Изобретение относится к области измерительной техники и может быть применено в измерительных приборах, имеющих выход в виде вала, и механическое счетное устройство, например счетчиков газа, воды, топлива, требующих корректировки показаний в зависимости от значения погрешности прибора, а также от температурных и иных показателей измеряемых сред.
Известен способ коррекции показаний измерительного прибора с информационным выходом в виде вала и счетным устройством с входным валом, соединенным с валом передаточным механизмом, заключающийся в изменении передаточного отношения между валом измерительного устройства и входным валом индикаторного устройства в зависимости от текущего значения корректирующего показателя (Кремлевский П.П. Расходомеры и счетчики количества. Справочник. - 4-е изд.. перераб. и доп. - Л.: Машиностроение, 1989, гл. 17.10. с.334).
Недостатком данного способа является сложность технической реализации передаточного механизма с изменяемым передаточным отношением, зависящим от корректирующего показателя. Применение вариаторов и иных аналогичных передаточных механизмов с развитой кинематикой приводит к низкой надежности устройства, а также к значительным погрешностям из-за низкой точности установки передаточного отношения в функции значения корректирующего показателя.
Целью изобретения является уменьшение погрешности, повышение надежности и упрощение технической реализации прибора.
Поставленная цель достигается за счет того, что в известном способе коррекции показаний измерительного прибора с информационным выходом в виде вала и счетным устройством с входным валом, соединенным с валом передаточным механизмом, заключающимся в изменении передаточного отношения передаточного механизма, задают два дискретных значения передаточного отношения, фиксированные по величине интервалы угла поворота вала, определяют среднее значение корректирующего показателя в течение предыдущего фиксированного по величине интервала угла поворота вала, на последующем фиксированном по величине интервале угла поворота вала задают первое дискретное значение передаточного отношения, в зависимости от среднего значения корректирующего показателя на предыдущем фиксированном по величине интервале угла поворота вала осуществляют переключение на второе дискретное передаточное отношение при достижении значения угла поворота вала, определяемого средним значением корректирующего показателя и изменяющемся в интервале от нулевого до фиксированного по величине интервала угла поворота вала.
Принципиальным отличием предложенного способа коррекции показаний измерительного прибора от прототипа является коррекция показаний прибора не за счет непрерывного изменения передаточного отношения в зависимости от текущего значения корректирующего показателя, а за счет однократного дискретного изменения передаточного отношения в течение фиксированного по величине интервала угла поворота выходного вала. Это позволяет упростить кинематическую схему, задать два строго определенных значения передаточного отношения, в результате чего уменьшить погрешность измерительного прибора.
В прототипе коррекция показаний измерительного прибора осуществляется механическим вариометром, имеющим низкую точность установки передаточного отношения. Изменение положения ролика вариометра осуществляется силовым датчиком корректирующего показателя (например, сильфоном), что снижает точностные показатели из-за погрешностей установки ролика, определенных разбросом усилия. Изменение геометрических размеров сильфона, а следовательно, и положения ролика, не совпадает с законами коррекции показаний, что приводит к созданию дополнительных механических преобразователей перемещения ролика. приводящих к дополнительным погрешностям. Кроме этого, разветвленная кинематическая часть устройства коррекции подвержена износу, снижающему точностные показатели и межповерочный интервал времени.
От этих недостатков свободен предлагаемый способ коррекции показаний. Это достигается тем, что в кинематической части устройства, реализующего способ, используются передаточный механизм с двумя фиксированными передаточными отношениями и дискретный переключатель передаточного отношения, управляемый вычислительным устройством. Изменение передаточного отношения в зависимости от текущего значения корректирующего показателя заменено на два дискретных изменения передаточного отношения в течение измерительного интервала угла поворота вала, на котором рассчитывается среднее значение корректирующего показателя и по нему определяется момент переключения передаточного отношения передаточного механизма. Введение вычислительного устройства позволяет реализовывать различные функциональные и эмпирические зависимости коррекции показаний от корректирующего показателя.
Рассмотрим реализацию данного способа коррекции показаний измерительного прибора с информационным выходом в виде вращающегося вала на основе счетчика газа с температурной коррекцией.
В течение одного оборота вала при нормальной температуре, равной 20° С, через счетчик проходит циклический объем газа Vц, равный

где V0 - циклический объем идеального счетчика,
Δ V - абсолютная погрешность счетчика, приведенная к циклическому объему. Задается фиксированный по величине интервал угла поворота вала счетчика, определяемый количеством полных оборотов вала, равных значению N0. За этот интервал через счетчик проходит измерительный объем газа, равный

При наличии передаточного механизма между валом измерительного прибора и входным валом счетного устройства с передаточным отношением i индицируемый счетным устройством объем газа равен значению

Если интервал N0 разбить на два интервала N1 и N2=N0-N1, задав на каждом из них передаточные отношения i1 и i2 соответственно, то индицируемый объем станет равным

