Изобретение относится к измерительной технике, в частности к навигационным гироскопическим приборам, и может найти применение в инерциальных системах подвижных объектов, в автопилотах авиа- и судомоделей и в системах безопасности транспортных средств.
Известен бесплатформенный инерциальный блок, содержащий основание, гироскопы-акселерометры, установленные на его базовых плоскостях, сервисные электронные блоки, источники постоянного и переменного токов. В качестве гироскопов-акселерометров в указанном устройстве использованы гироскопы-акселерометры с электростатическим подвесом сферического ротора (см. "Aviation Week", 1970, v. 92, N 6, pp. 51-55). Недостатками известного бесплатформенного инерциального измерительного блока являются его значительные массогабаритные характеристики, а также сложность выставки и определения привязки осей чувствительности гироскопов - акселерометров к основанию блока.
Наиболее близким аналогом к предлагаемому изобретению является бесплатформенный инерциальный измерительный блок, в котором в качестве гироскопов-акселерометров применены микромеханические вибрационные гироскопы - акселерометры, содержащие чувствительные элементы, электроды возбуждения колебаний чувствительных элементов и электроды съема информации, при этом основание блока выполнено в виде параллелепипеда с базовыми плоскостями по его граням и внутренней полостью, электроды возбуждения колебаний чувствительных элементов и электроды съема информации выполнены непосредственно на основании, а основание закреплено на подложке, содержащей микросборки сервисной электроники, в полости основания размещен источник постоянного тока, а на одной из плоскостей основания установлен датчик температуры (см. патент РФ N 2058534, МКИ G 01 С 21/00, 1993).
Недостатками данного бесплатформенного инерциального блока являются ограничения по количеству используемых гироскопов-акселерометров тремя. Оси чувствительности гироскопов направлены перпендикулярно базовым плоскостям основания параллелепипеда, в связи с чем отсутствует возможность резервирования датчиков параметров навигации, а устранение этих недостатков средствами прототипа ведет к увеличению габаритов блока и уменьшению точности и надежности измерений.
Техническим результатом предлагаемого изобретения является уменьшение массогабаритных характеристик при резервировании датчиков, упрощение обеспечения привязки осей чувствительности гироскопов-акселерометров, а также повышение надежности работы бесплатформенного инерциального блока за счет увеличения вероятности обнаружения и идентификации отказов при одновременном повышении точности измерений.
Указанный технический результат достигается тем, что в известном бесплатформенном инерциальном измерительном блоке, содержащем микромеханические вибрационные гироскопы-акселерометры с электродами возбуждения колебаний и съема информации с чувствительных элементов и датчик температуры, размещенные на основании, закрепленном на подложке, на которой установлены микросборки сервисной электроники, в соответствии с изобретательским замыслом, подложка выполнена в виде двухсторонней платы из диэлектрика, а основание - в виде правильной шестиугольной усеченной пирамиды, на боковых гранях которой, по меньшей мере, на трех, размещены чувствительные элементы микромеханических вибрационных гироскопов-акселерометров, а на меньшей торцевой грани - датчик температуры, при этом основание по плоскости большей торцевой грани закреплено в центральной части подложки, а микросборки сервисной электроники установлены вокруг основания по периферии подложки и выполнены по тонкопленочной технологии.
Кроме того, подложка может быть размещена в защитном корпусе с двусторонней разводкой выводов микросборок сервисной электроники в плоскости, параллельной плоскости большей торцевой грани основания.
Кроме того, пирамида основания может быть выполнена с углом наклона плоскостей боковых граней к плоскости большей торцевой грани в диапазоне от 54,76-0,5o до 54,76+0,5o.
