Изобретение относится к измерительной и вычислительной технике и может найти применение в специализированных вычислительных устройствах дискретного действия и электроизмерительных приборах для вычисления по известным ортогональным проекциям измерительной величины ее амплитуды и фазы и наоборот.
Известные устройства аналогичного назначения содержат генератор импульсов, счетчики импульсов, счетчик фазы с шифратором и различителем квадрантов, блок управления, ключи и схему переноса.
Но они не выполняют некоторые операции. Например, по амплитуде и фазе найти ортогональные проекции.
Наиболее близким к заявляемому является цифровой преобразователь координат [а.с. СССЗ №453690, 1975 г.], содержащий суммирующие и реверсивный счетчики, генератор импульсов, счетчик фазы, соединенный с шифратором и различителем квадрантов, ключи, блок управления и схему переноса. Кроме того, содержит блоки умножения, один из входов которых соединены с шифратором, другие через первый ключ с генератором импульсов и через реверсивный счетчик со схемой переноса, который подключен к суммирующим счетчикам, а выходы блоков умножения соединены с одними из входов второго и третьего ключей, подключенных к суммирующим счетчикам и блоку управления, соединенному с реверсивным счетчиком, схемой переноса, счетчиком фазы и первым ключом и компаратор, входы которого соединены с одними из выходов второго и третьего ключей, а выход - с блоком управления.
Его недостатком является низкая достоверность результатов.
Задача изобретения - совершенствование преобразования координат.
Технический результат - обеспечение полной достоверности результатов за счет оптимальных связей между блоками преобразователя.
Технический результат в цифровом преобразователе координат, содержащем суммирующие и реверсивный счетчики, генератор импульсов, счетчик фазы, соединенный с шифратором и различителем квадрантов, ключи, блок управления, схему переноса, кроме того содержащий блоки умножения, один из входов которых соединен с шифратором, другие через первый ключ с генератором импульсов и через реверсивный счетчик со схемой переноса, подключенной к суммирующим счетчикам, а выходы блоков умножения соединены с одними из входов второго и третьего ключей, подключенных к суммирующим счетчикам и блоку управления, соединенному с реверсивным счетчиком, схемой переноса, счетчиком фазы и первым ключом, и компаратор, входы которого соединены с одним из выходов второго и третьего ключей, а выход - с блоком управления, достигается за счет разделения каналов (линий) управления вторым и третьим ключами со стороны блока управления, а также за счет изменения направления хода сигналов между первым ключом, блоком умножения и реверсивным счетчиком и между цифровым компаратором и блоком управления на противоположное.
Это является новым техническим решением, поскольку результаты проведенного заявителем анализа аналогов и прототипа не позволили выявить признаки, тождественные всем существенным признакам данного изобретения.
Предложенный цифровой преобразователь координат промышленно применим, поскольку его техническая реализация возможна с использованием типовых элементов микроэлектронной техники (интегральных логических схем).
В устройстве реализуется следующий способ преобразования координат.
Пусть X и Y - проекции вектора  в прямоугольной системе координат, то есть
в прямоугольной системе координат, то есть


где ϕ - угол между вектором и осью X, отсчитываемый против часовой стрелки, Z - модуль вектора .
Запишем произведения


Рассмотрим сумму модулей X' и Y':

Если выбрать 

Таким образом, при β=ϕ сумма модулей |Х'| и |Y'| максимальна и равна модулю Z.
Следовательно, суть вычисления модуля Z и фазы ϕ вектора по известным значениям ортогональных составляющих X и Y сводится к выполнению операций согласно выражениям (3), (4), (5) до обеспечения условий (6) и (7).
Если заданы модуль Z и фаза ϕ вектора и необходимо решить обратную задачу - вычислить прямоугольные координаты X и Y, то в этом случае вычислителем реализуются соотношения (1) и (2).
