1. Область техники, к которой относится изобретение
Изобретение относится к области навигации и управления подвижными объектами, а именно к инерциальным измерительным модулям (ИИМ) - устройствам измерения абсолютной угловой скорости и линейного ускорения подвижных объектов и используется в бесплатформенных инерциальных навигационных системах (БИНС). Миниатюризация подвижных объектов ставит перед разработчиками БИНС задачу: уменьшение массо-габаритных характеристик и стоимости ИИМ.
2. Уровень техники
Рассмотрим аналоги предлагаемого изобретения.
2.1 Библиографические данные аналогов изобретения
[1] Микросистемы ориентации беспилотных летательных аппаратов / под. ред. В.Я. Распопова. - М.: Машиностроение 2011 стр. 61.
[2] БЕЗПЛАТФОРМНА IНЕРЦIАЛЬНА НАВIГАЦIЙНА СИСТЕМА НА OCHOBI ДИНАМIЧНО НАСТРОЄНИХ ГIРОСКОПIВ. Авторы О.М. Сапегiн, М.О. Романов, Д.В. Бугайов. Hayковi вicтi НТУУ "КПI" 2016 / 6 стр. 94
Интернет-ресурс http://bulletin.kpi.ua/article/view/81064
2.2 Известны ИИМ [1], состоящие из трех гироскопических датчиков угловой скорости (ДУС) и трех измерителей линейного ускорения (акселерометров) с взаимноортогональными измерительными осями. ИИМ, построенные по описанной схеме, включают в себя 6 чувствительных элементов (ЧЭ) двух типов, измеряющих три проекции абсолютной угловой скорости и три проекции линейного ускорения подвижного объекта. Эти 6 компонентов движения подвижного объекта используются для решения навигационной задачи в БИНС. Недостатками данного измерителя являются значительные габариты, масса и стоимость.
ИИМ БИНС [2], взятый за прототип, состоит из пяти ЧЭ: двух динамически настраиваемых гироскопов (ДНГ) и трех акселерометров. Сокращение числа ЧЭ с шести до пяти дает уменьшение массы и габаритов ИИМ до 70-80% по сравнению с классической схемой с сохранением точностных характеристик, однако этого не достаточно для применения данной схемы в малогабаритных БИНС.
3 Раскрытие изобретения
3.1 Техническим результатом предлагаемого изобретения является уменьшение массы, габаритов и стоимости ИИМ.
Технический результат достигается совокупностью существенных признаков:
- уменьшением числа ЧЭ с пяти до трех;
- уменьшением числа типов ЧЭ с двух до одного.
При этом сохраняется способность ИИМ измерять все 6 компонентов движения подвижного объекта: три проекции абсолютной угловой скорости и три проекции линейного ускорения.
Сущность изобретения заключается в использовании чувствительности ДНГ к линейному ускорению при наличии смещения центра масс его маховика относительно центра упругого подвеса (точки пересечения его осей).
3.2 При наличии смещения центра масс маховика относительно центра подвеса ДНГ в выходных сигналах его измерительных каналов будут присутствовать составляющие, обусловленные как угловой скоростью основания, так и его линейным ускорением. Выходные сигналы в виде тока в цепях датчика момента (ДМ) ДНГ, имеющего смещение центра масс ротора относительно центра подвеса, при воздействии на него угловой скорости и линейного ускорения можно записать:
где I1, I2 - токи в цепях ДМ 1-го и 2-го измерительного канала ДНГ;
I10, I20 - нулевой сигнал 1-го и 2-го канала ДНГ (составляющая, не зависящая от ускорения);
k1, k2 - коэффициенты передачи 1-го и 2-го измерительного канала ДНГ по угловой скорости;
ω1, ω2 - проекции абсолютной угловой скорости, действующей вдоль 1-й и 2-й осей чувствительности ДНГ;
p1, р2 - коэффициенты передачи 1-го и 2-го измерительных каналов по линейному ускорению, обусловленные специально созданной маятниковостью ротора относительно оси упругого подвеса;
а1, а2 - проекции линейного ускорения, действующего вдоль 1-й и 2-й осей чувствительности ДНГ.
В формуле (1)

где m - кинетический момент ротора ДНГ;
Кдм1 и Кдм2 - коэффициенты передачи ДМ 1-го и 2-го канала;

где m - масса ротора ДНГ;
l - маятниковость (смещение центра масс ротора относительно центра упругого подвеса).
В 2-х уравнениях (1) присутствуют 4 неизвестные: ω1, ω2, a1, а2. Поэтому разделить информацию о проекциях угловой скорости и линейного ускорения, имея 2 уравнения, описывающие выходные сигналы 2-х измерительных каналов одного ДНГ, невозможно.
