Настоящее изобретение относится к области измерительной техники, а именно к прецизионным измерительным преобразователям для измерения ускорения свободного падения.
Известен гравиметр, содержащий корпус, маятниковый чувствительный элемент с направлением его измерительной оси по вектору ускорения свободного падения, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом на корпусе и компенсационной катушкой на чувствительном элементе, усилитель и устройство частичной компенсации силы тяжести [1].
Наиболее близким по технической сущности является гравиметр [2], содержащий корпус, чувствительный элемент с направлением его измерительной оси по вектору ускорения свободного падения, преобразователь положения, силовой преобразователь магнитоэлектрического типа с постоянным магнитом на корпусе и компенсационной катушкой на чувствительном элементе, усилитель, нагрузку с первым резистором, измерительную схему, устройство частичной компенсации силы тяжести с источником тока, причем к выходу усилителя подключены последовательно соединенные первый резистор и компенсационная катушка.
Недостатками такового гравиметра является несовместимость с устройствами с дискретным преобразованием, усложнение конструкции чувствительного элемента, ограничение вибрационных воздействий.
Техническими результатами изобретения являются обеспечение цифрового выхода сигнала гравиметра, упрощение конструкции чувствительного элемента, повышение устойчивости к вибрационным воздействиям, повышение точности измерения ускорения свободного падения.
Данные технические результаты достигаются в гравиметре, содержащем корпус, чувствительный элемент с направлением его измерительной оси по вектору ускорения свободного падения, преобразователь положения, силовой преобразователь с постоянным магнитом на корпусе и компенсационной катушкой на чувствительном элементе, усилитель, нагрузку с первым резистором, измерительную схему, устройство частичной компенсации силы тяжести с источником тока, причем к выходу усилителя подключены последовательно соединенные первый резистор и компенсационная катушка, тем, что в нагрузку введены соединенный последовательно с первым резистором второй резистор и подключенный параллельно ему конденсатор, в гравиметр введены первый, второй, третий и четвертый электронные ключи, микропроцессор, устройство управления, источник тока подключен параллельно к компенсационной катушке, измерительная схема имеет первый и второй каналы, каждый из которых содержит аналого-цифровой преобразователь, реверсивный счетчик, регистр, в каждом канале к выходам аналого-цифрового преобразователя подключены входы реверсивного счетчика, к выходу которого подключен вход данных регистра, выходы регистров обоих каналов соединены шиной с входом микропроцессора, выход нагрузки подключен к входам первого и второго электронных ключей, выход первого электронного ключа подключен к входу третьего электронного ключа и к входу аналого-цифрового преобразователя первого канала, выход второго электронного ключа подсоединен к входу четвертого электронного ключа и к входу аналого-цифрового преобразователя второго канала, выходы третьего и четвертого электронных ключей соединены с общей шиной гравиметра, устройство управления содержит первое, второе, третье, четвертое, пятое и шестое логические устройства И, генератор тактовых импульсов с выходом частотой f0, делитель частоты с первым выходом частотой f0/2, с вторым выходом частотой f0/22, с третьим выходом с частотой f0/23, с четвертым выходом с частотой f0/2(3+k), с пятым выходом с частотой f0/2(4+k), с шестым выходом с частотой f0/2(4+k+n), первый, второй, третий и четвертый инверторы, выход генератора тактовых импульсов соединен с входом делителя частоты, с первыми входами первого, второго, третьего и четвертого логических устройств И, с тактовым входом микропроцессора, первый выход делителя частоты соединен с входом первого и второго инверторов, с вторыми входами третьего и четвертого логических устройств И, второй выход делителя частоты соединен с тактовым входом аналого-цифровых преобразователей обоих каналов и с первыми входами пятого и шестого логических устройств И, третий выход делителя частоты подключен к второму входу пятого логического устройства И и к входу третьего инвертора, четвертый выход делителя частоты соединен с третьим входом пятого логического устройства И и с вторым входом шестого логического устройства И, пятый выход делителя частоты подключен к четвертому входу пятого логического устройства И и к третьему входу шестого логического устройства И, шестой выход делителя частоты подключен к входу четвертого инвертора и к входам управления второго и третьего электронных ключей, выход первого инвертора соединен с вторым входом второго логического устройства И, к четвертому входу пятого логического устройства И подключен выход третьего инвертора, выход шестого логического устройства И соединен с третьими входами второго и четвертого логических устройств И, выход пятого логического устройства И подключен к третьему входу третьего логического устройства И и к второму входу первого логического устройства И, к третьему входу которого подключен выход второго инвертора, выход четвертого инвертора соединен с управляющим входом первого и четвертого электронных ключей, к четвертым входам второго и четвертого логических устройств И подключен выход считывания из микропроцессора, выход третьего логического устройства И соединен с входами разрешения записи в регистрах первого и второго каналов, выход первого логического устройства И подключен к входам обнуления реверсивных счетчиков первого и второго каналов, выход шестого логического устройства И подключен к входу запроса прерываний микропроцессора, выход четвертого логического устройства И соединен со входом счета регистра первого канала, выход второго логического устройства И подключен к входу счета регистра второго канала.