или, выделив погрешность, значению

где V0·N1/i1+V0·(N0-N1)/i2 - индицируемый объем идеального счетчика,
±(Δ V· N1/i1+Δ V· (N0-N1)/i2) - составляющая погрешности в индицируемом объеме газа.
Таким образом, изменяя значение Ni в пределах от 0 до N0 можно изменять значение индицируемого объема в пределах
от 
до 
обеспечивая коррекцию показаний прибора выбором необходимого значения N1.
Коррекция показаний прибора с нулевой погрешностью в зависимости от корректирующего показателя (в рассматриваемом случае счетчика газа от температуры) осуществляется следующим образом. Задается диапазон изменения температуры и определяются поправочные коэффициенты при максимальной и минимальной температуре, учитывающие теплового расширения газа.
Так при диапазоне температур от -40 до +80° С в соответствии с ГОСТ Р 50818 - 95 (стр. 13) поправочный коэффициент, учитывающий тепловое расширение газа, определяется выражением

где Тк - текущая температура газа,
Тисп - температура, соответствующая нормальным условиям (20° С).
При Т=+80° С knmax=1.2047, а при Т=-40° С knmin=0.7952.
Соответственно, коэффициенты, корректирующие передаточные отношения при максимальной и минимальной температуре, определяются следующим образом:
kmax=knmax=1.2047, kmin=knmin=0.7952.
Исходя из сущности способа, индицируемый объем газа определяется на двух интервалах как

Передаточные отношения i1 и i2 определяются из условия задания в крайних точках температурного диапазона значений N1, равных 0 и N0. Коррекция индицируемого объема к нормальной температуре, в соответствии с выражением (3), определяется соотношениями

где i1=i· kmax, i2=i· kmin.
В случае промежуточного значения температуры, а следовательно, и промежуточного значения передаточного отношения iпр, коэффициент, корректирующий передаточное отношение, равен kпp, а индицируемый объем газа для идеального измерительного прибора равен значению

которое также равно значению индицируемого объема газа, полученное в соответствии с выражением (9), то есть

Данное соотношение определяет значение интервала N1, необходимого для коррекции индицируемого объема газа при промежуточной температуре, вычисляемое как

Изменение значения N1 решает не только задачу коррекции показаний в зависимости от корректирующего показателя, но и задачу коррекции погрешности измерительного прибора. выполняемую при поверке.
Для того чтобы значение индицируемого объема соответствовало показаниям идеального прибора Vин=V0·N0/iпр, необходимо скорректировать значение N1 таким образом, чтобы выполнялось следующее соотношение:

где N11 - скорректированное значение N1.
После ряда преобразований получим:

где δ =Δ V/V0 - относительная погрешность измерительного прибора.
То есть для коррекции погрешности прибора достаточно изменить значение N1 на величину, равную

Так как процесс коррекции показаний происходит в течение измерительного интервала, то значение коэффициента, корректирующего передаточное отношение kпр, является не мгновенным. а средним за измерительный интервал. В связи с этим среднее значение коэффициента knp определяется на предыдущем измерительном интервале, а используется для коррекции в последующем. То есть процесс коррекции отсрочен на один измерительный интервал и, следовательно, значение индицированного и откорректированного объема газа на j+1 интервале определиться выражением

