Изобретение относится к области автоматического регулирования величин, определяющих местоположение движущегося объекта, и может быть использовано в радиолокационных системах управления.
Известен способ воздействия на радиоэлектронную систему управления путем излучения радиосигналов из двух пространственно разнесенных точек движущегося объекта. Если излучение сигналов производится в течение ограниченного интервала времени, притом периодически повторяется, а вслед за каждой посылкой наступает пауза, то такой вид излучения называется мерцанием (А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. М., Радио и связь, 1984 [1]). Естественным развитием мерцания является излучение из данной точки объекта, когда в соседней точке имеет место пауза (синхронное мерцание). Как в случае синхронного, так и несинхронного мерцания предполагается выдвижение определенных требований к закону изменения амплитуды излучаемых колебаний, однако на их фазовые соотношения какие-либо ограничения обычно не налагаются, вследствие чего такие колебания при приеме относят к категории некогерентных. При медленном мерцании, когда частота переключений находится в пределах полосы пропускания угловой следяшей системы подвергаемой воздействию радиолокационной станции (РЛС), происходит отслеживание источников излучения с раскачкой антенны РЛС внутри пространственной базы, что, конечно, является недостаточным для индивидуальной защиты объекта.
Наиболее близким к предлагаемому техническому решению является способ противодействия, основанный на создании фазовой неоднородности в раскрыве приемной антенны РЛС путем облучения ее из двух разнесенных точек пространства сигналами, имеющими на входе РЛС заданную разность фаз при наличии определенного соотношения амплитуд (С.А.Вакин, Л.Н.Шустов. Основы радиопротиводействия и радиотехнической разведки. М., Соврадио, 1968 [2]). Для осуществления известного способа в случае однопозиционной РЛС обычно используется принцип перекрестной ретрансляции, при котором радиоколебания, принятые от РЛС в двух разнесенных точках защищаемого объекта, перекрестно ретранслируются в соседние точки, откуда излучаются в направлении РЛС [3]. При этом усиление в каналах ретрансляции должно выдерживаться в нужных пределах, а в одно из направлений вводится заданный сдвиг по фазе. Вследствие одинакового пути прохождения волной пространства от передающей антенны РЛС через ретрансляцию до приемной антенны и с учетом вводимой разности фаз принятые колебания приближенно могут считаться когерентными. Отметим, что под однопозиционной понимается система, в которой приемная и передающая антенны пространственно совмещены и которая обслуживается общим блоком управления. В отличие от такого построения в многопозиционной системе имеется единый приемопередающий центр, облучающий одну или группу целей, а отраженные сигналы воспринимаются пространственно вынесенными приемниками, каждый из которых обслуживается своей системой управления.
Основные недостатки известного способа состоят в следующем.
Невозможность поддержания заданного сдвига фаз с достаточной точностью в широкой полосе частот при большом динамическом диапазоне сигналов, что связано с нелинейностью режима ретрансляции и зависимостью фазочастотных характеристик от уровня передаваемых сигналов.
Необходимость обеспечения идентичности проходных характеристик, что крайне трудно выполнить в условиях встречной ретрансляции.
Ограниченность развязок по диапазону частот при повышенном усилении делает систему склонной к самовозбуждению.
Способ полностью теряет эффективность при пространственном разносе передающей и приемной антенн РЛС, то есть в случае воздействия на многопозиционные системы управления.
Все указанные недостатки снижают эффективность противодействия системам управления.
Технический результат предлагаемого решения состоит в повышении эффективности противодействия системам управления, что выражается в увеличении раскачки антенны РЛС и повышении вероятности срыва слежения как в однопозиционной, так и в многопозиционной системах. Указанный результат касается как непрерывных, так и импульсных РЛС со средней и высокой частотой повторения импульсов.
Этот результат достигается тем, что принятые от РЛС колебания делят по мощности, генерируют напряжение переменной частоты, модулируют первое поделенное колебание полученным напряжением по фазе, при этом меняют частоту этого колебания в сторону увеличения ("увод вверх") или уменьшения ("увод вниз") от частоты принятого колебания до величины, соответствующей выбранной ложной доплеровской частоте, дополнительно модулируют колебание выбранной частоты по фазе с постоянной скоростью fM и разветвляют на три составляющие, центральную и две периферийные, меняют фазу центральной составляющей с той же постоянной скоростью fM, но в противоположном направлении, меняют фазу периферийных составляющих относительно центральной со скоростями Δf1(t) и Δf2(t), причем направления изменения их фазы противоположны по знаку, а модули равны |Δf1(t)|=|Δf2(t)|, светвляют центральную и периферийные промодулированные составляющие, образуют первое и второе светвленные колебания, генерируют напряжение типа меандр с частотой, превышающей полосу пропускания селектора РЛС, излучают поочередно с частотой меандра первое светвленное колебание из первой разнесенной точки объекта, а второе светвленное колебание - из второй точки, при этом сдвигают по фазе и меняют амплитуду одного из излучаемых колебаний относительно другого, а также образуют дополнительный канал ретрансляции, для чего второе поделенное колебание модулируют по фазе узкополосным шумом и излучают из третьей точки объекта.
