Изобретение относится к авиационной технике и может быть использовано для повышения точности определения на борту летательного аппарата (ЛА) воздушных параметров, зависящих от статического давления (барометрической высоты, приборной скорости, воздушной скорости, вертикальной скорости, числа Маха). В частности, одним из вариантов использования изобретения является учет характеристик запаздывания в программно-математическом обеспечении системы воздушных сигналов для алгоритмической компенсации погрешностей измерения воздушных параметров, обусловленных запаздыванием в пневмотракте статического давления.
В описании использованы следующие сокращения и термины:
ЛА - летательный аппарат,
ПВД - приемник воздушного давления,
ПМО - программно-математическое обеспечение,
СВС - система воздушных сигналов (вычислительно-информационная система, состоящая из цифрового вычислителя, конструктивно совмещенного с датчиками давления, приемника воздушного давления, сопряженного пневматическими линиями связи (пневмотрактами) с датчиками давления, датчиков угла атаки, угла скольжения и температуры, сопряженных с вычислителем электрическими линиями связи),
СНС - спутниковая навигационная система.
Пневмотракт статического давления - трубопроводная система, служащая для передачи статического давления от ПВД к датчику давления, включающая следующие конструктивные элементы: камеру для восприятия давления (сообщенную с атмосферой с помощью отверстий на ПВД для забора статического давления), соединительные шланги, штуцеры, влагоотстойники, тройники, краны и т.д.
Вход пневмотракта - отверстия на ПВД для забора статического давления.
Выход пневмотракта - место в пневмотракте, где подключены датчики давления.
Прототипом изобретения является способ определения запаздывания в пневмотракте передачи статического давления при наземных работах на ЛА, изложенный в работе [Котик М.Г., Павлов А.В. и др. Летные испытания самолетов. - М.: Машиностроение, 1968, с.55-59]. Для определения запаздывания, к тому месту пневмотракта, в котором определяется запаздывание (выходу пневмотракта), подключают регистрирующие приборы-самописцы для непрерывного измерения давления, закрывают заборные отверстия ПВД и создают вакуум в пневмотракте. Далее, открывают отверстия ПВД и регистрируют процесс изменения давления по времени. При обработке результатов предполагают, что процесс запаздывания является апериодическим и описывается следующим уравнением:
где pНАР - давление наружного воздуха (атмосферное давление у земли),
р и  - давление на выходе пневмотракта (в месте определения запаздывания) и его производная по времени,
- давление на выходе пневмотракта (в месте определения запаздывания) и его производная по времени,
λз - коэффициент запаздывания (коэффициент пропорциональности между перепадом давлений на входе и выходе пневмотракта и скоростью изменения давления на выходе пневмотракта, зависящий от температуры и давления наружного воздуха).
При этих предположениях λз вычисляют по формуле:

где p1 и р2 - значения давлений, снятые с кривой поведения давления по времени, в два произвольных момента времени τ1 и τ2 (τ2>τ1).
Полученное с использованием формулы (2) значение коэффициента запаздывания соответствует температуре и давлению воздуха у земли в момент проведения эксперимента. Для пересчета значения λз на фактические значения температуры и давления воздуха на высоте полета Н используют следующую формулу, вытекающую из кинетической теории газов (там же, стр.57):
где λН, ΤН и pН - коэффициент запаздывания, температура и давление воздуха на высоте Н,
Τз и рз - температура и давление воздуха у земли в момент проведения эксперимента.
Из формулы (3) следует, что значение коэффициента запаздывания при любых значениях температуры ΤН и давления рН фактически определяется единственным параметром λз, который представляет собой значение коэффициента запаздывания, приведенного к температуре и давлению воздуха на уровне земли.
Обработка результатов измерения воздушных сигналов в летных испытаниях на ряде маневренных летательных аппаратов показала, что при использовании описанного способа погрешность определения коэффициента запаздывания достигает 30...40% от его фактического значения. Причиной повышенной погрешности является неадекватность условий проведения эксперимента по определению запаздывания при наземных работах и фактических условий полета ЛА в следующих отношениях:
- наземный эксперимент выполняется при равенстве температуры наружного воздуха и температуры воздуха внутри пневмотракта,
- наземный эксперимент выполняется при подаче на вход пневмотракта в момент открывания заборных отверстий ПВД ступенчатого (разрывного по времени) сигнала давления, что не выполняется в реальных условиях полета ЛА,
- наземный эксперимент не отражает аэродинамический аспект, включающий взаимодействие “втекающей-вытекающей” из пневмотракта воздушной струи с набегающим воздушным потоком в зоне расположения заборных отверстий ПВД, что проявляется только в полете ЛА при обтекании ПВД воздушным потоком и дополнительно изменяет параметры воздуха на входе в пневмотракт.
Задачей изобретения является повышение точности определения запаздывания в пневмотракте статического давления.
Задача решается с помощью способа определения запаздывания в пневмотракте статического давления системы воздушных сигналов, в котором в качестве параметра запаздывания определяют коэффициент запаздывания, приведенный к температуре и давлению воздуха на уровне земли, создают перепад давлений между входом и выходом пневмотракта, измеряют давление воздуха на выходе пневмотракта и давление и температуру наружного воздуха и вычисляют значение коэффициента запаздывания, отличающегося тем, что перепад давлений между входом и выходом пневмотракта создают в процессе летных испытаний летательного аппарата при режимах с изменением вертикальной скорости, не более чем за 3 часа до начала летных испытаний путем зондирования атмосферы определяют зависимости температуры и давления воздуха от геометрической высоты, во время полета на упомянутых режимах выполняют синхронные измерения давления, числа Маха, угла атаки, геометрической высоты полета, которые используют для вычисления коэффициента запаздывания.
Упомянутые режимы полета выполняют парами: режим набора высоты и режим снижения, причем каждый из режимов содержит участок перехода от горизонтального полета к полету с определенной вертикальной скоростью, участок полета с этим значением вертикальной скорости и участок перехода к горизонтальному полету.
Как минимум используют хотя бы одну пару упомянутых режимов. При использовании одной пары режимов желательно, чтобы модуль вертикальной скорости, с которой совершается полет на вторых участках режимов, составлял 80-90% от максимально возможной вертикальной скорости летательного аппарата.
Для повышения точности дополнительно используют еще одну пару режимов, причем модуль вертикальной скорости, с которой совершается полет на вторых участках режимов, составляет 40-50% от максимально возможной вертикальной скорости летательного аппарата.
Для многих ситуаций достаточно, что упомянутые пары режимов выполняют в диапазоне высот 10-40% от максимального значения высоты полета летательного аппарата.
Однако для расширения диапазона высот и повышения точности дополнительно выполняют в диапазоне высот 35-65% от максимального значения высоты полета летательного аппарата еще две упомянутые пары режимов полета с достижением вертикальной скорости в одной паре 80-90% и в другой паре 40-50% от максимально возможной вертикальной скорости летательного аппарата.
Для максимального расширения диапазона высот и максимального повышения точности дополнительно выполняют еще две упомянутые пары режимов полета в диапазоне высот 60-90% от максимального значения высоты полета летательного аппарата с достижением вертикальной скорости в одной паре 80-90% и в другой паре 40-50% от максимально возможной вертикальной скорости летательного аппарата.
Предлагаемое изобретение позволяет существенно повысить точность определения коэффициента запаздывания (погрешность не превышает 3-5%).
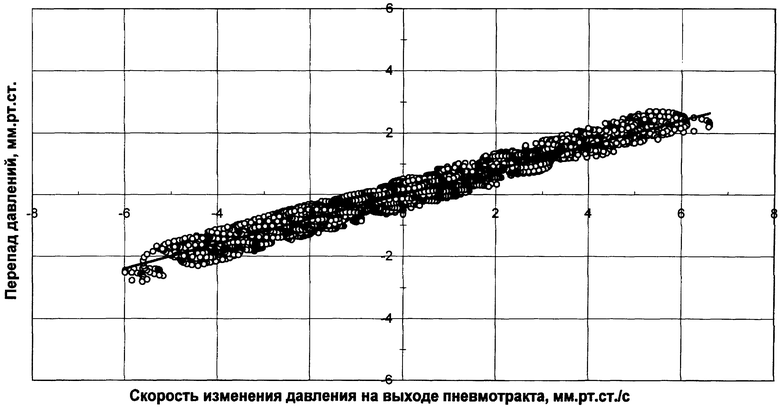
Изобретение поясняется чертежом, на котором изображена полученная при осуществлении предлагаемого способа зависимость скорости изменения давления на выходе пневмотракта от разности давлений на входе и выходе пневмотракта, из которой коэффициент запаздывания может быть определен как тангенс угла наклона прямой, аппроксимирующей эту зависимость.
В предлагаемом способе в качестве исходного уравнения для описания процесса запаздывания используют (по аналогии с уравнением (1) в прототипе) уравнение апериодического процесса с коэффициентом запаздывания λН, зависящим от температуры и давления воздуха, в виде:

