Изобретение относится к весоизмерительной технике.
Известен весовой порционный дозатор, содержащий грузоприемный бункер, опорными частями установленный на силоизмерительные датчики, закрепленные на раме, электромагниты, смонтированные на грузоприемном бункере, и грузы известной массы [1].
Тарировка этого весового порционного дозатора осуществляется с помощью грузов известной величины, периодически и одновременно присоединяемых к электромагнитам.
Основной недостаток известного весового порционного дозатора состоит в том, что тарировка производится в одной точке, причем в начальной точке из всего диапазона измерения. Вследствие этого такая тарировка по измеренной величине сигнала силоизмерительного датчика не позволяет судить об истинном весе материала в грузоприемном бункере, поскольку так называемый рабочий коэффициент передачи не является постоянным на всем диапазоне дозирования, т. е. точность измерения на остальной части диапазона измерения снижается.
Точность измерения веса материала снижается и из-за того, что электромагниты смонтированы на грузоприемном бункере, так как при заданном наибольшем пределе дозирования увеличение веса пустого грузоподъемного бункера требует применения силоизмерительных датчиков на большее усилие. Но чем больше нагрузочная способность силоизмерительного датчика, тем менее от точен. А увеличение веса грузоприемного бункера из-за электромагнитов может быть весьма значительным, поскольку тяговое усилие электромагнита в десятки раз меньше его собственного веса.
Наиболее близким по технической сущности и достигаемому результату к заявленному является весовой порционный дозатор [2]. Он содержит раму, грузоприемный бункер, опорными частями установленный на силоизмерительные датчики, каждый из которых снабжен тарировочным приспособлением, выполненным в виде нагружающего элемента с перемычкой, в которой установлен с возможностью перемещения винт, и размещенного под ним образцового датчика, расположенного соосно силоизмерительному датчику и винту.
Недостаток данного весового порционного дозатора состоит в следующем. После тарировки каждый образцовый датчик снимается. Для этого винт вращают так, что вначале маятниковый подвес опускается до положения, когда грузоприемный бункер коснется опорной части рамы, а затем еще до тех пор, пока между концом винта и образцовым датчиком не образуется зазор. При этом для создания зазора перемычку тем или иным образом поднимают. После демонтажа образцового датчика винт устанавливают соосно силоизмерительному датчику и перемещают его вниз до тех пор, пока грузоприемный бункер не потеряет контакт с рамой.
Следствие таких операций трудно избежать смещения силоизмерительных датчиков относительно опорных частей грузоприемного бункера, что ведет к появлению поперечной силы. В дополнение к этому силоизмерительные датчики оказываются под различной нагрузкой вследствие их неодинакового поднятия, при этом эти нагрузки отличаются и от тех, что были до и сразу же после тарировки.
Таким образом, точность известного весового порционного дозатора будет невелика.
Кроме того, известный весовой дозатор сложен в эксплуатации ввиду того, что винты должны опускать или поднимать маятниковые подвески с силоизмерительными датчиками практически синхронно. В противном случае неизбежно будет происходить смещение силоизмерительных датчиков от оси винтов из-за отклонения тяг какого-либо маятникового подвеса, вызванного негоризонтальным положением опорных частей грузоприемного бункера.
Цель изобретения - повышение точности весового позиционного дозатора и упрощение его эксплуатации.
Цель достигается тем, что в известном весовом порционном дозаторе, содержащем раму, грузоприемный бункер, опорными частями установленный на силоизмерительные датчики, каждый из которых снабжен тарировочным приспособлением, выполненным в виде нагружающего элемента с перемычкой, в которой установлен с возможностью перемещения винт, и размещенного под ним образцового датчика, расположенного соосно силоизмерительному датчику и винту, нагружающий элемент исполнен в виде П-образного кронштейна, концами закрепленного на раме, на которой установлен силоизмерительный датчик, причем образцовый датчик размещен на опорной части грузоприемного бункера, в него введены электрические нагреватели, установленные коаксиально винтам.
Новое исполнение нагружающего элемента, закрепление его и силоизмерительного датчика на раме, размещение образцового датчика на опорной части грузоприемного бункера позволяют производить тарировку силоизмерительных датчиков без изменения их пространственного положения, т. е. в заявленном весовом порционном дозаторе центр тяжести грузоприемного бункера при монтаже или демонтаже образцовых датчиков остается неизменным, что и обеспечивает повышение точности.
