I
Изобретение иредназначено для прогнозирования наступления аварийных режимов контролируемых pбъeктoв относите--; к автоматике и вычислительной технике.
По основному авт; св. № 734429 известно устройство для контроля параметров, предназначенное для использования в автоматизированных системах централизованного контроля и обработки информации, содержащее блок коммутации контролируемых объектов, выход которого соединен с первым входом блока-коммутации, второй и третий входы которого подсоединены соответственно к выходам блока реккурентного вычисления параметра и блока весовых коэффициентов, -группы входов которых соединены соответ-. ственно ,с первой и второй группами выходов блока коммутации, третья и четвертая группы выходов которого подсоединены соответственно к rjpynпам входов блока вычисления рассогласования и блока вычисления интеграла вероятностей, выход которого соединен со входами блока регистрации, а группа выходов блока вычисления рассогласования с первой группой входов блока коммутации, первый и второй выходы которого подсоединены соответственно ко входам сумматора и блока управления, выходы которых подключены соответственно к четвер10тому и пятому входам блока коммутации, вторая группа .входов которого подсоединена к первому входу блока внешней памяти и группе выходов блока оперативной памяти, группа
15 входов которого соединена с третьим, четвертым, пятым и шестым выходами блока коммутации, пятая группа выходов которого соединена со вторым, третьим, четвертым, пятым, шестым
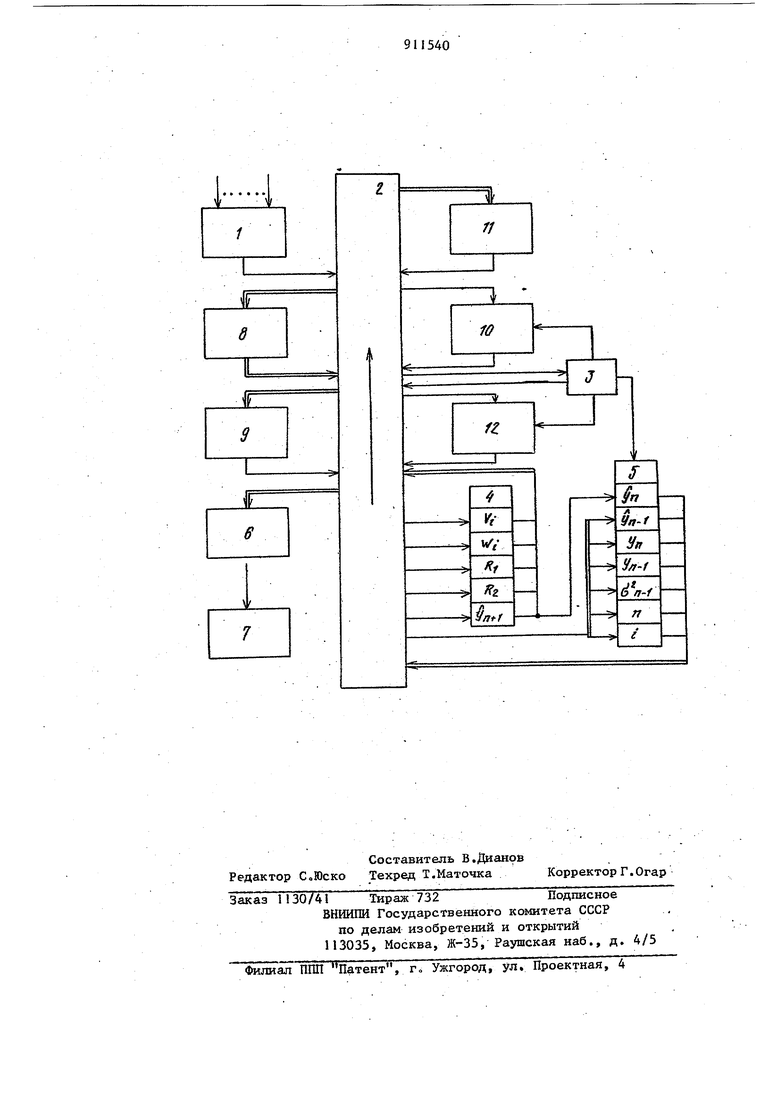
30 и седьмым входами блока внешней па- мяти, а третья группа его входов с группой выходов блока внешней памяти, управляющий вход которого под3/ключей к первому выходу блока управления, второй выход которого соедииен с управляющим входом сумматораНедостатком данного устройства является использование для прогнозирования данных контроля информации, имеющей равную ценность вне зависимости от момента измерения (наблюдения), контролируемой характеристики процесса, т.е. предполагается неизменность модели прогноза, постоянство закона изменения прогнозируемого параметра, выявленного на ретроспективном участке, на определенном времени в будущем. Однако наряду с процессами, определяющие параметры которых детерминированно описываются моделями (поли .номиальными), опирающимися на равную зиачимость всей предыстории процесса, имеется значительный ряд технологических процессов, при прогнозировании параметров которых дисконтирование информации осуществляется путем взвешивания данных контроля, при этом информационные веса измерений убывают по экспоненте по мере удаления времени их получения в прош лое. Использование устройства решения и этой задачи контроля без изменения блок-схемы устройства не представляется возможным, что ограни чивает диапазон его применения. Цель изобретения - расширение фун циональных возможностей устройства за счет унификации структуры модели прогноза. Указанная цель достигается тем, что в устройство для контроля параметров введен управляемый блок умножения, один вход которого подсоедине к выходу блока управления, а другой вход и выход - к соответствующим выходам и входу блока коммутации На чертеже показана блок-схема ус ройства. Устройство содержит блок 1 коммутации контролируе№1х объектов, блок 2 коммутации, блок 3 управления, блок 4 оперативной памяти, блок 5 внешней памяти, блок 6 вычисления интеграла вероятностей, блок 7 регистрации, блок 8 вычисления рассогласования, блок 9 рекуррентного вычисления параметра, сумматор JO, блок 0 .4 11 весовых коэффициентов и управляемый блок 12 умножения. Блок 2 осуществляет функцию соединения меаду блоками устройства, в блоке 4 временно хранятся результаты текущей обработки даншлх контроля, в блоке 5 хранятся данные по результатам предьщущих обработок и необходимые для работы устройства константы. В устройстве блок 8 имеет четыре входа () и два выхода (2 и 2) и реализует следующие соотношения: z..,--x,(x,-X4)()c,-V) Блок У, реализующий рекуррентное вычисление параметра, имеет три входа (Хд-Ху) и один выход (2j) и реаГ-Т Э У/ pji - л fлллч f « л лизует следующее