Изобретение относится к области гидроакустики и может быть использовано при проектировании и разработке систем активной гидролокации.
Известна навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО) по патенту РФ №2225991 от 24.12.2001 г. Станция реализует следующую последовательность операций: излучение сигнала, прием эхосигнала, предварительную обработку, измерение параметров эхосигнала, определение классификационных признаков, измерение скорости звука, прослушивание сигнала шумоизлучения, классификацию целей по измеренным классификационным признакам и отображение на индикаторе.
Недостатком этого технического решения является то, что измерение параметров и принятие решения производится оператором по виду отображаемых отметок на яркостном индикаторе и это может приводить к ошибкам, связанным с его квалификацией и психологическими особенностями.
Известен гидролокационный способ обнаружения подводных объектов в контролируемой акватории по патенту РФ №2242021 от 15.07.2002, содержащий облучение водного пространства, прием эхосигналов, фильтрацию и отображение на экране двух координатного индикатора, который формирует трассы, образованные яркостными отметками и по наклону трасс производит классификацию объектов.
Недостатком данного технического предложения является отсутствие автоматического обнаружения объектов и измерения параметров эхосигнала по визуальному отображению временных реализаций эхосигнала.
Известен способ обработки гидролокационной информации по патенту РФ №2529441 от 03.06.2013, содержащий излучение сигнала, прием отраженного эхосигнала, формирование веера статических характеристик направленности, цифровую многоканальную обработку, отображение на индикаторе в яркостном виде всего массива обработки, определение порога, пороговое обнаружение эхосигнала, определение эхосигналов превысивших порог по всей шкале дистанции, формирование строба по каждому обнаружению, автоматическое определение классификационных признаков по каждому обнаружению, формирование банка классификации по каждой обнаруженной цели, и отображение на индикаторе табло результатов классификации.
Недостатком данного способа является то, что оператору не предоставляется визуальная временная реализация эхосигналов, принадлежащих цели, выбранной для классификации. Как правило, оператору предоставляется отображение от всех целей в виде ярких точек, разной интенсивности по всем пространственным каналам и по всей шкале дальности на индикаторе обнаружения и оператор должен выбрать цель по виду яркостной отметки
Наиболее близким аналогом заявленного предложения является способ, реализованный системой автоматического обнаружения и классификации гидролокатора ближнего действия по патенту РФ №2626295 от 08 09 2016.
Система автоматического обнаружения и классификации, содержит последовательно соединенные антенну, коммутатор приема передачи, приемное устройство со статическим веером характеристик направленности, процессор цифровой многоканальной обработки, процессор классификации, процессор цифровой многоканальной обработки, последовательно соединенные блок выбора временных интервалов отсчетов по последовательным пространственным каналам для обработки за весь интервал приема, блок определения коэффициента корреляции между последовательными временными интервалами соседних пространственных каналов, блок выбора последовательных временных интервалов между пространственными каналами с коэффициентом корреляции (КК) больше 0,5, блок определения амплитуд временных отсчетов выбранных временных интервалов, блок выбора максимальных амплитуду во временных интервалах с коэффициентом корреляции больше 0,5, блок идентификации интервалов с КК>05 по общему времени и блок формирования банка обнаруженных объектов.
Процесс обнаружения и классификации посредством указанной системы содержит следующую последовательность операций: излучение зондирующего сигнала, прием эхосигнала статическим веером характеристик направленности гидроакустической антенны, многоканальную цифровую обработку набора последовательных временных реализаций по пространственным каналам, определение коэффициента корреляции между отсчетами временных интервалов, выбор временных интервалов между пространственными каналами с коэффициентом корреляции больше 0,5, определение амплитуды временных отсчетов выбранных временных интервалов, выбор отсчетов с максимальной амплитудой во временных интервалах с коэффициентом корреляции больше 0,5, идентификацию интервалов с КК>05 по общему времени и формирование банка обнаруженных объектов.
Недостатком данного способа является то, что оператору предоставляется плоская визуальная картина отображения эхосигналов в яркостном виде, что не обеспечивает качественного представления пространственных и временных характеристик эхосигнала.
Задачей изобретения является повышение достоверности классификации эхосигналов от целей в условиях априорной неопределенности по помеховой ситуации, условиям работы и не известным классам.