где рВХ - давление на входе в пневмотракт (у заборных отверстий ПВД).
В отличие от параметра рНАР в уравнении (1), используемого в прототипе, рВХ в уравнении (4) не является постоянной величиной, его значение определяется статическим (атмосферным) давлением (pН) на текущей высоте полета ЛА, искаженным аэродинамической погрешностью восприятия статического давления ПВД. Виду невозможности непосредственного измерения pВХ в полетных условиях, его значение получают расчетным путем по формуле:

где  - относительная аэродинамическая погрешность восприятия статического давления ПВД, зависящая от числа Маха М и (возможно) от угла атаки α ЛА.
- относительная аэродинамическая погрешность восприятия статического давления ПВД, зависящая от числа Маха М и (возможно) от угла атаки α ЛА.
Метод определения аэродинамических погрешностей в полете ЛА изложен в работе [Котик М.Г., Павлов А.В. и др. Летные испытания самолетов. - М.: Машиностроение, 1968, с.67-71] в терминах определения аэродинамических поправок ПВД, представляющих собой величины, обратные по знаку значениям аэродинамических погрешностей.
Значение коэффициента запаздывания λн в уравнении (4), зависящего от температуры и давления воздуха на текущей высоте полета, выражают через коэффициент запаздывания, приведенный к температуре и давлению на уровне земли по зависимости (3), но вместо параметров ТЗ и рЗ принимают значения температуры и давления на уровне земли по стандартной атмосфере (см. ГОСТ 4401-81 "Стандартная атмосфера. Параметры"):

где Τ0=288,15К, р0=760 мм рт.ст. - температура и давление воздуха на уровне земли по стандартной атмосфере,
λ0 - коэффициент запаздывания в пневмотракте, приведенный к температуре и давлению воздуха на уровне земли по стандартной атмосфере.
С учетом (4), (5) и (6) уравнения для описания процесса запаздывания в пневмотракте можно записать в виде:

Уравнение (7) может быть представлено в следующем виде:

где ΔР(рН, р, М, α) - функция перепада давлений на входе и выходе пневмотракта (правая часть уравнения (7)), причем


