТИВАМИ | 2004 |
|
RU2252167C1 |
| Устройство для управления экстренным торможением соединенных поездов | 1986 |
|
SU1311970A1 |
| US 5950967 A, 14.09.1999. | |||

