Заявляемое изобретение относится к упаковочной технике и может быть использовано в различных отраслях промышленности при формировании групповых пакетов изделий, обвязке картонных коробок, рулонов бумаги, обоев, тюков и т.п.
Известно ручное устройство для обвязывания предметов пластиковой лентой, содержащее опорную площадку и установленные в корпусе прижимной, отрезной и натяжной механизмы, каждый из которых снабжен рабочей рукояткой и кинематическим звеном (см. патент США №5181546, опубл. 26.01.93 г., М. кл. В 21 F 9/02).
Недостатком данного устройства для обвязывания предметов пластиковой лентой является низкая надежность конструкции, обусловленная наличием трех рабочих рукояток и трех кинематических звеньев для приведения в действие соответственно прижимного, натяжного и отрезного механизмов, что приводит к образованию большого количества пар скольжения в кинематических звеньях и повышенному износу трущихся поверхностей. Устройство также неудобно в эксплуатации, поскольку оператор, во-первых, вынужден манипулировать тремя рабочими рукоятками и, во-вторых, прикладывать значительные усилия для преодоления трения скольжения в каждом кинематическом звене. Вместе с тем, устройство имеет значительную длину опорной площадки корпуса, в связи с размещением вдоль нее прижимного, натяжного и отрезного механизмов, что ограничивает область применения данного устройства обвязкой только крупногабаритных предметов, имеющих внешнюю плоскую поверхность достаточной длины для размещения опорной площадки корпуса устройства.
Известно также ручное устройство для обвязывания предметов пластиковой лентой, принятое в качестве прототипа, содержащее опорную площадку и рабочую рукоятку, и установленные в корпусе прижимной механизм, отрезной механизм и натяжной механизм, кинематически связанные друг с другом (см. патент США №6047742, опубл. 11.04.00 г., М. кл. В 21 F 9/00).
Данное устройство, по сравнению с аналогом, более удобно в эксплуатации, имеет меньшие габариты и более простую конструкцию, так как содержит одну рабочую рукоятку, которая кинематически связана с установленными в корпусе прижимным, отрезным и натяжным механизмами. При этом кинематическая связь выполнена в виде продольной тяги с тремя расположенными последовательно в ряд один за другим пазами, в которых размещены оси, закрепленные в прижимном, натяжном и отрезном механизмах соответственно, а упомянутые механизмы установлены в корпусе также последовательно в ряд один за другим. Такое выполнение кинематической связи в виде продольной тяги с пазами, в которых размещены оси прижимного, натяжного и отрезного механизмов, связано с образованием нескольких пар скольжения в прижимном, натяжном и отрезном механизмах, что приводит к неудобству пользования устройством, в связи с необходимостью приложения значительных усилий для преодоления трения в каждой паре скольжения. В парах скольжения наблюдается повышенный износ трущихся поверхностей, вследствие чего известное устройство быстро выходит из строя. Расположение рабочих механизмов последовательно в ряд один за другим приводит к увеличению длины опорной площадки корпуса, что ограничивает область применения данного устройства обвязкой только крупногабаритных предметов, имеющих внешнюю плоскую поверхность достаточной длины для размещения опорной площадки корпуса устройства. В частности, известное устройство практически не пригодно для обвязки цилиндрических предметов небольшого диаметра (рулонов обоев, рубероида, линолеума и т.п.). Это объясняется тем, что после обвязки, натяжения и скрепления концов ленты и вывода из-под нее ручного устройства для обвязывания предметов на полученной петле образуется "слабина" и лента провисает, т.е. не обеспечивается необходимое натяжение ленты. Величина образующегося провисания тем больше, чем больше длина опорной площадки корпуса устройства и чем меньше диаметр упаковываемого предмета.
Задачей настоящего изобретения является создание удобного и надежного ручного устройства для обвязывания предметов пластиковой лентой, позволяющего упаковывать с достаточной степенью натяжения ленты предметы небольших диаметров, за счет оптимального выполнения кинематической связи между механизмами устройства.