Кроме этого, особенностью данного способа коррекции является то, что показания измерительного прибора соответствуют действительному значению только в конце измерительного интервала. В течение интервалов N1 и N2=N0-N1, показания опережают или отстают от действительных значений в зависимости от соотношений передаточных отношений. Поэтому данный способ предпочтительно использовать в системах учета, задавая величину измерительного интервала равной минимальной единице учета (оплаты) потребляемого ресурса.
Данный способ коррекции может быть использован в счетчиках жидкости с большим температурным расширением, в счетчиках газа с коррекцией объема по температуре и давлению, в расходомерах воды с коррекцией по температуре и давлению (теплосчетчиках). Для этого необходимо в каждом из случаев применения способа рассчитать зависимости N1 от корректирующих параметров. Причем эти зависимости могут носить как аналитический характер, так могут быть заданы в табличном виде в эмпирических случаях.
Известно устройство коррекции показаний измерительного прибора с информационным выходом в виде вала и счетным устройством с входным валом, соединенным с валом передаточным механизмом, выполненным в виде планетарной передачи, состоящей из фрикционного диска, соединенного с валом; рычага, соединенного с концом входного вала: ролика, расположенного на рычаге с возможностью перемещения вдоль рычага, внешней поверхностью соприкасающегося с фрикционным валом; сильфона, расположенного вдоль рычага, одной стороной соединенного с входным валом, другой - с вилкой, охватывающей ролик (Кремлевский П.П. Расходомеры и счетчики количества. Справочник. - 4-е изд., перераб. и доп. -Л.: Машиностроение. 1989, гл. 17.10., с.334).
Недостатками устройства являются низкие точностные показатели, обусловленные сложной кинематикой, зависимостью от ее износа, невозможностью формирования функциональных зависимостей показаний счетного устройства от корректирующего показателя.
Целью изобретения является повышение точностных показателей за счет упрощения кинематики устройства, расширение функциональных возможностей за счет формирования функциональных зависимостей показаний счетного устройства от корректирующего показателя.
Предложенный способ осуществляется с помощью устройства коррекции показаний измерительного прибора, представленного на фиг.1 и фиг.2.
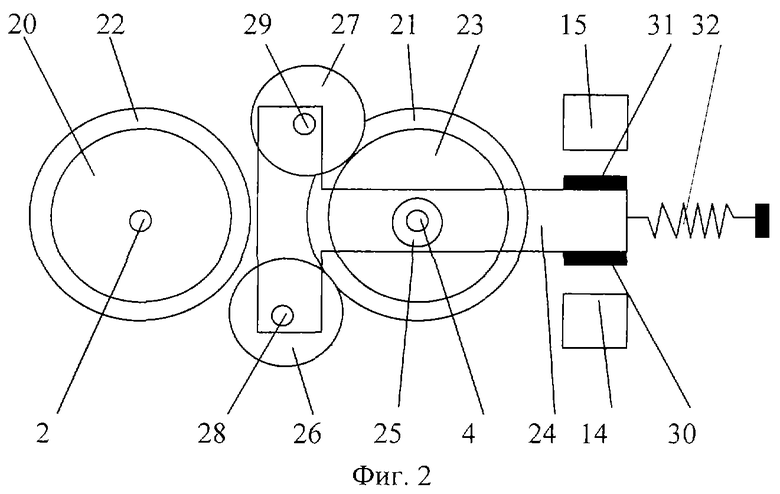
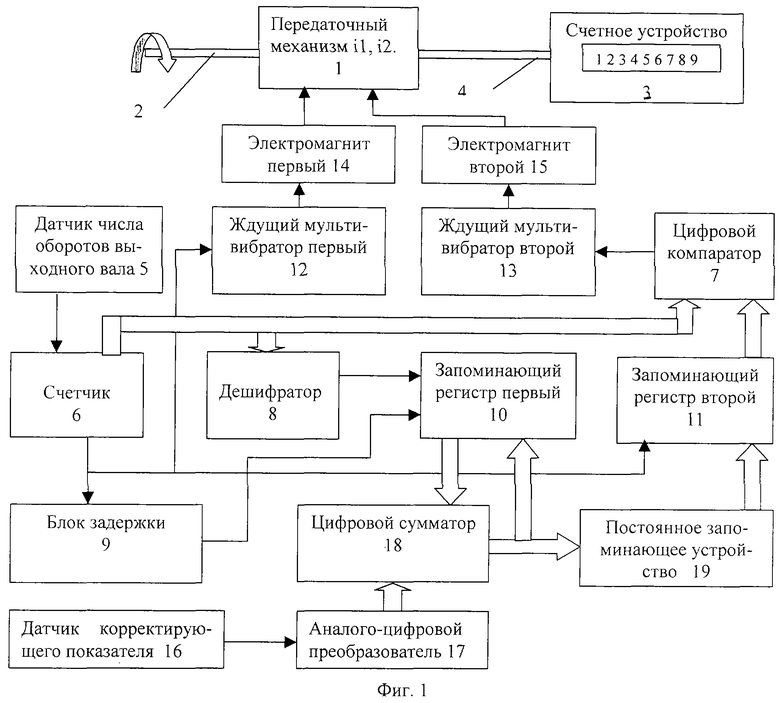
На фиг.1 представлена структурная схема устройства коррекции показаний измерительного прибора, а на фиг.2 - его кинематическая часть.
Устройство (фиг.1) состоит из механической части, содержащей передаточный механизм 1; вал 2 измерительного прибора; счетное устройство 3, входной вал 4 которого соединен с выходом передаточного механизма 1; и вычислительной части, содержащей датчик 5 числа оборотов вала 2 (например геркон с установленным на валу 2 магнитом); счетчик 6 со счетным входом, цифровыми выходами и выходом переполнения (например 555ИЕ6); цифровой компаратор 7 с первым и вторым цифровыми входами и выходом равенства кодов (например 555СП1); дешифратор 8 с цифровыми входами; блок задержки 9 (например в виде интегрирующей RC цепочки); первый запоминающий регистр 10 со входами записи, сброса, входами и выходами данных; второй запоминающий регистр 11 с входом записи, входами и выходами данных (например 555ИР23); первый и второй ждущие мультивибраторы 12. 13 (например 555ТЛ1); первый и второй электромагниты 14, 15; датчик 16 корректирующего показателя (например датчик температуры 1019ЕМ1); аналого-цифровой преобразователь 17 с аналоговым входом и цифровыми выходами (например 572 ПИ1); цифровой сумматор 18 с первыми и вторыми цифровыми входами и цифровыми выходами (например 555ИМ3); постоянное запоминающее устройство 19 с адресными входами и выходами данных (например 27С512).
Выход датчика 5 числа оборотов вала соединен со счетным входом счетчика 6, цифровые выходы которого соединены с первыми цифровыми входами цифрового компаратора 7 и цифровыми входами дешифратора 8, а выход переполнения - со входом сброса запоминающего регистра 10 через блок задержки 9, входом электромагнита первого 14 через ждущий мультивибратор 12 и входом записи запоминающего регистра второго 11. Выход датчика 16 корректирующего показателя соединен с аналоговым входом аналого-цифрового преобразователя 17, цифровые выходы которого соединены с первыми цифровыми входами цифрового сумматора 18. Адресные входы постоянного запоминающего устройства 19 соединены с цифровыми выходами цифрового сумматора 18 и входами данных запоминающего регистра первого 10, выходы данных которого соединены со вторыми цифровыми входами цифрового сумматора 18. Входы данных запоминающего регистра второго 11 соединены с выходами данных постоянного запоминающего устройства 19, а выходы данных - со вторыми цифровыми входами цифрового компаратора 7, выход равенства кодов которого соединен со входом электромагнита второго 15 через ждущий мультивибратор второй 13.
