Предлагаемое изобретение относится к области электродуговой сварки, а именно к маятниковым датчикам пространственного положения сварочной ванны с целью удержания в ней расплавленного металла, и может найти применение для сварки неповоротных трубопроводных стыков, расположенных в вертикальной плоскости.
Известно устройство - маятниковый датчик угла наклона (Авторское свидетельство СССР №1776992, кл. G 01 С 9/12, БИ №43, 1992 г.), содержащее: поперечный стержень; первый и второй боковые стержни, одна сторона каждого из которых выполнена с зубчатой рейкой, установленной с возможностью взаимодействия с первым зубчатым колесом, расположенным на оси подвеса; первый индукционный преобразователь наклона, статор которого жестко закреплен на оси подвеса, а ротор жестко скреплен с первым зубчатым колесом; второй индукционный преобразователь наклона с ротором, закрепленным соосно с первым ротором на втором зубчатом колесе, взаимодействующем с дополнительной зубчатой рейкой, закрепленной на одном из боковых стержней, при этом обмотки обоих роторов соединены последовательно и согласно.
Данный маятниковый датчик обладает недостатком, заключающимся в том, что маятник имеет сложную конструкцию, требующую сложного оборудования для изготовления зубчатых реек и зубчатых колес и специальной производственной базы для реализации конструкции индукционного преобразователя. Кроме того, еще одним недостатком, не позволяющим использовать данный датчик непосредственно для управления углом наклона сварочной головки, является то, что индукционный преобразователь угла наклона в этом датчике преобразует угол наклона в прямо пропорциональный ему сигнал.
Прототипом является устройство для определения углов наклона объектов (Авторское свидетельство СССР №1760318, кл. G 01 С 9/12, БИ №33, 1992 г.), содержащее неподвижный корпус, гравитационно-чувствительный элемент, закрепленный на горизонтальной оси вращения, связанной с преобразователем угла поворота, груз и поплавок, связанные с чувствительным элементом симметрично относительно оси вращения.
В данном устройстве угол наклона преобразуется в прямо пропорциональную ему величину напряжения, что не позволяет использовать это напряжение для управления углом наклона сварочной головки в функции пространственного положения сварочной ванны, так как связь между углом положения сварочной головки и пространственным положением сварочной ванны, определяемым углом между вертикалью и нормалью к свариваемой поверхности в центре сварочной ванны, является не прямо пропорциональной, а нелинейной. Кроме того, конструкция данного датчика сложна, ввиду чего он не может быть изготовлен без специального оборудования, требует специальных комплектующих материалов и т.д.
Поставлена задача разработать простой и надежный датчик, который позволял бы непрерывно фиксировать ориентацию сварочной ванны относительно линии действия силы тяжести (иначе говоря, фиксировать пространственное положение сварочной ванны) и преобразовывать пространственное положение в электрический сигнал, изменяющийся в соответствии с определенной функцией.
Поставленная задача решается тем, что функциональный датчик пространственного положения сварочной ванны содержит корпус, неподвижно закрепленный на механизме передвижения сварочной головки вдоль линии шва, и гравитационно-чувствительный элемент, выполненный в виде маятника, который закреплен на оси поворота преобразователя угла наклона в напряжение потенциометрического типа. К выходу преобразователя угла поворота в напряжение, которым являются средняя точка потенциометра и его движок, подключен делитель напряжения, состоящий из последовательно включенных сопротивления и трех параллельных цепей, одна из которых состоит из диода и регулируемого сопротивления. Вторая цепь состоит из диода и регулируемого сопротивления, причем диод в этой цепи включен встречно по отношению к диоду первой цепи. Третья цепь состоит из стабилитрона, регулируемого сопротивления и диода, причем диод третьей цепи включен в том же направлении, что и диод во второй цепи. Параллельно цепи, состоящей из трех параллельных цепей, подключена мостовая выпрямительная схема, с вывода которой снимется напряжение, представляющее закон управления углом наклона сварочной головки в функции пространственного положения сварочной ванны.
