Изобретение относится к радиотехнике и может быть использовано в радиолокации.
Известен способ излучения радиосигналов из двух пространственно разнесенных точек движущегося объекта. Если излучение сигналов производится периодически, а вслед за каждой посылкой наступает пауза, то такой вид излучения называют мерцанием (А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. М.: Радио и связь, 1984 [1]). Естественным развитием мерцания является излучение из любой точки объекта, когда в соседней точке выдерживается пауза (синхронное мерцание). Синхронное или несинхронное мерцание предполагает выдвижение определенных требований к закону изменения амплитуды излучаемых сигналов, в то время как на фазовые соотношения какие-либо ограничения обычно не налагаются, вследствие чего принимаемые на входе радиолокационной станции (РЛС) колебания относят к категории некогерентных. При медленном мерцании, когда частота переключений находится в пределах полосы пропускания следящей системы угломерного координатора РЛС, происходит отслеживание источников излучения с раскачкой антенны РЛС внутри пространственной базы, что, конечно, является недостаточным при индивидуальной защите объекта.
Наиболее близким к предлагаемому решению является способ поддержания когерентности радиосигналов, основанный на формировании искаженного фазового фронта волны вблизи приемной антенны РЛС путем облучения ее из двух пространственно разнесенных точек объекта сигналами с заданными амплитудными и фазовыми соотношениями (Теоретические основы радиолокации. Под ред. В.Е.Дулевича. М.: Соврадио, 1978 [2]). При излучении сигнала с точечной цели фронт волны представляет собой сферу, направление нормали к которой совпадает с направлением РЛС-цель. За счет интерференции волн от двух пространственно разнесенных источников фазовый фронт меняет направление, что вызывает ошибки при пеленгации цели. При медленной вариации амплитуды или разности фаз излучаемых сигналов относительно заданного значения происходит раскачка антенны РЛС вплоть до выбега за пределы пространственной базы и срыва слежения. Для реализации известного способа в случае моностатической РЛС обычно используется принцип перекрестной ретрансляции [3], при котором радиоколебания, принятые от РЛС в двух разнесенных точках объекта, перекрестно передаются по трактам ретрансляции в соседнюю точку, откуда излучаются в направлении РЛС. При этом усиление в каналах ретрансляции выдерживается в нужных пределах, а в один из каналов вводится заданный сдвиг по фазе. Вследствие одинакового пути прохождения волной пространства от передающей антенны РЛС через ретрансляторы до ее приемной антенны и с учетом вводимой фазы формируемые колебания приближенно могут считаться когерентными.
Основные недостатки известного способа состоят в следующем.
Невозможность поддержания заданного сдвига фаз с достаточной точностью в широком диапазоне частот при большом динамическом диапазоне сигналов ввиду существенной нелинейности ретрансляторов и зависимости фазочастотных характеристик от уровня сигналов.
Трудности обеспечения идентичности проходных характеристик усугубляются при встречной ретрансляции.
Ограниченность развязок по диапазону частот делает систему склонной к самовозбуждению.
Способ полностью теряет эффективность при пространственном разносе передающей и приемной антенн РЛС, то есть в случае бистатических РЛС.
Технический результат предлагаемого решения состоит в повышении вероятности поддержания когерентности формируемых радиосигналов, что выражается в увеличении раскачки антенны РЛС с выходом ее диаграммы за пределы видимой базы и повышении тенденции к срыву слежения в РЛС.
Этот результат достигается тем, что принятые от РЛС колебания делят по мощности, генерируют напряжение переменной частоты, модулируют первое поделенное колебание полученным напряжением по фазе, при этом частоту этого колебания меняют в сторону увеличения ("увод вверх") или уменьшения ("увод вниз") от частоты принятого колебания до величины, соответствующей выбранной ложной доплеровской частоте, после чего выбранную частоту модуляции выдерживают неизменной (фиксированной), разветвляют промодулированное колебание на три составляющих, генерируют два пилообразных инверсных (с противоположным наклоном) напряжения низкой частоты, модулируют по фазе первую и вторую составляющие разветвленного колебания полученными инверсными напряжениями с размахом 2kπ (k=1, 2 …), светвляют третью составляющую разветвленного колебания с промодулированными первой и второй составляющими, образуют первое и второе светвленные колебания, генерируют напряжение типа меандр с частотой, превышающей полосу пропускания селектора РЛС, излучают поочередно с частотой меандра первое светвленное колебание из первой разнесенной точки объекта, а второе светвленное колебание - из второй точки, при этом сдвигают по фазе и меняют амплитуду одного из излучаемых колебаний относительно другого, а также образуют дополнительный канал ретрансляции, для чего второе поделенное колебание модулируют по фазе узкополосным шумом и излучают из третьей точки объекта.