Кинематическая схема передаточного механизма 1 представлена на фиг.2 и содержит ведущую и ведомую шестерни 20 и 21, образующие первую цилиндрическую передачу, установленные на валу 2 и входном валу 4 соответственно, ведущую и ведомую шестерни 22, 23, образующие вторую цилиндрическую передачу, также установленные на валу 2 и входном валу 4 соответственно, Т-образную балку 24, установленную на входном валу 4 при помощи опоры вращения 25, паразитные шестерни 26, 27 первой и второй цилиндрических передач, соответственно располагающиеся на осях 28, 29, установленных на поперечной части Т-образной балки 24 таким образом, чтобы паразитные шестерни 26, 27 находились в зацеплении с ведомыми шестернями 21, 23 соответственно, якори 30, 31, соединенные с боковыми поверхностями конца продольной части Т-образной балки 24, электромагниты 14, 15 соответственно, установленные на корпусе передаточного механизма 1 напротив якорей 30, 31, цилиндрическую пружину 32, один конец которой соединен с центром торцевой поверхности продольной части Т-образной балки 24, а второй - с корпусом передаточного механизма 1.
Устройство (фиг.1) работает следующим образом.
Счетчик 6 числа оборотов вала 2 имеет емкость N0, чем определяет измерительный интервал. Импульсы с выхода датчика 5 числа оборотов вала подсчитываются счетчиком 6. Измерительный интервал начинается с момента переполнения счетчика 6. При этом сигнал с выхода переполнения счетчика 6, поступая на вход записи запоминающего регистра второго 11, запоминает данные, поступающие с выходов данных постоянного запоминающего устройства 19. Одновременно этот же сигнал с задержкой, определяемой блоком задержки 9. обнуляет данные, хранимые в запоминающем регистре первом 10, а также, приходя на вход ждущего мультивибратора 12, формирует на его выходе импульс, включающий электромагнит первый 14.
Срабатывание электромагнита первого 14 (фиг.2) приводит к притягиванию якоря 30 к электромагниту 14, при этом Т-образная балка 24 поворачивается на входном валу 4, приводя к сцеплению ведущую и ведомую шестерни 20, 21 с помощью паразитной шестерни 26. Данный процесс включает первую цилиндрическую передачу с коэффициентом передачи i1.
В течение измерительного интервала N0, с целью определения среднего значения, производится Z измерений корректирующего показателя, для чего служит дешифратор 8, выделяющий каждое N0/Z значение измерительного интервала. Значение Z, в зависимости от частотных свойств корректирующего показателя измеряемой среды, может меняться в пределах от 1 до N0. При этом для уменьшения методической погрешности необходимо, чтобы отношение N0/Z было целочисленным.
Выходное напряжение датчика 16 корректирующего показателя, например температуры, поступает на аналоговый вход аналого-цифрового преобразователя 17 и преобразуется в цифровой код, который с его цифровых выходов поступает на первые цифровые входы цифрового сумматора 18, где суммируется с выходными данными запоминающего регистра первого 10, поступающими на вторые цифровые входы. Таким образом на цифровых выходах цифрового сумматора 18 образуется код суммы значений кодов аналого-цифрового преобразователя 17 и запоминающего регистра первого 10. Так как на вход записи запоминающего регистра первого 10 через каждое N0/Z значение измерительного интервала поступает сигнал записи, то на цифровых выходах цифрового сумматора 18 образуется код суммы значений кодов аналого-цифрового преобразователя 17. Этот код, соответствующий количеству измерений Z, пропорционален среднему значению корректирующего показателя на интервале N0.
В постоянное запоминающее устройство заносится таблица значений N1+Δ N, рассчитанных в соответствии с выражением 13 или аналогичных выражению 13 для случаев иного корректирующего показателя. В случаях, когда зависимость от корректирующего показателя носит эмпирический характер, то в постоянном запоминающем устройстве располагают соответствующую таблицу. При этом адресные входы постоянного запоминающего устройства являются входами среднего значения корректирующего показателя, представленного в виде кода суммы измеренных значений, а выходы данных - выходами кода соответствующих значений N1+Δ N. По окончании текущего измерительного интервала сигналом с выхода переполнения счетчика 6 код значения N1+Δ N переписывается в запоминающий регистр второй 11, где сохраняется до окончания следующего измерительного интервала. Этот же сигнал. задержанный блоком задержки 9, обнуляет запоминающий регистр 10, подготавливая устройство к расчету среднего значения корректирующего показателя на следующем измерительном интервале.