Более детально сущность изобретения поясняется чертежами, на которых изображено:
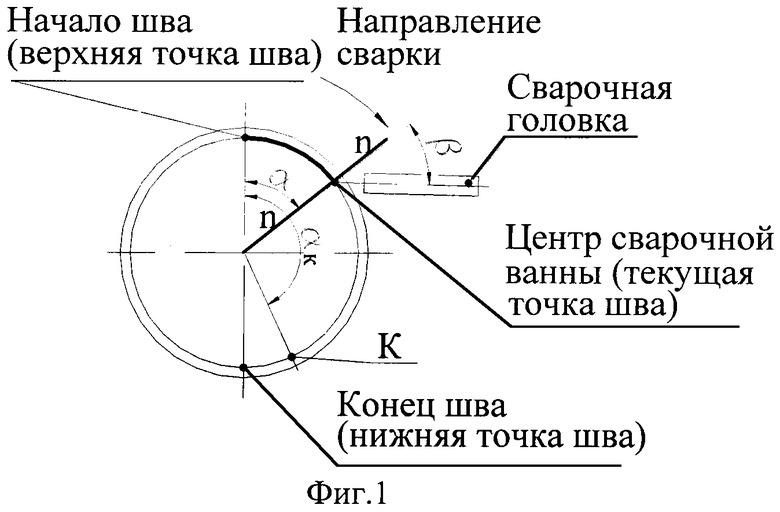
на фиг.1 - схема сварки;
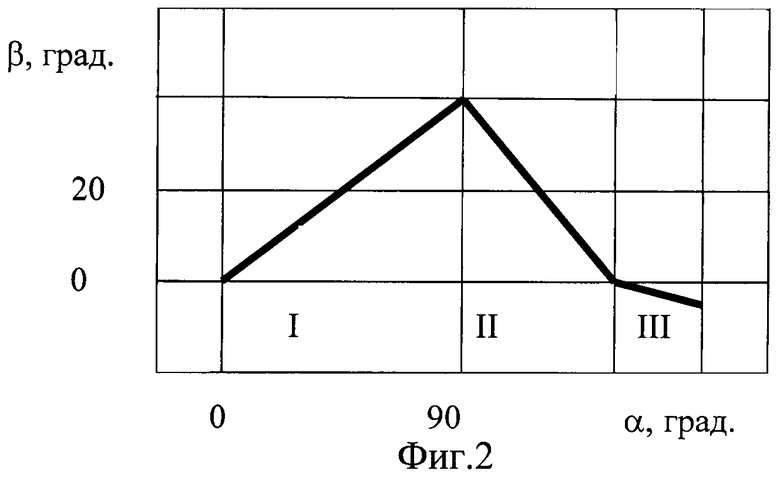
на фиг.2 - график зависимости угла наклона оси электрода от угла наклона нормали, проведенной к поверхности стыка через центр сварочной ванны;
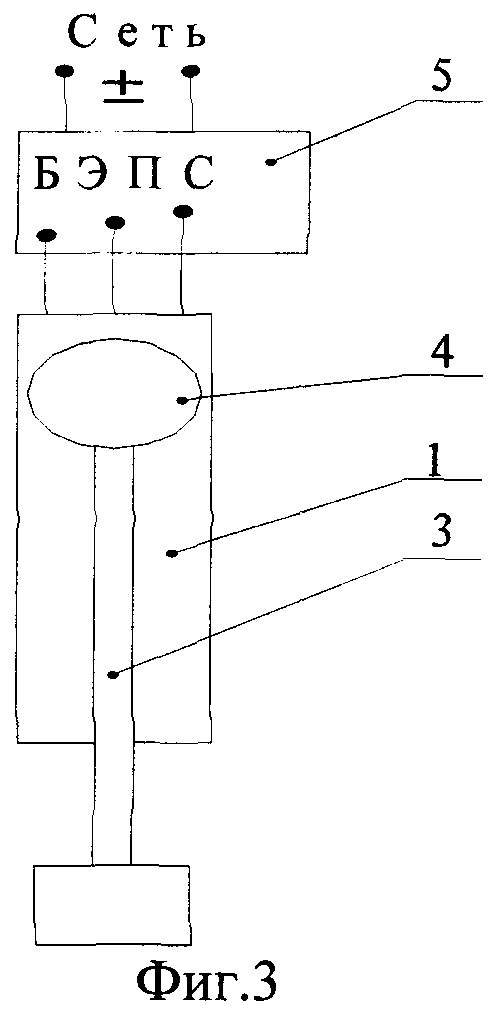