Весь цикл воздействия сигналов разбит на два временных интервала. В течение первого интервала выполняются операции, связанные с нарушением в РЛС селекции сигналов по скорости, второй интервал предназначен для формирования когерентных колебаний и воздействия их на системы углового слежения РЛС. Затем циклы могут повторяться.
Нарушение селекции цели производится независимо от режима работы устройств захвата в РЛС. Если отраженный от цели сигнал уже захвачен, он выводится из полосы пропускания доплеровского фильтра РЛС, а система автоподстройки частоты (АПЧ) переходит на слежение за сформированным сигналом сначала на этапе увода, а затем и на ложной доплеровской частоте. При этом возрастают энергетические возможности формируемых сигналов (увеличивается отношение их мощности к мощности отраженного сигнала). В случае, когда система находится в режиме поиска по частоте, прикрывающий отраженный сигнал узкополосный шум затрудняет идентификацию и распознавание, что препятствует захвату цели.
Увод системы АПЧ в РЛС может выполняться как в сторону увеличения частоты ("увод вверх"), так и в сторону пониженных частот ("увод вниз"). Начальной частотой при уводе является частота, достаточно близкая к частоте принимаемого колебания (разность в 20-40 Гц), конечной служит частота, превышающая полосу селекции и соответствующая выбранной ложной доплеровской частоте (обычно единицы кГц). Закон изменения частоты - линейный, реже - параболический или экспоненциальный. Ускорение (вторая производная фазы) не превышает допустимого значения, определяемого предельным маневром цели. Для получения линейного изменения частоты необходима параболическая вариация фазы, в связи с чем при фазовой модуляции принимаемого колебания должно быть сформировано модулирующее напряжение, обеспечивающее надлежащий закон изменения частоты.
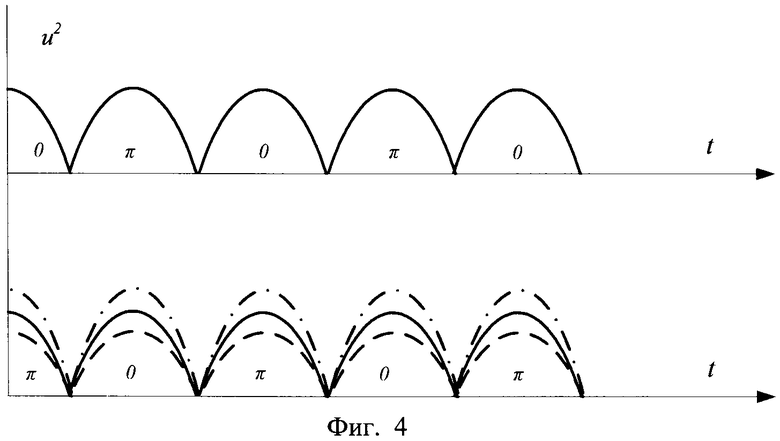
В настоящем техническом решении в отличие от известных подходов из пространственно разнесенных точек движущегося объекта излучаются не одиночные, а парные сигналы близких частот. Каждая пара излучаемых сигналов образует биения, один из важнейших параметров которых - огибающая - не зависит от расфазирующих факторов, вызванных движением объекта. Это объясняется тем, что обе составляющих пары проходят одинаковый путь до приемной антенны РЛС. Сам излучаемый сигнал имеет двухпарную структуру и состоит из центральной составляющей и двух боковых. Весь спектр сигнала укладывается в полосу доплеровского фильтра РЛС. Вследствие инверсности модулирующих напряжений обеспечивается частотная симметрия спектра, а сам принцип пилообразной фазовой модуляции создает условия для резкого снижения уровня высших гармоник и появления возможности увеличения (с последующей регулировкой) индекса модуляции. Использование для решения задачи амплитудной модуляции исключено ввиду наличия в системе обработки РЛС ограничения по амплитуде. Кроме того, двухпарная структура сигнала предполагает суммирование результатов биений входящих пар, а также облегчает настройку системы АПЧ РЛС на центральную часть спектра сформированного сигнала, что снижает ошибку фазирования. Для поддержания когерентности создаваемых сигналов следует стремиться к тому, чтобы амплитудный спектр сигнала был четным, а фазовый - нечетным. Для этого используется выравнивание амплитудных и фазовых характеристик в каждом из каналов ретрансляции. Фазовое выравнивание может быть выполнено путем применения пассивной фазовой коррекции. Например, при набегах φ1, φ2 (φ1>φ2) во второе плечо вводится элемент Δφ=φ1-φ2. Амплитудное выравнивание осуществляется путем регулируемой аттенюации. Отметим, что при различных амплитудах боковых система АПЧ РЛС отрабатывает на линейном участке дискриминационной характеристики "центр тяжести" сигнала E1Δf1=E2Δf2 [4] и точно подстроиться не удается. При равных амплитудах система устраняет расфазировку, т.к Δf1-Δf2=0.