В процессе отсчета измерительного интервала N0 производится непрерывное сравнение текущего значения кода с выхода счетчика 6 с кодом значения N1+Δ N с выхода запоминающего регистра второго 11 с помощью цифрового компаратора 7. В момент сравнения кодов сигнал с выхода равенства кодов цифрового компаратора 7 поступает на вход ждущего мультивибратора второго 13, короткий импульс с выхода которого включает электромагнит второй 15.
Срабатывание электромагнита второго 15 (фиг.2) приводит к притягиванию якоря 31 к электромагниту, при этом Т-образная балка 24 поворачивается на входном валу 4, приводя к сцеплению ведущую и ведомую шестерни 22, 23 с помощью паразитной шестерни 27. Данный процесс включает вторую цилиндрическую передачу с коэффициентом передачи i2.
Таким образом на измерительном интервале N0 задаются два интервала N1+Δ N и N2=N0-(N1+Δ N) с передаточными отношениями передаточного механизма i1 и i2 соответственно, приводящие к необходимой коррекции показаний.
С целью снижения потребления энергии электромагнитами 14, 15 введена пружина 32, удерживающая Т-образную балку в крайних положениях после срабатывания электромагнитов 14, 15.
Предложенный способ осуществляется с помощью второго устройства коррекции показаний измерительного прибора (вариант 2), представленного на чертежах фиг.3-5.
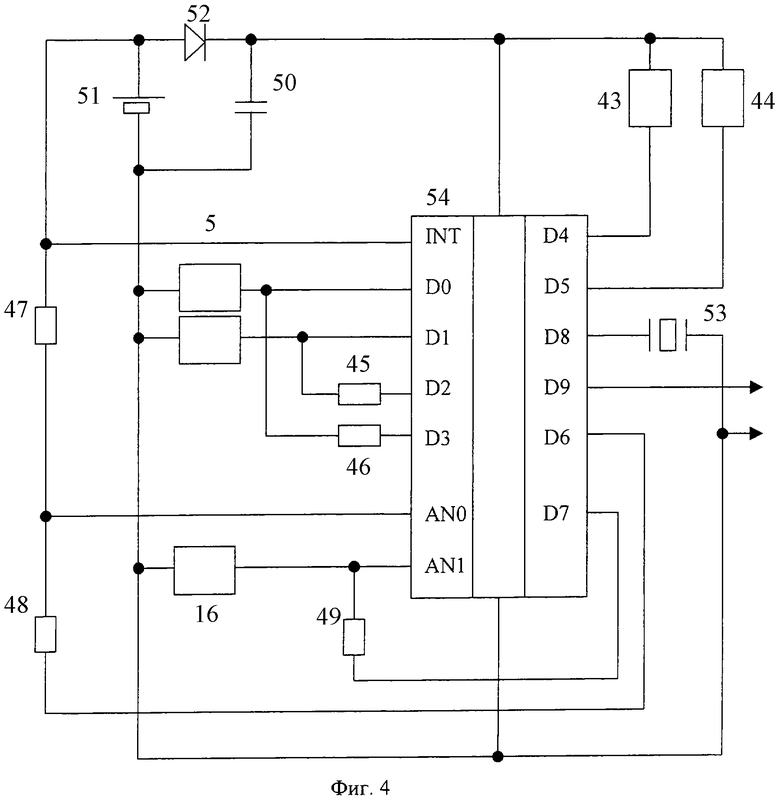
На фиг.3 представлена кинематическая часть, на фиг.4 - структурная схема устройства коррекции показаний измерительного прибора, а на фиг.5 - блок схема алгоритма программного обеспечения микропроцессора.
Кинематическая схема устройства (фиг.3) состоит из механической части, содержащей передаточный механизм, состоящий из вала 2, на котором расположены две втулки 33, 34. Первая втулка 33 соединена с валом 2 с возможностью перемещения вдоль вала 2, а вторая втулка 34 расположена на валу с возможностью свободного вращения. На первых боковых, примыкающих друг к другу, поверхностях втулок 33, 34 нанесены фрикционные покрытия 35, 36. На валу 2, со стороны вторых боковых поверхностей втулок 33, 34 установлены стопорные кольца 37, 38, а на внешней поверхности первой втулки 33 установлен кольцевой магнит 33, соединенный со втулкой 33 по поверхности внутреннего диаметра кольца кольцевого магнита 39. Кольцевой магнит 39 расположен с возможностью перемещения внутри цилиндрического каркаса 40, боковые поверхности которого соединены с двумя магнитопроводящими шайбами 41, 42 внешний диаметр которых совпадает с наружным диаметром цилиндрического каркаса 40, а внутренний диаметр меньше внешнего диаметра кольцевого магнита 39. На цилиндрическом каркасе 40 расположены две обмотки 43, 44. Вторая втулка 34 является входным валом счетного устройства.
Электрическая схема устройства (фиг.4.) содержит два датчика 5 числа оборотов вала, датчик 16 корректирующего показателя, две обмотки 43, 44, пять резисторов 45-49, конденсатор 50, батарею питания 51, диод 52 звуковой излучатель 53, микропроцессор 54 с двумя входами аналого-цифрового преобразователя, десятью входами ввода-вывода дискретной информации и входом внешнего прерывания. Первые выводы первого и второго датчиков 5 числа оборотов вала соединены с нулевым и первым входами ввода-вывода дискретной информации микропроцессора 54. Нулевой и первый входы ввода-вывода дискретной информации микропроцессора 54 соединены через первый и второй резисторы 46 с третьим и вторым входами ввода-вывода дискретной информации микропроцессора 54. Анод диода 52 соединен с положительным выводом батареи питания 51, входом внешнего прерывания микропроцессора 54 и первым выводом третьего резистора 47, второй вывод которого соединен с нулевым входом аналого-цифрового преобразователя микропроцессора 54 и, через четвертый резистор 48, с шестым входом ввода-вывода дискретной информации микропроцессора 54. Катод диода 52 соединен с первым выводом конденсатора 50, с выводом питания микропроцессорами 54 и двумя первыми выводами обмоток 43, 44, вторые выводы которых соединены с четвертым и пятым входами ввода-вывода дискретной информации микропроцессора 54. Первый вывод датчика 16 корректирующего показателя соединен с первым входом аналого-цифрового преобразователя микропроцессора 54 и, через пятый резистор 49, с седьмым входом ввода-вывода дискретной информации микропроцессора 54. Восьмой вход ввода-вывода дискретной информации микропроцессора 54 соединен с первым выводом звукового излучателя 53. Вторые выводы датчиков 5 числа оборотов вала, датчика 16 корректирующего показателя, батареи питания 51, конденсатора 50, звукового излучателя 53, питания микропроцессора 54 соединены между собой. Девятый вход ввода-вывода дискретной информации микропроцессора 54 является входом последовательного коммуникационного интерфейса.
В данном устройстве, с целью упрощения технической реализации, значение i1, при котором входной вал вращается с наименьшей скоростью, принято равным бесконечности. Таким образом, на интервале N0-N1 счетный механизм оказывается подключенным к валу измерительного прибора, а на интервале 0-N1 - отключенным.
При этом выражение (10) примет вид:

Данное соотношение определяет значение интервала N1, необходимого для коррекции индицируемого объема газа при промежуточной температуре, вычисляемое как:

Для того, чтобы значение индицируемого объема соответствовало показаниям идеального прибора Vин=V0·N0·i, необходимо скорректировать значение N1 таким образом, чтобы выполнялось следующее соотношение:

где: N11 - скорректированное значение N1,
i2 - коэффициент передачи передаточного механизма,
± Δ V· N1i2 составляющая погрешности в индицируемом объеме газа.
После преобразований получим:

где δ =Δ V/V0 - относительная погрешность измерительного прибора.
То есть для коррекции погрешности прибора достаточно изменить значение N1 на величину, равную

Коррекция показаний прибора с нулевой погрешностью в зависимости от корректирующего показателя (в рассматриваемом случае для счетчика газа от температуры) осуществляется следующим образом. Задается минимальная температура, которая принимается в качестве базовой Тб. В этом случае для базовой температуры поправочный коэффициент

равен единице. Для более высоких температур поправочный коэффициент, учитывающий тепловое расширение газа, определяется выражением

где Тк - текущая температура газа.
При Т=+80° С kпp=1.515.
В соответствии с выражением (17) коррекция индицируемого объема при максимальной температуре определяется соотношением:

или с учетом коррекции погрешности прибора

В случае промежуточного значения температуры определяется соответствующий корректирующий коэффициент kпр, для которого рассчитываются соответствующие значения N11.
Так как процесс коррекции показаний происходит в течение измерительного интервала, то значение корректирующего коэффициента kпр, является не мгновенным, а средним за измерительный интервал, в течение которого на интервале 0-N1 входной вал счетного устройства соединен с валом измерительного прибора через передаточный механизм и вращается, а на интервале N1-N0 отсоединен и, соответственно, не вращается. В связи с этим среднее значение коэффициента kпр определяется на предыдущем измерительном интервале, а используется для коррекции в последующем. То есть процесс коррекции отсрочен на один измерительный интервал и, следовательно, значение индицированного и откорректированного объема газа на j+1 интервале определиться выражением