Подключением источника тока к компенсационной катушке, к которой подсоединен первый резистор, обеспечивается упрощение конструкции чувствительного элемента, так как преобразование сигналов гравиметра достигается с помощью одной компенсационной катушки, упрощается схема передачи сигналов на чувствительный элемент.
При включении в нагрузку второго резистора с подключенным параллельно ему конденсатором повышается точность измерения ускорения свободного падения вследствие повышения разрешающей способности гравиметра, обеспечиваемой увеличением падения напряжения на нагрузке. Одновременно с этим повышается устойчивость к вибрационным воздействиям, так как при повышенной амплитуде ускорения вибрации выходной сигнал усилителя остается в линейной зоне вследствие шунтирования конденсатором переменного сигнала, возникающего в нагрузке при вибрационных воздействиях.
Посредством выполнения измерительной схемы в составе первого и второго каналов, каждый из которых содержит аналого-цифровой преобразователь, реверсивный счетчик, регистр, введения в гравиметр первого, второго, третьего и четвертого электронных ключей, микропроцессора, устройства управления обеспечивается адаптация гравиметра к устройствам с дискретным преобразованием, так как выходным сигналом гравиметра является код. Одновременно при выполнении измерительной схемы в составе двух каналов повышается точность измерения ускорения свободного падения, так как устраняется погрешность преобразования аналогового сигнала в код.
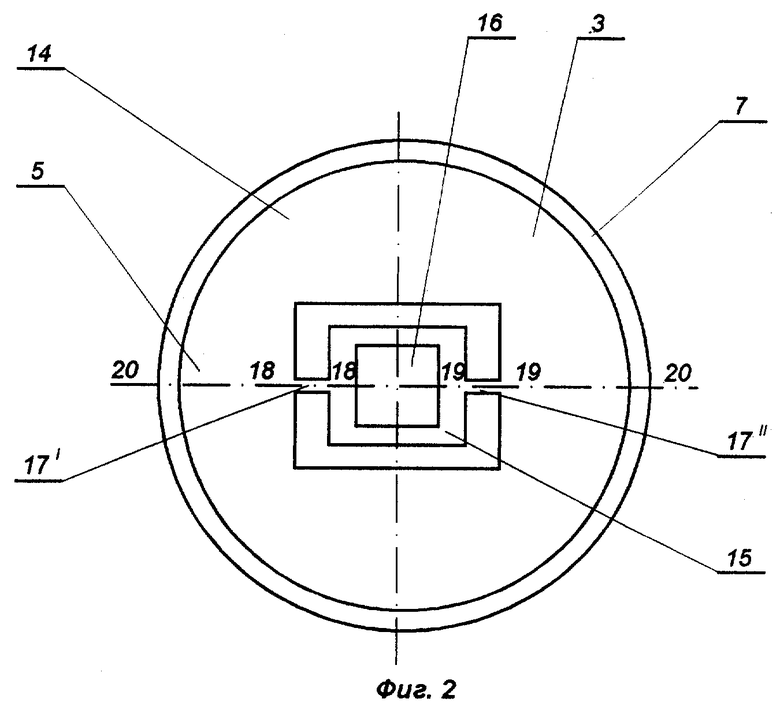
На фиг.1 представлен общий вид гравиметра, на фиг.2 - чувствительный элемент, на фиг.3 - принципиальная электрическая схема гравиметра с измерительной схемой, на фиг.4 - принципиальная электрическая схема устройства управления, на фиг.5 - циклограммы сигналов гравиметра.