В результате светвления составляющих образуются два светвленных колебания. Эти колебания передаются к точкам излучения поочередно. Разновременность излучения сигналов с концов базы обеспечивает отсутствие взаимовлияния расфазирующих факторов при движении объекта. Частота переключений (частота меандра) на один-два порядка превышает полосу доплеровского фильтра РЛС, что обеспечивает слитность информации при угловом сопровождении сформированных когерентных сигналов.
Следует также иметь в виду, что вследствие низких частот биений и вхождения этих частот в полосу доплеровского фильтра РЛС система АПЧ отрабатывает разностную (доплеровскую) частоту излучаемых из разнесенных точек сигналов, нивелируя (компенсируя) приращение фазы, вызванное действием этих сигналов.
Таким образом, используется ретрансляционная система типа "один вход-два выхода", в которую легче ввести и поддерживать требуемую разность фаз. Для этого в один из каналов вводится заданный сдвиг по фазе (до 180 градусов). Кроме того, периодически меняется соотношение амплитуд излучаемых сигналов около оптимального значения, причем частота возврата находится в пределах полосы пропускания следящей системы угломерного координатора РЛС.
Рассмотрим вопрос с математической точки зрения.
Обозначая несущую частоту через ω0, а частоту модуляции через Ω, запишем выражения для парных сигналов




Для первой точки излучения имеем сигналы u11(t) и u12(t), для второй точки сигналы u21(t) и u22(t). Полагая Vm1i=Vm2i (i=1, 2, 3), выравнивая амплитуды и фазы, получим соотношения для излучаемых сигналов




где P1(t) и P2(t) - функции коммутации по закону меандра.
Огибающие сигналов u1i(t) и u2i(t) (i=1, 2) имеют вид


 ;
; 
Отметим, что при Vm12(t)=Vm13 огибающие Em11=Em12. Как видно, огибающие не зависят от параметров ψ1 и ψ2 (см. ниже).
Перейдем теперь к комплексной записи сигналов, что обычно делается для более наглядного представления производимых в РЛС преобразований. При этом следует учесть сдвиги фаз ψ1(t) и ψ2(t) излучаемых сигналов при движении объекта, а также различия в углах видения θ1 и θ2. После частотных преобразований в РЛС имеем на входах фазового детектора разностного и суммарного каналов следующие соотношения


Здесь fΔ(θ) и fΣ(θ) - разностная и суммарная диаграммы направленности антенны РЛС, фаза φ1, входящая в общие выражения, для простоты не учитывается.
Из полученных соотношений следует
где отброшены члены, частоты которых находятся вне полосы пропускания выходного фильтра детектора.
Полагая Vm12=Vm13, а также то, что имеет место взаимная компенсация, при этом ψ1≈ψ2, получим пеленгационную характеристику в виде

Эта характеристика при определенных условиях уже содержит возможность сдвига нуля, в том числе за пределы базы. Убедимся в этом на примере малых угловых отклонений от равносигнального направления, θ<<θ0. При этом S(θ) приобретает вид

где µ - крутизна характеристики при θ=θ0
Отсчитывая от середины базы ξδ, имеем  ;
;  , отсюда
, отсюда
что при α=π дает
Следовательно, если a→1, имеет место смещение за пределы базы.