Кинематическая схема передаточного механизма представлена на фиг.3 и работает следующим образом. Обмотки 43, 44 при включении создают поля внутри каркаса 40, направленные навстречу друг другу. Эти поля взаимодействуют с кольцевым магнитом 39, намагниченным в поперечном направлении, причем при включении обмотки 43 кольцевой магнит 39 притягивается к магнитопроводящей шайбе 42, а при включении обмотки 44 - к магнитопроводящей шайбе 41. Для исключения трения кольцевого магнита 39 о магнитопроводящую шайбу 41 на валу 2 установлено стопорное кольцо 37, создающее зазор между кольцом 39 и шайбой 41. При этом в соответствующем направлении перемещается втулка 33. Включение обмотки 44 приводит к сцеплению втулки 33 со втулкой 34 посредством фрикционных покрытий 35, 36 и передачи вращения от вала 2 к втулке 34. При отключении обмотки 43 втулка 33 остается в том же положении за счет притяжения кольцевого магнита 39 к магнитопроводящей шайбе 42. В случае включения обмотки 44 перемещение магнита 39 со втулкой 33 в направлении магнитопроводящей шайбы 41 приводит к размыканию кинематической цепи втулка 33 - втулка 34 и прекращению передачи вращения на втулку 34 от вала 2. При отключении обмотки 44 втулка 33 удерживается в том же положении за счет притяжения кольцевого магнита 39 к магнитопроводящей шайбе 41.
Устройство (фиг.3, 4) работает следующим образом. Два датчика 5 числа оборотов вала (например герконы) установлены таким образом, чтобы срабатывали поочередно по мере вращения вала 1. Микропроцессор 54 осуществляет непрерывный опрос первого датчика 5, контролируя его выходное напряжение, подаваемое с вывода D3 микропроцессора через резистор 46. При срабатывании первого датчика 5 напряжение на входе D0 становиться равным нулю и микропроцессор отключает первый дптчик 5, снимая уровень 1 с вывода D3, и включает второй датчик 5 через резистор 45, подавая уровень 1 на вывод D2. После этого начинается непрерывный опрос первого датчика 5. При срабатывании второго датчика 5 последний отключается и вновь включается первый датчик 5. Одновременно с этим увеличивается на 1 счетчмк измерительного интервала N0.
Такое построение датчиков 5 оборотов вала 2 исключает помехи от дребезга контактов датчиков и значительно уменьшает расход электроэнергии батареи питания 51 при срабатывании датчиков.
Текущее значение счетчика N0 сравнивается со значением N11. рассчитанным на предыдущем измерительном интервале. При сравнении текущего значения N счетчика N0 со значением N11 на вход ввода-вывода D5 подается кратковременный импульс в виде нулевого состояния вывода D5. Это приводит к включению обмотки 44, размыканию кинематической цепи вал 2- втулка 34 и прекращению работы счетного устройства. После этого, а также при отсутствии равенства значения N счетчика N0 значению N11, производится проверка кратности N значению Z. определяющему величину измерительного интервала корректирующего показателя N0/Z. В случае выполнения условия кратности включается датчик корректирующего показателя (например, полупроводниковый датчик температуры) путем установки на входе ввода-вывода D7 микропроцессора 54 сигнала 1. Значение выходного напряжения датчика 16 измеряется и преобразуется в цифровой код, на величину которого увеличивается значение счетчика среднего значения корректирующего показателя, после чего осуществляется проверка равенства значения N счетчика N0 значению N0. В случае возникновения равенства на вход ввода-вывода D4 подается кратковременный импульс в виде нулевого состояния входа ввода-вывода D4. Это приводит к включению обмотки 43, замыканию кинематической цепи вал 2 - втулка 34 и включению счетного устройства, после чего рассчитывается значение N11 в соответствии с выражением 19. Рассчитанное значение N11 запоминается, счетчики измерительного интервала N0 и среднего значения корректирующего показателя обнуляются, после чего, а также при невыполнении условий кратности значений N значению Z и неравенстве N значению N0, микропроцессор переходит в режим проверки величины питающего напряжения.
Для этого на входе ввода-вывода D6 устанавливается уровень нуля, что приводит к подключению делителя напряжения на резисторах 47, 48 ко входу аналого-цифрового преобразователя AN1. Напряжение батареи питания 51 измеряется и сравнивается с опорным напряжением U1. В случае снижения напряжения ниже уровня U1 на вход ввода-вывода D7 микропроцессора выдается пачка импульсов звуковой частоты, поступающая на звуковой излучатель 53, который сигнализирует о необходимости замены батареи питания 51. При дальнейшем снижении напряжения ниже уровня U2 микропроцессор 54 выдает импульс на вход ввода-вывода D5, который, с помощью обмотки 44, соединяет втулки 33, 34 между собой и переводит измерительный прибор в режим измерения, соответствующий наибольшей частоте вращения вала 1 (этот режим соответствует в счетчике газа минимальной температуре, в теплосчетчике - максимальной температуре теплоносителя). При этом микропроцессор 54 отключается путем перевода его в режим сна.
Если напряжение в норме, то проверяется уровень напряжения на коммуникационном входе ввода-вывода D9. Если уровень соответствует единице, то микропроцессор переходит в режим приема информации от внешнего устройства (например, персональной ЭВМ) с целью загрузки значения относительной погрешности измерительного прибора, полученного при поверке прибора.
В случае отключения батареи питания 51 возникает внешнее прерывание по входу INT микропроцессора 54. При этом микропроцессор выдает короткий импульс на обмотку 44, соединяя втулки 33, 34, и переходит в режим сна.
Этот же процесс происходит при попытке отключения устройства коррекции путем закорачивания батареи питания 51. B этом случае обмотка питается за счет энергии, накопленной в конденсаторе 50, а диод 52 предохраняет конденсатор 50 от разряда через внешнюю закоротку.
Таким образом, данное устройство коррекции выполняет не только функции коррекции показаний измерительного прибора в зависимости от значения корректирующего показателя и погрешности, но и выполняет контроль величины питающего напряжения батареи питания, а также сохраняет работоспособность измерительного прибора при отключении батареи питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ АНАЛОГ-КОД С ИНДУКТИВНЫМ ДАТЧИКОМ | 1992 |
|
RU2065665C1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| СПОСОБ ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ УГЛА | 2012 |
|
RU2488958C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ЭЛЕКТРОЭНЕРГИИ С ПРЕОБРАЗОВАТЕЛЕМ СИГМА-ДЕЛЬТА С ПЕРЕМЕННЫМ КОЭФФИЦИЕНТОМ УСИЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2117303C1 |
| Способ определения удоя молока и устройство для его осуществления | 1988 |
|
SU1731107A1 |
| СИСТЕМА ДИАГНОСТИКИ ЗАБОЛЕВАНИЙ | 1991 |
|
RU2007755C1 |
| Устройство для учета и контроля работы экскаватора | 1979 |
|
SU872668A1 |
| Цифровой преобразователь координат | 2017 |
|
RU2661789C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СЧЁТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СТАТИЧЕСКИЙ | 2018 |
|
RU2695451C1 |
| СЧЕТЧИК ГАЗА | 2012 |
|
RU2488780C1 |


