Изобретение относится к весоизмерительной технике.
Известны устройства весового дозирования, имеющие весовой бункер, рычажную систему измерения и циферблатные квадрантные указатели с сельсинами /1/.
Эти устройства имеют значительную погрешность измерения и большие габариты.
Известно также устройство весового порционного дозирования, содержащее грузоприемный бункер, установленный на тензодатчиках, подключенных к блоку вычисления массы /2/.
Однако в данном устройстве не учитывается погрешность тензодатчиков при неравномерном распределении сыпучих материалов, тем самым не обеспечивается требуемая точность.
Цель изобретения - повышение точности дозирования.
Сущность изобретения заключается в равномерном распределении тензодатчиков по круглой раме для учета неравномерности распределения сыпучего материала при насыпании в бункер.
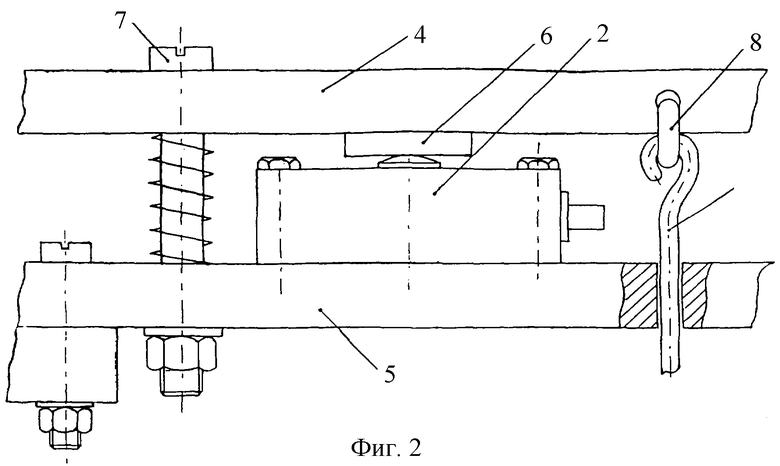
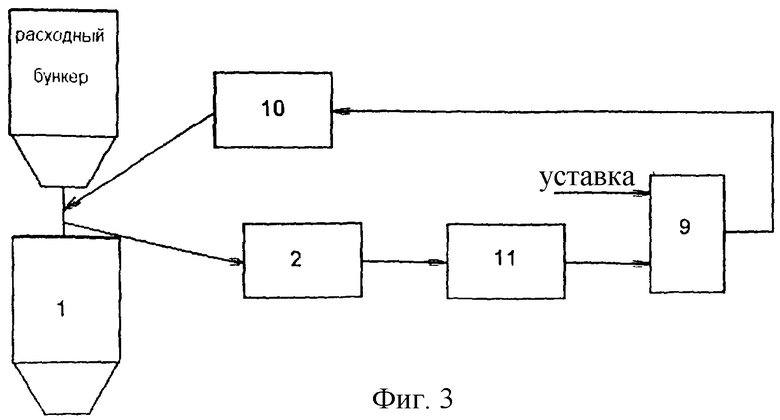
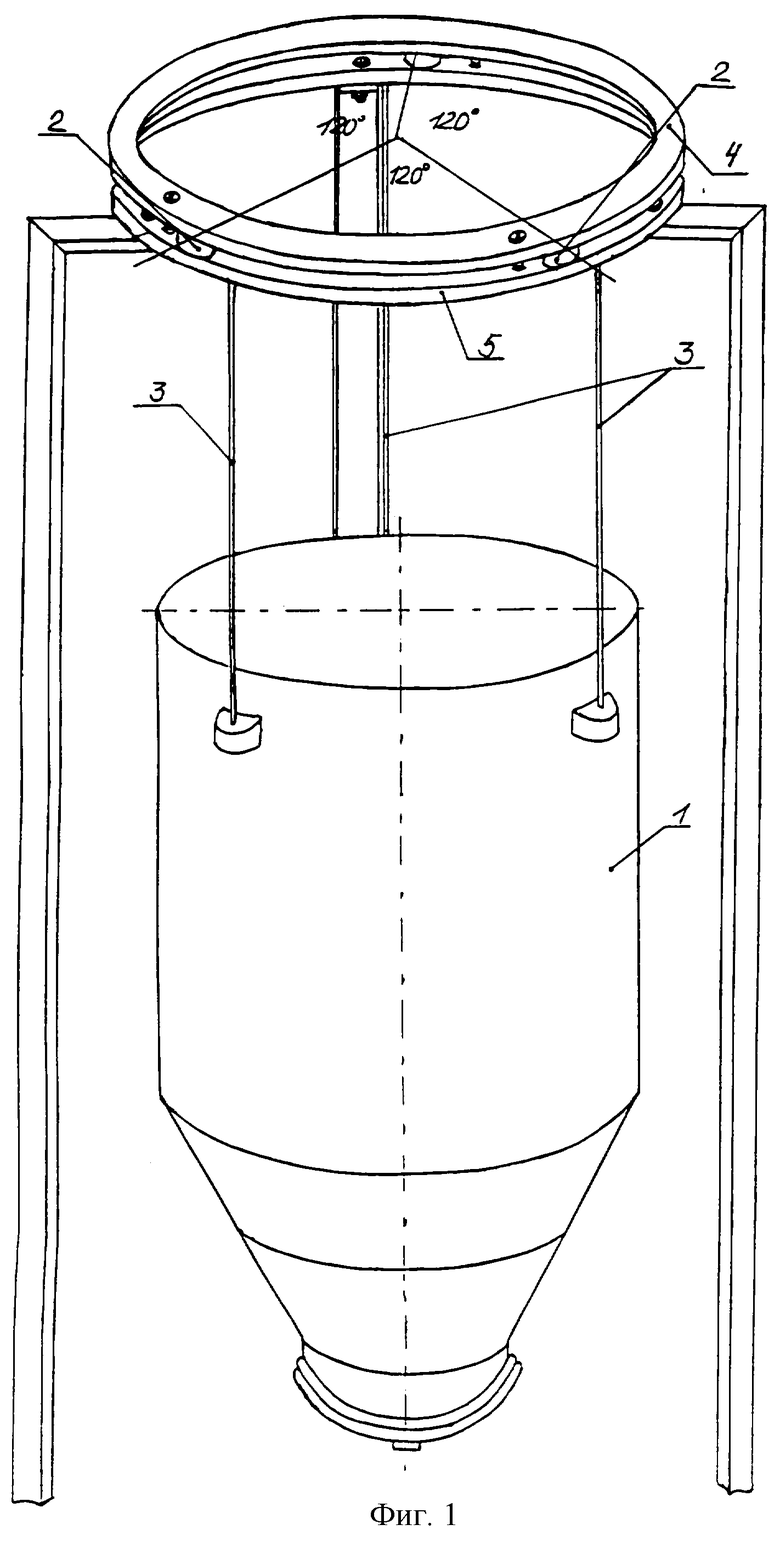
Устройство иллюстрируется чертежами: фиг.1 - общий вид устройства, фиг.2 - конструкция рамы, фиг.3 - структурная схема работы устройства.