Технический результат заключается в обеспечении оператора визуальной информацией по структуре эхосигнала по времени и по пространству в объемном отображении пространственных и временных признаков для анализа и корректировки результатов автоматической классификации в условиях воздействия поверхностной и донной реверберации.
Для достижения указанного технического результата в способ обработки гидролокационной информации, содержащий излучение зондирующего сигнала, прием эхосигнала статическим веером характеристик направленности, многоканальную цифровую обработки набора последовательных временных реализаций по последовательным пространственным каналам, определение коэффициента корреляции (КК) между последовательными временными интервалами, выбор последовательных временных интервалов между пространственными каналами с коэффициентом корреляции больше 0,5, определение амплитуд временных отсчетов выбранных временных интервалов, выбор максимальных амплитуд во временных интервалах с коэффициентом корреляции больше 0,5, идентификацию интервалов с КК>05 по общему времени обнаружения введены новые признаки, а именно выбирают все временные интервалы с коэффициентом корреляции больше 0,5 по всем пространственным каналам и определяют среднее значение амплитуд Аср, которое определяет амплитуду порога Апор, определяют временные интервалы, имеющие одинаковое время, из них определяют временные интервалы, принадлежащие соседним пространственным каналам, формируют отображение амплитуд выбранных временных интервалов в координатах дальность - пространственный канал (курсовой угол), смещают и поворачивают шкалу «начало координат отображения дальности» до получения наилучшего отображения на угол Q в пределах 360°, формируют объемное отображение амплитуд выбранных временных интервалов, где по каждому пространственному каналу выводят амплитуду эхосигнала и отображают зеленым цветом амплитуду помехи до Апор, и красным цветом амплитуду сигнала, превышающего Апор, яркостью тем светлее, чем больше амплитуда эхосигнала, при этом амплитуду эхосигнала отображают в логарифмическом масштабе с сохранением исходного цвета.
Угол поворота шкалы дальности Q выбирает оператор для обеспечения наглядности отображения нужного эхосигнала на фоне посторонних эхосигналов.
Физическая сущность изобретения заключается в следующем.
Объекты, которые могут быть обнаружены гидролокатором, имеют различные физические характеристики. Объекты могут находиться на поверхности или могут быть погружены на различную глубину, или просто располагаться на дне. Эхосигналы от этих объектов будут различаться по своим амплитудным, пространственным и временным характеристикам. Для определения этих характеристик используется многоканальный прием эхосигнала статическим веером характеристик направленности, что обеспечивает пространственную селекцию обнаруженных объектов по всем пространственным каналам. Эхосигнал от объекта, как конфигурация амплитудных отсчетов, может находиться в нескольких пространственных каналах, поскольку они перекрываются, и число этих каналов определяет угловую протяженность объекта. При этом, как правило, локальные отражатели принадлежат к классу отражателей искусственного происхождения. Поскольку локальный отражатель находится в дальнем поле и имеет ограниченные размеры, то эхосигнал от такого отражателя представляет плоскую, мало искаженную волну и будет приниматься несколькими характеристиками направленности одновременно и, соответственно, энергетические характеристики эхосигнала будут по физическим свойствам достаточно близкими в нескольких соседних пространственных каналах. Поэтому, если использовать узкие характеристики направленности, то эхосигналы, принимаемые ими, будут похожими и коэффициент корреляции между временными реализациями будет достаточно высоким. Отражение от поверхности и от дна, образующее реверберационную помеху, не имеет таких свойств. Единственным способом, который позволит отличить наличие когерентного локального отражателя является корреляционная обработка временных реализаций, принимаемых одновременно в соседних пространственных каналах. Таким образом, для реализации предлагаемого метода обработки, необходим прием эхосигнала веером статических характеристик направленности, определения степени корреляционной связи между каналами и определении числа каналов, в которых эта связь существует, Число каналов, между которыми определится высокий коэффициент корреляции, и будет характеризовать угловую протяженность объекта. Коэффициент корреляции должен определяться между временными интервалами всех соседних пространственных каналов последовательно. При этом в результате должны быть отобраны пространственные каналы, которые имеют одно и тоже временное положение по дистанции. Поскольку эхосигналы, которые характеризуют реальные объекты, имеют маленькую амплитуду по сравнению с отражениями от дна и реверберацией, они будут отображаться на экране малым уровнем, что не позволит оператору их обнаружить. Для того чтобы повысить эффективность обнаружения эхосигналов от реальных объектов предлагается отображать их в объемном 3-мерном 3Д-отображении. Для чего предлагается оператору развернуть плоское отображение линий дистанции под углом Q и отобразить амплитуды всех эхосигналов, которая используется в современной аппаратуре.(Афанасьев А.Н., Губарев Н.В., Ежов С.Н., Шейнман Е.Л. «Трехмерная визуализация сигнала в пассивных и активных гидроакустических средствах подводного наблюдения» НТС «Гидроакустика» 18(2) 2013.) В реальных условиях работы гидролокатора оператор должен иметь возможность выбрать угол поворота таким образом, что бы наиболее удобно рассматривать полученное амплитудное объемное отображение.