на фиг.3 - конструкция датчика (вид спереди);
на фиг.4 - конструкция датчика (вид сбоку);
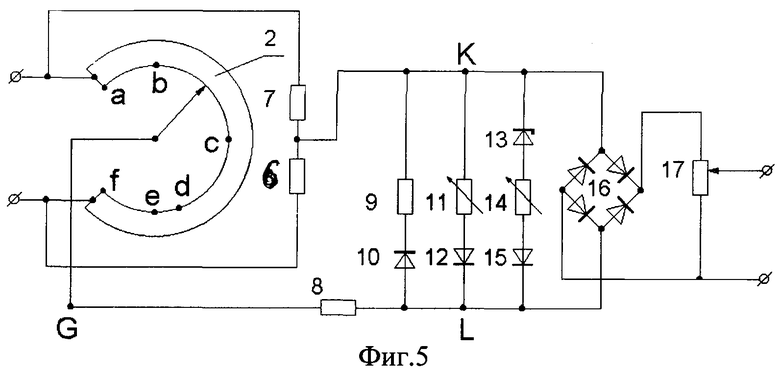
на фиг.5 - электрическая схема датчика;
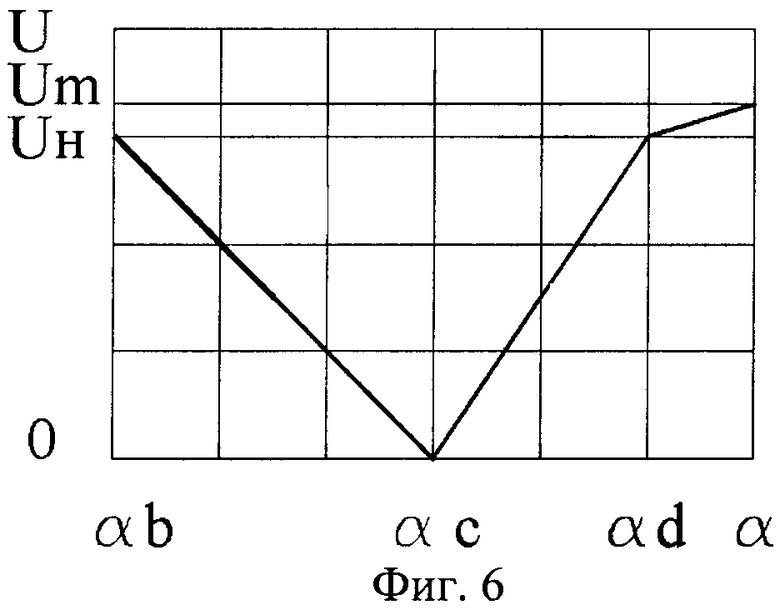
на фиг.6 - график, представляющий закон изменения угла наклона сварочной головки в функции пространственного положения сварочной ванны.
Далее необходимо пояснить следующее.