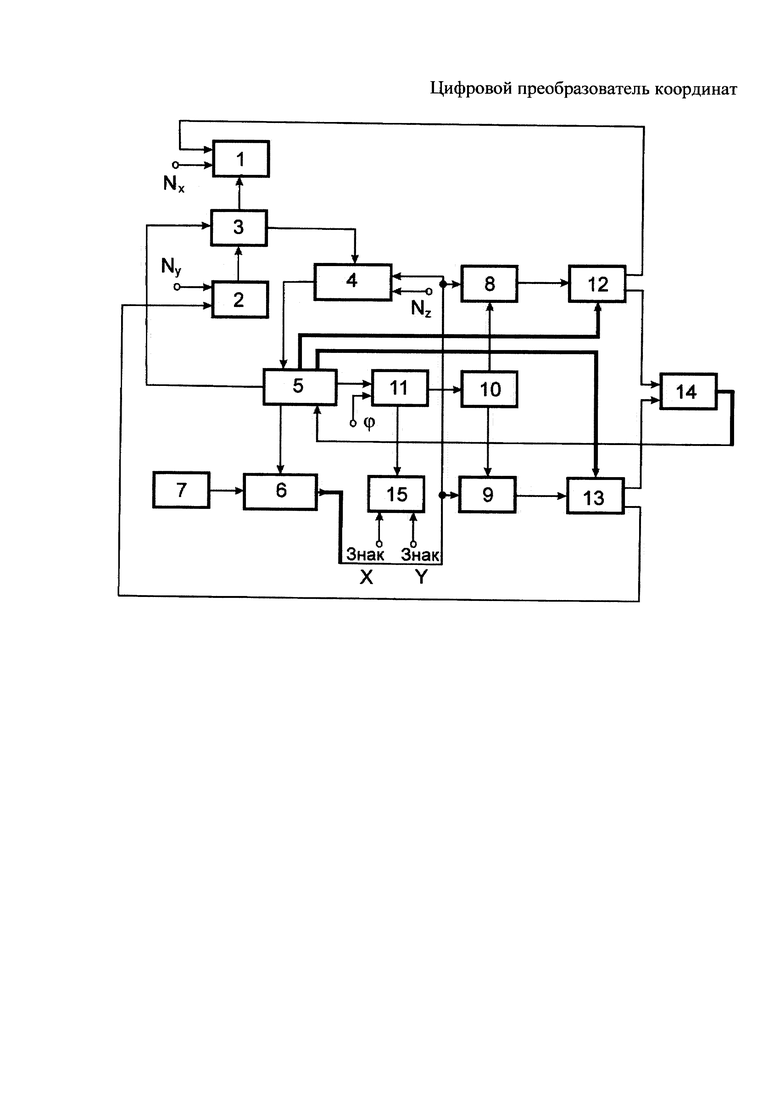
Структурная схема предлагаемого цифрового преобразователя координат приведена на чертеже.
В состав преобразователя входят суммирующие счетчики 1, 2 кодов Nx и Ny, (проекций X, Y), схема переноса 3, реверсивный счетчик 4, блок управления 5, первый ключ 6, генератор импульсов 7, блоки умножения 8, 9, шифратор 10 дискретных значений функций sinβ и cos β, реверсивный счетчик фазы 11, ключи второй 12 и третий 13, цифровой компаратор 14 и различитель квадрантов 15.
Суммирующие счетчики 1, 2 служат для записи соответственно кодов Nx, Ny ортогональных проекций X, Y вектора Z. Эти счетчики поразрядно посредством схемы переноса 3 соединены с реверсивным счетчиком 4. Схема переноса 3 соединена с блоком управления 5, формирующим тактовые импульсы и потенциальные сигналы, синхронизирующие работу устройства.