Для решения поставленной задачи в известном ручном устройстве для обвязывания предметов пластмассовой лентой, содержащем опорную площадку и рабочую рукоятку с установленными в корпусе прижимным механизмом, отрезным механизмом и натяжным механизмом, кинематически связанными друг с другом, согласно изобретению кинематическая связь выполнена в виде установленного на валу прижимного механизма одноступенчатого кулачка и установленного на валу отрезного механизма двухступенчатого кулачка с двумя толкателями, один из которых примыкает к рабочей поверхности одноступенчатого кулачка, а другой через рабочую рукоятку соединен с натяжным механизмом.
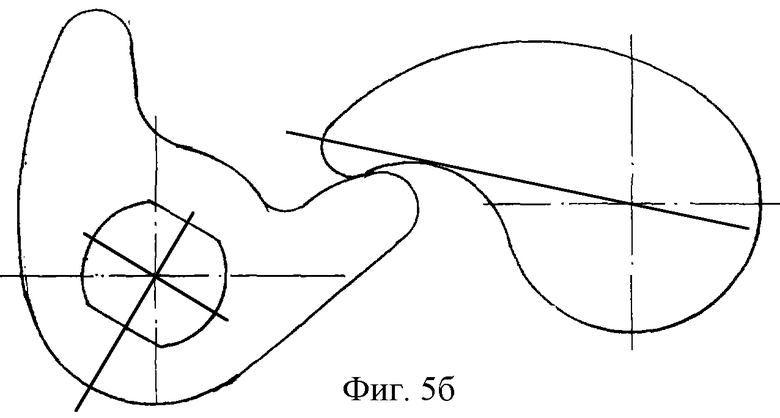
В частном случае исполнения одноступенчатый кулачок снабжен квазисинусоидальным зацепом, рабочая поверхность которого выполнена в виде обращенной внутрь профиля кулачка цилиндрической поверхности, а рабочий профиль толкателя двухступенчатого кулачка, примыкающего к ней, образован циклоидой, в соответствии со следующей зависимостью:
1,25<R/r<3,5, где
R - радиус рабочей поверхности квазисинусоидального зацепа, мм;
r - радиус производящей окружности, образующей циклоиду, мм.
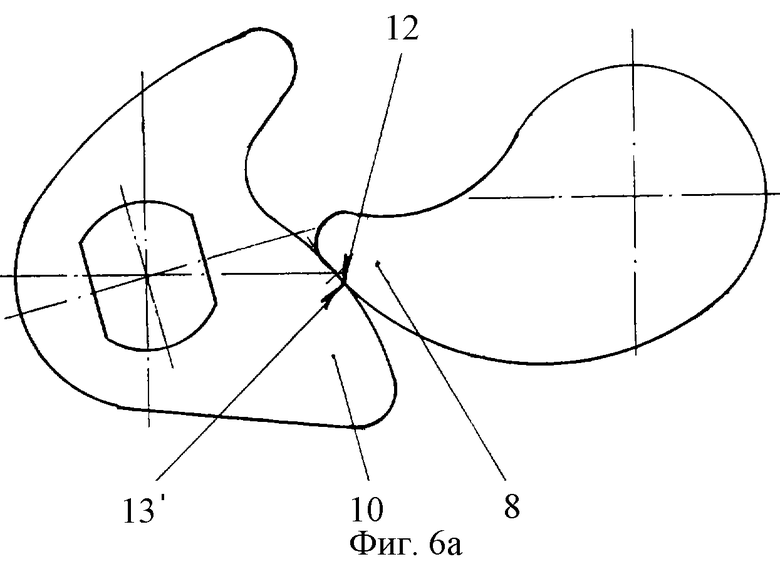
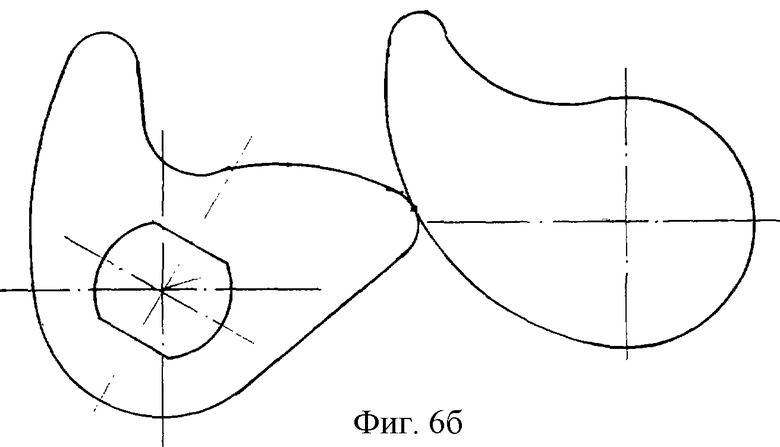
В ином варианте исполнения профиль рабочей поверхности одноступенчатого кулачка и рабочий профиль толкателя двухступенчатого кулачка, примыкающего к ней, выполнены в виде участка архимедовой спирали.