В зависимости от амплитуды сигнала цвет отображения должен изменяться от темного при малой амплитуде до светлого при большой. В гидроакустической аппаратуре место для отображения информации ограничено и поэтому эхосигналы с большой амплитудой могут закрывать эхосигналы с малой амплитудой в соседних пространственных каналах. Поэтому предлагается выводить амплитудную информацию не в реальных соотношениях, а в логарифмическом представлении амплитуд. Это известная процедура, которая позволяет ограничить динамический диапазон представляемых эхосигналов. (А.Е. Колесников «Акустические измерения» Л. Судостроение 1983 г стр. 151) Тогда эхосигналы малой амплитуды будут выводиться почти в реальном виде, а эхосигналы большой амплитуды в логарифмическом виде, что обеспечит сокращение амплитуды выводимой информации на индикатор, при этом отображение цветом должно сохраняться. Поэтому на индикаторе будет отображение эхосигнала малой амплитуды и большой амплитуды в сравнимых соотношениях, но цвет большой амплитуды будет подсказывать оператору реальные соотношения для оценки и принятия решения.
Кроме того, обеспечивается вывод информации по всем соседним пространственным каналам с коэффициентом корреляции больше 0,5, что обеспечивает классификацию протяженных по пространству объектов.
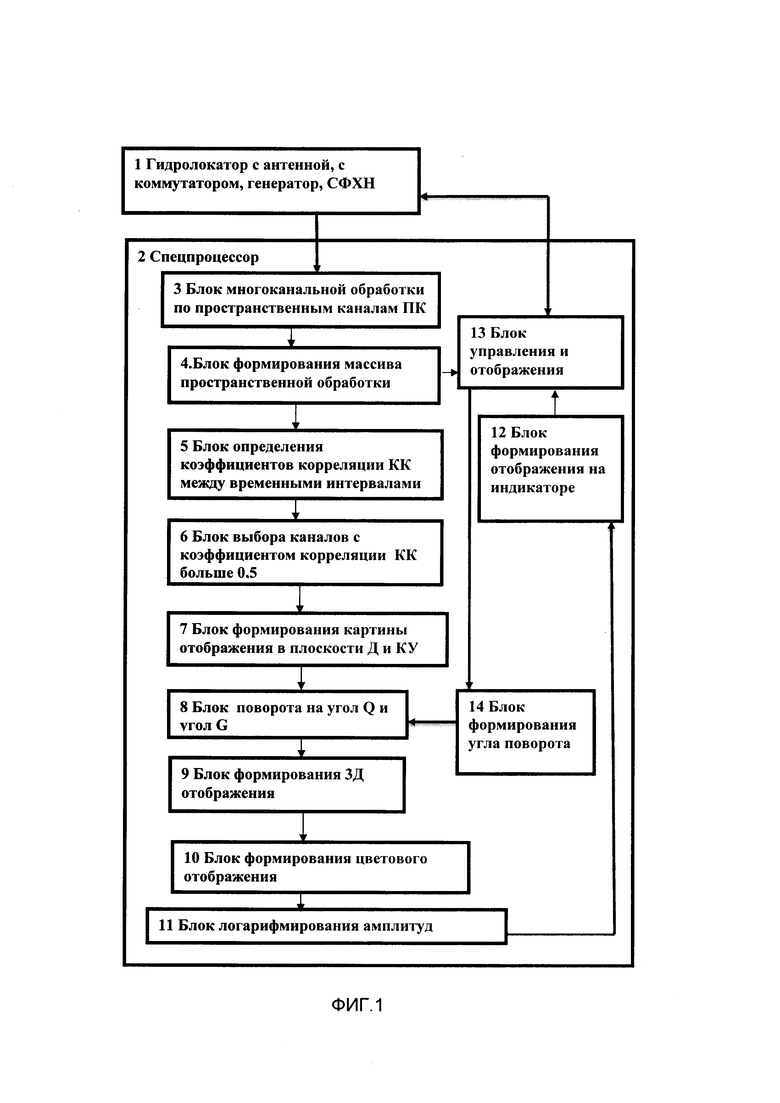
Сущность изобретения поясняется фиг. 1, на которой представлено устройство, реализующее способ.
