(54) УСТРОЙСТВО ДЛЯ УЧЕТА И КОНТРОЛЯ РАБОТЫ . ЭКСКАВАТОРА ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работы экскаватора-драглайна | 1976 |
|
SU643597A1 |
| Способ дозированной загрузки транспортных средств одноковшовым экскаватором и устройство для его осуществления | 1983 |
|
SU1193465A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ контроля и учета работы экскаватора-мехлопаты | 1987 |
|
SU1425277A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Устройство автоматического контроля загрузки ковша экскаватора | 1978 |
|
SU866076A1 |
| Способ контроля углов поворота платформы экскаватора-драглайна при выполнении вскрышных бестранспортных работ | 1983 |
|
SU1139803A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Устройство для автоматического учета выработки экскаватора | 1974 |
|
SU600264A1 |
| Тренажер машиниста одноковшового экскаватора | 1986 |
|
SU1350659A1 |
Изобретение относится к автоматизации
управления одноковшовыми экскаваторами, а именно к устройствам для учета и контроля их работы.
Известно устройство, предназначенное для контроля эффективности управления процессом копания экскаватора, включаЬщее в себя датчик скорости выдвижения рукояти, датчик усилия, множительное устройство, интегратор и прибор-указатель. В устройстве вычисляется мощность, затрачиваемая на заполнение ковша, и производится сравнение с эталонным значением. Индицируемое прибором-указателем отклонение позволяет машинисту оценить эффективность процесса показания- и принять при необходимости меры по улучшению работы и более полному использованию машины
Недостатком этого устройства является то, что его функциональные возможности ограничены, поскольку оно позволяет контролировать лишь один из процессов экскавационного цикла - процесс заполнения ковша, и при этом только с точки зрения использования мощности привода. Оценку полноты заполнения ковша, времени выполнения отдельных операций цикла, общего времени цикла, а также оценка основных интегральных показателей - выработки, полного времени работы и т. п. не производится из-за отсутствия в составе устройства необходимых для этого- технических
средств.
Наиболее близко по технической сущности к предлагаемому устройство дЛя учета и контроля работы экскаватора, содержащее схемы управления приводами и датчик по,... ложения поворотной платформы, выходы которых соединены с входами блока управления, датчик временных интервалов, соединенный с входами счетчиков. времени цикла и общего времени работы, блок загрузки ковша, выход которого соединен со входом счетчика количества вынутого грунта. При этом блок управления соединен с входами счетчиков времени цикла, общего времени работы и блока загрузки ковша, .. Кроме того, устройство содержит логические элементы И, ИЛИ, датчик положения ковша,
20 блоки задержки памяти с соответствующими связями. В ходе рабочего процесса устройство позволяет определить количество вынутого .грунта, общее время работы и выполнения цикла. Возможен также учет времени работы экскаватора нутем суммирования времени выполнения отдельных циклов 2.
Недостатком устройства является его малая эффективность, как устройства автоматического контроля. Вырабатываемая устройством информация является недостаточной для текущего контроля работы экскаватора. Эта информация не позволяет получить оценку рациональности реализуемого режима управления процессом экскавации, ритмичности загрузки машин в течение смены или на более длительном интервале времени, использования технических возможностей экскаватора и др. Это, в свою очередь, делает затруднительной оценку машинистом своей работой с точки зрения выполнения планового задания, не позволяет оценить необходимость повышения интенсивности работы или достаточность ее сохранения на достигнутом уровне, определить необходимое повышение производительности в каждом из рабочих циклов.
Цель изобретения - повышение эффективности контроля процесса экскавации и получение информации контроля для текущего управления работой экскаватора.
Поставленная цель достигается тем, что устройство дополнительно снабжено задатчиком эталонной производительности, индикатором контроля текущей производительности и арифметическим блоком, вхбды которого соединены с выходами блока управления, счетчика общего времени работы, счетчика количества вынутого грунта и задатчика эталонного значения производительности, а выход арифметического блока соединен с индикатором контроля текущей производительности.