Такое выполнение кинематической связи позволяет расположить в корпусе устройства натяжной механизм над прижимным и отрезным механизмами, а не в один ряд с ними. Это значительно уменьшает длину опорной площадки корпуса устройства и позволяет ликвидировать провисание и ослабление натяжения ленты после вывода из-под нее устройства при обвязке цилиндрических предметов небольшого диаметра. Расширяются технологические возможности устройства, которое обеспечивает надежную обвязку как крупногабаритных, так и мелкогабаритных предметов с незначительной длиной внешней поверхности, пригодной для размещения опорной площадки корпуса устройства. Выполнение рабочей поверхности квазисинусоидального зацепа в виде обращенной внутрь профиля кулачка цилиндрической поверхности, которая взаимодействует в процессе эксплуатации с рабочим профилем толкателя двухступенчатого кулачка, образованным циклоидой, позволяет обеспечить в этой кинематической паре трение качения на заранее выбранном участке хода рабочей рукоятки и тем самым уменьшить усилие, прикладываемое оператором к рукоятке устройства в момент перерезания пластиковой ленты. В частном варианте выполнения профиль рабочей поверхности одноступенчатого кулачка и рабочий профиль толкателя двухступенчатого кулачка, примыкающего к ней, выполнены в виде участка архимедовой спирали, что также позволяет обеспечить в этой кинематической паре трение качения на заранее выбранном участке хода рабочей рукоятки. Вместе с тем, вышеуказанное расположение натяжного, прижимного и отрезного механизмов привело к такому изменению соотношения плеч рабочей рукоятки, которое позволило уменьшить усилие, прикладываемое оператором к рукоятке устройства в момент перерезания пластиковой ленты на 30%.
Проведенный поиск по патентной и научно-технической литературе не выявил технический решений, характеризующихся сходной или тождественной совокупностью существенных признаков, что позволяет сделать вывод о соответствии предложенного технического решения критериям новизны и изобретательского уровня.
В то же время, предложенное техническое решение реализовано в производственных условиях заявителя, что подтверждает его промышленную применимость.