По этой же причине отпадает надобность в синхронном перемещении (ходе) винтов, что упрощает эксплуатацию заявленного весового порционного дозатора.
Введение электрических нагревателей, установленных коаксиально винтам, позволяет дополнительно повысить точность заявленного весового порционного дозатора за счет одинаковой установки показаний образцовых датчиков на реперных значениях, поскольку нагревом винтов можно обеспечить малые (микронные) перемещения их концов.
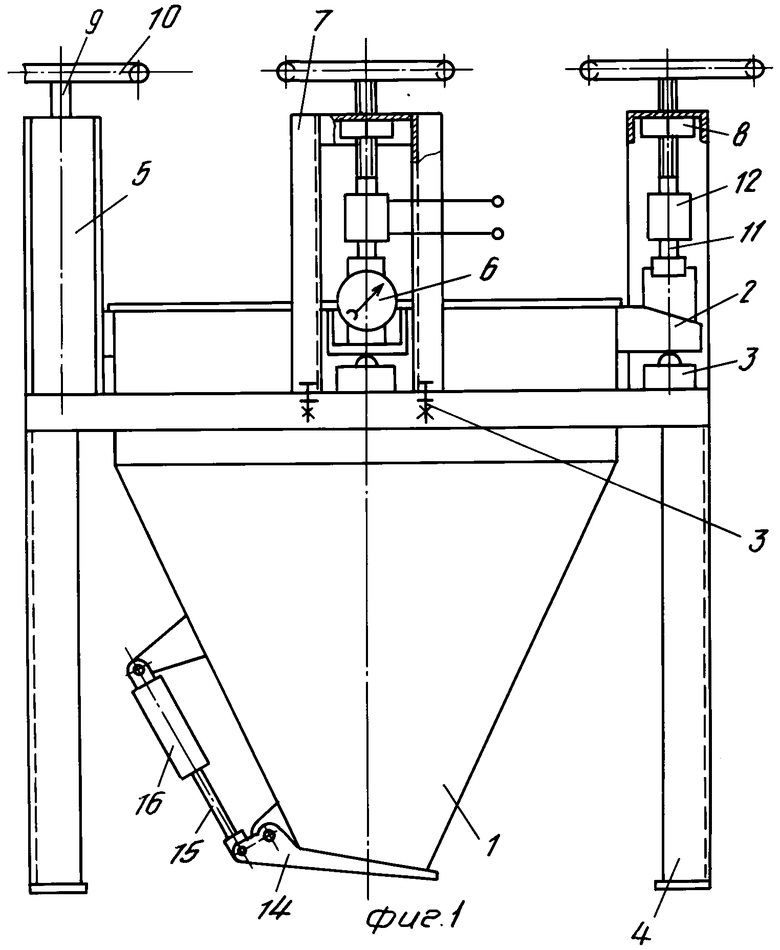
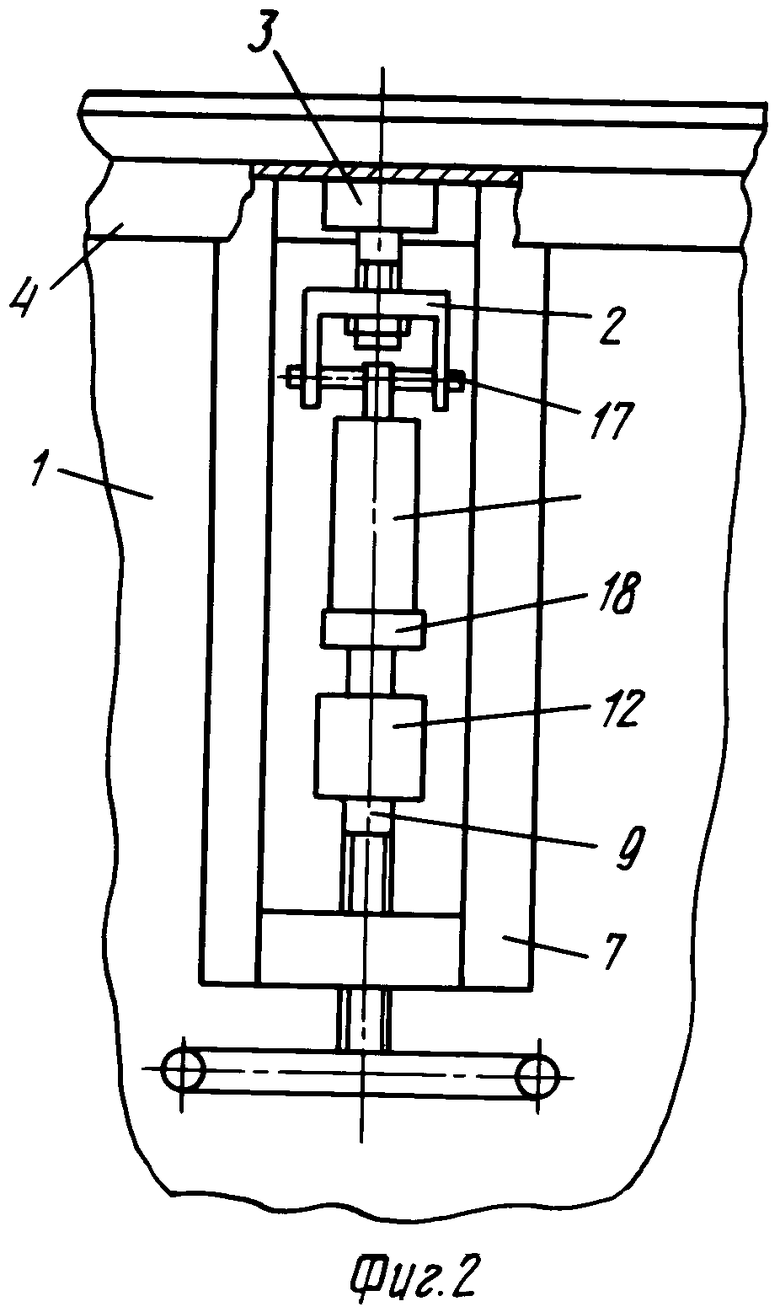
На фиг. 1 представлен весовой порционный дозатор, грузоприемный бункер которого лежит на силоизмерительных датчиках, общий вид; на фиг. 2 - то же, грузоприемный бункер подвешен к силоизмерительным датчикам.
Весовой порционный дозатор (фиг. 1) содержит грузоприемный бункер 1, лежащий опорными частями 2 на силоизмерительных датчиках 3, установленных на раме 4. Каждый силоизмерительный датчик снабжен тарировочным приспособлением, выполненным в виде нагрузочного элемента 5 и образцового датчика 6. Нагружающий элемент исполнен в виде П-образного кронштейна с концами 7 и перемычкой 8, через центр симметрии которой проходит винт 9 с возможностью перемещения в ней. На одном конце винта закреплен штурвал 10. Другой конец винта исполнен с цилиндрической частью 11, которая охвачена электрическим нагревателем 12, причем провода от него подключены к регулируемому источнику питания (на фиг. условно не показан).