Кроме того, устройство снабжено индикатором контроля в цикле экскавации, задатчиком номинальной производительности в цикле экскавации и вторым арифметическим блоком, входы которого подключены к выходам блока загрузки ковша, счетчика времени выполнения цикла экскавации и задатчика номинальной производительности в цикле экскавации, а выход арифметического блока соединен с входом индикатора контроля производительности в цикле экскавации, причем вход задатчика номинальной производительности подключен к выходу датчика положения платформы.
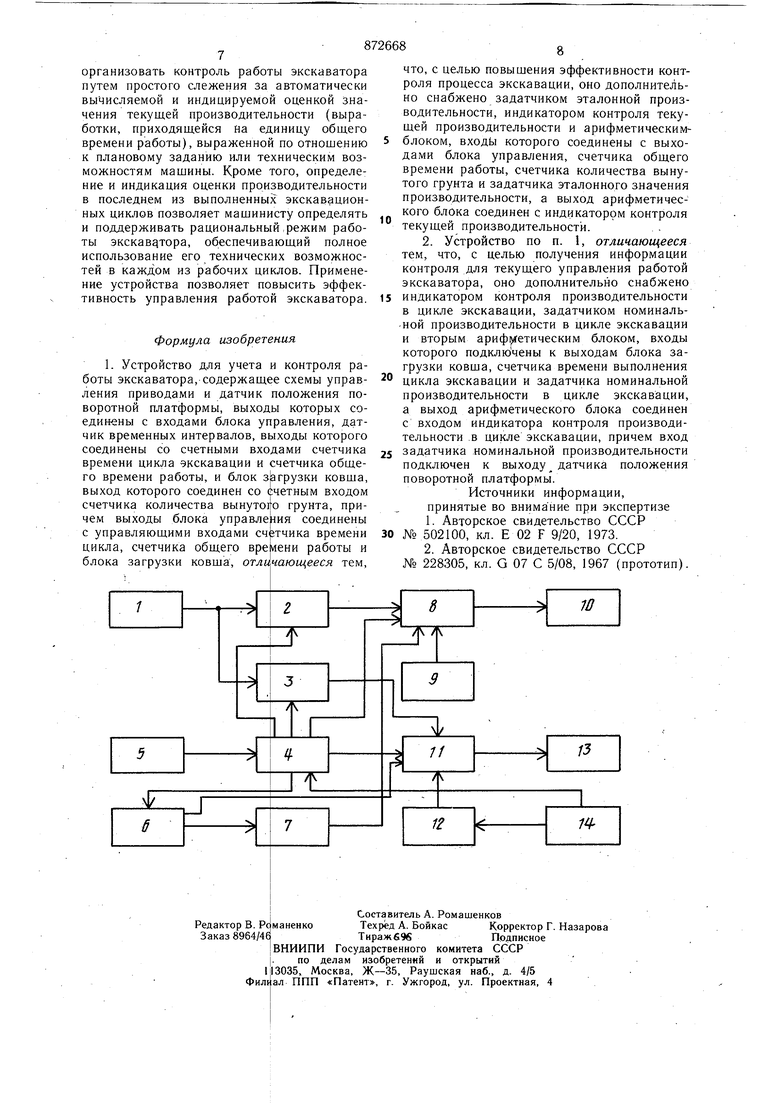
На чертеже представлена схема устройства.
Устройство содержит датчик 1 временных интервалов, выходы которого соединены с входами счетчиков 2 и 3. В качестве датчика может быть принята какая-либо из схем генераторов тактовых импульсов. Функциональное назначение датчика заключается в выработке сигнала по истечении временного интервала, принятого в качестве единичного. Наиболее простым и удобным выполнением счетчика 2 общего времени работы и счетчика 3 времени цикла экскавации является их выполнение в виде двоичных счетчиков на базе соответствующих электронных схем. Для индикации этих временных параметров на вход счетчиков могут быть параллельно подключены .электромеханические счетчики,используемые в существующих устройствах контроля и учета. Управление работой счетчиков (включение, сброс) выполняется блоком управления 4, для чего два выхода соединены с управляющими входами счетчиков.
Блок управления 4 представляет собой релейно-контактную схему с использованием свободных контактных групп контакторов и переключателей, входящих в схемы управления 5 приводами экскаватора, а также ряд логических блоков. Использование в блоке 4 элементов схем управления приводами 5 обозначено на схеме связью между выходом блока 5 и входом блока 4.