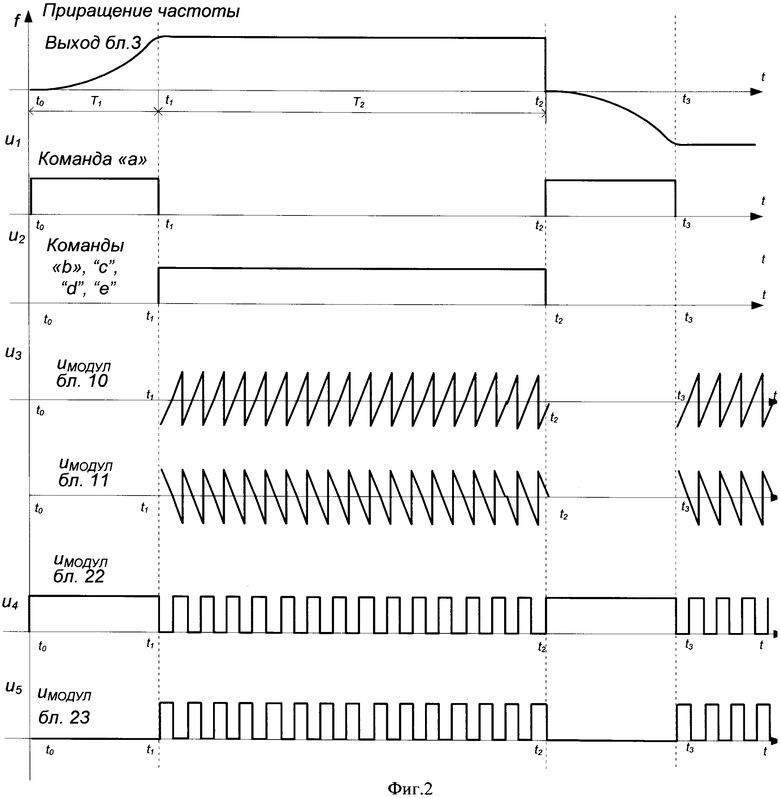
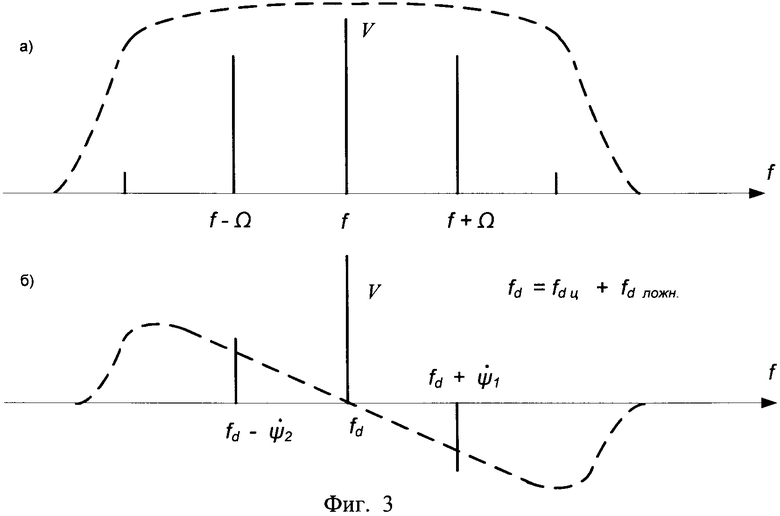
На фиг.1 приведена блок-схема реализации способа, на фиг 2 изображены эпюры напряжений в различных точках схемы, на фиг.3a - спектр формируемых сигналов (пунктиром показана амплитудно-частотная характеристика узкополосного доплеровского фильтра), на фиг.3, b - составляющие спектра вблизи нуля дискриминационной характеристики (пунктир) системы АПЧ, на фиг.4 - огибающие биений в точках излучения при близких амплитудах (0,π фаза несущей).