Кроме того, при фазовой модуляции первого поделенного импульсного колебания СВЧ-импульсы расширяют путем их рециркуляции.
Весь цикл формирования сигналов разбит на два временных интервала. В течение первого интервала выполняются действия, направленные на нарушение в РЛС селекции по скорости, второй интервал предназначен для получения когерентных колебаний, воздействующих на угломерный координатор и его систему управления. Затем циклы могут повторяться.
Нарушение селекции цели производится независимо от режима работы цепей захвата в РЛС. Если отраженный от цели сигнал уже захвачен, он выводится из полосы пропускания доплеровского фильтра, а система автоподстройки частоты (АПЧ) РЛС переходит на слежение за сформированным сигналом сначала на этапе увода, а затем и на ложной доплеровской частоте. При этом существенно возрастают энергетические возможности формируемого сигнала (увеличивается отношение помеха/сигнал). В случае нахождения системы АПЧ в режиме поиска по частоте узкополосный шум, прикрывающий отраженный сигнал, затрудняет идентификацию и его распознавание, что препятствует захвату цели.
Увод в системе АПЧ РЛС может выполняться как в сторону увеличения частоты ("увод вверх"), так и в сторону уменьшения частоты ("увод вниз"). Начальной частотой при уводе является частота, достаточно близкая к частоте принимаемого сигнала (разница в 20-40 Гц). Конечной служит частота, превышающая полосу селекции и соответствующая выбранной ложной доплеровской частоте (обычно 1-10 кГц). Закон изменения частоты при уводе - линейный, реже параболический или экспоненциальный. Ускорение (вторая производная фазы) не превышает допустимого значения, определяемого предельным маневром цели. Для получения линейного изменения частоты необходима параболическая вариация фазы, ввиду чего при фазовой модуляции сигнала должно быть выработано модулирующее напряжение, обеспечивающее указанный закон изменения частоты.
В настоящем решении в отличие от известных подходов предлагается излучать не одиночные, а парные сигналы близких частот. Парные сигналы образуют биения, один из важнейших параметров которых - огибающая - не зависит от расфазирующих факторов, вызванных движением носителя. Объясняется это тем, что обе составляющие парного сигнала проходят от точки излучения до точки приема одинаковый путь в пространстве. Следует также отметить, что излучаемые из каждой точки объекта сигналы состоят не из одной, а двух пар (двухпарный сигнал), в которые входят центральная и две периферийные (боковых) составляющие. Периферийные составляющие сдвинуты по частоте относительно центральной составляющей, причем при определенной степени симметризации спектра взаимодействие между боковыми практически отсутствует. В целом весь спектр излучаемых сигналов должен быть в пределах полосы пропускания доплеровского фильтра РЛС, что необходимо для обеспечения воздействия на ее угломерный координатор. При этом использование возможностей стандартных видов модуляции крайне мало, т.к., например, применение амплитудной модуляции исключено ввиду наличия амплитудного ограничения при обработке сигналов в РЛС. Необходимо учитывать и некоторые другие требования, предъявляемые при выборе модуляции: возможность регулировки индекса модуляции, низкий уровень высших гармоник, малый остаток несущей и др. Кроме того, при противодействии импульсным РЛС, в том числе средствам со средней частотой повторения, следует предусмотреть повышение эффективности путем дополнительной противофазной частотной модуляции боковых в полосе следящей системы угломера РЛС.
Важнейшей особенностью формируемых сигналов является их когерентный характер. Стремление к поддержанию высокой степени когерентности может быть реализовано, если амплитудный спектр этих сигналов около центральной частоты будет иметь форму, близкую к четной, а фазовый спектр - к нечетной. Сам спектр должен быть стабильным и по возможности регулируемым, что может быть обеспечено стабилизацией модулирующих частот и соответствующей привязкой боковых. Всем указанным выше условиям отвечает система фазовой модуляции с двойным переносом несущей и автоподстройкой боковых частот.