Такое выполнение устройства позволяет создать гибридную интегральную микросхему блока чувствительных элементов с использованием двусторонней платы из диэлектрика, безкорпусных и корпусных элементов и дополнительно разместить в ее составе регуляторы напряжения датчиков углов и момента и синхронные детекторы по каналам акселерометров. При этом обеспечена возможность использования методов резервирования чувствительных элементов, т.е. увеличение числа чувствительных элементов гироскопов-акселерометров (до шести) практически без увеличения массогабаритных характеристик блока благодаря применению шестиугольной конструкции основания-пирамиды и использованию тонкопленочной технологии. Бесплатформенный инерциальный блок обеспечивает измерение проекций вектора абсолютной угловой скорости и кажущегося ускорения подвижного объекта на измерительные оси приборной системы координат с высокой надежностью при использовании идентификации отказов и осреднения сигналов измерения с большого количества измерителей.
На фиг. 1 представлен общий вид бесплатформенного инерциального измерительного блока;
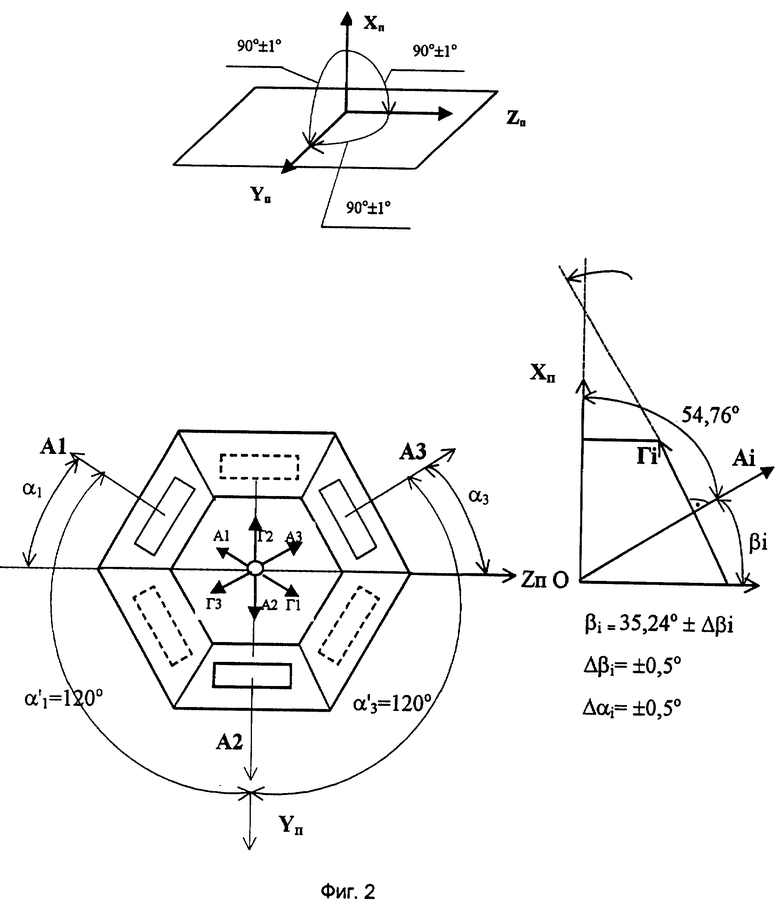
На фиг. 2 представлена конфигурация основания;
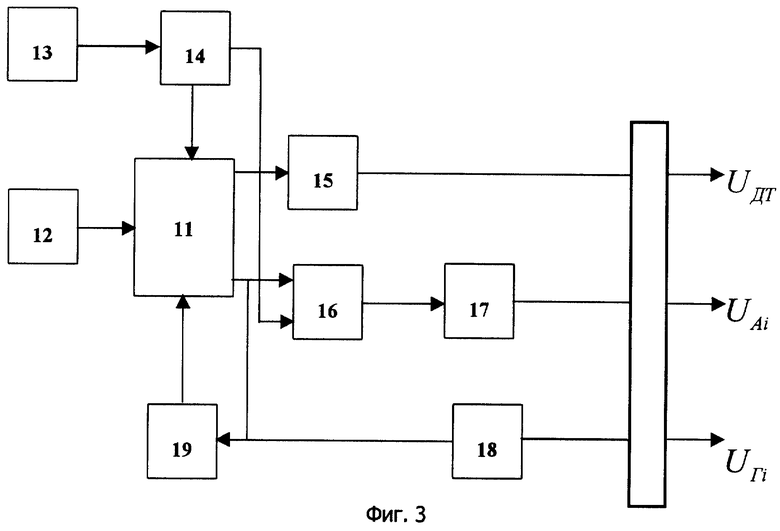
На фиг. 3 представлена структурная схема обработки информации с бесплатформенного инерциального измерительного блока.