Заявляемое изобретение направлено на решение задачи извлечения информации об угловой скорости и линейном ускорении объекта из выходных сигналов 3-х ДНГ, центры масс маховиков которых смещены относительно центра упругого подвеса на определенную величину.
Для решения этой задачи три ДНГ со смещенными центрами масс ротора относительно центра упругого подвеса располагают так, чтобы шесть их осей чувствительности были попарно параллельны осям системы координат, связанной с подвижным объектом, а извлечение информации об угловой скорости и линейном ускорении объекта из выходных сигналов ДНГ производят по специальному алгоритму в счетно-решающем устройстве.
Решение этой задачи позволяет исключить из состава ИИМ 3 акселерометра, получив полную информацию о движении объекта по выходным сигналам 3-х ДНГ, что уменьшает массу, габариты и стоимость измерительного модуля за счет уменьшения числа ЧЭ с пяти (два ДНГ и три акселерометра в прототипе) до трех ДНГ и уменьшения типов ЧЭ с двух (гироскопы и акселерометры) до одного (только однотипные гироскопы).
3.3 Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [2]: два динамически настраиваемых гироскопа в составе инерциального измерительного модуля. Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа: добавлен третий ДНГ, центры масс маховиков ДНГ смещены относительно центров их упругих подвесов на определенную величину вдоль оси вращения гироскопов.
4 Краткое описание чертежей
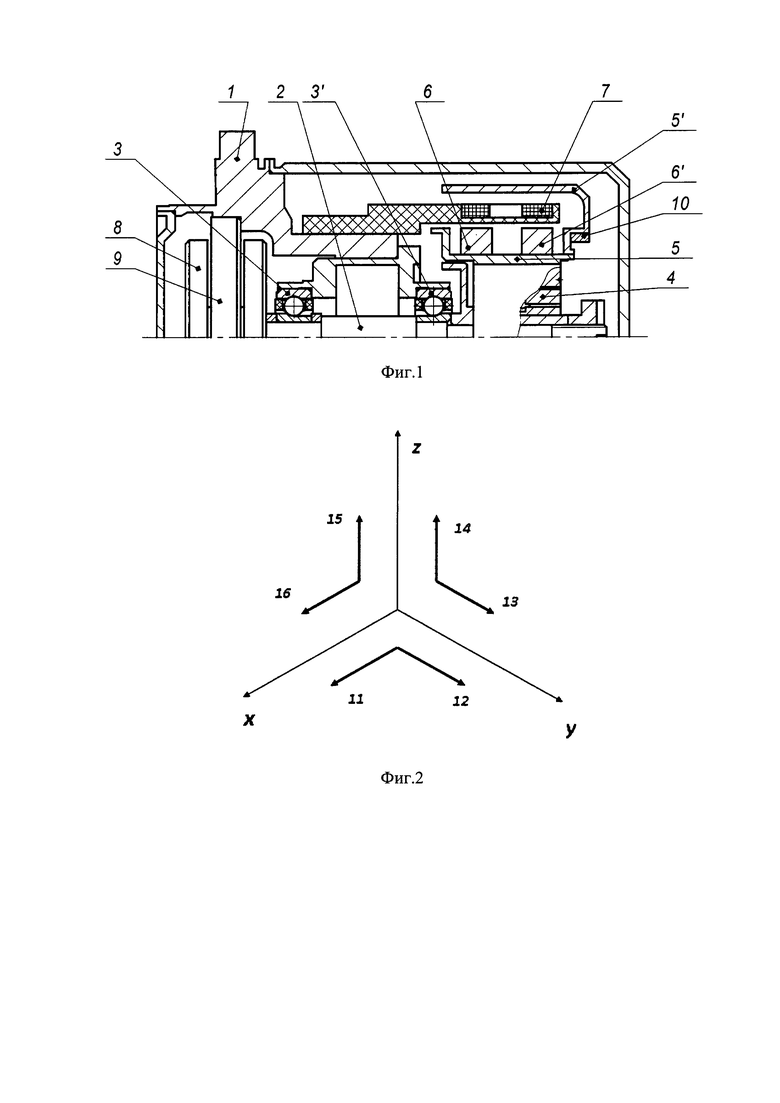
На фиг. 1 представлен разрез ДНГ со смещенным центром масс ротора относительно центра подвеса.
На фиг. 2 представлена схема расположения осей чувствительности ДНГ в составе ИИМ относительно осей х, у, z, связанных с основанием ИИМ.