Приемная антенна 1 соединена с делителем 2, выходы которого подключены к фазовым модуляторам 3 и 4. Блок формирования модулирующего напряжения 5 соединен с модуляционным входом модулятора 3, а шумовой генератор 6 - с модулятором 4. Разветвитель 7 подключен своими крайними выходами к СВЧ коммутаторам 8 и 9, а через них - к фазовым модуляторам 10 и 11, модуляционные входы которых соединены с блоком формирования модулирующих напряжений 12. Фазовые выравниватели 13 и 14 подключены ко входам делителей 15 и 16, а средний выход разветвителя 7 - ко входу делителя 17. Выходы делителей 15, 16 и 17 соединены с амплитудными выравнивателями 18 и 19, а через них - со светвителями 20 и 21. СВЧ переключатели 22 и 23 подключены управляющими входами к генератору напряжения типа меандр 24, а выходами - к фазовращателю 25, аттенюатору 26 и управляемому аттенюатору 27. Выходы аттенюаторов 26 и 27 через направленные ответвители соединены с передающими антеннами 28 и 29, а также с блоками контроля 30 и 31, состоящими из СВЧ детекторных головок и фильтров. Выход модулятора 4 подключен к передающей антенне 32. В схему также входит блок управления 33, подключенный к точкам, указанным на схеме.
Принимаемый антенной 1 сигнал поступает на делитель мощности 2, первый выход которого подключен к фазовому модулятору 3, предназначенному для формирования сигналов увода по скорости (первый временной интервал) и сигналов ложной (сдвинутой по частоте) псевдонесущей (второй временной интервал). Другой выход делителя 2 соединен с фазовым модулятором 4, осуществляющим прикрытие шумом на частоте отраженного сигнала для предотвращения его захвата в РЛС.
При реализации увода по частоте в качестве фазового модулятора используется СВЧ фазовращатель с индексом модуляции 2π радиан, на модуляционный вход которого подается пилообразное напряжение (аналоговый вариант) или ступенчатое напряжение с пилообразной огибающей (дискретный вариант). Частота пилообразных колебаний определяется выбранным законом увода. Так, при линейном уводе частота модуляции меняется по параболическому закону. К известным фазовым модуляторам относятся лампы бегущей волны (ЛБВ) и диодные СВЧ фазовращатели с отрезками линий передачи [5]. При изменении направления увода (с «увода вверх» на «увод вниз» и обратно) знак наклона модулирующих колебаний меняется на противоположный. Блок формирования модулирующего напряжения 5 построен на основе управляемого генератора пилообразных колебаний в аналоговой или дискретной форме. Подобные генераторы с электронной перестройкой частоты известны и описаны в литературе [6]. В течение первого временного интервала частота колебаний при уводе меняется от частоты принятого сигнала (разность не более 20-50 Гц) до значения, соответствующего выбранной ложной доплеровской частоте (1-10 кГц). Выбранное значение частоты псевдонесущей сохраняется неизменным в течение второго временного интервала.
Первый и второй интервалы времени задаются в блоке управления 33. Путем деления частоты тактовых импульсов в этом блоке производится выделение граничных отметок и формирование стробов разрешения работы в первом и втором интервалах времени. Так, в блок 5 поступает сначала положительный импульс разрешения на увод по частоте (команда «а), а затем импульс разрешения на формирование фазируемых сигналов (команда «b»).
Также подаются импульсы разрешения на работу во втором временном интервале к блокам 12 и 24 (команды «d» и «e»). Разветвитель 7, на который поступают модулированные колебания с блока 3, имеет три выходных отвода: два периферийных и один центральный. Периферийные каналы нормально заблокированы с помощью СВЧ коммутаторов 8 и 9, которые открываются импульсами разрешения с блока 33 во втором временном интервале (команда «с»). Радиосигналы с выхода центрального отвода разветвителя 7 подаются в течение первого временного интервала к антенне 28 через нормально открытый СВЧ переключатель 22, а в течение второго временного интервала - поочередно к антеннам 28 и 29.
В течение второго временного интервала производится формирование фазированных сигналов. Для этого используются фазовые модуляторы 10 и 11, на модулирующие входы которых с блока 12 поступают инверсные пилообразные напряжения с амплитудой, соответствующей размаху фазы 2π. Инверсная модуляция (модуляция пилообразными колебаниями с противоположным наклоном) позволяет получить автономный (независимый от несущей частоты) спектр симметричных боковых с малым уровнем высших гармоник и остатка несущей. При этом достигается возможность регулировки индексов модуляции.
В качестве модуляторов используются упомянутые выше ламповые или твердотельные СВЧ фазовращатели, блок 12 строится на базе аналогового или дискретного генератора пилообразных колебаний с инверсными выходами.
Выравниватели фазы обеспечивают синфазность огибающих в каждом из каналов фазирования (на выходах светвителей 20 и 21). Для этого используются как пассивные фазовращательные элементы механического или поляризационного типов [7], так и твердотельные фазовращатели на диодах с отрезками длинных линий [5].