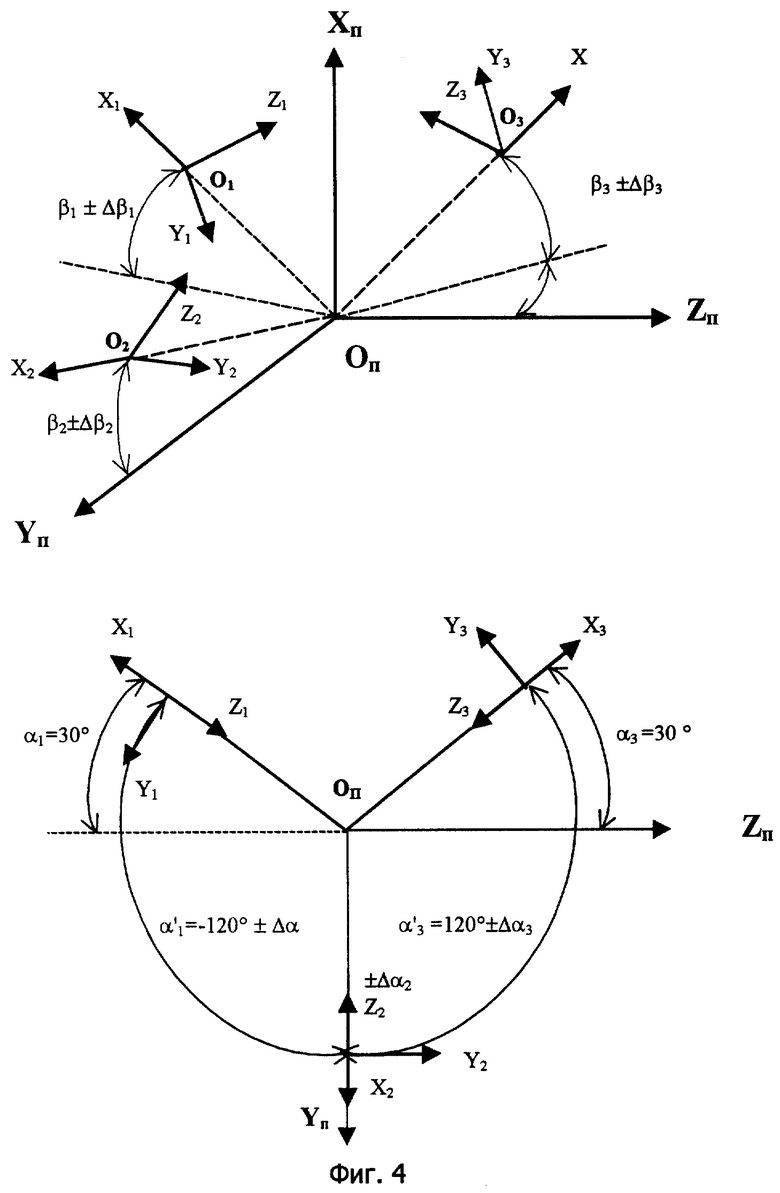
На фиг. 4 представлено положение осей чувствительности акселерометров (гироскопов) в приборной системе координат OXПYПZП (для 3-х ЧЭ).
