Изобретение относится к электротехнике и может быть использовано при разработке систем управления частотно-регулируемыми асинхронными двигателями.
Целью изобретения является упрощение устройства и повышение точности определения скольжения.
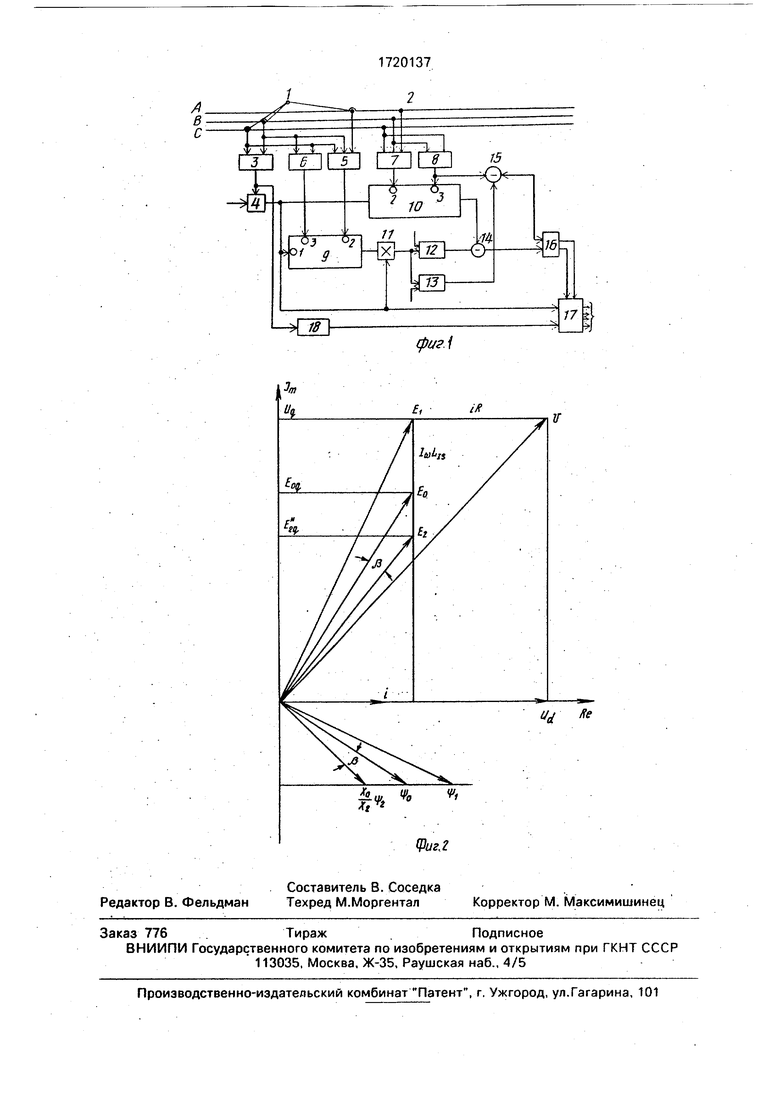
На фиг.1 представлена функциональная схема устройства для определения скольжения; на фиг.2 - векторная диаграмма двигателя.
Устройство для определения скольжения содержит датчик фазных токов 1, датчик фазных напряжений 2, нуль-орган 3, управляемый ключ 4, блоки определения действительной 5 и мнимой 6 составляющих тока, блоки определения действительной 7 и мнимой 8 составляющих напряжения, блоки преобразования координат тока и напряжения 9 и 10, блок умножения 11, первый и второй масштабный усилители 12, 13 и вычитатель 14.
Первые два выхода датчиков фазных токов 1 подключены к соответствующим входам блоков определения действительной 5 и мнимой 6 составляющих фазных токов и к входам нуль-органа 3, соединенного выходом с управляющим входом управляемого ключа 4, коммутирующий вход которого
VI
ho О
СО
ч
предназначен для подачи управляющих импульсов, а выход управляемого ключа 4 подключен к первым входам блока преобразования координат тока 9, блока напряжения 10 и к одному из входов блока умножения 11. Третий выход датчика фазных токов 1 соединен с третьим входом блока определения действительной составляющей тока 5,- выход которого соединен со вторым входом блока преобразования координат тока 9, а выход блока определения мнимой составляющей тока 6 соединен с третьим входом блока преобразования координат тока 9. Первые два выхода датчиков фазных напряжений 2 подключены к соответствующим входам блоков определения действительной 7 и мнимой 8 составляющей напряжения, а третий выход датчика фазных напряжений 2 соединен с третьим входом блока определения действительной составляющей напряжения 7, выход которого соединен со вторым входом блока преобразования координат напряжения 10, а выход блока определения мнимой составляющей напряжения 8 соединен с третьим входом блока преобразования координат напряжения 10, выход которого соединен с одним из входов вычитателя 14, второй вход которого соединен с выходом первого масштабного усилителя 12. Выход блока преобразования координат тока 9 соединен со вторым входом блока умножения 11, выход которого соединен со входами первого 12 и второго 13 масштабных усилителей.