Современные исследования в области формирования сварного шва при дуговой сварке неповоротных орбитальных стыков, расположенных в вертикальной плоскости, показали, что при сварке “на спуск” необходимо корректировать угол β наклона оси электрода относительно нормали, проведенной к поверхности стыка через центр тяжести сварочной ванны в плоскости стыка. Согласно упомянутым исследованиям угол β наклона оси электрода необходимо изменять в зависимости от того, как в данный момент сварочная ванна ориентирована относительно линии действия силы тяжести. Указанное ориентирование шва выражается углом α наклона нормали (поведенной к поверхности стыка и проходящей через центр тяжести сварочной ванны) к вертикали (фиг.1). Определение пространственного положения сварочной ванны посредством датчика, установленного на механизме перемещения сварочной головки вдоль линии стыка (сварочной тележке), возможно благодаря тому, что сварочная ванна и сварочная тележка в пространстве жестко друг с другом связаны. Корректировка угла наклона оси электрода в плоскости стыка обеспечивает управление процессом формирования сварного шва, необходимое для удерживания сварочной ванны от вытекания. Согласно проведенным исследованиям одним из оптимальных вариантов зависимости β от α является зависимость, представленная на фиг.2. Эта зависимость состоит из трех характерных участков (I, II и III), на каждом из которых характер изменения β различен. Для того, чтобы осуществить управление углом β, как функцией угла α (в соответствии с представленной на фиг.2 зависимостью), необходимо получить сигнал, который изменялся бы в функции угла α и отражал бы при этом указанную зависимость.
Следовательно, чтобы качественно выполнить сварной шов, необходимо получить на выходе датчика требуемую функциональную зависимость напряжения от пространственного положения сварочной ванны при его непрерывном изменении, с целью использования этой зависимости для управления процессом сварки, обеспечивающим удерживание сварочной ванны от вытекания во всех пространственных положениях.
Датчик (фиг.3, 4) состоит из корпуса 1, служащего одновременно для закрепления датчика на механизме перемещения сварочной головки вдоль линии стыка; преобразователя угла поворота потенциометрического типа 2; гравитационно-чувствительного элемента 3, выполненного в виде маятника, закрепленного на оси преобразователя угла поворота с помощью крепежного устройства 4, а также блока электрического преобразования сигнала 5 (БЭПС). В состав БЭПС входит делитель напряжения, состоящий из двух последовательно включенных резисторов 6 и 7 (фиг.5), имеющих одинаковый номинал. Этот делитель включен последовательно преобразователю угла поворота 2. В состав БЭПС входит также делитель напряжения, состоящий из резистора 8 и трех параллельных цепей, первая из которых состоит из нерегулируемого сопротивления 9 и диода 10; вторая состоит из регулируемого сопротивления 11 и диода 12, причем диод второй цепи включен встречно по отношению к диоду первой цепи; третья цепь состоит из стабилитрона 13, регулируемого сопротивления 14 и диода 15, причем диод третьей цепи включен параллельно диоду второй цепи. Также в состав БЭПС входит выводное устройство, состоящее из выпрямительного блока 16 и потенциометра 17.
Устройство работает следующим образом.
В момент начала движения механизма изменения угла наклона сварочной головки, на котором закреплен корпус преобразователя угла поворота 2 (ПУП) датчика, движок ПУП находится в положении b, несколько отстоящем от крайнего положения а, к контакту которого подключен положительный вывод источника питания датчика. При движении механизма изменения угла наклона сварочной головки вдоль сварного стыка движок ПУП осуществляет перемещение от положения b, в котором центр сварочной ванны расположен в самой верхней точке сварного стыка, к положению е, в котором центр сварочной ванны распложен в самой нижней точке сварного стыка, отстоящему от положения b на 180°. Положение с движка ПУП отстоит от положения а на 90°. Когда движок ПУП находится в положении с, потенциалы контакта движка ПУП и общей точки сопротивлений 6 и 7 равны, а напряжение на выводном устройстве 17 блока 5 отсутствует.
Когда движок ПУП находится в положении d, напряжение на выходе БЭПС, обусловленное функцией самого БЭПС, равно напряжению, которое соответствует положению бегунка b.