Генератор импульсов 7 через первый ключ 6 соединен с импульсными входами обоих блоков умножения 8, 9. Потенциальные входы блоков умножения подключены к шифратору дискретных значений 10, реверсивному счетчику фазы 11, счетный вход которого соединен с блоком управления 5. Выходы блоков умножения 8, 9 через второй 12 и третий 13 ключи, соответственно, подключены, с одной стороны к счетным входам суммирующих счетчиков 1, 2 и, с другой стороны, к входу цифрового компаратора 14.
Режим работы цифрового компаратора 14 и ключей 6, 12, 13 задаются тремя управляющими сигналами блока управления 5. В свою очередь, в блок управления 5 поступают сигналы с выходов реверсивного счетчика 4 и цифрового компаратора 14.
Реверсивный счетчик фазы 11 соединен с различителем квадрантов 15.
Возможны два режима работы вычислителя:
1) режим вычисления модуля Z и фазы ϕ по известным значениям проекций X, Y;
2) режим вычисления проекций X, Y по известным значениям модуля Z и фазы ϕ;
Рассмотрим первый режим работы вычислителя.
В исходном состоянии вычислителя в суммирующие счетчики 1 и 2 записаны коды Nx и Ny проекций X, Y, соответственно.
По сигналам блока управления 5 код Nx из счетчика 1 через схему переноса 3 записывается в реверсивный счетчик 4 на вычитание и открываются первый 6 и второй 12 ключи. Через первый ключ 6 импульсы с генератора 7 поступают на блоки умножения 8, 9 и в реверсивный счетчик 4 на суммирование. На другие входы блоков умножения 8, 9 с шифратора 10 дискретных значений, управляемого реверсивным счетчиком фазы 11, полагаются соответственно cos β0 и sin β0 т.е. Nc0 и Ns0.
С выхода блока умножения 8 импульсы, пропорциональные произведению Nc0⋅Nx, через второй ключ 12 поступают в цифровой компаратор 14. С выхода блока умножения 9 импульсы в цифровой компаратор 14 не проходят, поскольку третий 13 ключ закрыт своим сигналом от блока управления 5. При поступлении на реверсивный счетчик 4 импульсов он переполняется (устанавливается в нулевое состояние) и на его выходе формируется импульс, поступающий на блок управления 5. С выхода блока умножения 8 в цифровой компаратор 14 поступит K⋅Nco⋅Nx импульсов, где K - коэффициент пропорциональности.
Блок управления 5 формирует управляющие сигналы, которыми показания суммирующего счетчика 2 (код Ny) через схему переноса 3 записываются в счетчик 4, первый 6 и второй 12 ключи закрываются, а третий 13 ключ открывается каждый своим сигналом от блока управления 5.
С некоторой задержкой, необходимой для завершения переходных процессов в устройстве, первый ключ 6 открывается, и импульсы с генератора 7 поступают на блоки умножения 8, 9. С этого момента в цифровой компаратор 14 поступают импульсы с выхода блока умножения 9 через открытый третий 13 ключ. При возвращении реверсивного счетчика 4 в нулевое состояние на его выходе формируется импульс, поступающий в блок управления 5. К этому моменту с выхода блока умножения 9 в цифровой компаратор 14 поступит K⋅Nco⋅Nx импульсов, которые суммируются с предыдущим количеством импульсов. В результате в цифровом компараторе 14 будет записано число импульсов
No=K(Nc0Nx+Ns0Ny).
С некоторой задержкой открывается первый 6 ключ и описанные выше процессы в устройстве повторяются с тем отличием, что от шифратора 10 на входы блоков умножения 8, 9 подаются коды Ncl и Nsl косинуса и синуса угла β1=(β0+Δβ1), а с выходов блоков умножения 8, 9 в цифровой компаратор 14 поступают пакеты импульсов K⋅Ncl⋅Nx и K⋅Nsl⋅Ny. Суммарное количество импульсов, поступившее в цифровой компаратор 14, будет равно:
N1=K(Nc1⋅Nx+Nsl⋅Ny).