Последовательность действий состоит в следующем. Полученный в результате увода СВЧ-сигнал подвергается фазовой модуляции, при этом изменение фазы производится с постоянной скоростью fM. Тем самым выполняется перенос несущей на величину fM, превышающую интервал возможных доплеровских частот. Боковые должны отстоять от центральной частоты на величину Δf1(t) и Δf2(t). Чтобы избежать низкочастотной модуляции и получить двухпарный сигнал, следует произвести возвратную фазовую модуляцию с постоянными скоростями fM, fM+Δf1(t), fM-Δf2(t), но в противоположном направлении. Это означает обратный перенос частоты с сохранением несущей и образованием двух боковых. В практическом плане полученный в результате прямого переноса частоты сигнал разветвляется на три составляющие, которые после возвратной модуляции и создают спектр двухпарного сигнала. Центральная компонента спектра с достаточной точностью совпадает с исходной частотой, а боковые отстоят от центральной частоты в соответствии с медленно меняющимися функциями Δf1,2(t), которые имеют постоянную и переменную части, равные по модулю и противоположные по знаку. Для повышения степени когерентности задающий сигнал частоты fM стабилизируется, а сигнал его дробной частоты  (p, q - целые неравные числа) используется в качестве опорного сигнала для автоматической подстройки частот fM+Δf1(t) и fM-Δf2(t). Симметризации спектра добиваются путем выравнивания амплитудных и фазовых характеристик боковых частот. Так, при набегах фазы φ1, φ2 (φ1>φ2) в плечо φ2 вводится элемент Δφ=φ1-φ2. Необходимость в регулирующих действиях обосновывается также тем, что при воздействии на угломер РЛС сигнал предварительно селектируется по частоте, а система АПЧ в РЛС отрабатывает "центр тяжести" сигнала по формуле E1Δf1=E2Δf2, и при равных амплитудах устраняется расфазировка, так как вблизи нуля дискриминационной характеристики выполняется равенство |Δf1|=|Δf2|. Следует также иметь в виду, что вследствие низких частот биений и вхождения этих частот в полосу доплеровского фильтра РЛС система АПЧ отслеживает разностную (доплеровскую) частоту излучаемых из разнесенных точек сигналов, нивелируя (компенсируя) приращение фазы, вызванное действием этих сигналов.
(p, q - целые неравные числа) используется в качестве опорного сигнала для автоматической подстройки частот fM+Δf1(t) и fM-Δf2(t). Симметризации спектра добиваются путем выравнивания амплитудных и фазовых характеристик боковых частот. Так, при набегах фазы φ1, φ2 (φ1>φ2) в плечо φ2 вводится элемент Δφ=φ1-φ2. Необходимость в регулирующих действиях обосновывается также тем, что при воздействии на угломер РЛС сигнал предварительно селектируется по частоте, а система АПЧ в РЛС отрабатывает "центр тяжести" сигнала по формуле E1Δf1=E2Δf2, и при равных амплитудах устраняется расфазировка, так как вблизи нуля дискриминационной характеристики выполняется равенство |Δf1|=|Δf2|. Следует также иметь в виду, что вследствие низких частот биений и вхождения этих частот в полосу доплеровского фильтра РЛС система АПЧ отслеживает разностную (доплеровскую) частоту излучаемых из разнесенных точек сигналов, нивелируя (компенсируя) приращение фазы, вызванное действием этих сигналов.
Далее промодулированные и выравненные боковые светвляются с центральной составляющей и образуются два (по числу каналов) светвленных колебания, которые поочередно ретранслируются к точкам излучения: первое светвленное колебание - к первой точке, а затем второе колебание - ко второй точке. Необходимость поочередного излучения диктуется требованием устранения взаимного влияния расфазирующих факторов при приеме сигналов из разных точек движущегося объекта. Периодическое переключение производится меандровым напряжением, частота которого на полтора-два порядка превышает полосу пропускания селектора РЛС, что обеспечивает слитность информации на выходе его узкополосного фильтра. Для поддержания когерентности сигналов в один из излучаемых сигналов вводится сдвиг по фазе (до 180 градусов), а также производится периодическое изменение соотношения амплитуд путем плавной регулировки с частотой, находящейся в пределах полосы пропускания следящей системы угломерного координатора РЛС.
Подтвердим сказанное некоторыми математическими выкладками.
Обозначая несущую частоту через ω0, а частоту модуляции Ω1,2(t)=2π|Δf1,2(t)|, запишем выражения для парных сигналов
Из первой точки могут излучаться сигналы u11(t) и u12(t), из второй точки - сигналы u21(t) и u22(t). Выравнивая амплитуды и фазы, а также принимая Vm1i=Vm2i (i=1,2,3), получим соотношения для излучаемых сигналов
где P1(t) и P2(t) - функции коммутации по закону меандра.
Отсюда могут быть определены огибающие парных сигналов, которые имеют вид
Отметим, что при Vm12=Vm13 огибающие Em11=Em12. Огибающие не зависят от внешних расфазирующих факторов.
Перейдем теперь к комплексной записи сигналов, что обычно делается для более наглядного представления производимых в РЛС преобразований. При этом следует учесть сдвиги фаз ψ1(t) и ψ2(t) излучаемых сигналов при движении объекта, а также различие в углах видения точек излучения θ1 и θ2. После частотных преобразований в РЛС имеем на входах фазового детектора разностного и суммарного каналов следующие соотношения
Здесь fΔ(θ) и fΣ(θ) - разностная и суммарная диаграммы направленности антенны РЛС, фаза φ1, входящая во все общие выражения (*), для простоты опущена.
Из полученных соотношений следует
где отброшены члены, частота которых находится вне полосы пропускания выходного фильтра детектора РЛС.
Полагая Vm12=Vm13, придем к равенству огибающих парных сигналов. Вследствие достаточно большого отношения сформированного сигнала к отраженному от цели, то есть отношения помеха/сигнал, динамическую ошибку системы АПЧ в РЛС при отслеживании помех считаем весьма малой. В этих условиях система отслеживает «центр тяжести» сигнала помехи, что приводит к взаимной компенсации расфазирующих параметров, то есть ψ1-ψ2=0. Имея это в виду, определим пеленгационную характеристику координатора РЛС с учетом действия сигнала помехи

При некоторых условиях это выражение уже содержит возможность выноса нуля характеристики, в том числе за пределы базы излучателей. Убедимся в этом на примере малых угловых отклонений от равносигнального направления, θ<<θ0.