При перемещении бегунка ПУП из положения b в положение с разность потенциалов между клеммами G и К монотонно убывает от U1 до U2=0, а клемма G является плюсом по отношению к клемме К. Так как клемма G является плюсом по отношению к клемме К, то ток через делитель, состоящий из сопротивления 8 и трех параллельных цепей, потечет по цепи: клемма G - сопротивление 8 - диод 10 - сопротивление 9 - клемма К, а напряжение на выводном устройстве, снимаемое с клемм L и К, будет пропорционально отношению сопротивлений R9/R8. При перемещении движка ПУП от положения с к положению d полярность на клеммах G и К поменяется и клемма К станет плюсовой по отношению к клемме G, при этом ток через делитель потечет по цепи: клемма К - сопротивление 11 - диод 12 - сопротивление 8 - клемма G, a напряжение на выводном устройстве, снимаемое с клемм К и L, будет пропорционально отношению сопротивлений R11/R8, при этом регулируемое сопротивление 11 настраивается таким образом, что отношение R11/R8 больше отношения R9/R8 ровно на столько, что напряжение на выводном устройстве, снимаемое с клемм К и L, будет соответствовать снимаемому с этих клемм напряжению в случае нахождения бегунка ПУП в положении b. Положение точки d, при котором достигается вышеуказанное равенство напряжений, не является постоянным, а может быть установлено в любом месте между точками с и е, исключая крайние положения, посредством изменения сопротивлений 11 и 14.
При достижении бегунком ПУП положения d открывается стабилитрон 13, имеющий соответствующее напряжение стабилизации, в результате чего ток начинает течь по двум параллельным цепям:
1. клемма К - сопротивление 11 - диод 12 - клемма L - сопротивление 8 -клемма G;
2. клемма К - стабилитрон 13 - сопротивление 14 - диод 15 - клемма L -сопротивление 8 - клемма G.
В это время напряжение на выводном устройстве, снимаемое с клемм К и L, будет пропорционально отношению суммарного сопротивления цепей, одна их которых состоит из сопротивления 11 и диода 12, а другая - из стабилитрона 13, сопротивления 14 и диода 15, к сопротивлению 8 (фиг.5).
На фиг.6 изображен график, выражающий требуемый закон изменения напряжения на выходе со стороны потенциометра 17 (при неизменном значении входного постоянного напряжения на входе со стороны потенциометра 2), в зависимости от положения бегунка потенциометра 2.
В соответствие с описанием работы принципиальной электрической схемы при движении бегунка потенциометра из положения b в положение с (фиг.5) напряжение на выходе со стороны потенциометра 17 падает от начального значения uн до нуля в соответствии с участком αb-αс графика (фиг.6). Далее при движении бегунка потенциометра 2 от точки с к точке d напряжение на выходе со стороны потенциометра 2 растет от нуля до начального значения uн и, далее, при движении бегунка потенциометра 2 от точки d к точке е - до своего максимального значения.
Таким образом, в процессе работы датчика, при определении им непрерывно меняющегося пространственного положения, электрический сигнал на выходе БЭПС датчика меняется по закону, представленному на фиг.6. А так как зависимость, представленная на фиг.6, в сущности вполне полноценно отражает зависимость, представленную на фиг.2, то тем самым достигается выполнение поставленной задачи.