Изобретение относится к области измерительной техники и может быть применено в измерительных приборах, имеющих информационный выход в виде вала, и механическое счетное устройство. Способ заключается в задании двух дискретных значений передаточных отношений передаточного механизма между валом и счетным устройством и фиксированных по величине интервалов угла поворота вала. В соответствии со средним значением корректирующего показателя в течение предыдущего фиксированного интервала угла поворота вала на последующем задают первое дискретное значение передаточного отношения, в зависимости от среднего значения корректирующего показателя осуществляют переключение на второе дискретное передаточное отношение. Устройство (вариант 1) содержит датчик числа оборотов вала, счетчик, дешифратор, блок задержки, два запоминающих регистра, два ждущих мультивибратора, два электромагнита, цифровой компаратор, цифровой сумматор, постоянное запоминающее устройство, датчик корректирующего показателя, аналого-цифровой преобразователь. Счетчик, на вход которого поступают импульсы от датчика оборотов вала, определяет измерительный интервал, на протяжении которого измеряется и усредняется с помощью цифрового сумматора значение корректирующего показателя. В начале измерительного интервала, с помощью передаточного механизма, представляющего собой две цилиндрические передачи с разными коэффициентами передач, переключаемые с помощью двух электромагнитов, задается первое передаточное отношение. При достижении значения измерительного интервала величины, зависящей от среднего значения корректирующего показателя и хранимой в виде таблицы в ПЗУ, производится переключение на второе передаточное отношение. Устройство (вариант 2) содержит два датчика числа оборотов вала, датчик корректирующего показателя, две обмотки, пять резисторов, конденсатор, батарею питания, диод, звуковой излучатель, микропроцессор с двумя входами аналого-цифрового преобразователя, десятью входами ввода-вывода дискретной информации, входом внешнего прерывания. Программным путем, за счет счета импульсов датчиков оборотов вала, задается измерительный интервал, на протяжении которого измеряется и усредняется с помощью микропроцессорного контроллера значение корректирующего показателя. В начале измерительного интервала с помощью передаточного механизма, представляющего собой вал с двумя втулками, вращение вала передается на входной вал счетного устройства путем фрикционного сцепления двух втулок с помощью электромагнита. При достижении значения измерительного интервала величины, зависящей от среднего значения корректирующего показателя и хранимой в виде таблицы в памяти контроллера, производится расцепление втулок с помощью второго электромагнита. Технический результат - уменьшение погрешности измерений, повышение надежности и упрощение технической реализации прибора. 3 н. и 2 з.п. ф-лы, 5 ил.
| КРЕМЛЁВСКИЙ П.П | |||
| Расходомеры и счетчики количества, Справочник | |||
| - Л.: Машиностроение, 1989, с.334 | |||
| US 3981632 A, 21.09.1976 | |||
| ЕР 0772032 А2, 18.09.1996 | |||
| Способ поверки и градуировки электромагнитных расходомеров | 1981 |
|
SU1012031A1 |