Устройство весового дозирования включает в себя весовой бункер 1, силовые тензорезисторные датчики 2, тяги 3, круглую раму, состоящую из двух частей: верхней 4 и нижней 5, пластину 6, винты с пружинами 7, кольца 8, управляющее устройство 9, исполнительный механизм 10, весовой тензотерминал 11 (устройство 9 и тензотерминал 11 представляют собой блок вычисления масс). Нижняя часть рамы 5 жестко крепится к ферме, верхняя часть рамы 4 является подвижной относительно нижней части 5. Данные части крепятся между собой винтами с пружинами 7 таким образом, чтобы избежать отклонения направления измеряемой силы относительно продольной оси тензорезисторного датчика 2. Тензорезисторные датчики 2 расположены по раме равномерно относительно друг друга (например, под углом 120°). Каждый тензорезисторный датчик 2 крепится к нижней части рамы 5, а к верхней части рамы 4 приварена пластина 6, которая передает измеряемую нагрузку сферической поверхности упругого элемента тензорезисторного датчика 2. Весовой бункер подвешен на тягах 3, расположенных равномерно по окружности бункера, к верхней части рамы 4. Тяги 3, имеющие на своих концах крюки, проходят через отверстие в нижней части рамы 5 и крепятся к кольцам 8 верхней части рамы 4. Устройство работает следующим образом.