Устройство (фиг. 1) содержит гидролокатор 1, в состав которого входит антенна, коммутатор, генератор и СФХН. Генератор 1 соединен с спецпроцессором 2. В состав спецпроцессора 2 входят последовательно соединенные блок 3 многоканальной обработки по пространственным каналам ПК, блок 4 формирования массива пространственной обработки, блок 5 определения коэффициентов корреляции, блок 6 выбора каналов с коэффициентом корреляции КК больше 0,5, блок 7 формирования картины отображения в плоскости Д и КУ, блок 8 поворота на угол Q и угол G, блок 9 формирования 3D отображения, блок 10 формирования цветового отображения, блок 11 логарифмирования амплитуд, блок 12 формирования отображения на индикаторе, блок 13 управления. Второй выход блока 13 через блок 14 формирования угла поворота соединен со вторым входом блока 8 поворота на угол Q и угол G. Блок 13 двухсторонней связью соединен с гидролокатором 1. Второй выход блока 4 соединен со вторым входом блока 13.
Предлагаемый способ целесообразно рассмотреть на примере функционирования устройства, реализующий способ.
С блока 13 управления и отображения поступает сигнал в блок 1 гидролокатора, который работает в своем штатном режиме. Гидролокатор является известным устройством, который используется в прототипе, где формируется зондирующий сигнал, излучают его в водную среду, принимают эхосигнал, производят фильтрацию принятого сигнала, формируют характеристики направленности в приеме, которые обеспечивают требуемую ширину характеристики направленности. Приемное устройство гидролокатора совместно со статическим веером характеристик направленности является известным устройством, которое используется в прототипе и описано в современной гидроакустической аппаратуре. (А.С. Колчеданцев. «Гидроакустические станции». Судостроение. Л. 1982 с 116.). Устройство производит предварительную фильтрацию входного сигнала и преобразует аналоговый сигнал в последовательные интервалы дискретизированных цифровых отсчетов всех пространственных характеристик. Спецпроцессор 2 принятия решения осуществляет пространственную и временную обработку поступившей информации с целью автоматического обнаружение эхосигнала и измерения основных параметров эхосигнала и измерения классификационных признаков. В блоке 3 осуществляется последовательное формирование принятых цифровых массивов и подготовки их для последующей обработки по всем пространственным каналам статического веера характеристик направленности. В блоке 4 поступившая временная и последовательная пространственная информация без предварительной обработки передается в блок 13 на систему отображения для предоставления оператору. В этом же блоке 4 формируются временные массивы для последовательного определения коэффициентов корреляции по соседним пространственным каналам. В блоке 5 осуществляется выбор временных интервалов соседних пространственных каналов из всего массива и определение коэффициента корреляции. Определение коэффициента корреляции является известной операцией, которое осуществляется во всех современных цифровых устройствах с использованием стандартных процедур. Практически все указанные процедуры могут быть реализованы на спецпроцессорах и современных компьютерах, в которых реализованы вычислительные программы Матлаб, Маткад и др. (А.Б. Сергиенко «Цифровая обработка сигналов» СПб. «БХВ - Петербург» 2011 г.). Полученные значения коэффициентов корреляции поступают в блок 6, где осуществляются выбор временных интервалов, коэффициент корреляции между которыми превысил порог 0,5 в соседних пространственных каналов.