соотношение . Сумматор 10 ( в зависимости от упления) производит суммирование дной величины с константами ±1 и±2, В блоке I1, именщем четыре входа -)) и один выход (Z), реализуя соотношение В блоке 12 (в зависимости от управия производится умножение входвеличины на константу |i . Устройство при экстраполировании ных контроля полиномом f первой пени (degree(f)1), работает слешщм образом. Перед началом работы в блок 5 заятся следующие величины: v,, и-г-° ,. предсказанные значения определяющего параметра в п-ой и (п-1)-ой точках соответственно, дисперсия многомерной случайной функции состояния контролируемого объекта в (п-1)-ой точке Vo,Wo начальные значения весовых коэффициентов V и , используемые для унификации блока 11, i - индекс суммирования для нахоадения значения прогноза определяющего пара метра по формуле: H-A( xK..,-W(V-i..-.;,,,, V -pi M)) N-deoTeeCf)Hi . I... . - V1N4 s M полиномиальный прогнозJ прогноз по методу экспоненциального сглаживания;У1 - количество пред сказ аний Устройство работает следующим образом. Первый цикл работы устройства является предварительным и осуществляется в два такта. В первом такте текущее значение контролируемого параметра % через выход блока 1 коммутации контролируемых объектов, через блок 2 записывается в ячейку памяти блока 5 хранения ; одновременно с этим значнеие И с выхода блока 5 через блок 2 поступает на вход сумматора 10, с выхода которого увеличенное на единицу через блок 2 запи сывается в блок 5 хранения И, Второй такт первого цикла аналогичен предыдущему. Таким образом, результатом работы устройства в пер вом цикле является занесение в соответствующие ячейки блока 5 двух последних значений контролируемого параметра у1 и запоминание вел чины 11 глуби11ы предыстории. В следующем цикле работы, являющемся основным, блок 3 организует работу устройства и восемь тактов. В первом такте содержимое ячеек блока 5, хранящих значения констан {1, N+1 , VQ ) и номера компонента 1 искомого экстраполированного значения 9 y,4. посредством блока 2, поступает на соответствзпощие входы блока 11, в результате чего на его выходе образуется весовой коэффициент , определяемый следующим рекуррентнымсоотношением v.v.,(i-bH±): где W - константа, определяющая по рядок модели прогноза и св занная со степенью экстрап ляционного полинома след ющим образом: N degree(f)t (в нашем частном случае N - номер компонента искомого экстраполированного значения определяющего параметра. Вычисленный козф циент У через блок 2 записывается в соответствующую ячейку блока 4 хранения коэф,фициента Y. Во втором такте, в зависимости от величины разрешакяцего сигнала и , задаваемого из пульта управления блока 3, реализуется одна из двух возможных моделей прогноза. При)0 осуществляется экстраполяция определяющего параметра по полиномиальной модели, при этом содержимое ячеек блока 5, храняпщх значения констант (1, N, WQ), и глубины предыстории Y через блок 2 поступает на соответствующие входы блока II, выходной сигнал которого определяется рекуррентным соотношением ). Через блок 2 сигнал записывается в соответств тощую ячейку блока 4 хранения коэффициента W. ПриУ) фиксируется модель экспоненциального сглаживания, при этом содернсимое ячей ки блока 5, хранящей значение константы {-1) через блок 2 поступает на соответствующий вход блока 12 на величину р 1-01., выход ной сигнал которого W« определяемый рекуррентным соотношением Wx-f5W , через блок 2 1. записывается в соответствующую ячейку блока 4 хранения коэффициента Vv Одновременно с этим значение -) с выхода блока 5 через блок 2 поступает на вход сумматора 10, с выхода которого увеличенное на единицу через блок 2 коммутации записывается в соответствующую ячейку блока 5 хранения 1 - в третьем такте ячейкь блока 5 хранения )у, , ц , V и коммутируются посредством блока 2 со входами блока 8, выходная величина R с которого, определяемая выражением ЧfyгЩ )l записывается в соответствующую ячейку блока 4. Одновременно с этим значение п с выхода блока 5 через блок 2 поступает на вход сумматора 10, с выхода которого уменьшенное на единицу через блок 2 записывается в ячейку блока 5 хранения У1 .