В цифровом компараторе 14 коды N0 и N1 сравниваются и в зависимости от их отношения изменяются показатели реверсивного счетчика фазы 11. Если N0<N1, то код реверсивного счетчика фазы 11 увеличится до  угла β2 так, что Δβ2>Δβ1. Если же N0>N1, то код реверсивного счетчика фазы 11 уменьшается до , так что Δβ2<Δβ1. В дальнейшем работа схемы повторяется циклически до
угла β2 так, что Δβ2>Δβ1. Если же N0>N1, то код реверсивного счетчика фазы 11 уменьшается до , так что Δβ2<Δβ1. В дальнейшем работа схемы повторяется циклически до  -го цикла, когда
-го цикла, когда  При этом код
При этом код  реверсивного счетчика фазы 11 соответствует углу
реверсивного счетчика фазы 11 соответствует углу  , при котором выполняется условие (7), то есть
, при котором выполняется условие (7), то есть 
Очевидно, когда N2 пропорционален модулю Z, а код  записанный в реверсивном счетчике фазы 11, пропорционален ϕ.
записанный в реверсивном счетчике фазы 11, пропорционален ϕ.
Закон изменения Δβi (приращений угла β0) определяется принятым алгоритмом уравновешивания. Наиболее просто реализуется алгоритм, при котором Δβi изменяется единичными ступенями, определяемыми погрешностью дискретности Δβ1 вычисления фазы ϕ.
Различитель квадрантов 15 определяет квадрант, в котором находится вектор , и, исходя из этого, управляет работой реверсивного счетчика фазы 11.
Рассмотрим принцип действия вычислителя во втором режиме. В исходном состоянии коды модуля Nz и фазы Nϕ записываются в реверсивный счетчик 4 и реверсивный счетчик фазы 11, соответственно, ключи 6, 12, 13 закрыты каждый своим сигналом от блока управления 5, суммирующие счетчики 1, 2 находятся в нулевом состоянии.
В зависимости от величины Nϕ с реверсивного счетчика фазы 11 в различитель квадрантов 15 выдается сигнал, по которому определяются знаки проекций X, Y.
По сигналу блока управления 5 открываются все электронные ключи 6, 12, 13, причем два ключа 12, 13 устанавливаются в состояние, при котором к выходам блоков умножения 8, 9 подключаются соответственно суммирующие счетчики 1,2. Через открытый ключ 6 импульсы с генератора импульсов 7 поступают одновременно на блоки умножения 8, 9 и в суммирующий счетчик 4 на списывание его показаний. С выхода блоков умножения импульсы через два открытых ключа 12, 13 поступают на счетчики 1, 2, соответственно.
Когда с суммирующего счетчика 4 будет списано полностью количество импульсов Nz, импульс переполнения с его выхода поступит на блок управления 5, который закроет ключи 6, 12, 13. На этом процесс вычисления заканчивается. Очевидно количество импульсов Nx и Ny, поступившее в суммирующие счетчики 1, 2 будет пропорционально проекциям X и N, соответственно.
Введение оптимальных связей между отдельными блоками преобразователя обеспечило полную достоверность результатов его функционирования.