Блок загрузки ковща 6 обычно выполняется в виде электронной схемы, управляемой блоком управления 4 и вырабатывающей импульсы, количество которых пропорционально среднему значению тока якоря двигателя подъема ковша. Как для канатноковшовых, так и для экскаваторов типа «прямая каната степень загрузки ковша достаточно объективно можно оценивать по величине тока якоря двигателя подъема в период поворота платформы с груженым ковшом в сторону разгрузки после выхода двигателя подъема в установившийся режим. Этот принцип используется в большинстве известных учетных станций. Выход блока соединен с входом счетчика 7. Счетчик количества вынутого грунта 7 принципиально не отличается от счетчиков 2 и 3. Выход счетчика соединен с одним из счетных входов арифметического блока 8.
Арифметический блок 8 предназначен для выработки сигнала, пропорционального отношению текущей производительности к некоторому эталонному значению производительности. Управление работой блока 8 осуществляется блоком управления, для чего один из выходов блока 4 соединен с управляющим входом блока 8. Значение текущей производительности определяется как част- . ное от деления веса или объема грунта (выходной сигнал счетчика 7) на общее время работы (выходной сигнал счетчика 2). Реализация этой операции возможна, например, с помощью сумматора, на вход которого подаются исходные величины, и выход поступает на сдвиговый регистр или счетчик. Подобные схемы делителей диск 5етных величин известны и широко используются. Определение еще одного отношения - текущей производительности к эталонному значению - выполняется аналонично или, что предпочтительнее, совмещается с первой операцией. Ввод эталонного значения производнтся по одному из счетных входов блока, соединенному с задатчиком 9 эталонного значения производительности. Задатчик может быть выполнен, например, в виде потенциометрического преобразователя с последующим преобразованием сигнала непрерывно-дискретным преобразователем (при построении блока 8 на базе дискретной техники). Вход индикатора контроля текущего значения производительности 10 соединен с выходом арифметического блока 8. Индикатор 10 может быть реализован в виде стрелочного прибора или в виде газоразрядного -индикатора, высота светящегося столба в трубке которого пропорциональна входному сигналу. Функциональное назначение и устройство арифметического блока 11 аналогичны арифметическому блоку 8. Получение исходной информации обеспечивается соединением счетных входов с выходами блоков 3 и 6, а также задатчиком 12. Управляющий вход блока 11 соединен с одним из выходов блока управления 4. Устройство задатчика 12 номинальной производительности в цикле экскавации аналогично устройству задатчика 9. Задание, а также ввод поправок, осуществляющих его коррекцию с учетом крепости грунта, качества буровзрывных работ в забое и т. п. наиболее удобно осуществлять с помощью потенциометрических задатчиков с подачей выходных сигналов на сумматор и далее на непрерывно-дискретный преобразователь. Индикатор 13 контроля производительности в цикле экскавации аналогичен индикатору 10. Вход индикатора соединен с выходом арифметического блока 11. Датчик положения платформы 14 .представляет собой непрерывно-дискретный преобразователь (преобразователь угол-код), устанавливаемый на редукторе привода поворота. Один из выходов датчика соединен с входом задатчика 12, а другой - с блоком управления-4.. Устройство функционирует следующим образом. В процессе работы экскаватора датчиком временных интервалов 1 по истечении временного интервала, принятого в качестве единичного, вырабатывается сигнал, поступающий с выхода датчика на вход счетчика 2 общего времени работы. В качестве единицы времени можно принять, например, 1 с. Сигналы датчика 1 поступают также на вход счетчика 3 времени цикла экскавации. Управление счетчиками производится с выходов блока управления 4, вход которого, в свою очередь, соединен со схемами управления приводам 1 5 экскаватора. Работает также датчик и блок вычисления загрузки ковша:б. определяющии заполнение ковша по весу или объему. Управление работой блока включение для производства измерений - осуществляется с соответствующего выхода блока управления 4. С выхода блока 6 результат измерений (как правило, производится несколько замеров тока якоря двигателя и определяется среднее значение) поступает на вход счетчика 7 количества вынутого грунта, суммирующего , вес или объем грунта, вынутого в каждом цикле. После заверщения цикла экскавации на счетные входы арифметического блока 8 поступают сигналы с выхода счетчика количества вынутого грунта 7 и счетчика общего времени работы 2. В блоке определяется значение текущей производительности как отнощение веса (объема) вынутого- грунта к общему времени работы. Далее блоком 8 определяется отнощение текущей производительности, к некоторому ее эталонному значению, например эксплуатационной или технической производительности. Возможно также задание, вытекающее из плановых показателей. Ввод задания производится с помощью задатчика 9. Индикация отнощения значения текущей производительности к эталонному значению производится индикатором 10. После заверщения цикла экскавации на счетные входы арифметического блока 11 поступают сигналы с выхода.