При этом S(θ) приобретает вид

где µ - крутизна характеристики при θ=θ0. Отсчитывая от середины базы ξδ, имеем  ;
;  отсюда
отсюда
что при α=π дает
Следовательно, если a→1, имеет место вынос нуля за пределы базы.
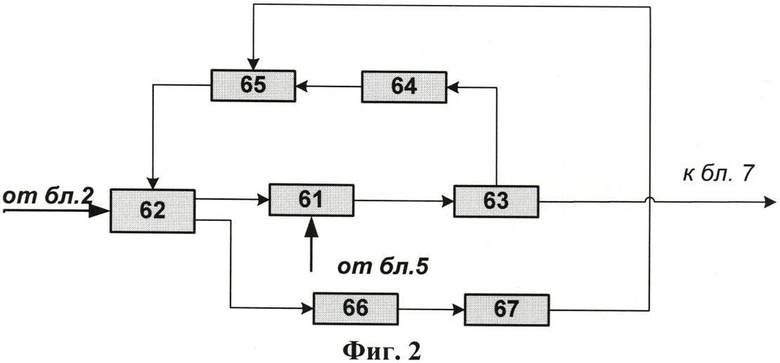
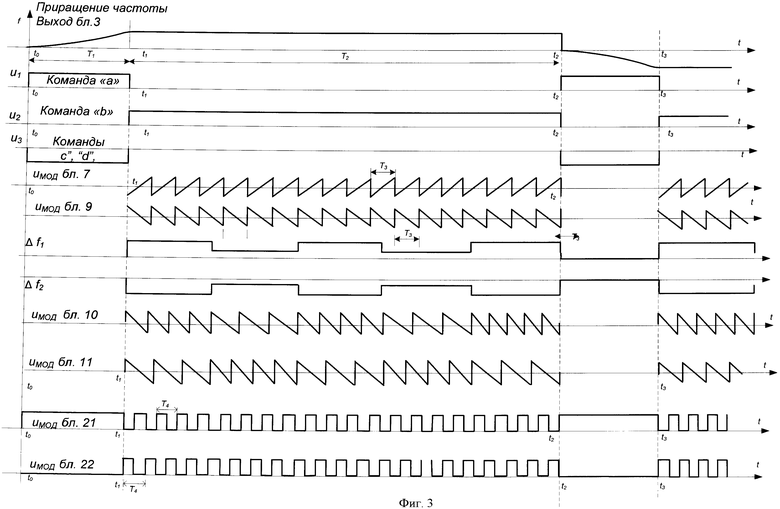
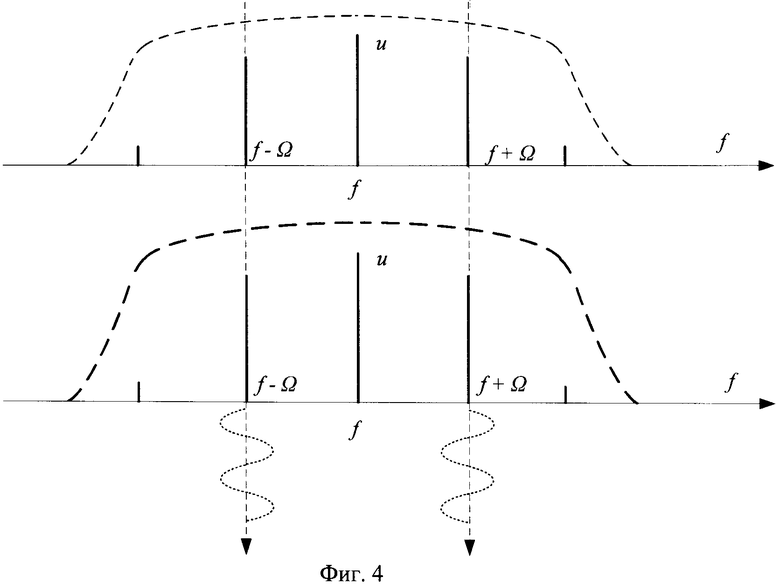
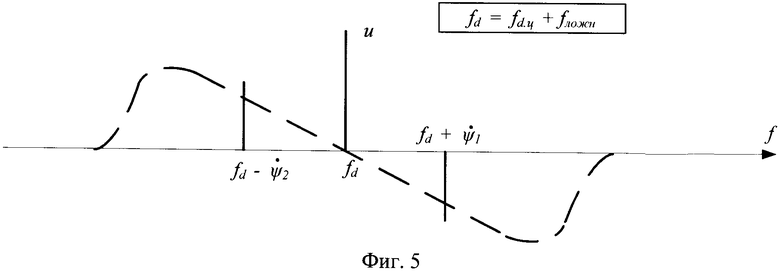
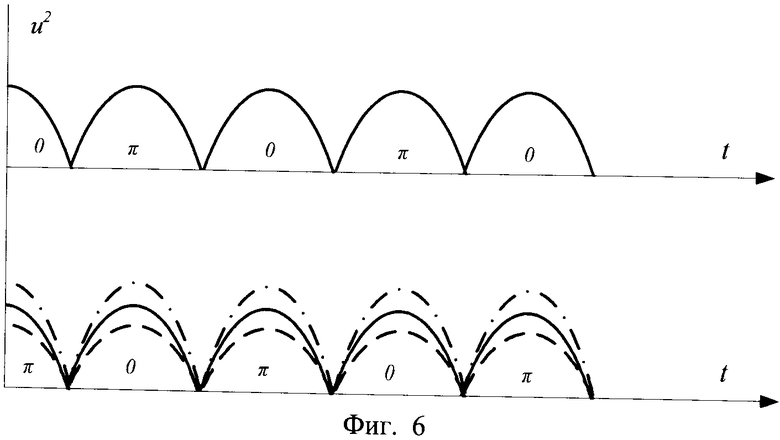
На фиг.1 приведена блок-схема реализации способа, на фиг.2 - схема блока 3, на фиг.3 изображены эпюры частот и напряжений в различных точках схемы, на фиг.4, а, б - спектр формируемых сигналов при Δf=const и Δf=var (пунктиром показана АЧХ селектора РЛС), на фиг.5 - составляющие спектра вблизи нуля дискриминатора системы АПЧ РЛС, на фиг.6 - огибающие биений при близких амплитудах (0, π - фаза несущей).
Приемная антенна 1 соединена с делителем мощности 2, выходы которого подключены к фазовым модуляторам 3 и 4. Генератор уводящего напряжения 5 соединен с модулирующим входом блока 3, а шумовой генератор 6 - с модулятором 4. Фазовый модулятор 7 подключен к разветвителю 8, выходы которого соединены с фазовыми модуляторами 9, 10 и 11. Последние через фазовые выравниватели 12 и 13, делители мощности 14, 15 и 16 соединены с амплитудными выравнивателями 17 и 18, которые подключены к светвителям 19 и 20. Указанные светвители подсоединены к СВЧ-переключателям 21 и 22, модулирующие входы которых соединены с генератором меандрового колебания 23. Выходы СВЧ-переключателей 21 и 22 через СВЧ-фазовращатель 24, аттенюаторы 25 и 26, направленные ответвители 27 и 28 подключены к передающим антеннам 29 и 30. Другие выходы ответвителей 27 и 28 соединены с блоками контроля 31 и 32. В схему также входит блок управления 33. Выход модулятора 4 соединен с передающей антенной 34. Высокостабильный генератор 35 своим первым выходом подключен к последовательно соединенным умножителю частоты в p раз 36, ограничителю-дифференциатору 37, делителю частоты в q раз 38 (p≠q, p, q - целые числа), резонансному каскаду 39. Первый подстраиваемый генератор 40 своим входом подключен к