В блоке 7 формируются картина отображения в координатах дистанция пространственный канал по всем соседним пространственным каналам и по дистанции равной максимальной протяженности реального объекта. В блоке 8 осуществляется поворот плоской пространственной картины отображения на фиксированный угол Q по дальности и G по курсовому углу, которые определяются оператором. Это операция связана с изменением положения координат шкалы дистанции и шкалы пространственных углов. Относительно этого положения осуществляется формирование объемного отображения амплитуд временных реализаций в блоке 9 формирование изображения в формате 3D. Эта операция также известная и достаточно подробно рассмотрена в работе. (Торн А. Графика в формате DirectX 9. «Полное руководство по использованию 3D-пространства». Пер с англ. НТ Пресс, 2007.). В блоке 10 производится цветовое окрашивание амплитуд временных реализаций в зависимости от значения амплитуды. Чем больше амплитуда временной реализации, тем светлее цвет отображения. Однако большие амплитуды эхосигналов от поверхности или дна могут перекрывать слабые эхосигналы от реальных объектов. Разность в амплитудном соотношении может достигать в 100 раз, и поэтому эти амплитуды могут занимать много места на индикаторе. Для устранения этого недостатка проводится логарифмирование в блоке 11, в результате которого выводится логарифм амплитуды, что существенно сокращает амплитудное различие, поскольку малые амплитуды реальных сигналов уменьшаются существенно меньше, чем большие амплитуды, при этом сохраняется цветовая окраска, которая проводится в блоке 10. Сформированное таким образом отображение эхосигнала в формате 3D передается в блок 12 для определения местоположения этого отображение на индикаторе и далее в блок 13 управления и отображение, который определяет время отображения и его расположение на кадре отображения. В блоке 13 оператор определяет угол поворота объемного отображения таким образом, что бы лучше можно было рассмотреть эхосигналы от реальных объектов, и передает эту команду в блок 14, который осуществляет этот поворот
В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также корреляционную обработку и процедуры анализа временных реализаций. Вопросы разработки и применения спецпроцессоров достаточно подробно рассмотрены в литературе по цифровой обработке. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука» 2004 г. стр. 281).
Таким образом, может быть сформирована картина отображения эхосигнала в формате 3D, что позволит обнаружить объекты на фоне реверберационной и пространственной помехи, что повышает вероятность правильного принятия решение о классе обнаруженного объекта.
Настоящее изобретение относится к области гидролокации и предназначено для повышения достоверности отображения гидролокационной информации оператору. Способ содержит излучение зондирующего сигнала, прием эхосигнала статическим веером характеристик направленности, многоканальную цифровую обработку набора последовательных временных реализаций по последовательным пространственным каналам, определение коэффициента корреляции (КК) между последовательными временными интервалами, выбор последовательных временных интервалов