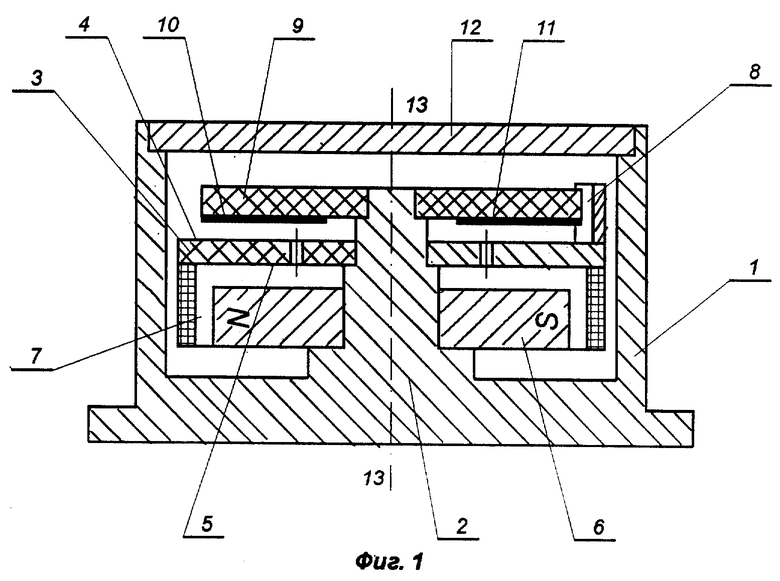
В гравиметре (фиг.1) в корпусе 1 со стойкой 2 установлены чувствительный элемент 3 в виде пластины с параллельными друг другу основными поверхностями 4, 5 и постоянный магнит 6 магнитоэлектрического силового преобразователя. На чувствительном элементе 3 на его основной поверхности 5 в рабочем зазоре магнитоэлектрического силового преобразователя установлена кольцевая компенсационная катушка 7, а на основной поверхности 4 - груз 8.
Магнитный поток постоянного магнита 6 замыкается через рабочий зазор с компенсационной катушкой 7 и корпус 1.
На стойке 2 также закреплена плата 9 с неподвижными электродами 10, 11 преобразователя положения емкостного типа. Гравиметр закрыт крышкой 12.
Ось 13-13 является измерительной осью гравиметра, и она перпендикулярна основным поверхностям 4, 5 чувствительного элемента 3.
В чувствительном элементе 3 (фиг.2) выполнены подвижная рамка 14 и неподвижная рамка 15 с окном 16. Подвижная рамка 14 и неподвижная рамка 15 соединены между собой посредством упругих перемычек 17’, 17’’. Ось изгиба 18-18 упругой перемычки 17’ и ось изгиба 19-19 упругой перемычки 17’’ образуют ось подвеса 20-20 подвижной рамки 14.
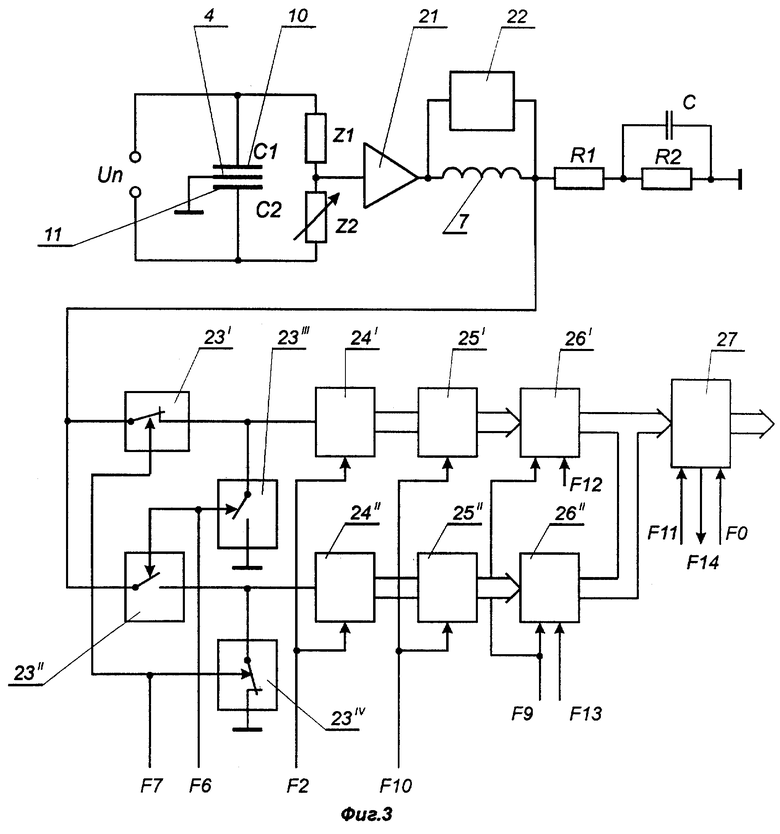
В гравиметре преобразователь положения (фиг.3) по мостовой схеме образован конденсаторами C1, C2 и элементами моста Z1, Z2 и запитывается напряжением Un переменного тока. Конденсатор C1 образован неподвижным электродом 10 на плате 9 и электропроводной основной поверхностью 4 на чувствительном элементе 3. Конденсатор C2 образован неподвижным электродом 11 и электропроводной основной поверхностью 4. Электропроводная основная поверхность 4 получается при изготовлении чувствительного элемента 3 из электропроводного материала. При изготовлении чувствительного элемента 3 из монокристаллического кремния электропроводность основной поверхности 4 достигается путем легирования кремния бором.