В устройство для определения скольжения дополнительно введены вычитатель 15, нуль-орган 16, счетчик на четыре входа 17 и формирователь импульсов 18, причем выход блока определения мнимой составляющей напряжения 10 соединен с одним из входов вычитателя 15, второй вход которого соединен с выходом второго масштабного усилителя 13, а выход вычитателя 15 соединен с первым входом нуль-органа 16, второй вход которого соединен с выходом вычитателя 14. Два выхода нуль-органа 16 соединены соответственно с первыми двумя управляющими входами счетчика 17, третий управляющий вход которого через формирователь импульсов 18 соединен с управляющим входом управляемого ключа 4, выход которого соединен со счетным входом счетчика 17, выход которого образует выход устройства для определения скольжения асинхронного двигателя.
Поясним положения, на которых основана работа рассматриваемого устройства. На фиг.2 изображена векторная диаграмма асинхронного двигателя для момента времени, когда результирующий вектор
тока совпадает с действительной осью. Известно, что скольжение определяется уголомДхарактеризующим отставание вектора потокосцепления ротора V2 или соответстаующего ему вектора Еа, от вектора потокосцепления воздушного зазора ь или соответствующего ему вектора Е.0. Для этого следует определить время, которое необходимо для поворота вектора $г или соответствующего ему вектора Е2 на угол Д
Для определения скольжения необходимо
-определить момент времени, когда ре- зультирующий вектор тока совпадает с действительной осью, т.е. займет положение, изображенное на векторной диаграмме;
-перейти в этот момент времени к вращающейся системе координат и для этого
момента времени определить проекции вектора ЭДС воздушного зазора на мнимую ось. т.е. определить Eoq.v
-начиная с указанного момента времени, определяем проекцию вектора ЭДС,
связанную с потокосцеплением ротора в неподвижной системе координат, т.е. определяем EH2q:
-определяем интервал времени, за который вектор EH2q повернется на угол Дт.е.
достигнет значения E0q;
-определяем число импульсов, которые поступают в счетчик за указанный интервал времени;
-измеренное число импульсов пропор- ционально скольжению. .
Устройство для определения асинхронного двигателя скольжения, работает следующим образом.
По жилам А,В,С напряжение подается к асинхронному двигателю. Фазные токи измеряются датчиком фазных токов 1, а фазные напряжения измеряются датчиком фазных напряжений 2, Сигналы С выхода
датчика фазных токов 1 подаются на вход нуль-органа 3, на вход блока определения действительной составляющей тока 5 и на вход блока определения мнимой составляющей тока 6. Сигналы с выхода датчика фазных напряжений 2 подаются на вход блока определения действительной составляющей напряжения 7 и на вход блока определения мнимой составляющей напряжения 8. В блоке 5 по фазным токам фаз А,В и С
формируется сигнал id (проекция результирующего фактора тока на действительную ось), а в блоке 6 по фазным токам фаз В и С формируется сигнал iq (проекция результирующего вектора тока на мнимую ось). В
блоке 7 по фазным напряжением фаз А,В,С формируется сигнал Ud (проекция результирующего вектора напряжения на действительную ось), а в блоке 8 по фазным напряжением фаз В и С формируется сигнал Еч (проекция результирующего вектора напряжения на мнимую ось).