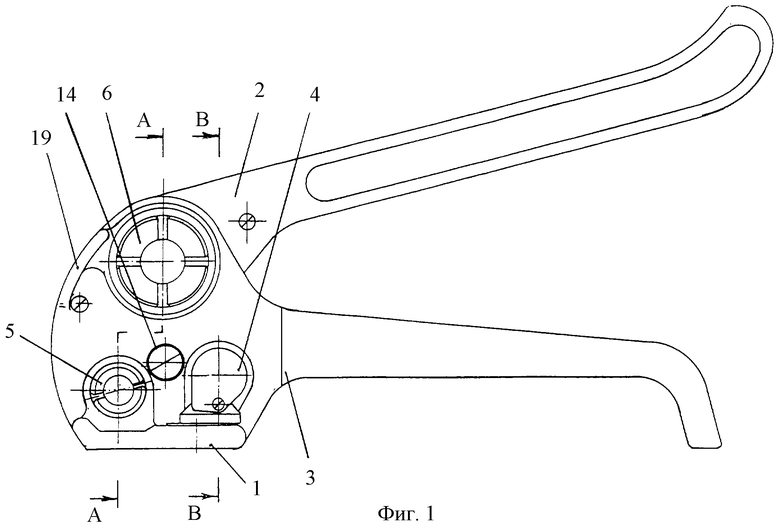
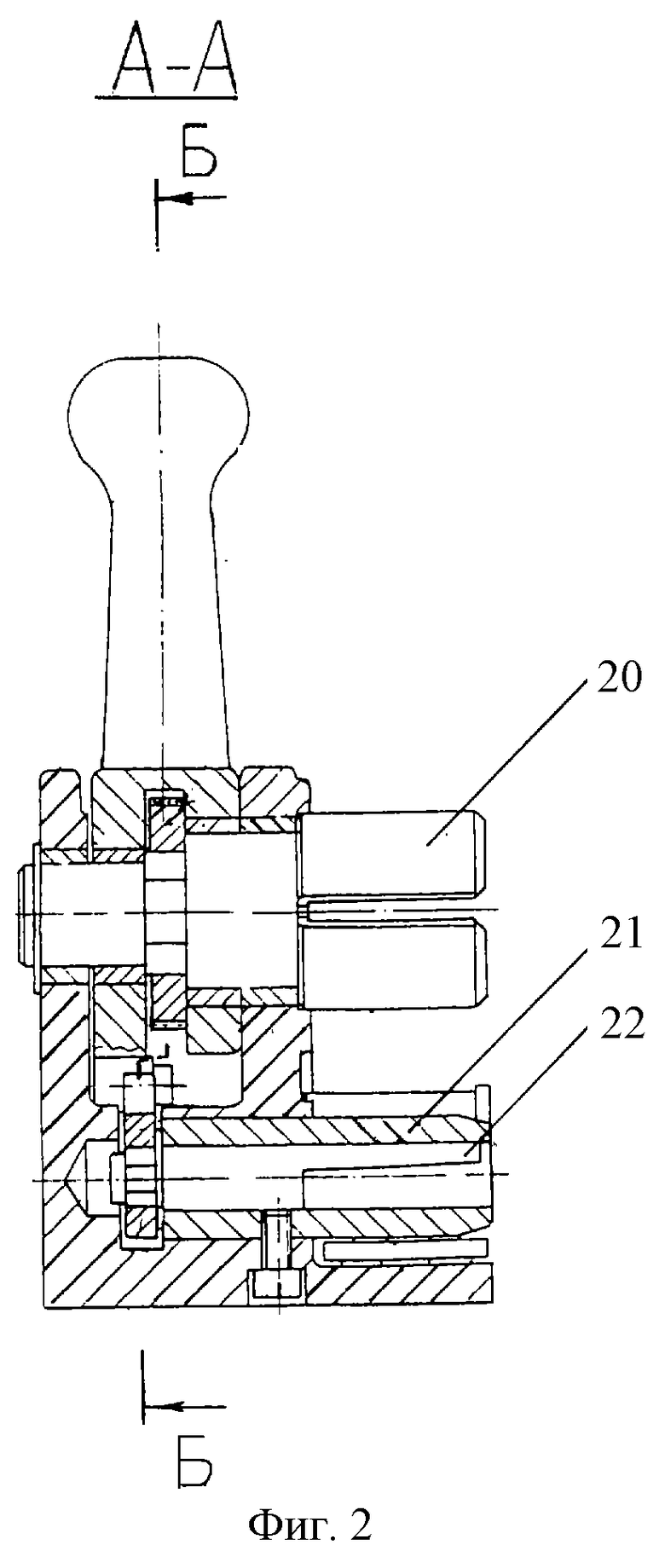
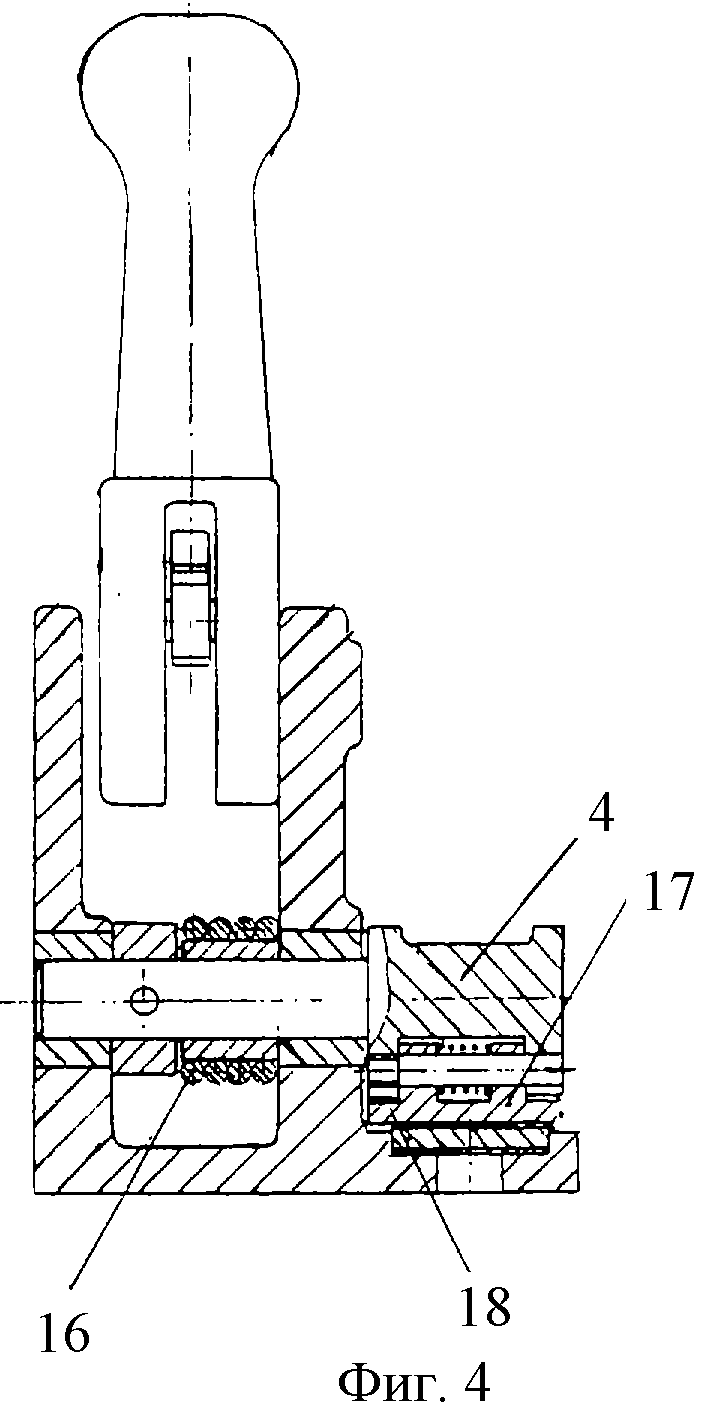
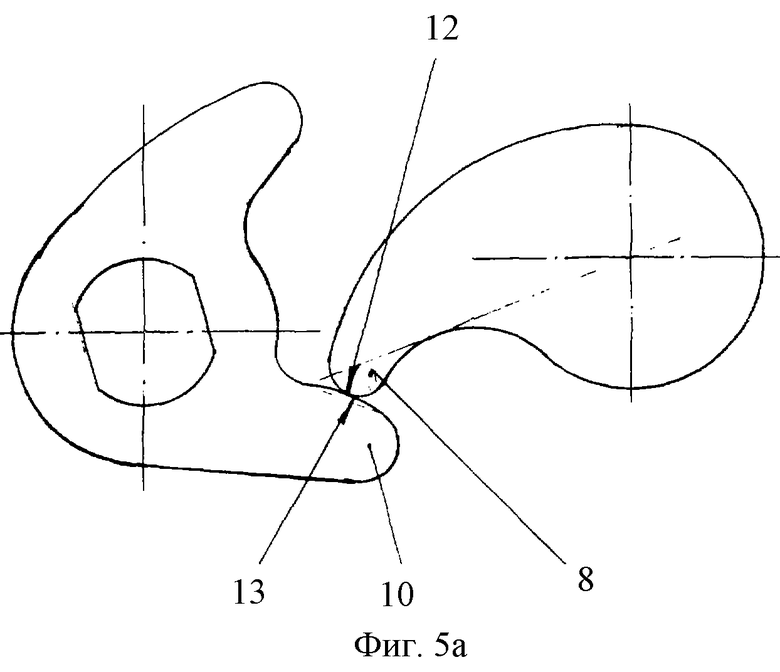
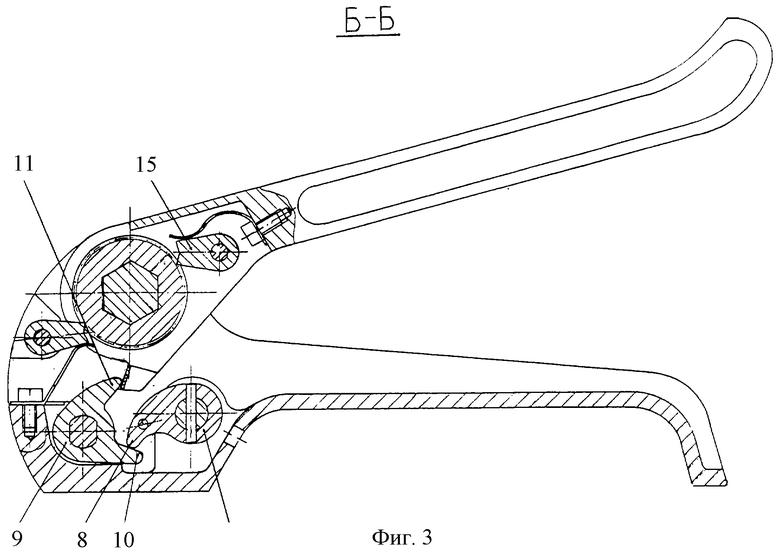
Сущность предложенного изобретения поясняется чертежами, где на фиг.1 изображен общий вид предлагаемого устройства; на фиг.2 -сечение А-А фиг.1; на фиг.3 - сечение Б-Б фиг.2; на фиг.4 - сечение В-В фиг.1; на фиг.5а, 5б - схемы кинематического взаимодействия кулачков в исходном и конечном положениях, соответственно; на фиг.6а, 6б - схемы кинематического взаимодействия