Выход преобразователя положения подключен к входу усилителя 21, к выходу которого последовательно подключены компенсационная катушка 7 и нагрузка, содержащая первый резистор R1, второй резистор R2, параллельно которому подключен конденсатор С. Параллельно к компенсационной катушке 7 подключен источник тока 22.
Выход нагрузки от точки соединения компенсационной катушки 7 с первым резистором R1 подключен к входам первого 23’ и второго 23’’ электронных ключей.
Первый канал измерительной схемы содержит аналого-цифровой преобразователь 24’, реверсивный счетчик 25’, регистр 26’. К выходу первого электронного ключа 23’ подключены вход третьего электронного ключа 23’’’ и вход аналого-цифрового преобразователя 24’, к выходам которого подсоединены входы реверсивного счетчика 25’. Выход реверсивного счетчика 25’ соединен с входом регистра 26’ шиной.
Второй канал измерительной схемы содержит аналого-цифровой преобразователь 24’’, реверсивный счетчик 25’’, регистр 26’’. Выход второго электронного ключа 23’’ соединен с входом четвертого электронного ключа 28IV и с входом аналого-цифрового преобразователя 24’’. Выходы аналого-цифрового преобразователя 24’’ соединены с входами реверсивного счетчика 25’’, выход которого соединен шиной с входом регистра 26’’. Выходы третьего 23’’’ и четвертого 23IV электронных ключей соединены с общей шиной гравиметра.
Выходы регистров 26’, 26’’ соединены шиной с входом микропроцессора 27.
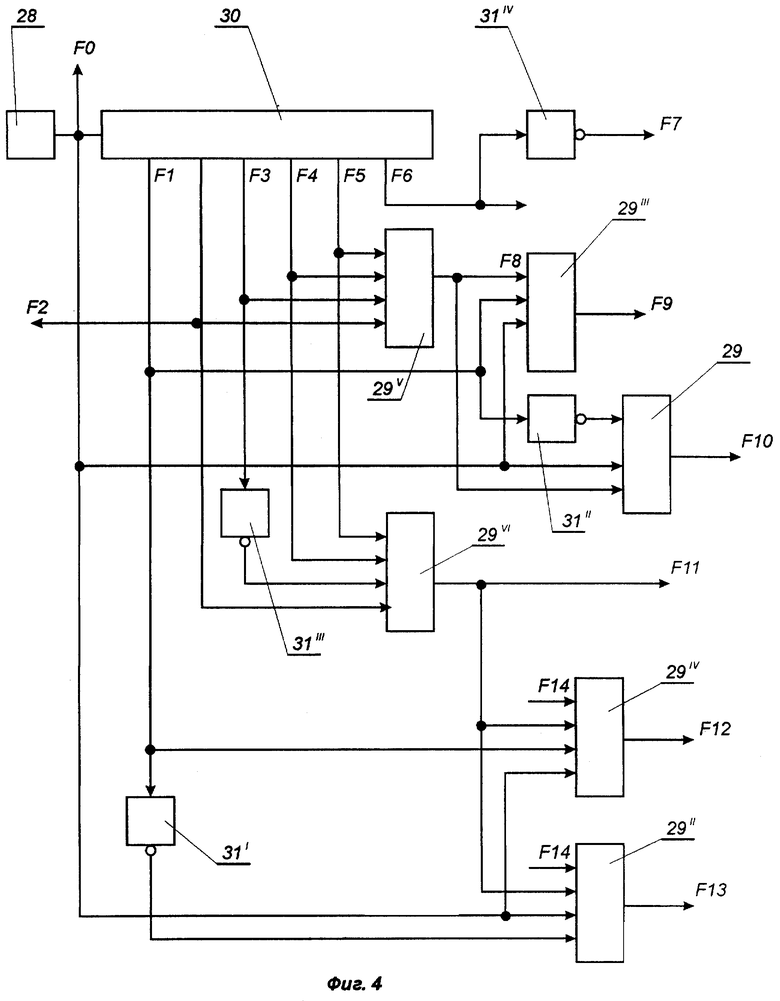
Устройство управления (фиг.4) содержит генератор 28 тактовых импульсов с выходом F0 частотой fo, первое 29’, второе 29’’, третье 29’’’, четвертое 29IV, пятое 29V и шестое 29VI логические устройства И, делитель частоты 30 с первым выходом F1 частотой f0/2, с вторым выходом F2 частотой f0/22, с третьим выходом F3 с частотой f0/23, с четвертым выходом F4 с частотой f0/2(3+k), с пятым выходом F5 с частотой f0/2(4+k), с шестым выходом F6 с частотой f0/2(4+k+n), первый 31’, второй 31’’, третий 31’’’ и четвертый 31IV инверторы. Выход F0 генератора 28 тактовых импульсов соединен с входом делителя частоты 30, с первыми входами первого 29’, второго 29’’, третьего 29’’’ и четвертого 29IV логических устройств И, с тактовым входом микропроцессора 27. Первый выход F1 делителя частоты 30 соединен с входом первого 31’ и второго 31’’ инверторов, с вторыми входами третьего 29’’’ и четвертого 29IV логических устройств И, второй выход F2 делителя частоты 30 соединен с тактовым входом аналого-цифровых преобразователей 24’, 24" и с первыми входами пятого 29V и шестого 29VI логических устройств И. Третий выход F3 делителя частоты 30 подключен к второму входу пятого логического