Бесплатформенный инерциальный измерительный блок (Фиг. 1, 2) содержит стеклотекстолитовую подложку 1, в центре которой размещено основание 2 в виде шестиугольной усеченной пирамиды, на боковых гранях которой установлены чувствительные элементы 3 (до шести элементов) микромеханических вибрационных гироскопов-акселерометров, ориентированных друг относительно друга таким образом, что оси чувствительности каждой тройки акселерометров и гироскопов, расположенных через одну грань, образуют правую ортогональную систему координат, на вершине пирамиды установлен датчик температуры 4 для компенсации температурных погрешностей на основе безкорпусного транзистора, а вокруг основания размещены безкорпусные операционные усилители 5, совместно с конденсаторами и сопротивлениями реализующие интегрирующие предварительные усилители, регуляторы напряжения 6 емкостного датчика угла и датчика момента, реализованные на стандартных операционных усилителях AD-853 2 AR, фазочувствительные выпрямители 7 емкостного датчика угла по каналу акселерометров, реализованные на стандартных ключах ADG453BR и операционных усилителях 8. При этом плата подложки 1 выполнена по тонкопленочной технологии с двусторонней разводкой и установлена в защитный стандартный корпус с выводами 10 электрической схемы, образованной указанными выше безкорпусными, корпусными и другими интегральными микросхемами серий 140, 590 и 555. Используемый в блоке каждый микромеханический вибрационный гироскоп-акселерометр выдает информацию о проекции линейного ускорения и угловой скорости, при этом оси чувствительности акселерометра и гироскопа конструктивно взаимно перпендикулярны.
Структурная схема обработки информации (фиг. 3) с бесплатформенного инерциального измерительного блока 11 (А1) содержит генератор датчиков угла 12 (ГДУ), генератор системы возбуждения 13 (ГСВ), блок регуляторов напряжения системы возбуждения 14 (БРСВ), усилитель датчика температуры 15 (УДТ), блок синхронных детекторов 16 (БСД), блок фильтров гироскопов 17 (БФГ), блок фильтров акселерометров 18 (БФА) и блок регуляторов добротности 19 (БРД).
Работа бесплатформенного инерциального измерительного блока осуществляется следующим образом. При движении объекта каждый из акселерометров (гироскопов) измеряет соответствующую проекцию линейного ускорения объекта (угловой скорости) на ось чувствительности.
Для каждой тройки чувствительных элементов, расположенных через одну грань, конструктивно углы αi (i = 1, 2, 3) между проекциями осей чувствительности акселерометров (гироскопов) в установочной плоскости равны 120o. Для первой тройки проекция оси чувствительности акселерометра А2 совпадает с приборной осью OПYП (Фиг. 2).
Углы наклона плоскостей боковых граней пирамиды к плоскости торцевой грани основания (90o - βi ) выбраны равными 54,76o, что обеспечивает ортогональность осей чувствительности тройки акселерометров (гироскопов), расположенных на гранях усеченной пирамиды через одну грань.
Матрицы ориентации осей чувствительности тройки акселерометров (BА) и гироскопов (Bг) при α1= α3 = 30o α2 = 0 имеют вид: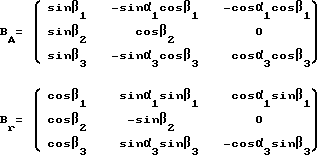
Условием ортогональности осей чувствительности является равенство |B| = 1, где В - определитель матрицы ориентации. При β1= β2= β3= β условие ортогональности осей чувствительности примет вид: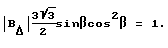
Решение этого уравнения в диапазоне углов 0 < β < 90o дает β = 35,24o, что соответствует углу наклона боковой грани пирамиды βi = 54,76o±0,5o.
Использование избыточного числа чувствительных элементов при выбранной схеме их размещения на основании (пирамиде) позволяет повысить точность измерения в 1,4 раза, а также обеспечить высокую надежность измерения.
Реализация технического результата, полученного от использования предлагаемого изобретения, в конкретной конструкции обеспечила создание бесплатформенного инерциального измерительного блока с избыточным количеством чувствительных элементов массой 50 -70 г и энергопотреблением не более 1,5 Вт.