Образцовый датчик 6, имеющий циферблатный указатель, установлен на опорной части 2 грузоприемного бункера 1 так, что размещен под винтом 9 соосно силоизмерительному датчику и винту. Концы 7 кронштейна закреплены на раме 4 с помощью болтового соединения 13. В нижней части грузоприемного бункера смонтирован затвор 14, приводимый в движение штоком 15 пневмоцилиндра 16.
Тарировка весового порционного дозатора производится следующим образом. Винт 9 с помощью штурвала 10 подводят к образцовому датчику 6 до соприкосновения так, чтобы его стрелка только слегка отклонилась от нулевого значения (менее одного деления шкалы).
После этого, в зависимости от программы тарировки (или экспериментов по изучению влияния несимметричной нагрузки на силоизмерительные датчики на точность весового порционного дозатора в целом), осуществляют нагружение силоизмерительных датчиков по возможности одновременно (моделирование симметричной загрузки грузоприемного бункера материалом), либо по отдельности (моделирование несимметричной загрузки грузоприемного бункера материалом).
Нагружение каждого силоизмерительного датчика до заданной реперной точки производят винтом вначале с помощью штурвала с недостатком, а потом точно - путем нагрева цилиндрической части винта электрическим нагревателем. О достижении реперной точки судят по показаниям образцового датчика.