7 . За последующие три такта a IaлorИным образом вычисляется величина
.A-tV
которая также заносится в соответствующую ячейку блока 4, а глубина предыстории увеличивается на 2 едницы (в общем случае - на N единиц)
В седьмом такте величины R и 2 через блок 2 поступают на входы сумматора 10 , на выходе которого формируется экстраполированное значниеч). определяющего параметра, которое заносится в блок 4.
В восьмом такте производится вычисление точности предсказания параMeTpa((jy, ), при этом на вход блока 8 через блок 2 поступают с блока 5 знчения Vy, а также текущее значение контролируемого параметра у, и производится вычисление рассогласования Д ,
)%.
Одновременно с этим в сумматоре 10 производится уменьшение предыстории на 2 единицы. Полученное значение И-2, а также рассогласование Ь и предьщущее значение поступают соответственно с сумматора 10 и с блоков 8 и 5 через блок 3 на соответствующие входы блока 9, в результате чего вычисляется парамет
.%-.(.,
характеризу 01дий точность предсказания параметров в vi-ой точке.
Текущее значение контролируемого параметра v, , вычисленное значение точности прогноза G , а также ранее определенное значение прогноза 9|/141 Р з блок 2 поступают на вход блока 6, в котором производится вычисление вероятности выхода из строя контролируемых объектов; VAon Г (9иц.л-У)1 ,
, fexpL--MTli
(9„,-у)
VM г
.,
вероятность выхода контролируемого параметра из зоны допуска;
допустимое значение определяющего параметра контролируемого объекта,
8
измеренное значение, определяющего параметра в И-ой точке;
предсказанное значнеие определяющего параметра в(.И + 1)-ой
точке; точность (дисперсия) предсказания определянщего г.
pa я WoH точке/т Uj
Результат вычисления фиксируется цифропечатакщим устройдтвом блока 7. Одновременно с этим значение индеке а суммирования /1 с выхода блока 5 через блок 2 поступает на вход сумматора 10, с выхода которого уменьшенное на единицу через блок 2 записывается в блок 5 хранения 1 .
После того, как в ячейки блока 4 хранения начальных значений весов заносятся значения - и -fl для весов V и W соответственно, а в ячейки для храненияV,.VH .V.H i
будут занесены соответственно величины VH , Vvt+--1 , §у , и Vyi4. ус тройство
готово к получению нового экстраполированного значс.иия 2.онтролируемого параметра .
Введение в устройство управляемого блока умножения позволяет расширить функциональные возможности устройства за счет унификации структуры модели прогноза.
Все блоки, составляющие предлагаемое устройство, могут быть реализованы на базе известных элементов и узлов цифроаналоговых вычислительных машин.
Формула изобретения
Устройство для контроля параметров по авт. св. N 754429, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введен управляемый блок умножения, одни вход которого подсоединен к выходу блока управления, а другой вход и выход - к соответствующим выходу и входу блока коммутации.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР К 754429, кл. G 06 F 15/46, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля пара-METPOB | 1978 |
|
SU798870A1 |
| Устройство для контроля параметров | 1978 |
|
SU744614A2 |
| Устройство для контроля параметров | 1977 |
|
SU657440A1 |
| УСТРОЙСТВО для ПРОФИЛАКТИЧЕСКОЙ ДИАГНОСТИКИ | 1973 |
|
SU386399A1 |
| Прогнозирующее вычислительное устройство | 1973 |
|
SU479118A1 |
| Устройство для контроля технических объектов | 1977 |
|
SU734726A1 |
| Дифференцирующе-сглаживающее устройство | 1975 |
|
SU610115A1 |
| Адаптивный экстраполятор | 1989 |
|
SU1652980A1 |
| Устройство для вычисления функций | 1989 |
|
SU1705822A1 |
| Устройство для контроля и резервирования информационно-измерительных систем | 1989 |
|
SU1667280A1 |