Изобретение относится к области автоматики и измерительной техники. Изобретение решает задачу автоматизации промышленных испытаний асинхронных двигателей (АД) и электроприводов (ЭП) на их базе, повышает качество испытаний.
Известен способ амперметра постоянного тока, предполагающий для измерения частоты тока ротора применение амперметра постоянного тока и шунта, введенного в одну из фаз ротора (см. Жерве Г.К. Промышленные испытания электрических машин. - 4-е изд., сокр. и перераб. - Л.: Энергоатомиздат. Ленингр. отд-ние, 1984 г.), применяемый только для АД с фазным ротором и постоянно налегающими щетками. Частота ротора f2 вычисляется как отношение числа полных колебаний стрелки прибора к промежутку времени, за который эти колебания совершались:
где N - число полных колебаний стрелки;
t - промежуток времени за который совершались колебания.
Величина скольжения s определяется отношением частот ротора и статора:
где f1 - частота тока статора АД.
Недостатком является то, что данный способ невозможно применить при испытаниях АД с короткозамкнутым ротором, а также необходимостью измерения частоты сети питания АД дополнительным прибором.
Наиболее близким к предлагаемому по существу и решаемой задаче является способ, предполагающий использование газоразрядной лампы для создания стробоскопического эффекта (см. Жерве Г.К. Промышленные испытания электрических машин. - 4-е изд., сокр. и перераб. - Л.:Энергоатомиздат. Ленингр. отд-ние, 1984 г.). Стробоскопический эффект получается при освещении газоразрядной лампой диска с зачерненными секторами на торце вала испытуемой машины. Количество зачерненных секторов зависит от полюсности машины. Газоразрядная лампа подключается к сети питания АД. Скольжение s находится как отношение удвоенного числа оборотов диска при освещении газоразрядной лампой к промежутку времени, за который зачерненный диск совершал обороты.
где N - число оборотов диска с зачерненными секторами;
t - промежуток времени, за который проводился отсчет оборотов.
Недостатком указанного способа является то, что для осуществления измерения необходимо некоторое время, которое может составлять 10-15 с, за это время ротор испытуемого АД нагревается при испытаниях в режиме перегрузки, а также при проведении испытаний двигателей с большой величиной скольжения, что приводит к изменению величины скольжения во время замера скольжения, что в свою очередь приводит к ошибкам в измерении скольжения. Недостатками является также то, что при большой величине скольжения возникают трудности при отсчете оборотов зачерненного диска, что также влияет на точность результата.
Задачей, решаемой изобретением, является повышение помехоустойчивости, точности измерения, сокращение времени для осуществления измерения и возможность автоматизации процесса испытания АД.
Решение поставленной задачи достигается тем, что в качестве информационного сигнала используют сигнал постоянного напряжения, который масштабируют, инвертируют, после чего суммируют с сигналом опорного напряжения, значение которого определяют при синхронном вращении, полученную сумму усиливают до величины, пригодной для измерения, измеряют и по измеренной величине определяют скольжение асинхронного двигателя.
По сравнению с наиболее близким аналогом заявленное решение имеет отличительные черты:
- использование в качестве информационного - сигнала постоянного напряжения;
- использование в качестве опорного - сигнала постоянного напряжения, определяемого при синхронном вращении вала испытуемого АД;
- применение преобразователя постоянного напряжения с эффектом Холла;
- применение операции аналогового суммирования.
При использовании предлагаемого способа повышается помехоустойчивость, что обусловлено использованием в качестве информационного сигнала сигнала постоянного напряжения, уменьшается время, необходимое для осуществления измерения скольжения, за счет использования сумматора аналоговых сигналов.
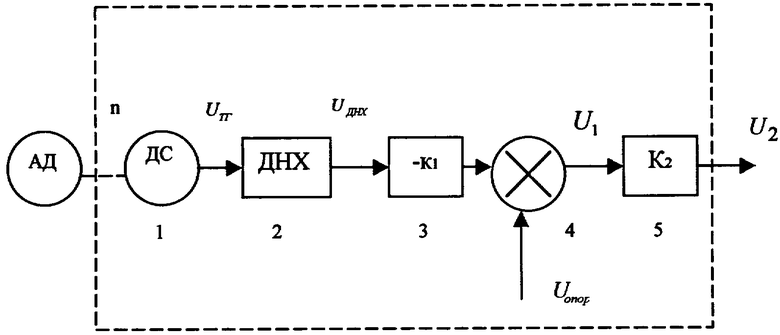
Примером реализации предложенного способа является устройство, блок-схема которого поясняется чертежом, на котором изображено устройство для измерения скольжения, содержащее датчик скорости 1, преобразователь постоянного напряжения с эффектом Холла 2, инвертирующий усилитель 3, аналоговый сумматор 4, усилитель выходного сигнала 5.