После установления показаний образцового датчика производят сличение его показаний с показаниями измерительного прибора, измеряющего значение сигнала силоизмерительного датчика ( на фиг. не показан). В качестве измерительного прибора могут быть использованы известные приборы, например аналого-цифровой преобразователь, если применены тензорезисторные силоизмерительные датчики. Затем отключают электрический нагреватель и с помощью винта производят нагрузку силоизмерительного датчика до следующей реперной точки, потом осуществляют те же операции, что и с предыдущим измерением. Количество реперных точек может быть велико. Для получения больших усилий при значительном перемещении (ходе) винта может быть применен электропривод. При незначительном ходе винта (менее 0,3 мм) все реперные точки могут быть достигнуты с помощью электрического нагревателя.
На фиг. 2 изображен весовой порционный дозатор, у которого грузоприемный бункер 1 подвешен к раме 4 посредством тензорезисторного датчика 3 и опорной части 2, а в качестве образцового датчика взят также тензорезисторный силоизмерительный датчик, но более высокого класса точности. Он присоединен к опорной части посредством оси 17, а к винту - с помощью цанги 18.
Тарировка весового порционного дозатора в этом случае имеет некоторые особенности. Они состоят в том, что перед началом тарировки электрический нагреватель включают на максимальную мощность и затем с помощью винта 9 добиваются нулевого значения сигнала от образцового тензорезисторного силоизмерительного датчика с небольшим отклонением в отрицательный диапазон. Точную установку значений сигнала от образцового тензорезисторного датчика производят путем уменьшения мощности электрического нагревателя до тех пор, пока значение его сигнала не станет точно нулевым. В этот же момент фиксируют сигнал от тензорезисторного силоизмерительного датчика 3. Поскольку оба тензорезисторных силоизмерительных датчика являются датчиками нулевого перемещения, то нагружение их во всем диапазоне измерения производят за счет уменьшения степени нагрева цилиндрической части винта. Усилия, развиваемые в таком случае, могут достигать несколько десятков тонн.
Снабжение весового порционного дозатора предлагаемыми тарировочными приспособлениями позволяет производить его тарировку во всем диапазоне измерения с точностью, близкой к точности образцового датчика.
После тарировки образцовые датчики демонтируются без изменения пространственного положения грузоприемного бункера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРЦИОННЫЙ ВЕСОВОЙ ДОЗАТОР "БИДОЗАТОР РЯБКИНА | 1991 |
|
RU2018095C1 |
| УСТАНОВКА СИЛОИЗМЕРИТЕЛЬНАЯ ГИДРАВЛИЧЕСКАЯ ОБРАЗЦОВАЯ | 2003 |
|
RU2265813C2 |
| Устройство для весового учета количества перекачиваемой жидкости | 1982 |
|
SU1026017A1 |
| УСТРОЙСТВО ВЕСОВОГО ДОЗИРОВАНИЯ СЫПУЧЕГО МАТЕРИАЛА | 2003 |
|
RU2240515C1 |
| МАШИНА СИЛОЗАДАЮЩАЯ (СИЛОИЗМЕРИТЕЛЬНАЯ) СЖАТИЯ ОБРАЗЦОВАЯ | 2011 |
|
RU2456565C1 |
| МАШИНА ГИДРАВЛИЧЕСКАЯ СИЛОИЗМЕРИТЕЛЬНАЯ ОБРАЗЦОВАЯ | 1997 |
|
RU2122715C1 |
| СКБ ЦМА | 1973 |
|
SU387223A1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ | 1971 |
|
SU435460A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Способ поверки силоизмерительных преобразователей и устройство для его реализации | 1977 |
|
SU735942A1 |
Использование: весоизмерительная техника. Сущность изобретения: грузоприемный бункер упорами установлен на силоизмерительные датчики, например теплодатчики. Каждый из теплодатчиков снабжен тарировочным приспособлением, выполненным в виде нагружающего элемента и размещенного под ним образцового датчика. Нагружающий элемент выполнен в виде П-образного кронштейна, концами закрепленного на раме. В горизонтальной перемычке П-образного кронштейна соосно установлен нажимной винт. Коаксиально нажимному винту расположен нагревательный элемент. Образцовый датчик расположен соосно теплодатчику на упоре грузоприемного бункера. Теплодатчики размещены на раме. 1 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бункерные весы | 1980 |
|
SU972240A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