устройства И 29V и к входу третьего инвертора 31’’’, четвертый выход F4 делителя частоты 30 соединен с третьим входом пятого логического устройства И 29V и с вторым входом шестого логического устройства И 29VI. Пятый выход F5 делителя частоты 30 подключен к четвертому входу пятого логического устройства И 29V и к третьему входу шестого логического устройства И 29VI, шестой выход F6 делителя частоты подключен к входу четвертого инвертора 31IV и к входам управления второго 23’’ и третьего 23IV электронных ключей. Выход первого инвертора 31’ соединен с вторым входом второго логического устройства И 29’’. К четвертому входу пятого логического устройства И 29V подключен выход третьего инвертора 31’’’, выход шестого логического устройства И 29VI соединен с третьими входами второго 29’’ и четвертого 29VI логических устройств И. Выход пятого логического устройства И 29V подключен к третьему входу третьего логического устройства И 29’’’ и к второму входу первого логического устройства И 29’, к третьему входу которого подключен выход второго инвертора 31’’. Выход F7 четвертого инвертора 31IV соединен с управляющим входом первого 23’ и четвертого 23IV электронных ключей. К четвертым входам второго 29’’ и четвертого 29IV логических устройств И подключен выход F14 считывания из микропроцессора 27. Выход F9 третьего логического устройства И 29’’’ соединен с входами разрешения записи в регистрах 26’, 26’’. Выход F10 первого логического устройства И 29’ подключен к входам обнуления реверсивных счетчиков 25’, 25’’. Выход F11 шестого логического устройства И 29VI подключен к входу запроса прерывания микропроцессора 27. Выход F12 четвертого логического устройства И 29IV соединен с входом счета регистра 26’ первого канала, выход F13 второго логического устройства И 29’’ подключен к входу счета регистра 26’’ второго канала.
Делитель частоты 30 может быть выполнен в виде нескольких последовательно соединенных делителей частоты на 2.
Гравиметр работает следующим образом. Его устанавливают так, чтобы измерительная ось 13-13 гравиметра была направлена по вектору ускорения свободного падения. Сила тока источника тока 22 выбрана такой, чтобы создаваемая этим током в силовом преобразователе сила полностью или частично компенсировала силу тяжести. Изменение ускорения свободного падения приводит к изменению силы тяжести и появлению сигнала на выходе преобразователя положения. После усиления сигнала преобразователя положения в усилителе 21 проходящим с выхода усилителя 21 через компенсационную катушку 7 током на первом резисторе R1 и втором резисторе R2 создается напряжение Ua, являющееся мерой изменения ускорения свободного падения.