При выравнивании амплитудных соотношений сигналов необходимо учитывать то обстоятельство, что огибающие биений парных колебаний определяются двумя параметрами: разбалансировкой R боковых, которую надо сводить к минимуму, и отношением боковой к несущей β (β можно назвать индексом модуляции). В соответствии с этим регулировке подлежат указанные параметры, для чего из блока 33 поступают команды g и h. Регулировка производится электронно управляемыми аттенюаторами на pin-диодах, путем изменения напряжения смещения. Перестраиваемые аттенюаторы этого типа выпускаются промышленностью и описаны в литературе [5].
При выравнивании учитываются конструктивные особенности светвителей 20 и 21, с выхода которых сформированные сигналы поступают на СВЧ переключатели 22 и 23. Источником модулирующих напряжений для этих переключателей является блок 24, представляющий собой генератор меандровых колебаний с двумя противофазными выходами. В отсутствие модуляции переключатель 22 открыт, переключатель 23 закрыт, при включении модуляции они работают поочередно с частотой, превышающей полосу пропускания селектора РЛС на один-два порядка. Такой режим работы переключателей обеспечивает, с одной стороны, отсутствие паразитного влияния колебаний соседней точки излучения в каждый момент времени, а, с другой стороны, суперпозицию (сложение) колебаний на выходе системы АПЧ. На выходе переключателя 23 одного из каналов включен фазовращатель 25 со сдвигом фазы до 180°, что в совокупности и создает возможность поддержания когерентности сформированных сигналов с заданной разностью фаз. Регулировка относительного уровня сигналов выполняется с помощью постоянного 26 и переменного 27 аттенюаторов, при этом модулирующее напряжение на аттенюатор 27 подается с блока 33 (команда f) в виде периодической посылки с частотой, лежащей в полосе системы слежения РЛС по углам.
Для прикрытия цели на частоте отраженного сигнала производится модуляция по фазе выходного сигнала делителя 2 узкополосным шумом с превышением 3-4 дБ. В качестве источника шумовых колебаний используется диодный генератор, ток которого усиливается, а затем полученное напряжение фильтруется и ограничивается (блок 6). Образующиеся случайные импульсы с амплитудой, соответствующей размаху фазы π радиан, поступают на фазовый модулятор 4. Промодулированные колебания передаются далее по третьему каналу ретрансляции и излучаются антенной 32.
Источники информации
1. А.И. Леонов, К.И. Фомичев. Моноимпульсная радиолокация. М.: Радио и связь, 1984.
2. Теоретические основы радиолокации. Под ред. В.Е. Дулевича. М.: Соврадио, 1978.
3. Антенные решетки. Гл. 9. Сборник под ред. Л.С. Бененсона. М.: Соврадио, 1966.
4. Д. Миддлтон. Введение в статистическую теорию связи. Гл. 14, т. 2. М.: Соврадио, 1962.
5. СВЧ - полупроводниковые приборы и их применение. Пер. с англ. М.: Мир, 1972.
6. Ю.Н. Ерофеев. Импульсная техника. М.: Высшая школа, 1984.