Положительным эффектом применения этого датчика будет повышение качества сварных соединений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАДАТЧИК УГЛА НАКЛОНА СВАРОЧНОЙ ГОЛОВКИ | 2015 |
|
RU2597847C1 |
| АВТОМАТ ДЛЯ ДУГОВОЙ СВАРКИ НЕПОВОРОТНЫХ СТЫКОВ ТРУБОПРОВОДОВ | 1998 |
|
RU2167753C2 |
| ДАТЧИК КОРОТКИХ ЗАМЫКАНИЙ ДЛЯ ДУГОВОЙ СВАРКИ ИМПУЛЬСАМИ ТОКА И НАПРЯЖЕНИЯ В ЗАЩИТНЫХ ГАЗАХ | 1999 |
|
RU2165343C2 |
| Автомат для электрошлаковой сварки | 1987 |
|
SU1500452A1 |
| Датчик коротких замыканий дугового промежутка | 1983 |
|
SU1074675A1 |
| Способ электродуговой сварки с короткими замыканиями дугового промежутка и устройство для его осуществления | 1984 |
|
SU1168367A1 |
| СПОСОБ ЭЛЕКТРОДУГОВОЙ СВАРКИ ПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ С ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ ТОКА | 2004 |
|
RU2268809C1 |
| СПОСОБ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В ЗАЩИТНЫХ ГАЗАХ КОРНЕВЫХ СЛОЕВ СВАРНЫХ СОЕДИНЕНИЙ | 2008 |
|
RU2381092C2 |
| ОДНОФАЗНЫЙ ВЫПРЯМИТЕЛЬ ДЛЯ ДУГОВОЙ СВАРКИ | 2010 |
|
RU2441734C1 |
| УСТРОЙСТВО ДЛЯ ИМПУЛЬСНОГО ПИТАНИЯ СВАРОЧНОЙ ДУГИ | 2010 |
|
RU2457088C1 |

Изобретение относится к области электродуговой сварки, а именно к маятниковым датчикам пространственного положения сварочной ванны. Может найти применение для автоматизированной сварки неповоротных трубопроводных стыков, расположенных в вертикальной плоскости. Датчик содержит корпус, неподвижно закрепленный на механизме передвижения сварочной головки, гравитационно-чувствительный элемент, выполненный в виде маятника, преобразователь угла поворота в напряжение потенциометрического типа, блок электрического преобразования сигнала. К выводу преобразователя, которым являются средняя точка потенциометра и его движок, подключен делитель напряжения, состоящий из последовательно включенных сопротивления и трех параллельных цепей, одна из которых состоит из диода и нерегулируемого сопротивления, вторая - из диода и регулируемого сопротивления, а третья - из стабилитрона, регулируемого сопротивления и диода. Параллельно цепи, состоящей из трех параллельных цепей, подключена мостовая выпрямительная схема, с вывода которой снимается напряжение, представляющее закон управления углом наклона сварочной головки в функции пространственного положения сварочной ванны. Технический результат - повышение качества сварных соединений. 6 ил.
Функциональный датчик пространственного положения сварочной ванны, содержащий корпус, неподвижно закрепленный на механизме передвижения сварочной головки вдоль линии шва, гравитационно-чувствительный элемент, выполненный в виде маятника, закрепленного на оси преобразователя угла поворота в напряжение потенциометрического типа, отличающийся тем, что к выводу преобразователя угла поворота в напряжение, которым является средняя точка потенциометра и его движок, подключен делитель напряжения, состоящий из последовательно включенных сопротивления и трех параллельных цепей, одна из которых состоит из диода и нерегулируемого сопротивления, вторая цепь состоит из диода и регулируемого сопротивления, причем диод в этой цепи включен встречно по отношению к диоду первой цепи, третья цепь состоит из стабилитрона, регулируемого сопротивления и диода, причем диод третьей цепи включен в том же направлении, что и диод во второй цепи, а параллельно цепи, состоящей из трех параллельных цепей, подключена мостовая выпрямительная схема, с вывода которой снимается напряжение, представляющее закон управления углом наклона сварочной головки в функции пространственного положения сварочной ванны.
| Устройство для определения углов наклона объектов | 1990 |
|
SU1760318A1 |
| Маятниковый датчик угла наклона | 1990 |
|
SU1776992A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2065572C1 |
| US 4063366 А, 20.12.1977 | |||
| US 3143719 А, 04.08.1964. | |||