Так как посредством подключенного к компенсационной катушке 7 источника тока 22 компенсируется часть силы тяжести, то изменение ускорения свободного падения вызывает изменение напряжения Ua, максимальное значение которого близко к максимальному выходному напряжению усилителя 21. Поэтому повышается точность измерения ускорения свободного падения вследствие повышения разрешающей способности гравиметра. При вибрационных воздействиях часть переменной составляющей напряжения Ua шунтируется посредством конденсатора С. Поэтому на долю постоянной составляющей напряжения Ua остается большая часть выходного напряжения усилителя 21.
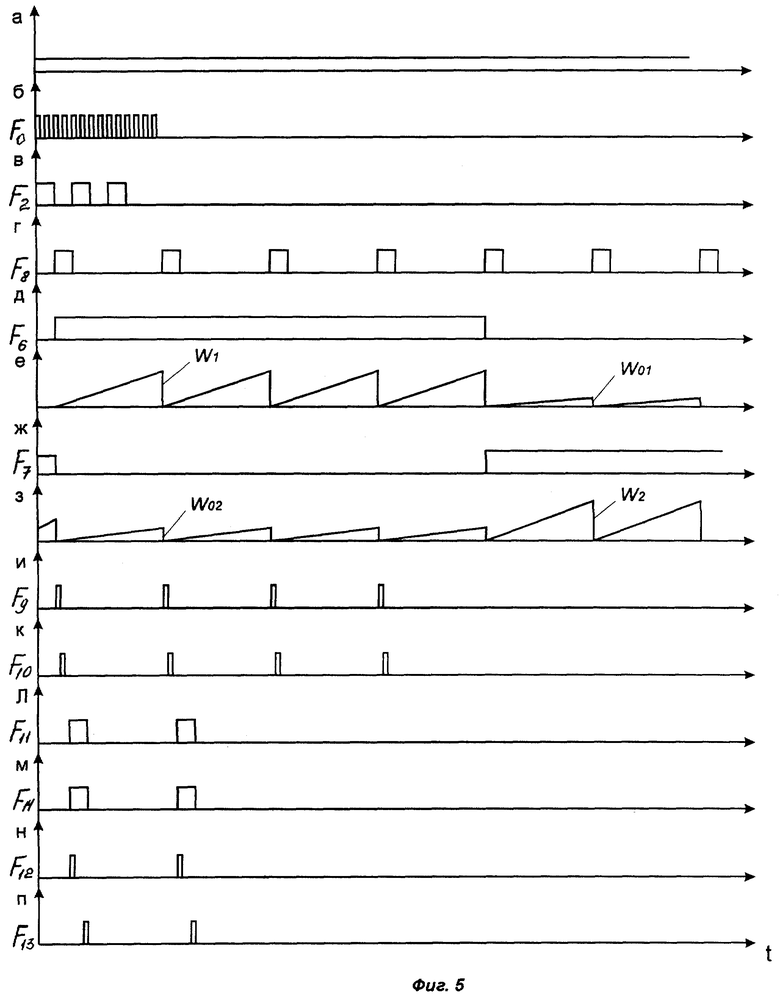
Сигнал частотой fo на выходе F0 (фиг.5, б) генератора тактовых импульсов 28 в делителе частоты 30 преобразуется так, что на его выходе F6 (фиг.5, д) и на выходе F7 (фиг.5, ж) четвертого инвертора 31IV получаются импульсы частотой fo/2(4+k+n). В результате первый 23’ и четвертый 23IV электронные ключи замыкаются, а второй 23’’ и третий 23’’’ электронные ключи размыкаются.
Напряжение Ua (фиг.5, а) нагрузки усилителя 21 через замкнутый первый электронный ключ 23’ подается на вход аналого-цифрового преобразователя 24’, где преобразуется в частотно-импульсный сигнал с частотой fацп1:

где К - коэффициент преобразования аналого-цифрового преобразователя 24’;
U01 - приведенный к входу собственный сигнал аналого-цифрового преобразователя 24’.
Реверсивный счетчик 25’ преобразует сигнал, поступающий с выхода аналого-цифрового преобразователя 24’, в количество импульсов
где t1 - интервал времени счета, определяемый частотой F8 (фиг.5, г) на выходе пятого логического устройства И 29V:

где Wa, W01 - количество импульсов, определяемое сигналами Ua и U01 соответственно.
По сигналу с выхода F9 (фиг.5, и) третьего логического устройства И 29’’’ содержимое реверсивного счетчика 25’ переписывается в регистр 26’, преобразуясь в код:

где Na, N01 - код, определяемый количеством импульсов Wa и W01 соответственно.