 - скорость изменения давления на выходе пневмотракта (выражение, стоящее при λ0 в левой части уравнения (7)).
- скорость изменения давления на выходе пневмотракта (выражение, стоящее при λ0 в левой части уравнения (7)).
Уравнение (8) является исходным уравнением регрессии, по которому определяют λ0 с использованием стандартного метода наименьших квадратов (МНК) по массиву измерений всех параметров, входящих в уравнение.
С использованием приведенных зависимостей предлагается определение коэффициента запаздывания по измерениям, осуществляемым во время летных испытаний ЛА.
Для реализации способа используют бортовую регистрирующую аппаратуру, обеспечивающую формирование и регистрацию единого, синхронизированного по времени кадра информации, включающего параметры СВС (давление (р), число Маха (М), угол атаки (α)), параметры СНС (геометрическая высоты полета ЛА (Нг)). Рекомендуется частота регистрации не менее 4 Гц. В качестве такой аппаратуры подходит комплекс бортовых траекторных измерений (КБТИ).
В качестве параметра запаздывания определяют коэффициент запаздывания, представляющий собой коэффициент пропорциональности между перепадом давлений на входе и выходе пневмотракта и скоростью изменения давления на выходе пневмотракта, приведенный к температуре и давлению воздуха на уровне земли.
При осуществлении способа выполняют следующие действия:
1. Не более чем за 3 часа до начала летных испытаний ЛА выполняют зондирование атмосферы (измерение температуры и давления воздуха на различных высотах), по результатам зондирования определяют зависимости температуры и давления воздуха от геометрической высоты (ТН=FН(НГ) и рН=FР(НГ)).
2. Во время летных испытаний перепад давлений на входе и выходе пневмотракта создают за счет маневрирования ЛА в вертикальной плоскости в широком диапазоне изменения вертикальной скорости ЛА. Во время полета при таких режимах выполняют синхронные измерения давления р (это давление на выходе пневмотракта), числа Маха М, угла атаки α, геометрической высоты полета НГ.
Для определения искомого коэффициента с большей точностью, чем в прототипе, можно использовать любые режимы полета, обеспечивающие изменение вертикальной скорости в возможном для данного ЛА диапазоне. Описанные далее варианты являются удобными для облегчения обработки результатов измерений, а выполнение всей их совокупности значительно повышает точность нахождения коэффициента запаздывания. Каждый последующий из описанных шагов вносит вклад в повышение точности.
2.1. Выполняют пары режимов полета, состоящие из режима набора высоты и режима снижения. Каждый из режимов содержит участок перехода от горизонтального полета к полету с определенной вертикальной скоростью, участок полета с этим значением вертикальной скорости и участок перехода к горизонтальному полету.
2.2. Выполняют хотя бы одну пару таких режимов, причем модуль вертикальной скорости, с которой совершается полет на вторых участках режимов, составляет 80-90% от максимально возможной вертикальной скорости летательного аппарата.
2.3. Выполняют дополнительно еще одну пару таких режимов, причем модуль вертикальной скорости, с которой совершается полет на вторых участках режимов, составляет 40-50% от максимально возможной вертикальной скорости летательного аппарата.
2.4. Описанные режимы выполняют в диапазоне высот 10-40% от максимального значения высоты полета летательного аппарата - на "малых" высотах.
2.5. Такие же режимы повторяют в диапазоне высот 35-65% от максимального значения высоты полета летательного аппарата - на "средних" высотах.
2.6. Такие же режимы повторяют в диапазоне высот 60-90% от максимального значения высоты полета летательного аппарата - на "больших" высотах.
Требования к характеристикам режимов не являются жесткими. Ниже приводится пример планирования эксперимента для условного ЛА, который по своим эксплуатационным характеристикам может совершать маневренный полет в диапазоне высот 0...10000 м, вертикальных скоростей ±100 м/с. Выбирают диапазоны изменения высот, равные для режимов на "малых" высотах 1000...4000 м, на "средних" высотах 3500...6500 м, на "больших" высотах 6000...9000 м. Диапазоны высот выбирают так, чтобы они перекрывались между собой с интервалом перекрытия, равным ~500 м. В каждом из трех указанных диапазонов высот выполняют по четыре следующих режима полета ЛА:
а) набор высоты от Нмин до Нмах (Нмин, Нмах - граничные высоты диапазона), включающий участок горизонтального полета на высоте Нмин в течение 10-15 с, набор высоты до достижения вертикальной скорости 40-50 м/с, набор высоты при постоянной вертикальной скорости из диапазона 40-50 м/с в течение 5-20 с, вывод из набора высоты до достижения нулевых значений вертикальной скорости, горизонтальный полет на высоте Нмах в течение 10-15 с;
б) снижение от Нмах до Нмин, включающее участок горизонтального полета на высоте Нмах в течение 10-15 с, снижение высоты до достижения вертикальной скорости - 40-50 м/с, снижение при постоянной вертикальной скорости из диапазона - 40-50 м/с в течение 5-20 с, вывод из снижения по достижению нулевых значений вертикальной скорости, горизонтальный полет на высоте Нмин в течение 10-15 с;
в) повторение режима а), но с достижением вертикальной скорости 80-90 м/с;
г) повторение режима б), но с достижением вертикальной скорости - 80-90 м/с.
3. Результаты измерений используют для вычисления коэффициента запаздывания. Для этого первоначально формируют массив бортовых измерений параметров р, М, α, Нг для каждого режима отдельно. По массиву измерений давления р вычисляют входящую в уравнение (8) производную  Для дифференцирования используют численные алгоритмы, не обладающие фазовыми искажениями. Указанному условию удовлетворяет, например, "малошумящий" дифференцирующий 9-точечный фильтр Ланцоша, приведенный в работе [Хемминг Р.В. Цифровые фильтры. - М.: Советское радио, 1980, с.115]:
Для дифференцирования используют численные алгоритмы, не обладающие фазовыми искажениями. Указанному условию удовлетворяет, например, "малошумящий" дифференцирующий 9-точечный фильтр Ланцоша, приведенный в работе [Хемминг Р.В. Цифровые фильтры. - М.: Советское радио, 1980, с.115]:

где n - дискретный момент времени, в котором вычисляется производная 
N=9 (количество измерений давления до и после n-го момента времени, необходимых для расчета 
Рn+k - значение давления на выходе пневмотракта в дискретный момент времени n+k,
k - индекс суммирования.
Необходимо учесть, что выражение (11) приведено в нормированном виде, соответствующем регистрации параметров через интервал времени, равный одной секунде. Его модификация для произвольного интервала времени регистрации параметров имеет вид:

где Т - интервал времени регистрации параметров в секундах.
Далее последовательно вычисляют массивы значений
- относительной аэродинамической погрешности 
- температуры и давления наружного воздуха по зависимостям Тн=Fн(Нг) и pH=FP(HГ),
- функций ΔР(рн, р, М, α) и  входящих в уравнение (8) в соответствии с выражениями (9) и (10).
входящих в уравнение (8) в соответствии с выражениями (9) и (10).
Массивы значений функций ΔP(pн,p, Μ, α) и  сформированных для каждого режима, объединяют в единый массив данных и с использованием уравнения (8) вычисляют значение λ0 стандартным методом наименьших квадратов.
сформированных для каждого режима, объединяют в единый массив данных и с использованием уравнения (8) вычисляют значение λ0 стандартным методом наименьших квадратов.
Пересчет полученного значения λ0 для фактических значений температуры и давления воздуха на текущей высоте полета ЛА выполняют по выражению (6).
Результаты применения предлагаемого метода показаны на чертеже, где по оси ординат отложена функция перепада давлений ΔР(рн, р, М, α), а по оси абсцисс - скорость изменения давления на выходе пневмотракта (функция  ).
).
Искомым значением λ0 является тангенс угла наклона аппроксимирующей линейной зависимости, которая для случая, иллюстрируемого чертежом, равно 0,40 с.
Изобретение относится к авиации и позволяет повысить точность определения воздушных параметров, зависящих от статического давления. Сущность: создают перепад давлений между входом и выходом пневмотракта, измеряют давление воздуха на его выходе и давление и температуру наружного воздуха. При этом перепад давлений создают на режимах полета с изменением вертикальной скорости. Не более чем за 3 часа до полета зондированием атмосферы определяют зависимости температуры и давления воздуха от геометрической высоты в полете выполняют синхронные измерения давления, числа Маха, угла атаки, геометрической высоты полета, вычисляют коэффициент запаздывания. Парные режимы полета (набор высоты и снижение) содержат переход от горизонтального полета к полету с постоянной вертикальной скоростью, полет с такой скоростью и переход к горизонтальному полету. Модуль вертикальной скорости достигает 80-90% или 40-50% от максимально возможного для летательного аппарата значения. Режимы выполняют в диапазонах высот 10-40%, 35-65% и 60-90% от максимального значения для летательного аппарата. Технический результат изобретения заключается в повышении точности определения запаздывания в пневмотракте статического давления. 6 з.п. ф-лы, 1 ил.
| КОТИК М.Г., ПАВЛОВ А.В | |||
| и др | |||
| Летные испытания самолетов | |||
| - М.: Машиностроение, 1968, с.55-59 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ ПРИЕМНИКОВ ВОЗДУШНЫХ ДАВЛЕНИЙ В ЛЕТНЫХ ИСПЫТАНИЯХ САМОЛЕТА | 1999 |
|
RU2177624C2 |
| СПОСОБ КОНТРОЛЯ ИЗМЕРИТЕЛЯ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079142C1 |