Выходные сигналы датчика фазных токов I фаз В и С подаются на нуль-орган 3. В момент перехода линейного тока IBC через нуль на выходе нуль-органа 3 появляется сигнал, который на время, равное переходу или нескольким периодам, открывает ключ 4 и импульсы, кратные частоте питания дви- гателя, начинают поступать на выходы блока преобразования координат тока 9, блока преобразования координат напряжения 10, блока умножения 11, счетчика 17 и формирователя импульсов 18. Так как ключ 4 от- крывается, когда линейный ток фаз В и С проходит через нуль, то осуществляется синхронизация работы устройства с положением вращающегося вектора тока. Для повышения точности синхронизации и для повышения точности определения скольжения частота импульсов, поступающих на ключ 4, должна значительно (два-три порядка) превосходить частоту, подаваемую на двигатель. Так как блоки преобразования координат относительно просто выполнять на функциях Уолша, то между частотой питания двигателя f и частотой fg, подаваемой на ключ 4, целесообразно выполнять соотношение
f-v(32-102-32-103)fg
На первый вход блоков 0 и 10 подается последовательность импульсов, а на второй вход блоков 9 и 10 подаются сигналы, определяющие проекцию результирующего век- тора на действительную ось (на второй вход блока 9 подается сигнал Id, а на второй вход блока 10 подается сигнал Ud), а на третий вход блоков 9 и 10 подаются соответствующие сигналы, определяющие проекцию ре- зультирующего вектора на мнимую ось (блок 9 .- сигнал Iq, блок 10 - сигнал Uq). В блоках 9 и 10 осуществляется переход к вращающейся системе координат согласно преобразованию Парка.
Блок 9 осуществляет переход во вращающуюся систему координат вектора тока. Так как переход осуществляется тогда, когда вектор тока совпадает с действи- тельной осью, то блок 9 имеет один выход, т.е. I id I. Блок 10 осуществляет переход вектора напряжения во вращающуюся систему координат при произвольном положении вектора напряжения и поэтому
блок 10 имеет два выхода: Udo и U40. Однако в дальнейшем мы используем только один выход - Uqo.
Сигнал с выхода блока 9 преобразозз ния координат тока подается на один -лз входов блока умножения 11, второй вход которого подключен к выходу ключа 4. Таким образом, на выходе блока умножения 11 появляется сигнал I а). Далее этот сигнал подается- на входы масштабных усилителей 12 и 13. В масштабном усилителе 12 сигнал I (оумножается на Lis (индуктивность рассеяния статора), а в масштабном усилителе 13 сигнал I а) умножается на L I (переходная индуктивность статора).
Выход блока преобразования координат напряжения 10 подается на один из . входов вычитателя 14, на второй вход которого подается сигнал I wLis. Таким образом, на выходе вычитателя появится сигнал E0q Uq - I a) I is. Следует отметить, что сигнал E0q в стационарном режиме - постоянная величина, так как он определен во вращающейся системе координат.
Выход .блока 8 определяет мнимую составляющую напряжения в неподвижной системе координат. Обозначим ее UHq. Сигнал, пропорциональный UHq подается на один из входов вычитателя 15, на второй вход которого подается сигнал I (i)L1;. Таким образом, на выходе вычитателя 15 появляется сигнал EH2q Uq -1 , первая составляющая которого изменяется во времени, а вторая составляющая в стационарном режиме постоянная величина.
Так как сопротивление L.S Us. то всегда в момент включения составляющая E0q будет больше составляющей EH2q, т.е. Eoq EH2q. Но так как составляющая E0q определена во вращающейся системе координат, а составляющая EH2q в неподвижной системе координат и вектор Еа вращается против часовой стрелки, то составляющая EH2q (выход вычитателя 15) будет-расти во времени. Выполнение равенства E0q Еь% будет свидетельствовать о том, что вектор Еа. изображенный на фиг.2 в момент срабатывания нуль-органа 3, повернулся на угол j3 и нуль-органа 16 перешел е другое состояние. При выполнении неравенства Eoq EH2q нуль-орган 16 находится водном состоянии, а при выполнении неравенства EH2q Eoq нуль-орган 16 находится в другом состоянии.
Таким образом, в момент появления сигнала на выходе нуль-органа на выхода формирователя 18 появляется сигнал, по которому счетчик 17 обнуляется, а нуль-орган
16 начинает сравнивать два сигнала E0q и EH2q. Причем в момент появления импульса на выходе нуль-органа выполняется неравенство Eoq EH2q и на вы ход е I нуль-органа 16 появляется сигнал, дающий разрешение счетчику 17 на счет импульсов. По мере течения времени вектор напряжения поворачивает и растет составляющая Uq, a следовательно, и EH2q. При выполнении равенства Eoq EH2q появляется сигнал на выходе 2 нуль-органа 16, который выдает сигнал запрета на счет импульсов, а принятое счетчиком количество импульсов, пропорциональное скольжению, хранится в счетчике до прихода следующего опробй- рующего импульса с выхода формирователя 18.
Так как нуль-орган 3 может открывать ключ на время, равное одному периоду, то скольжение определяется один раз за период. Причем оно определяется для момента времени, когда результирующий вектор совпадает с действительной осью.