По сигналу с выхода F10 (фиг.5, к) первого логического устройства И 29’ производится обнуление реверсивного счетчика 25’.
По получении сигнала запроса прерывания с выхода F11 (фиг.5, л) шестого логического устройства И 29VI микропроцессор 27 с выхода f14 (фиг.5, м) подает сигнал на считывание на входы четвертого логического устройства И 29IV и второго логического устройства И 29’’. По сигналу с выхода F12 (фиг.5, н) четвертого логического устройства И 29IV производится считывание кода N1 из регистра 26’ в микропроцессор 27. В микропроцессоре 27 суммируются коды N1 в интервале времени от 0 до t2
При этом в микропроцессоре 27 производится накопление кода N

В момент времени t2 первый электронный ключ 23’ и четвертый электронный ключ 23IV становятся разомкнутыми, а второй 23 и третий 23’’’ электронные ключи становятся замкнутыми. Поэтому за интервал времени счета t1 реверсивный счетчик 25’ и подсчитывает W01 количество импульсов, определяемое сигналом U01, а в регистре 26’ формируется код N01. В интервале времени от t2 до t3, равном интервалу времени от 0 до t2, в микропроцессоре 27 производится накопление кода  первого канала
первого канала
В интервале времени от t2 до t3 подаваемый на вход аналого-цифрового преобразователя 24’’ сигнал преобразуется в частотно-импульсный с частотой fацп2:

где U02 - приведенный к входу собственный сигнал аналого-цифрового преобразователя 24’’.
Количество импульсов W2 за интервал времени счета t1 на выходе реверсивного счетчика 25’’:

где W02 - количество импульсов, определяемых сигналом U02. Содержимое реверсивного счетчика 25’’ преобразуется в регистре 26’’ в код:

где N02 - код, определяемый количеством импульсов W02.
Операции обнуления реверсивного счетчика 25’’, записи в регистр 26’’ второго канала производятся аналогично операциям в первом канале.
Считывание кода N2 регистра 26’’ в микропроцессор 27 производится по сигналу выхода F13 (фиг.5, п) второго логического устройства И 29’’.
В микропроцессоре 27 производится накопление кода  второго канала:
второго канала:
В интервале времени от 0 до t2 в микропроцессоре 27 производится накопление кода  второго канала:
второго канала:
В микропроцессоре 27 вычисляется код Ng изменения ускорения свободного падения.

Посредством произведенного процесса обработки информации в гравиметре устраняется погрешность определения изменения ускорения свободного падения при преобразовании аналогового сигнала в код.
При калибровке гравиметра производится точное измерение части ускорения свободного падения, компенсируемого сигналом от источника тока 22. Код скомпенсированной части ускорения свободного падения может быть записан в микропроцессоре 27. Этот код вместе с кодом Ng измерения ускорения свободного падения позволяет определить полную величину ускорения свободного падения.
Источники информации
1. Патент РФ №2096813, кл. G 01 V 7/02, 7/04, 7/12, Гравиметр, 1996 г.
2. Авторское свидетельство СССР №575596, кл. G 01 V 7/04. Устройство для измерения силы тяжести, 1977 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| ФУНКЦИОНАЛЬНЫЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2282937C1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| РАСХОДОМЕР ТОПЛИВА | 1990 |
|
RU2035699C1 |
| Аналого-цифровой преобразователь с промежуточным преобразованием в частоту | 1989 |
|
SU1644382A1 |
| Аналого-цифровой преобразователь интегральных характеристик электрических величин | 1981 |
|
SU1035790A1 |
| Интегрирующий аналого-цифровой преобразователь | 1989 |
|
SU1633493A1 |
| Взрывозащищенный магнитный пускатель с устройством диагностирования | 1990 |
|
SU1778318A1 |
| Измерительный преобразователь для тензорезисторных весоизмерительных устройств | 1990 |
|
SU1830463A1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ТОЛЩИНЫ ЗАЩИТНЫХ ПОКРЫТИЙ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2084819C1 |
Изобретение относится к области измерительной техники, а именно к прецизионным измерительным преобразователям для измерения ускорения свободного падения. Сущность: гравиметр содержит чувствительный элемент, преобразователь положения, силовой преобразователь с компенсационной катушкой, первый резистор, измерительную схему, источник тока, усилитель, а также второй резистор с конденсатором, четыре электронных ключа, микропроцессор, устройство управления. Источник тока подключен параллельно компенсационной катушке, измерительная схема имеет первый и второй каналы, каждый из которых содержит аналого-цифровой преобразователь, реверсивный счетчик, регистр. Технический результат: обеспечение цифрового выхода сигнала гравиметра, упрощение конструкции чувствительного элемента, повышение устойчивости к вибрационным воздействиям, повышение точности измерения. 5 ил.