кулачков, выполненных в виде участка архимедовой спирали, в исходном и конечном положениях соответственно.
Устройство содержит опорную площадку 1, рабочую рукоятку 2 и установленные в корпусе 3 прижимной механизм 4, отрезной механизм 5 и натяжной механизм 6, кинематически связанные друг с другом. Кинематическая связь выполнена в виде установленного на валу прижимного механизма 4 одноступенчатого кулачка 7 с квазисинусоидальным зацепом 8 и установленного на валу отрезного механизма 5 двухступенчатого кулачка 9 с толкателями 10, 11. Двухступенчатый кулачок 9 посредством толкателя 10 взаимодействует с одноступенчатым кулачком 7, а другим толкателем 11 через рабочую рукоятку 2 связан с натяжным механизмом 6. Рабочая поверхность 12 квазисинусоидального зацепа 8 одноступенчатого кулачка 7, примыкающая к толкателю 10, выполнена в виде обращенной внутрь профиля кулачка 7 цилиндрической поверхности, а рабочий профиль 13 толкателя 10 двухступенчатого кулачка 9 образован циклоидой, в соответствии со следующей зависимостью:
1,25<R/r<3,5, где
R - радиус рабочей поверхности 12 квазисинусоидального зацепа 8, мм;
r - радиус производящей окружности, образующей циклоиду, мм.