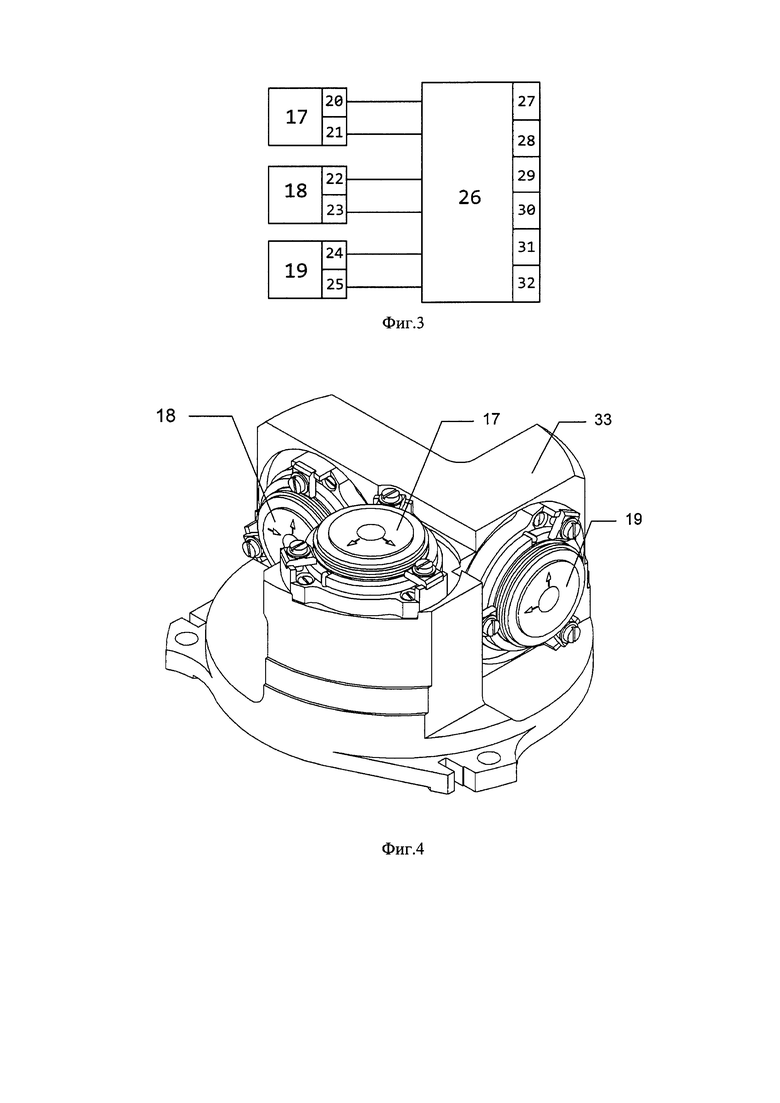
На фиг. 3 представлена блок-схема заявляемого устройства.
На фиг. 4 представлен внешний вид ИИМ, показывающий расположение ДНГ на общем основании. Стрелками на корпусе каждого ДНГ показаны направления осей чувствительности.
5 Осуществление изобретения
5.1 Как и в прототипе, ДНГ, входящие в состав ИИМ, состоят из корпуса 1 (фиг. 1), вала 2, установленного в корпус на подшипниках 3 и 3', упругого подвеса 4, обеспечивающего маховику гироскопа две степени свободы относительно вала, маховика гироскопа, являющегося ротором ДМ и состоящего из магнитопроводов 5, 5' и магнитов 6 и 6', статора ДМ 7, приводного двигателя, состоящего из ротора 8 и статора 9. В отличие от прототипа, в конструкцию введен груз 10 в виде втулки, прикрепленной к маховику гироскопа и создающего маятниковость ротора относительно центра подвеса. Маятниковость можно обеспечить утолщением торцевой стенки магнитопровода 5 или 5', либо перемещением маховика гироскопа на упругом подвесе относительно сбалансированного положения. Для работы устройства необходимо обеспечивать смещение центра масс ротора относительно центра подвеса на 0,1…1 мм.
Как и в прототипе, в состав ИММ входят два ДНГ, расположенные на общем основании. Первая ось чувствительности первого ДНГ 11 (фиг. 2) направлена по оси х ИИМ, вторая ось чувствительности 12 первого ДНГ направлена по оси у ИИМ, первая ось чувствительности второго ДНГ 13 направлена по оси у ИИМ, вторая ось чувствительности 14 второго ДНГ направлена по оси z ИИМ. В отличие от прототипа, в состав ИИМ введен третий ДНГ, первая ось чувствительности третьего ДНГ 15 направлена по оси z ИИМ, вторая ось чувствительности 16 третьего ДНГ направлена по оси х ИИМ.