Гравиметр, содержащий корпус, чувствительный элемент с направлением его измерительной оси по вектору ускорения свободного падения, преобразователь положения, силовой преобразователь с постоянным магнитом на корпусе и компенсационной катушкой на чувствительном элементе, усилитель, нагрузку с первым резистором, измерительную схему, устройство частичной компенсации силы тяжести с источником тока, причем к выходу усилителя подключены последовательно соединенные первый резистор и компенсационная катушка, отличающийся тем, что в нагрузку введены соединенный последовательно с первым резистором второй резистор и подключенный параллельно ему конденсатор, в гравиметр введены первый, второй, третий и четвертый электронные ключи, микропроцессор, устройство управления, источник тока подключен параллельно к компенсационной катушке, измерительная схема имеет первый и второй каналы, каждый из которых содержит аналого-цифровой преобразователь, реверсивный счетчик, регистр, в каждом канале к выходам аналого-цифрового преобразователя подключены входы реверсивного счетчика, к выходу которого подключен вход данных регистра, выходы регистров обоих каналов соединены шиной с входом микропроцессора, выход нагрузки подключен к входам первого и второго электронных ключей, выход первого электронного ключа подключен к входу третьего электронного ключа и к входу аналого-цифрового преобразователя первого канала, выход второго электронного ключа подсоединен к входу четвертого электронного ключа и к входу аналого-цифрового преобразователя второго канала, выходы третьего и четвертого электронных ключей соединены с общей шиной гравиметра, устройство управления содержит первое, второе, третье, четвертое, пятое и шестое логические устройства И, генератор тактовых импульсов с выходом частотой fо, делитель частоты с первым выходом частотой fо/2, с вторым выходом частотой fо/22, с третьим выходом с частотой fо/23, с четвертым выходом с частотой fо /2(з+k), с пятым выходом с частотой fо/2(4+k), с шестым выходом с частотой fо/2(4+k+n), первый, второй, третий и четвертый инверторы, выход генератора тактовых импульсов соединен с входом делителя частоты, с первыми входами первого, второго, третьего и четвертого логических устройств И, с тактовым входом микропроцессора, первый выход делителя частоты соединен с входом первого и второго инверторов, с вторыми входами третьего и четвертого логических устройств И, второй выход делителя частоты соединен с тактовым входом аналого-цифровых преобразователей обоих каналов и с первыми входами пятого и шестого логических устройств И, третий выход делителя частоты подключен к второму входу пятого логического устройства И и к входу третьего инвертора, четвертый выход делителя частоты соединен с третьим входом пятого логического устройства И и с вторым входом шестого логического устройства И, пятый выход делителя частоты подключен к четвертому входу пятого логического устройства И и к третьему входу шестого логического устройства И, шестой выход делителя частоты подключен к входу четвертого инвертора и к входам управления второго и третьего электронных ключей, выход первого инвертора соединен с вторым входом второго логического устройства И, к четвертому входу пятого логического устройства И подключен выход третьего инвертора, выход шестого логического устройства И соединен с третьими входами второго и четвертого логических устройств И, выход пятого логического устройства И подключен к третьему входу третьего логического устройства И и к второму входу первого логического устройства И, к третьему входу которого подключен выход второго инвертора, выход четвертого инвертора соединен с управляющим входом первого и четвертого электронных ключей, к четвертым входам второго и четвертого логических устройств И подключен выход считывания из микропроцессора, выход третьего логического устройства И соединен с входами разрешения записи в регистрах первого и второго каналов, выход первого логического устройства И подключен к входам обнуления реверсивных счетчиков первого и второго каналов, выход шестого логического устройства И подключен к входу запроса прерываний микропроцессора, выход четвертого логического устройства И соединен со входом счета регистра первого канала, выход второго логического устройства И подключен к входу счета регистра второго канала.
| Устройство для измерения силы тяжести | 1974 |
|
SU575596A1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| Цифровой автоматический гравиметр | 1980 |
|
SU934424A1 |
| US 3731538 А, 08.05.1973 | |||
| GB 1225129 А, 17.03.1971. | |||