В частном варианте исполнения (см. фиг.6) профиль рабочей поверхности 12' одноступенчатого кулачка 7 и рабочий профиль 13' толкателя двухступенчатого кулачка 9, примыкающего к ней, выполнены в виде участка архимедовой спирали. На корпусе 3 установлен отклоняющий ролик 14. Натяжной механизм 6 снабжен храповым механизмом 15. Прижимной механизм 4 снабжен пружиной 16, подвижным зажимом 17 и неподвижной пятой 18, установленной в основании корпуса 3. Корпус 3 снабжен приливом в виде козырька 19, расположенного над барабаном 20 натяжного механизма 6. Отрезной механизм 4 выполнен в виде разрезной втулки 21, внутри которой установлен нож 22.
Устройство работает следующим образом. Для выполнения операции обвязывания предметов пластиковой лентой устройство устанавливают в рабочее положение таким образом, чтобы опорная площадка 1 примыкала к внешней поверхности упаковываемого предмета. Затем по часовой стрелке (см. фиг.1) поворачивают рабочую рукоятку 2 относительно корпуса 3, при этом рукоятка 2 воздействует на толкатель 11 двухступенчатого кулачка 9 отрезного механизма 5 и поворачивает кулачок 9 против часовой стрелки. Двухступенчатый кулачок 9, взаимодействуя своим толкателем 10 с одноступенчатым кулачком 7, поворачивает последний, как показано на фиг.3, по часовой стрелке. Прижимной механизм 4, преодолевая усилие пружины 16, приподнимает на заданную величину подвижный зажим 17 над установленной в основании корпуса 3 неподвижной пятой 18. В образовавшийся зазор между зажимом 17 и пятой 18 вводят ленту, свободный конец которой заводят пол отрезной механизм 5. После этого рабочую рукоятку 2 отпускают и под действием пружины 16 прижимной механизм 4 фиксирует ленту между подвижным зажимом 17 и неподвижной пятом 18. Затем ленту обматывают вокруг упаковываемого предмета и второй свободный конец ленты пропускают через разрезную втулку 21 и нож 22 отрезного механизма 5, обводят под отклоняющим роликом 14 и вставляют в один из пазов барабана 20 натяжного механизма 6. Удерживая одной рукой корпус 3, другой рукой поворачивают рабочую рукоятку 2 против часовой стрелки ("от себя") и обратно. Храповой механизм 15 при этом удерживает барабан 20 от обратного проворачивания. Это движение повторяют несколько раз до достижения требуемого натяжения ленты. Свободный конец ленты при этом упирается в козырек 19 и, таким образом, занимает положение, не препятствующее выполнению оператором операции по скреплению ленты. Затем осуществляют скрепление свободных концов ленты при помощи специального приспособления (на чертежах не показано). После этого рабочую рукоятку 2 поворачивают по часовой стрелке до упора (в нижнее положение), при этом посредством толкателя 11 вращение передается двухступенчатому кулачку 9, который поворачивает нож 22 относительно разрезной втулки 21, вследствие чего происходит отрезание ленты. Одновременно с этим двухступенчатый кулачок 9 толкателем 10 воздействует на квазисинусоидальный зацеп 8 одноступенчатого кулачка 7, который приподнимает подвижный зажим 17 над неподвижной пятой 18 и освобождает ленту. Перемещение рабочего профиля 13 толкателя 10, образованного циклоидой, по рабочей цилиндрической поверхности 12 квазисинусоидального зацепа 8 позволяет обеспечить в этой кинематической паре трение качения на заранее выбранном участке хода рабочей рукоятки 2 и, тем самым, уменьшить усилие, прикладываемое оператором к рукоятке 2 устройства. В частном варианте исполнения профиль рабочей поверхности 121 одноступенчатого кулачка 7 и рабочий профиль 131 толкателя 10 двухступенчатого кулачка 9, примыкающего к ней, выполнены в виде участка архимедовой спирали, что также позволяет обеспечить в этой кинематической паре трение качения на заранее выбранном участке хода рабочей рукоятки 2. Это позволяет повысить удобство эксплуатации и надежность заявляемого устройства.