датчика з полнения ковша 6 и счетчика времени цикла экскавации 3. Производительность в цикле экскавации определяется как отнощение веса (объема) вынутого грунта к времени цикла. Далее блоком 11 определяется отнощение найденной величины к номинальной производительности g цикле, задаваемой задатчиком 12. В качестве номинального значения производительности цикла может быть принята некоторая экспериментально определенная величина. Возможно, например, принять в качестве номинального значение, получаемое при полЯом заполнении объема ковша, определив время выполнения цикла как сумму времени на заполнение ковша, поворот на загрузку и разгрузку. G выхода блока 11 сигнал, пропорциональный производительности в цикле, подается на индикатор 13. Для учета реальных горнотехнических условий в задатчик 12 вводится переключатель для ввода поправок на реальные условия работы в забое. В виде коэффициента к выходному сигналу задатчика учитывается крепость экскавируемых пород, качество буровзрывных работ и т. п. В задатчике автоматически опреде.дяется отношение действительного угла поворота на разгрузку (поступает от датчика 14) к принятому его номинальному значению, и в зависимости от этoгo отношения корректируется выходной сигнал. Таким образом, использование Предлагаемого устройства повышает эффективность контроля процесса экскавации, позволяет организовать контроль работы экскаватора путем простого слежения за автоматически вычисляемой и индицируемой оценкой значения текущей производительности (выработки, приходящейся на единицу общего времени работы), выраженной по отнощению к плановому заданию или техническим возможностям машины. Кроме того, определение и индикация оценки производительности в последнем из выполненных экскавационных циклов позволяет машинисту определять и поддерживать рациональный .режим работы экскаватора, обеспечивающий полное использование его технических возможностей в каждом из рабочих циклов. Применение устройства позволяет повысить эффективность управления работой экскаватора. Формула изобретения 1. Устройство для учета и контроля работы экскаватора, содержащее схемы управления приводами и датчик положения поворотной платформы, выходы которых соединены с входами блока управления, датчик временных интервалов, выходы которого соединены со счетными входами счетчика времени цикла экскавации и счетчика общего времени работы, и блок зЬгрузки ковша, выход которого соединен со счетным входом счетчика количества вынуто1|о грунта, причем выходы блока управления соединены с управляющими входами сч гтчика времени цикла, счетчика общего времени работы и блока загрузки ковша, отличающееся тем. что, с целью повышения эффективности контроля процесса экскавации, оно дополнительно снабжено задатчиком эталонной производительности, индикатором контроля текущей производительности и арифметическимблоком, входЬ которого соединены с выходами блока управления, счетчика общего времени работы, счетчика количества вынутого грунта и задатчика эталонного значения производительности, а выход арифметического блока соединен с индикатором контроля текущей производительности. 2. Устройство по п. 1, отличающееся тем, что, с целью получения информации контроля для текущего управления работой экскаватора, оно дополнительно снабжено индикатором контроля производительности в цикле экскавации, задатчиком номинальной производительности в цикле экскавации и вторым арифметическим блоком, входы которого подключены к выходам блока загрузки ковша, счетчика времени выполнения цикла экскавации и задатчика номинальной производительности в цикле экскавации, а выход арифметического блока соединен с входом индикатора контроля производительности .в цикле экскавации, причем вход задатчика номинальной производительности подключен к выходу датчика положения поворотной платформы. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 502100, кл. Е 02 F 9/20, 1973. 2. Авторское свидетельство СССР № 228305, кл. G 07 С 5/08, 1967 (прототип).