последовательно соединенным управляющему каскаду 41, низкочастотному фильтру 42, кварцевому частотному дискриминатору 43, узкополосному фильтру 44, а своим первым выходом - к смесителю 45. Второй подстраиваемый генератор 46 своим входом подключен к последовательно соединенным управляющему каскаду 47, низкочастотному фильтру 48, кварцевому частнотному дискриминатору 49, узкополостному фильтру 50, а своим первым выходом - к смесителю 51. Другие входы смесителей 45 и 51 через буферные каскады 52 и 53 подсоединены к делителю напряжения 54. Второй выход генератора 35 и выход генератора 55 соединены со смесителем 56, а через него - с парафазным усилителем 57. Третий выход генератора 35, как и вторые выходы генераторов 40 и 46, подключены к модулирующим входам блоков 7, 9-11 через формирователи пилообразных колебаний 58, 59 и 60.
СВЧ-фазовращатель 61 соединен с направленными ответвителями 62 и 63, а через них с линией задержки 64 и СВЧ-коммутатором 65. В схему также входят СВЧ импульсный детектор 66 и расширитель 67.
Принимаемый антенной 1 СВЧ-сигнал через делитель мощности 2 поступает на фазовый модулятор 3, предназначенный для формирования уводящих колебаний по скорости (первый временной интервал) и колебаний ложной (сдвинутой по частоте) псевдонесущей (второй временной интервал). В качестве фазового модулятора может быть использован СВЧ-фазовращатель с индексом модуляции (фазовым размахом) от 2π радиан, на модуляционный вход которого подаются пилообразные колебания (аналоговый вариант) или ступенчатое напряжение с пилообразной огибающей (дискретный вариант). Амплитуда соответствует фазовому отклонению 2kπ (k=1, 2…). Частота пилообразных колебаний меняется согласно выбранному закону увода, а на втором временном интервале в соответствии с ложной доплеровской частотой. Генератор уводящего напряжения 5 построен на основе управляемого генератора пилообразных колебаний в аналоговой или цифровой форме. Частота колебаний управляется напряжением (например, параболическим), формируемым в том же генераторе. Генераторы с электронной перестройкой частоты описаны в литературе [4].