Затем устройство смещают в сторону и выводят из-под ленты. После выведения устройства из рабочего положения в результате уменьшенной длины опорной площадки 1 не наблюдается провисания ленты, что обеспечивает надежность обвязки упаковываемого предмета.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЕ УСТРОЙСТВО ДЛЯ ОБВЯЗЫВАНИЯ ПРЕДМЕТОВ МЕТАЛЛИЧЕСКОЙ ЛЕНТОЙ | 1999 |
|
RU2176212C2 |
| РУЧНОЕ УСТРОЙСТВО ДЛЯ ОБВЯЗЫВАНИЯ ПРЕДМЕТОВ МЕТАЛЛИЧЕСКОЙ ЛЕНТОЙ | 2003 |
|
RU2257313C1 |
| Устройство для обвязывания предметов лентой | 1990 |
|
SU1717487A1 |
| Устройство для обвязывания предметов | 1989 |
|
SU1654136A2 |
| Устройство для обвязывания грузов металлической лентой | 1990 |
|
SU1747320A1 |
| Устройство для соединения концов обвязочного материала | 1982 |
|
SU1076359A1 |
| ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ ПРОВОЛОКИ | 2001 |
|
RU2203753C2 |
| Устройство для обвязки предметов | 1984 |
|
SU1169886A1 |
| Устройство для обвязывания предметов лентой | 1990 |
|
SU1757961A1 |
| УСТРОЙСТВО И СПОСОБ НАЛОЖЕНИЯ ЛЕНТЫ ВОКРУГ СВЯЗКИ ПРЕДМЕТОВ | 2008 |
|
RU2454359C2 |
Устройство предназначено для использования в упаковочной технике и содержит опорную площадку и рабочую рукоятку с установленными в корпусе прижимным механизмом, отрезным механизмом и натяжным механизмом, кинематически связанными друг с другом. Кинематическая связь выполнена в виде установленного на валу прижимного механизма одноступенчатого кулачка 7 и установленного на валу отрезного механизма двухступенчатого кулачка 9 с двумя толкателями 10, 11. Толкатель 10 связан с зацепом 8, а толкатель 11 через рабочую рукоятку соединен с натяжным механизмом. В одном варианте исполнения одноступенчатый кулачок 7 снабжен квазисинусоидальным зацепом, рабочая поверхность которого выполнена в виде обращенной внутрь профиля кулачка 7 цилиндрической поверхности, а рабочий профиль толкателя 10 двухступенчатого кулачка 9, примыкающего к ней, образован циклоидой, в соответствии со следующей зависимостью: 1,25<R/r<3,5, где R - радиус рабочей поверхности 12 зацепа 8, мм; r - радиус производящей окружности, образующей циклоиду, мм. В ином варианте исполнения профиль рабочей поверхности одноступенчатого кулачка 7 и рабочий профиль толкателя двухступенчатого кулачка 9, примыкающего к ней, выполнены в виде участка архимедовой спирали. Устройство надежно и удобно в эксплуатации, позволяет упаковывать с достаточной степенью натяжения ленты цилиндрические предметы небольшого диаметра. 2 з.п. ф-лы, 8 ил.
1,25<R/r<3,5,
где R - радиус рабочей поверхности зацепа, мм;
r - радиус производящей окружности, образующей циклоиду, мм.
| US 6047742 А, 11.04.2000 | |||
| US 5181546 А, 26.01.1993 | |||
| US 4252158 А, 24.02.1981. |