ДНГ 17, 18 и 19 (фиг. 3) имеют выходы 20…25, соответствующие осям чувствительности 11…16. Выходы ДНГ соединены с электронно-преобразующим устройством 26, в котором аналоговые сигналы, представляющие собой ток в цепях ДМ ДНГ, преобразуются в цифровой код и производится вычисление проекций абсолютной угловой скорости и линейного ускорения по специальному алгоритму. Информация о трех проекциях абсолютной угловой скорости и трех проекциях линейного ускорения формируется на выходах 27...32 электронно-преобразующего устройства.
Как и в прототипе, ДНГ установлены на общее основание 33 (фиг. 4). В отличие от прототипа, благодаря введению в конструкцию третьего ДНГ и исключению из состава ИММ акселерометров, габариты предложенного ИИМ составили 67×108×108 мм, что по объему, а следовательно и по массе, более чем в 3 раза меньше прототипа при сравнимых габаритах ДНГ.
5.2 Измерение угловых скоростей и линейных ускорений при помощи предлагаемого устройства происходит следующим образом. Маховик каждого гироскопа приводится во вращение приводным двигателем на рабочей скорости. После замыкания обратной связи по моменту при воздействии на ИИМ абсолютной угловой скорости и линейного ускорения на выходах 20…25 ДНГ формируются сигналы в виде тока в цепях ДМ каждого ДНГ в соответствии с выражениями:
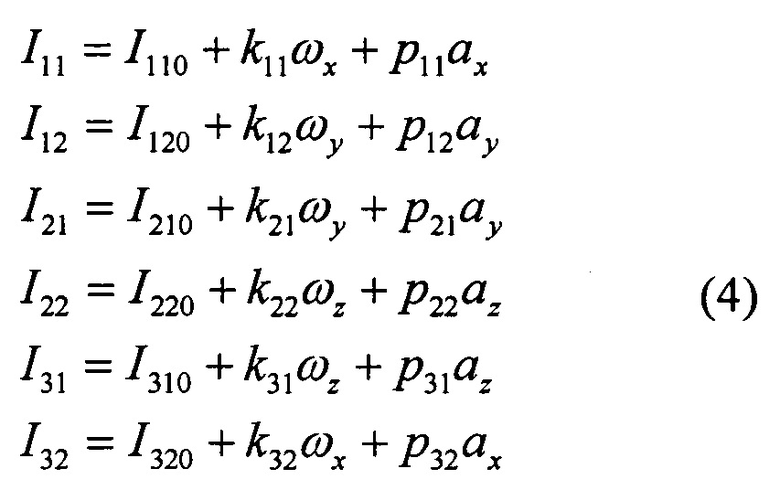
где Iij - токи в цепях ДМ i-го ДНГ по j-й измерительной оси;
Iij0 - нулевые сигналы i-го ДНГ по j-й измерительной оси (составляющие, не зависящие от ускорения);
kij - коэффициенты передачи по угловой скорости i-го ДНГ по j-й измерительной оси;
pij - коэффициенты передачи по линейному ускорению i-го ДНГ по j-й измерительной оси;
ωх, ωy, ωz - проекции абсолютной угловой скорости на оси х, у, z, связанные с основанием ИИМ;
ах, ау, az - проекции линейного ускорения на оси х, у, z, связанные с основанием ИИМ,
коэффициенты Iij0, kij, рij определяются при калибровках ИИМ на этапе его изготовления и записываются а память электронно-преобразующего устройства.
Значения токов Iij на выходах ДНГ 20…25 преобразуются в цифровой код с частотой, необходимой для решения навигационной задачи, и на каждом цикле преобразования производится решение системы уравнений (4) известными математическими способами относительно проекций ωх, ωу, ωz, ах, ау, аz, значения которых передаются на выходы 27…32 электронно-преобразующего устройства и используются в БИНС подвижного объекта для решения навигационной задачи.