Оператор задает требуемый вес (уставку) сыпучего материала (например, цемента) с помощью управляющего устройства 9 (персональный компьютер), которое подает сигнал исполнительному механизму 10 (пневмоцилиндр с электропневматическим клапаном) на открытие заслонки расходного бункера. Из расходного бункера, расположенного над весовым бункером 1, начинает поступать сыпучий материал (цемент). По мере его поступления весовой бункер наполняется и передает какое-то усилие верхней части рамы 4 с помощью тяг 3. Под действием этого усилия верхняя часть рамы 4 действует на сферическую поверхность упругого элемента тензорезисторного датчика 2, в результате чего происходит измерение нагрузки (вес цемента). Электрический сигнал поступает с тензорезисторного датчика 2 на весовой тензотерминал 11, где преобразуется в цифровую форму и передается на персональный компьютер. Персональный компьютер с помощью программного обеспечения сравнивает поступающий сигнал с уставкой, заданной оператором. Когда сигнал достигает уставки, управляющее устройство 9 выдает сигнал исполнительному механизму 10 на закрытие заслонки расходного бункера. Таким образом осуществляется дозирование сыпучего материала.
Преимущество предлагаемого устройства состоит в том, что повышается точность дозирования, уменьшаются габариты системы измерения.
Данное устройство может быть изготовлено на стандартном оборудовании в промышленном производстве.
Источники информации
1. Карпин Е.Б. Средства автоматизации для измерения и дозирования массы. Изд. 2-е, перераб. и доп. М., Машиностроение, 1971.
2. Авт.св. № 648847, МПК G 01 G 13/28, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое весовое передвижное раздаточное устройство для сыпучих продуктов | 2023 |
|
RU2799280C1 |
| ПОРЦИОННЫЙ ВЕСОВОЙ ДОЗАТОР "БИДОЗАТОР РЯБКИНА | 1991 |
|
RU2018095C1 |
| МОДУЛЬНЫЙ ЗАВОД ПО ПРОИЗВОДСТВУ РАСТВОРОБЕТОННЫХ СМЕСЕЙ | 2012 |
|
RU2526944C2 |
| СПОСОБ ДОЗИРОВАНИЯ ИЗ БУНКЕРНЫХ ВЕСОВ | 2014 |
|
RU2561306C1 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| Устройство для затаривания емкостей сыпучим материалом | 1990 |
|
SU1735118A1 |
| ДОЗАТОР ВЕСОВОЙ | 2019 |
|
RU2721720C1 |
| ВЕСОВОЙ ПОРЦИОННЫЙ ДОЗАТОР | 1990 |
|
RU2018789C1 |
| МОДУЛЬ ДОЗИРОВАНИЯ МИКРОКОМПОНЕНТОВ | 2013 |
|
RU2534422C1 |
| Установка для дозирования материалов в бетоносмесительном узле | 1982 |
|
SU1066825A1 |
Изобретение относится к весоизмерительной технике. Устройство весового дозирования сыпучего материала содержит весовой бункер, подвешенный на тягах, круглую раму, силовые тензорезисторные датчики, подключенные к блоку вычисления масс. Для учета неравномерности распределения сыпучего материала при насыпании в бункер, тензорезисторные датчики распределяются равномерно по круглой раме (например, под углом 120°), состоящей из двух частей - верхней, к которой подвешен весовой бункер на тягах, расположенных равномерно по окружности бункера, и нижней, к которой крепятся датчики и жестко прикрепленной к ферме. Технический результат - повышение точности дозирования и уменьшение габаритов системы измерения. 3 ил.
Устройство весового дозирования сыпучего материала, содержащее бункер для весового дозирования, тензорезисторные датчики, подключенные к блоку вычисления масс, отличающееся тем, что тензорезисторные датчики располагают равномерно друг относительно друга по круглой раме, представляющей собой конструкцию из двух частей - верхней и нижней, причем датчики крепятся к нижней части рамы, жестко прикрепленной к ферме, а к верхней части рамы подвешен весовой бункер на тягах, расположенных равномерно по окружности бункера.
| Весовой порционный дозатор | 1977 |
|
SU648847A1 |
| Средства автоматизации для измерения и дозирования массы, Изд | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и доп | |||
| - М.: Машиностроение, 1971.SU 932267, 30.05.1982.US 3995517, 07.12.1976. | |||