Способ измерения скольжения АД заключается в следующих действиях: датчиком скорости 1 преобразуют частоту вращения вала n АД в напряжение UТГ, сигнал UТГ масштабируют преобразователем постоянного напряжения 2. С выхода преобразователя сигнал UДНХ подают на инвертирующий усилитель 3, затем на первый вход сумматора 4. На второй вход сумматора 4 подают опорное напряжение Uопор, величину которого определяют при синхронном вращении вала АД так, чтобы выходное напряжение сумматора U1 стремилось к нулю справа. Выходное напряжение сумматора поступает на вход выходного усилителя 5, которое затем измеряют с помощью вольтметра постоянного тока.
Величину скольжения определяют по формуле
где k2 - коэффициент усиления выходного усилителя,
U2 - напряжение, измеряемое вольтметром постоянного тока.
При этом величина опорного напряжения Uопор устанавливается при
синхронном вращении испытуемой машины так, чтобы выполнялось условие

и при проведении испытаний АД подается на второй вход сумматора аналоговых сигналов.
Величина коэффициента усиления выходного усилителя выбирается таким образом, чтобы напряжение U2 находилось в пределах от 35 до 95% шкалы прибора, измеряющего U2, или от 35 до 95% максимального напряжения, измеряемого аналого-цифровым преобразователем, выполняющим функции вольтметра.
Помехоустойчивость достигается за счет использования в качестве информационного сигнала сигнала постоянного напряжения. Точность измерения достигается за счет осуществления операции над информационным сигналом на аналоговом уровне, обусловлена погрешностью измерения U2, точностью задания опорного напряжения Uопор и определяется формулой
Использование предлагаемого способа для промышленных испытаний АД позволяет автоматизировать процесс испытаний, повысить помехоустойчивость и точность измерения величины скольжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Автоматический стенд для испытаний трансмиссий | 1987 |
|
SU1460640A1 |
| УСТРОЙСТВО ИСПЫТАНИЙ ЧАСТОТНО-УПРАВЛЯЕМОГО ГРЕБНОГО ЭЛЕКТРОПРИВОДА СИСТЕМЫ ЭЛЕКТРОДВИЖЕНИЯ В УСЛОВИЯХ СТЕНДА | 2011 |
|
RU2462728C1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Электропривод испытательного стенда для асинхронных двигателей | 1985 |
|
SU1283932A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| Способ контроля электрической и маг-НиТНОй НЕСиММЕТРии POTOPA АСиНХРОННОгОдВигАТЕля | 1979 |
|
SU843111A1 |
Изобретение относится к области автоматики и измерительной техники. Изобретение решает задачу автоматизации промышленных испытаний асинхронных двигателей (АД) и электроприводов (ЭП) на их базе, повышает качество испытаний. При измерении скольжения асинхронных двигателей в качестве информационного сигнала используется сигнал постоянного напряжения, который масштабируют, инвертируют, после чего суммируют с сигналом опорного напряжения, значение которого определяют при синхронном вращении, полученную сумму усиливают до величины, пригодной для измерения, измеряют и по измеренной величине определяют скольжение асинхронного двигателя. Технический результат - повышение помехоустойчивости, точности измерения, сокращение времени и возможность автоматизации процесса испытаний. 1 ил.
Способ измерения скольжения асинхронных двигателей, отличающийся тем, что в качестве информационного сигнала используют сигнал постоянного напряжения, поступающий с датчика скорости, преобразующего скорость вращения вала асинхронного двигателя в постоянное напряжение, который масштабируют преобразователем постоянного напряжения с эффектом Холла, инвертируют, подавая сигнал на инвертирующий вход сумматора, после чего суммируют с сигналом опорного напряжения UОПОР, значение которого определяют при синхронном вращении вала испытуемого асинхронного двигателя так, чтобы выходное напряжение сумматора стремилось к нулю справа, и подают на неинвертирующий вход сумматора, выходное напряжение которого подают на вход выходного усилителя, затем измеряют с помощью вольтметра постоянного тока и определяют скольжение s асинхронного двигателя по формуле s=[U2/(к2 ·UОПОР)]100%, где к2 - коэффициент усиления выходного усилителя, U2 - напряжение, измеряемое вольтметром постоянного тока.
| ЖЕРВЕ Г.К | |||
| Промышленные испытания электрических машин | |||
| Л | |||
| - Энергоатомиздат, 1984, с.120-122 | |||
| US 4194129 А, 18.03.1980 | |||
| ЦИФРОВОЙ ТАХОМЕТР ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ | 1993 |
|
RU2082171C1 |
| US 4358734 А, 09.11.1982 | |||
| Устройство для определения скольжения асинхронного двигателя | 1989 |
|
SU1720137A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ЦЕЛЬНОТЯНУТЫХ ШЛЯП | 0 |
|
SU208967A1 |