Таким образом, устройство позволяет определить скольжение асинхронного двигателя без применения тахогенерато- ра на основе анализа электромагнитных процессов. Причем для определения скольжения нет необходимости применять сложные блоки деления и функциональные преобразователи, а необходимо осуществить счет импульсов за определенный период времени. Это упрощает устройство и повышает точность определения скольжения. Поэтому предлагаемое устройство может быть использовано в системах управления асинхронным приводом, что дает возможность без применения тахогенератора построить качественную систему регулирования.
Формула изобретения Устройство для определения скольжения асинхронного двигателя, содержащее датчик фазных токов, датчик фазных напряжений, нуль-орган, управляемый ключ, блоки определения действительной и мнимой составляющих тока и напряжения, блоки преобразования координат тока и напряжения с тремя входами каждый, блок умножения, первый и второй масштабный усилитель и вычитатель, при этом первые два выхода датчика фазных токов подключены к соответствующим входам блоков определения действительной и мнимой составляющих фазных токов и к входам нуль-органа, соединенного выходом с управляющим входом управляемого ключа, коммутирующий вход которого предназначен для подачи управляющих импульсов, а выход управляемого ключа подключен к
первым входам блоков преобразования координат тока и напряжения и к одному из входов блока умножения, третий выход датчика фазных токов соединен со вторым входом блока определения действительной
составляющей тока, выход которого соединен со вторым входом блока преобразования координат тока, а выход блока определения мнимой составляющей тока соединен с третьим входом блока преобразования координат тока, первые два выхода датчика фазных напряжения подключены к соответствующим входам блоков определения действительной и мнимой составляющей напряжения, а третий выход датчика
фазных напряжений соединен с третьим входом блока определения действительной составляющей напряжения, выход которого соединен со вторым входом блока преобразования координат напряжения, а выход
блока определения мнимой составляющей напряжения соединен с третьим входом блока преобразования координат напряжения, выход которого соединен с одним из входов вычитателя, второй вход которого соединен с выходом первого масштабного усилителя, выход блока преобразования координат тока соединен со вторым входом блока умножения, выход которого соединен со входами первого и второго масштабных
усилителей, отличаю щ.е е с я тем, что, с целью упрощения и повышения точности, в него введены дополнительные вычитатель и нуль-орган, счетчик на четыре входа и формирователь импульсов, причем выход блока
определения мнимой составляющей напряжения соединен с одним из входов дополнительного вычитателя, второй вход которого соединен с выходом второго масштабного усилителя, а выход дополнительного вычи
тателя соединен с первым входом дополнительного нуль-органа, второй вход которого соединен с выходом основного вычитателя, два выхода дополнительного нуль-органа соединены соответственно с первыми двумя управляющими входами счетчика, третий управляющий вход которого через формирователь импульсов соединен с управляющим входом управляемого ключа, а выход управляемого ключа соединен со счетным
входом счетчика, выход которого образует выход устройства для определения скольжения асинхронного двигателя.
Ш ШШ UJi-Ј
фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения скольжения асинхронного двигателя | 1988 |
|
SU1525583A1 |
| Устройство для определения скольжения асинхронного двигателя | 1987 |
|
SU1429037A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| Устройство для определения скольжения асинхронного двигателя | 1986 |
|
SU1415399A1 |
| Частотно-регулируемый электропривод | 1991 |
|
SU1823125A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Устройство для измерения пульсаций момента асинхронных двигателей | 1988 |
|
SU1606882A1 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |
Изобретение относится к электротехнике, а именно к системам управления частотно-регулируемыми асинхронными двигателями. Целью изобретения является упрощение устройства и повышение точности определения скольжения. Указанная цель достигается тем, что в устройство для определения скольжения, содержащее датчик фазных токов 1, датчик фазных напряжений 2, нуль-орган 3, управляемый ключ 4, блоки 5,6 для определения действительной и мнимой составляющих напряжения, блоки 9, 10 преобразования координат тока и напряжения, блок умножения 11, масштабные усилители 12, 13, вычитатель 14, введены дополнительный вычитатель 15, нуль-орган 16, счетчик 17 и формирователь импульсов 18, При этом обеспечивается определение числа импульсов, поступающих в счетчик 17 за время поворота вектора ЭДС, связанного с потокосцеплением в неподвижной системе координат до положения, занимаемого вектором ЭДС воздушного зазора, что пропорционально скольжению. В сравнении с известными решениями устройство реализуется более простыми техническими средствами при повышении точности. 2 ил. I С
Фиг. 2
| Устройство для измерения скольжения асинхронных электродвигателей | 1983 |
|
SU1140043A2 |
| Устройство для определения скольжения асинхронного двигателя | 1988 |
|
SU1525583A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