Таким образом, использование в ИИМ трех ДНГ со смещенным центром масс ротора относительно центра подвеса позволяет решить задачу определения проекций абсолютной угловой скорости и линейного ускорения без применения акселерометров, что уменьшает стоимость и более чем в 3 раза снижает габариты и массу ИИМ по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2243569C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ВЕДОМОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ ЭТАЛОННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2505785C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2002 |
|
RU2235976C2 |
Изобретение относится к области навигации и может быть использовано в бесплатформенных инерциальных навигационных системах (БИНС). Инерциальный измерительный модуль (ИИМ) состоит из трех динамически настраиваемых гироскопов (ДНГ), центры масс роторов которых смещены относительно центра упругого подвеса, благодаря чему гироскопы становятся чувствительными к линейному ускорению основания. Выходы ДНГ соединены с вычислительным устройством, осуществляющим выделение из сигналов ДНГ информации о проекциях абсолютной угловой скорости и линейного ускорения, действующего на объект, путем нахождения корней системы шести уравнений на каждом шаге решения навигационной задачи. В устройстве отсутствуют акселерометры, что позволяет уменьшить массу, габариты БИНС. 4 ил.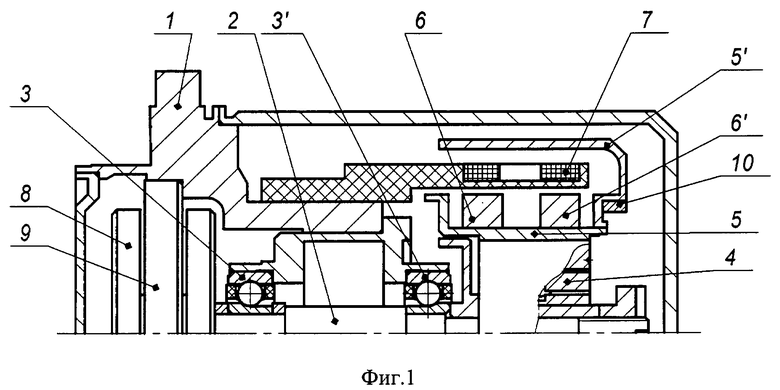
Инерциальный измерительный модуль (ИИМ), включающий динамически настраиваемые гироскопы с двумя ортогональными осями чувствительности каждый, содержащие приводной двигатель, вал, упругий подвес, маховик, датчик момента (ДМ), гироскопы установлены на основание, первая ось чувствительности первого гироскопа направлена по первой из трех взаимноортогональных осей, связанных с основанием, вторая ось чувствительности первого гироскопа направлена по второй оси основания, первая ось чувствительности второго гироскопа направлена по второй оси основания, вторая ось чувствительности второго гироскопа направлена по третьей оси основания, отличающийся тем, что в состав ИИМ введен третий гироскоп, первая ось чувствительности которого направлена по третьей оси основания, вторая ось чувствительности направлена по первой оси основания, центры масс маховиков гироскопов смещены относительно центров подвеса вдоль оси вращения двигателя гироскопа, выходы ДНГ соединены с входом электронно-преобразующего устройства с возможностью синхронного преобразования выходных сигналов ДНГ в виде тока в цепи ДМ в цифровой код и нахождения корней системы уравнений
I11=I110+k11ωx+р11аx
I12=I120+k12ωy+p12ay
I21=I210+k21ωy+p21ay
I22=I220+k22ωy+p22az
I31=I310+k31ωz+p31аz
I32=I320+k32ωz+p32аx
на каждом шаге решения навигационной задачи,
где Iij - токи в цепях ДМ i-го ДНГ по j-й измерительной оси;
Iij0 - нулевые сигналы i-го ДНГ по j-й измерительной оси (составляющие, не зависящие от ускорения);
kij - коэффициенты передачи по угловой скорости i-го ДНГ по j-й измерительной оси;
pij - коэффициенты передачи по линейному ускорению i-го ДНГ по j-й измерительной оси;
ωх, ωy, ωz - корни системы уравнений, искомые проекции абсолютной угловой скорости на оси х, у, z, связанные с основанием ИИМ;
ах, ау, аz - корни системы уравнений, искомые проекции линейного ускорения на оси х, у, z, связанные с основанием ИИМ.
| Сапегiн О.М | |||
| и др | |||
| БЕЗПЛАТФОРМНА IНЕРЦIАЛЬНА НАВIГАЦIЙНА СИСТЕМА НА ОСНОВI ДИНАМIЧНО НАСТРО∈НИХ ГIРОСКОПIВ | |||
| НТУУ "Киïвський полiтехнiчний iнститут iменi Iгоря Сiкорського", Киïв, Украïна | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Стр | |||
| Экономайзер | 0 |
|
SU94A1 |
| Гладильная машина для штучных тканых изделий, например платков | 1959 |
|
SU129625A1 |
| Электрическое устройство для перевода трамвайного вагона с одного пути на другой из самого движущегося вагона | 1929 |
|
SU34009A1 |
| CN 102778232 A, 14.11.2012. | |||