Таким образом, предлагаемое устройство по сравнению с известными того же назначения позволяет обеспечить необходимый технический результат, заключающийся в существенном уменьшении массогабаритных характеристик и упрощении обеспечения привязки осей чувствительности гироскопов-акселерометров, а также повышении надежности работы бесплатформенного инерциального блока за счет увеличения вероятности обнаружения и идентификации отказов при одновременном повышении точности измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ | 2000 |
|
RU2162230C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2000 |
|
RU2162229C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| БОРТОВОЕ УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2011 |
|
RU2480834C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ УКЛОНОВ | 2000 |
|
RU2166732C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 1993 |
|
RU2064682C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| Бесплатформенный инерциальный измерительный блок | 2023 |
|
RU2797150C1 |
Изобретение относится к измерительной технике, в частности к навигационным гироскопическим приборам, и может найти применение в инерциальных системах подвижных объектов, в автопилотах авиа- и судомоделей и в системах безопасности транспортных средств. Блок содержит микромеханические вибрационные гироскопы-акселерометры с электродами возбуждения колебаний и съема информации с чувствительных элементов и датчик температуры, размещенные на основании, закрепленном на подложке. Подложка выполнена в виде двусторонней платы из диэлектрика, а основание - в виде правильной шестиугольной усеченной пирамиды, по меньшей мере на трех боковых гранях которой размещены чувствительные элементы гироскопов-акселерометров, а на меньшей торцевой грани - датчик температуры. Основание по плоскости большей торцевой грани закреплено в центральной части подложки, а микросборки сервисной электроники установлены вокруг основания по периферии подложки и выполнены по тонкопленочной технологии. Обеспечивается существенное уменьшение массогабаритных характеристик и упрощение обеспечения привязки осей чувствительности гироскопов-акселерометров к основанию блока, а также повышение надежности в работе за счет увеличения вероятности обнаружения и идентификации отказов при одновременном повышении точности измерений. 2 з.п. ф-лы, 4 ил.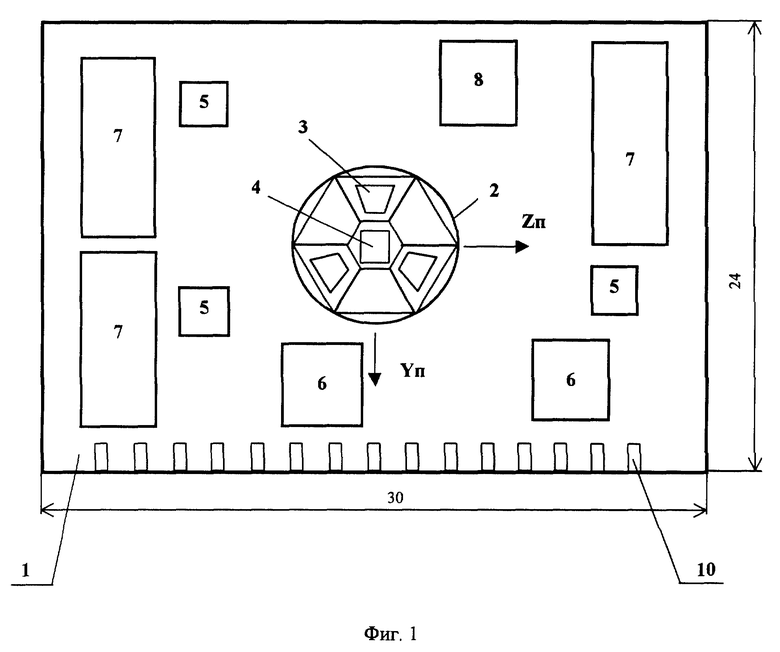
| RU 2058534 C1, 20.04.1996 | |||
| ГИРОПРИБОР | 1993 |
|
RU2082097C1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ИНДЕЙКА В СЛИВОЧНОМ СОУСЕ С ГОРОШКОМ" | 2006 |
|
RU2315499C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1990 |
|
RU2011169C1 |
| ЦИФРОВАЯ МАШИНА ДЛЯ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ | 0 |
|
SU210492A1 |