между пространственными каналами с коэффициентом корреляции больше 0,5, определение амплитуд временных отсчетов выбранных временных интервалов, выбор максимальных амплитуду во временных интервалах с коэффициентом корреляции больше 0,5, идентификации интервалов с КК>05 по общему времени обнаружения, среднее значение амплитуд Аср определяет амплитуду порога Апор, определяют временные интервалы, имеющие одинаковое время, из них определяют временные интервалы, принадлежащие соседним пространственным каналам, формируют отображение выбранных временных интервалов в координатах дальность - пространственный канал (курсовой угол), смещают и поворачивают полученную поверхность по шкале дальности на угол Q и по шкале курсового угла на угол G, формируют объемное отображение выбранных временных интервалов, где по каждому пространственному каналу выводят амплитуду эхосигнала и отображают зеленым цветом амплитуду помехи Апор и красным цветом амплитуду сигнала, превышающего Апор, яркость тем больше, чем больше амплитуда эхосигнала, при этом амплитуда эхосигнала отображается в логарифмическом масштабе с сохранением исходного цвета. 1 ил.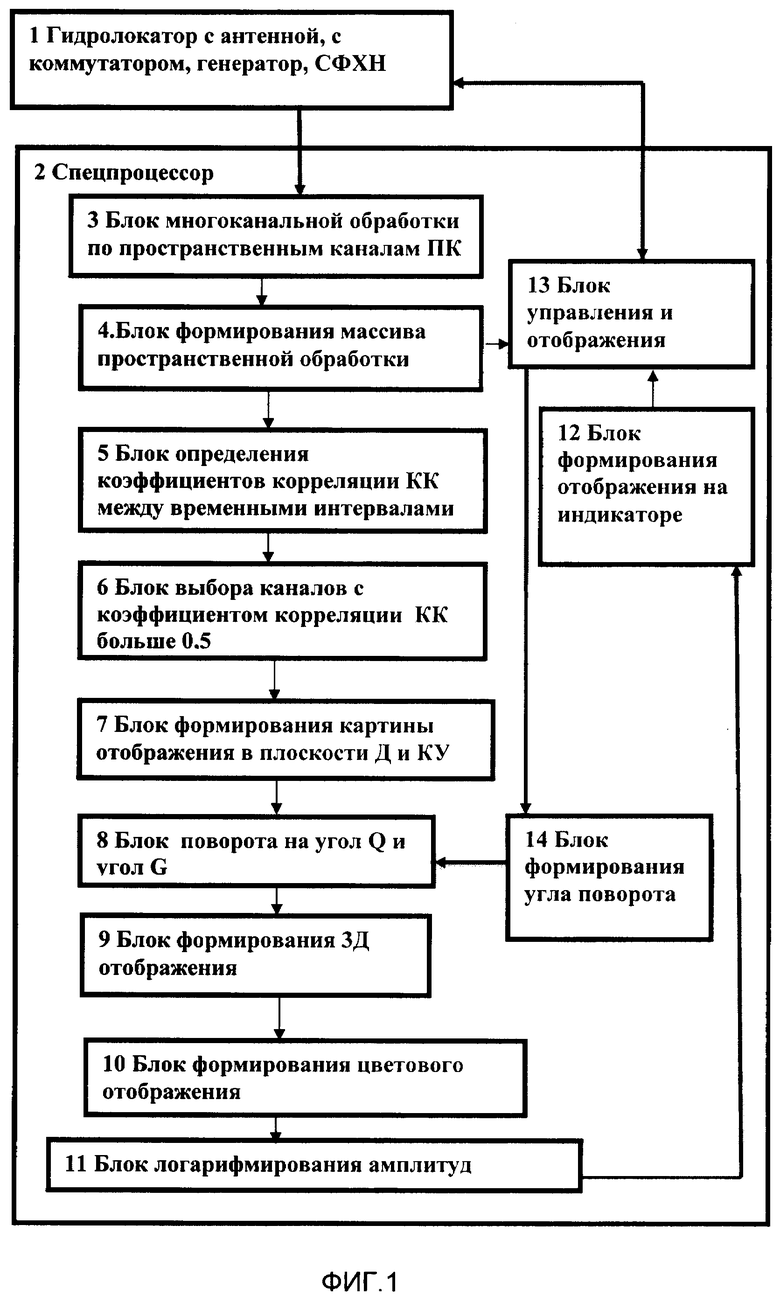
Способ отображения гидролокационной информации, содержащий излучение зондирующего сигнала, прием эхосигнала статическим веером характеристик направленности, многоканальную цифровую обработки набора последовательных временных реализаций по последовательным пространственным каналам, определение коэффициента корреляции (КК) между последовательными временными интервалами, выбор последовательных временных интервалов между пространственными каналами с коэффициентом корреляции больше 0,5, определение амплитуд временных отсчетов выбранных временных интервалов, выбор максимальных амплитуд во временных интервалах с коэффициентом корреляции больше 0,5, идентификации интервалов с КК>05 по общему времени обнаружения, отличающийся тем, что выбирают все временные интервалы с коэффициентом корреляции больше 0,5 по всем пространственным каналам, определяют среднее значение амплитуд Аср, которое определяет амплитуду порога Апор, определяют временные интервалы, имеющие одинаковое время, из них определяют временные интервалы, принадлежащие соседним пространственным каналам, формируют отображение выбранных временных интервалов в координатах дальность - пространственный канал (курсовой угол), смещают и поворачивают шкалу начало координат отображения дальности на угол Q в пределах от -180 до +180 и по шкале курсового угла G в пределах от 0 до 90° формируют объемное отображение выбранных временных интервалов, где по каждому пространственному каналу выводят амплитуду эхосигнала и отображают зеленым цветом амплитуду помехи Апор и красным цветом амплитуду сигнала, превышающего Апор, яркость тем больше, чем больше амплитуда эхосигнала, при этом амплитуда эхосигнала отображается в логарифмическом масштабе с сохранением исходного цвета.
| СИСТЕМА АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2626295C1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА И ИЗМЕРЕНИЯ ЕГО ПАРАМЕТРОВ | 2016 |
|
RU2627977C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
| US 20110128820 A1, 02.06.2011. | |||