Благодаря разделению каналов управления вторым 12 и третьим 13 ключами со стороны блока управления 5, а также благодаря изменению направления хода сигналов между первым 6 ключом, и блоками умножения 8, 9 и реверсивного счетчика 4 и также между цифровым компаратором 14 и блоком управления 5 - на противоположное была обеспечена полная достоверность результатов его функционирования по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ КООРДИНАТ | 1972 |
|
SU453690A1 |
| Устройство для преобразования координат | 1980 |
|
SU898426A1 |
| Цифровой преобразователь координат | 1980 |
|
SU942004A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ С ОГРАНИЧЕННЫМ СПЕКТРОМ (ВАРИАНТЫ) | 2004 |
|
RU2265278C1 |
| Цифровой генератор гармонических колебаний | 1979 |
|
SU873382A1 |
| ЦИФРОВОЙ СЧЕТЧИК ЭЛЕКТРОЭНЕРГИИ КСР-ТИПА | 1991 |
|
RU2061243C1 |
| Измеритель параметров амплитудномодулированных сигналов | 1978 |
|
SU752195A1 |
| Устройство для автоматического контроля геометрических размеров объекта при деформации | 1983 |
|
SU1219915A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1990 |
|
RU2028730C1 |
| Устройство для измерения координатных искажений фокусирующе-отклоняющей системы и передающей электронно-лучевой трубки | 1989 |
|
SU1660212A1 |
Изобретение относится к измерительной и вычислительной технике и может найти применение в специализированных вычислительных устройствах дискретного действия. Технический результат заключается в повышении достоверности результатов. Цифровой преобразователь координат содержит суммирующие и вычитающие счетчики, генератор импульсов, счетчик фазы, шифратор, различитель квадрантов, ключи, блок управления, схему переноса, блоки умножения с их взаимными связями. 1 ил.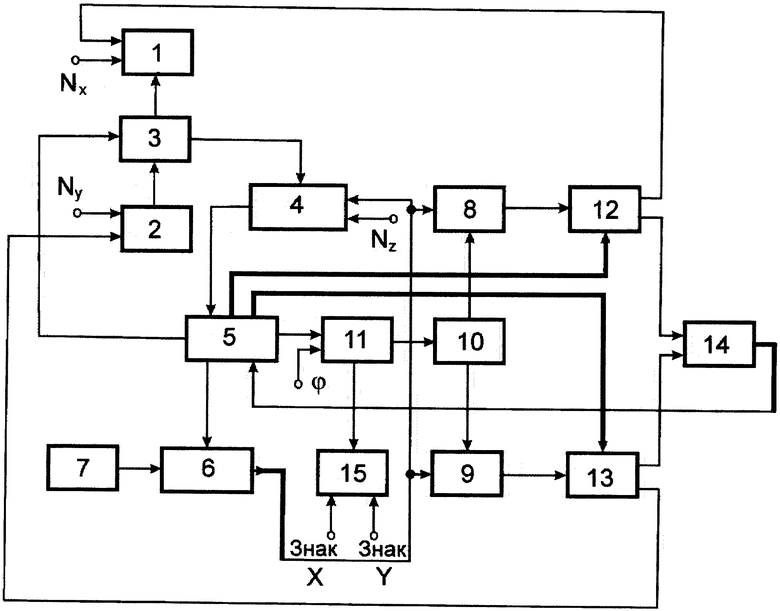
Цифровой преобразователь координат, содержащий суммирующие и реверсивный счетчики, генератор импульсов, счетчик фазы, соединенный с шифратором и различителем квадрантов, ключи, блок управления, схему переноса, кроме того, содержащий блоки умножения, один из входов которых соединен с шифратором, другие через первый ключ с генератором импульсов и через реверсивный счетчик со схемой переноса, подключенной к суммирующим счетчикам, а выходы блоков умножения соединены с одними из входов второго и третьего ключей, подключенных к суммирующим счетчикам и блоку управления, соединенному с реверсивным счетчиком, схемой переноса, счетчиком фазы и первым ключом, и компаратор, входы которого соединены с одним из выходов второго и третьего ключей, а выход - с блоком управления, отличающийся тем, что разделяют каналы управления вторым и третьим ключами со стороны блока управления, а также осуществляют ход сигналов между первым ключом, блоками умножения и реверсивного счетчика и между цифровым компаратором и блоком управления в противоположном направлении.
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ КООРДИНАТ | 1972 |
|
SU453690A1 |
| Цифровой преобразователь координат | 1980 |
|
SU942004A1 |
| Цифровой преобразователь координат | 1977 |
|
SU742944A1 |
| Устройство для формования тестовых заготовок | 1982 |
|
SU1094603A1 |