Первый и второй интервалы времени задаются в блоке управления 33. В этом блоке путем деления частоты тактовых импульсов производится выделение граничных меток интервалов и формирование стробов разрешения и запрета работы отдельных блоков схемы. Так, в блок 5 поступает положительный импульс команды разрешения на увод по частоте (команда «а»), после окончания которого следует импульс разрешения на фиксацию выбранной частоты модуляции (команда «b»). На нормально включенные блоки 23, 58, 59 и 60 импульсы запрета поступают в течение первого временного интервала (команды «с» и «d»). В течение первого интервала блоки 7, 9-11 работают на проход (без модуляции).
Модулирующие напряжения подаются на блоки 7, 9, 10, 11 в течение второго временного интервала. С помощью модуляторов 7 и 9 формируется центральная составляющая спектра, с помощью модуляторов 7 и 10, а также модуляторов 7 и 11 создаются верхняя и нижняя боковые частоты. В качестве фазовых модуляторов используются такие СВЧ-приборы, как ЛБВ или диодные фазовращатели. Возможны как аналоговый, так и дискретный варианты модуляции. Для обоих вариантов амплитуда модулирующего напряжения на прямом ходу соответствует фазовому отклонению 2kπ (k=1, 2…) при минимальном обратном ходе. Важное значение имеет знак наклона пилообразных колебаний (или пилообразной огибающей). Если на модулирующий вход модулятора 7 подается напряжение с положительным наклоном пилы, то на одноименные входы модуляторов 9, 10, 11 должны поступать напряжения с отрицательным наклоном пилы, и, наоборот, при отрицательном наклоне пилы на входе разветвителя необходим положительный их наклон на выходе.
Ввиду наличия узкополосной селекции сигналов в РЛС боковые частоты формируемого спектра должны отстоять от центральной частоты не более чем на 100-200 Гц. Обеспечить качественную модуляцию на таких низких частотах крайне затруднительно как вследствие нестабильности по амплитуде и частоте, относительно высокого уровня помех в генераторах низких частот, так и засоренности спектра при низкочастотной модуляции. В этих условиях выполнять автономную регулировку составляющих спектра с повышенным индексом модуляции не представляется возможным.
В принятом техническом решении в результате двукратной модуляции одна из боковых лежит выше, а другая ниже частоты центральной составляющей. При этом центральная частота закварцована, а боковые создаются путем использования преобразованной стабильной опорной частоты и кварцованного частотного дискриминатора. В целом весь спектр стабилен и локализован.
Источником опорных синусоидальных колебаний является генератор 35. В результате умножения частоты этих колебаний в умножителе 36 в p раз (например, в 3 раза), ограничения и дифференцирования в блоке 37 запускается делитель частоты 38, собранный на триггерах. Частота поступающих импульсов делится в q раз (например, в 8 раз).
Опорные колебания образуются на выходах резонансных каскадов 52 и 53 и поступают на входы смесителей 45 и 51. На другие входы этих смесителей подаются колебания перестраиваемых генераторов 40 и 46. Основная гармоника разностной частоты с выхода смесителей проходит через узкополосные фильтры 44 и 50 и поступает на кварцованные частотные дискриминаторы 43 и 49. Резонансными элементами таких дискриминаторов являются индуктивность Lk и емкость Ck самого кварца и емкость С0 кварцедержателя. Высокостабильные резонансные пики жестко привязывают нуль дискриминационной характеристики к оси частот и существенно повышают крутизну вблизи нуля, что увеличивает добротность цепи обратной связи. Фильтры нижних частот 42 и 48, а также управляющие элементы 41 и 47 дополняют цепи обратной связи. Системы АПЧ с кварцованными дискриминаторами описаны в литературе [5] и широко используются на практике. Если принять в качестве примера частоту кварца в генераторе 35 равной 160 кГц, частоты кварцев в дискриминаторах 43 и 49 равными 100,2 и 99,8 кГц и учесть указанные выше значения p и q, получим частоты настройки генераторов 40 и 46 равными 160,2 и 159,8 кГц. На эти же частоты настраиваются и формирователи пилообразных колебаний 59 и 60; формирователь 58 создает парафазные (инверсные) пилообразные колебания той же частоты, что и генератор 35.
Для повышения угла раскачки систем управления многопозиционного типа предусматривается дополнительная модуляция боковых составляющих спектра. Частота модуляции (частота изменения переменной части Δf1,2(t)) находится в пределах полосы слежения в РЛС, но превышает раствор характеристики дискриминаторов 43 и 49. Модулирующие напряжения подаются на управляющие элементы 41 и 47 в противофазе с выхода парафазного усилителя 57. Формирование этих напряжений производится путем выделения разностной частоты колебаний генераторов 35 и 55 на выходе смесителя 56.
Выравниватели фазы 12 и 13 обеспечивают синфазность огибающих парных сигналов в каждом из каналов фазирования (на выходах светвителей 19 и 20). Для этого используются как пассивные элементы изменения фазы механического или поляризационного типов [6], так и твердотельные фазовращатели на диодах с отрезками длинных линий [7].