7. А. Харвей. Техника сверхвысоких частот. Пер с англ. М.: Соврадио, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОПРОТИВОДЕЙСТВИЯ | 2012 |
|
RU2485539C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ РАДИОЭЛЕКТРОННЫМ СИСТЕМАМ УПРАВЛЕНИЯ | 2012 |
|
RU2483341C1 |
| СПОСОБ ФАЗИРОВАНИЯ РАДИОСИГНАЛОВ | 2012 |
|
RU2489729C1 |
| СПОСОБ СОЗДАНИЯ ДВУХЧАСТОТНОЙ ПОМЕХИ | 2012 |
|
RU2486536C1 |
| СПОСОБ ИМИТАЦИИ ДВУХЧАСТОТНЫХ РАДИОСИГНАЛОВ | 2012 |
|
RU2485541C1 |
| АВТОМАТИЧЕСКАЯ СТАНЦИЯ ОТВЕТНЫХ ПОМЕХ | 1994 |
|
RU2103705C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОГЕРЕНТНОЙ ПОМЕХИ | 2010 |
|
RU2443058C2 |
| Ретранслятор частотномодулированных колебаний | 1977 |
|
SU680186A1 |
| Когерентная помеха "пинг-понг" и цифровая радиочастотная память с обратным воспроизведением | 2020 |
|
RU2742532C1 |
| КОГЕРЕНТНО-ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2568107C1 |
Способ поддержания когерентности модулированных радиосигналов относится к радиотехнике и может использоваться в радиолокации. Достигаемый технический результат - повышение вероятности поддержания когерентности формируемых радиосигналов. Способ поддержания когерентности модулированных сигналов основан на приеме на движущемся объекте непрерывных или импульсных колебаний облучающей радиолокационной станции (РЛС) с селекцией по скорости, модуляции принятых колебаний и излучении их из пространственно разнесенных точек объекта в направлении сектора обслуживания этой РЛС, при этом принятые колебания делят по мощности, генерируют напряжение переменной частоты, модулируют первое поделенное колебание полученным напряжением по фазе, при этом частоту этого колебания меняют в сторону увеличения или уменьшения от частоты принятого колебания до величины, соответствующей выбранной ложной доплеровской частоте, после чего выбранную частоту модуляции выдерживают неизменной, разветвляют промодулированное колебание на три составляющих, модулируют по фазе первую и вторую составляющие разветвленного колебания, светвляют третью составляющую разветвленного колебания с промодулированными первой и второй составляющими, излучают светвленные колебания поочередно с частотой меандра, а также образуют дополнительный канал ретрансляции. 4 ил.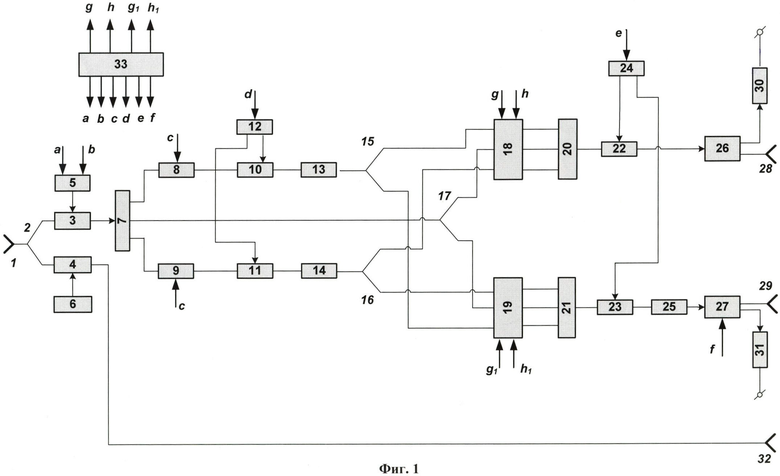
Способ поддержания когерентности модулированных радиосигналов, основанный на приеме на движущемся объекте непрерывных или импульсных колебаний облучающей радиолокационной станции (РЛС) с селекцией по скорости, модуляции принятых колебаний и излучении их из пространственно разнесенных точек объекта в направлении сектора обслуживания этой РЛС, отличающийся тем, что принятые колебания делят по мощности, генерируют напряжение переменной частоты, модулируют первое поделенное колебание полученным напряжением по фазе, при этом частоту этого колебания меняют в сторону увеличения ("увод вверх") или уменьшения ("увод вниз") от частоты принятого колебания до величины, соответствующей выбранной ложной доплеровской частоте, после чего выбранную частоту модуляции выдерживают неизменной (фиксированной), разветвляют промодулированное колебание на три составляющих, генерируют два пилообразных инверсных (с противоположным наклоном) напряжения низкой частоты, модулируют по фазе первую и вторую составляющие разветвленного колебания полученными инверсными напряжениями с размахом 2kπ (k=1, 2, …), светвляют третью составляющую разветвленного колебания с промодулированными первой и второй составляющими, образуют первое и второе светвленные колебания, генерируют напряжение типа меандр с частотой, превышающей полосу пропускания селектора РЛС, излучают поочередно с частотой меандра первое светвленное колебание из первой разнесенной точки объекта, а второе светвленное колебание - из второй точки, при этом сдвигают по фазе и меняют амплитуду одного из излучаемых колебаний относительно другого, а также образуют дополнительный канал ретрансляции, для чего второе поделенное колебание модулируют по фазе узкополосным шумом и излучают из третьей точки объекта.
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| US 7920637 В2, 05.04.2011 | |||
| US 6697345 В1, 24.02.2004 | |||
| ЕР 1324513 В1, 14.02.2007. | |||