При выравнивании амплитуд фазируемых сигналов необходимо учитывать то, что огибающие биений зависят от двух параметров: разбалансировки боковых R, которую следует устранять, и выбранного отношения боковых частот к несущей β (β определяет индекс модуляции). Регулировка этих параметров производится в блоках 17 и 18 с помощью электронно управляемых аттенюаторов на pin-диодах путем изменения проходящего через них тока. Подобные аттенюаторы способны в двухоктавной полосе частот изменять затухание от единиц до 80 дБ, выпускаются промышленностью и описаны в литературе [7].
С выхода светвителей 19 и 20 сформированные сигналы поступают на СВЧ-переключатели 21 и 22. Источником управляющих напряжений для этих переключателей является блок 23, представляющий собой генератор меандровых колебаний с двумя противофазными выходами. В отсутствие модуляции переключатель 21 открыт, переключатель 22 закрыт. При включении управляющего напряжения они работают поочередно с частотой, превышающей полосу пропускания селектора РЛС на один-два порядка. Такой режим работы переключателей обеспечивает, с одной стороны, отсутствие паразитного влияния колебаний соседней точки излучения в каждый момент времени, а с другой стороны, суперпозицию (сложение) колебаний на выходе системы АПЧ РЛС. Переключатель 22 одного из каналов подключен к СВЧ-фазовращателю 24 со сдвигом фазы до 180°, что в совокупности и создает возможность поддержания когерентности сформированных сигналов с заданной разностью фаз. Регулировка относительного уровня сигналов в каналах выполняется с помощью постоянного 25 и переменного 26 аттенюаторов, при этом модулирующее напряжение на аттенюатор 26 подается с блока 33 (команда f) в виде периодической посылки с частотой, лежащей в полосе системы слежения по углам.
Контроль огибающих биений в каналах производится с помощью блоков 31 и 32, представляющих собой соединение СВЧ-диодов, подключенных к одному из выходных плечей ответвителей 27 и 28; и полосовых фильтров, настроенных на частоту биений.
Для прикрытия отметки цели в РЛС производится модуляция сигнала, снимаемого со второго выхода делителя 2, узкополосным шумом. В качестве источника шумовых колебаний используется диодный генератор, ток которого усиливается, а затем полученное напряжение фильтруется и ограничивается (блок 6). Образующиеся случайные импульсы с амплитудой, соответствующей размаху фазы π, поступают на фазовый модулятор 4. Промодулированные колебания передаются далее по третьему каналу ретрансляции и излучаются антенной 34.
Для кратковременного запоминания несущей частоты при поступлении СВЧ-импульсов со средней частотой повторения (50-100 кГц) в блоке 5 предусматривается охват фазового модулятора запаздывающей обратной связью, состоящей из линии задержки 64 и СВЧ-коммутатора 65. На управляющий вход этого коммутатора подаются расширенные видеоимпульсы с узла 67, длительность которых и определяет время запоминания несущей частоты.
Источники информации
1. А.И. Леонов, К.И. Фомичев Моноимпульсная радиолокация. М., Радио и связь, 1984.
2. С.А. Вакин, Л.Н. Шустов Основы радиопротиводействия и радиотехнической разведки. М., Соврадио, 1968.
3. В.О. Кобак. Радиолокационные отражатели п.6.3. М., Соврадио, 1975.
4. Ю.Н. Ерофеев. Импульсная техника. М., Высшая школа, 1984.
5. М.Р. Капланов, В.А. Левин. Автоматическая подстройка частоты. М., Энергоиздат, 1962.
6. А. Харвей. Техника сверхвысоких частот. Пер. с англ. М., Соврадио, 1965.
7. СВЧ полупроводниковые приборы и их применение. Пер. с англ. М., Мир, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОПРОТИВОДЕЙСТВИЯ | 2012 |
|
RU2485539C1 |
| СПОСОБ ПОДДЕРЖАНИЯ КОГЕРЕНТНОСТИ МОДУЛИРОВАННЫХ РАДИОСИГНАЛОВ | 2012 |
|
RU2476984C1 |
| СПОСОБ ФАЗИРОВАНИЯ РАДИОСИГНАЛОВ | 2012 |
|
RU2489729C1 |
| СПОСОБ СОЗДАНИЯ ДВУХЧАСТОТНОЙ ПОМЕХИ | 2012 |
|
RU2486536C1 |
| СПОСОБ ИМИТАЦИИ ДВУХЧАСТОТНЫХ РАДИОСИГНАЛОВ | 2012 |
|
RU2485541C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2001 |
|
RU2212712C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2011 |
|
RU2447509C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| АВТОМАТИЧЕСКАЯ СТАНЦИЯ ОТВЕТНЫХ ПОМЕХ | 1994 |
|
RU2103705C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
Заявленное изобретение относится к способу противодействия радиоэлектронным системам управления, предназначенным для радиолокационных комплексов с однопозиционным и многопозиционным построением. Технический результат состоит в повышении эффективности противодействия системам управления, что выражается в увеличении раскачки антенны РЛС и повышении вероятности срыва слежения как в однопозиционной, так и в многопозиционной системах. Указанный технический результат касается как непрерывных, так и импульсных РЛС со средней и высокой частотой повторения импульсов. Для этого принятый на движущемся объекте от облучающего средства системы непрерывный или импульсный радиосигнал модулируют по фазе на сдвинутой доплеровской частоте с постоянной скоростью fM. Разделяют промодулированный радиосигнал на три составляющие - центральную и две периферийные. Меняют фазу центральной составляющей с той же постоянной скоростью fM, но в противоположном направлении. Меняют фазу периферийных составляющих относительно центральной со скоростями Δf1(t) и Δf2(t), причем направления изменения их фазы противоположны по знаку, а модули равны |Δf1(t)|=|Δf2(t)|. Суммируют по двухканальной системе промодулированные центральную и периферийные составляющие. Одно из двух образованных суммарных радиосигналов сдвигают по фазе на 180 градусов и поочередно излучают оба сигнала из пространственно разнесенных точек объекта. Частоту переключений излучаемых сигналов выполняют превышающей полосу пропускания селектирующего устройства приемника радиолокатора. Для повышения вероятности срыва слежения производят увод по скорости и фазовую модуляцию узкополосным шумом на частоте принятого сигнала. 1 з.п. ф-лы, 6 ил.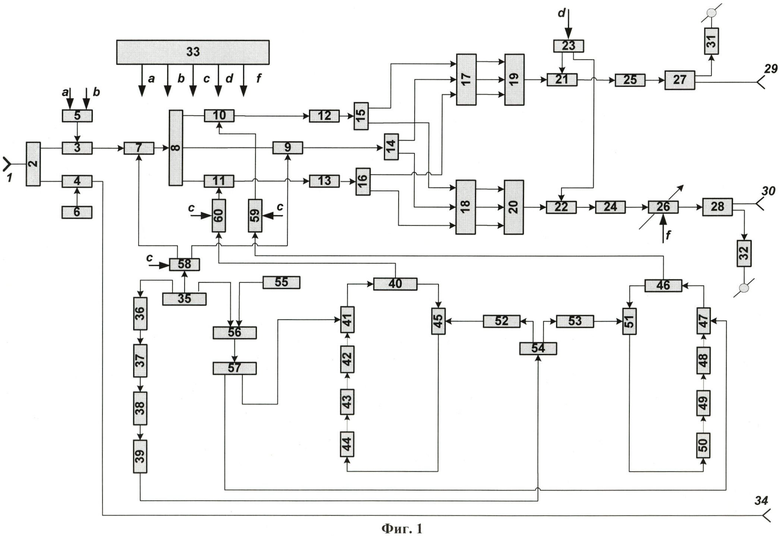
1. Способ противодействия радиоэлектронным системам управления, основанный на приеме на движущемся объекте непрерывных или импульсных колебаний облучающего средства системы управления, формировании модулированных сигналов для нарушения селекции по скорости движения и излучении их из пространственно разнесенных точек объекта в направлении сектора обслуживания системы управления, отличающийся тем, что принятые колебания делят по мощности, генерируют напряжение переменной частоты, модулируют первое поделенное колебание полученным напряжением по фазе, при этом частоту этого колебания меняют в сторону увеличения ("увод вверх") или уменьшения ("увод вниз") от частоты принятого колебания до величины, соответствующей выбранной ложной доплеровской частоте, дополнительно модулируют колебание выбранной частоты по фазе с постоянной скоростью fM и разветвляют на три составляющих: центральную и две периферийных, меняют фазу центральной составляющей с той же постоянной скоростью fM, но в противоположном направлении, меняют фазу периферийных составляющих относительно центральной со скоростями Δf1(t) и Δf2(t), причем направления изменения их фазы противоположны по знаку, а модули равны |Δf1(t)|=|Δf2(t)|, светвляют центральную и периферийные промодулированные составляющие, образуют первое и второе светвленные колебания, генерируют напряжение типа меандр с частотой, превышающей полосу пропускания селектора скорости, излучают поочередно с частотой меандра первое светвленное колебание из первой разнесенной точки объекта, а второе светвленное колебание - из второй точки, при этом сдвигают по фазе и меняют амплитуду одного из излучаемых колебаний относительно другого, а также образуют дополнительный канал ретрансляции, для чего второе поделенное колебание модулируют по фазе узкополосным шумом и излучают из третьей точки объекта.
2. Способ по п.1, отличающийся тем, что промодулированное по фазе первое поделенное импульсное колебание расширяют по длительности путем его рециркуляции.
| ВАКИН С.А., ШУСТОВ Л.Н | |||
| Основы радиопротиводействия и радиотехнической разведки | |||
| - М.: Соврадио, 1968 | |||
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2420754C2 |
| ЛАЗЕРНО-РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2004 |
|
RU2263930C1 |
| US 6650270 В1, 18.11.2003 | |||
| US 20100085243 A1, 08.04.2010. | |||

