Изобретение относится к средствам захвата объектов при осуществлении операций по их спасению.
Из технической литературы известен способ захвата объекта другим захватывающим объектом, заключающийся в отделении части захватываемого объекта с сохранением механической связи, удержании отделяемой части на расстоянии от захватываемого объекта и механическом зацеплении отделяемой части захватываемого объекта частью захватывающего объекта путем перемещения его в пространстве, при этом отделение осуществляют до момента зацепления и удержание осуществляют до момента зацепления путем создания на отделяемой части удерживающей силы, направленной под углом к захватываемому объекту (“Перспективы развития систем подхвата космических аппаратов в воздухе”. Технический перевод №756. “AJAA Paper”, №68-1163, 1-14. “Военная авиация и ракетная техника”, вып.8, 1970 г., с.15-21. "Flug-Revue", 1964 г, №1, стр. 40).
Недостатками известного способа захвата объекта являются низкие надежность и безопасность, а также незначительный диапазон применения.
Техническая задача, на решение которой направлено изобретение, заключается в повышении надежности и безопасности процесса захвата объектов, расширении диапазона применения и арсенала технических средств.
Решение данной задачи достигается тем, что в способе захвата объекта другим захватывающим объектом, заключающемся в отделении, по крайней мере, одной части захватываемого объекта с сохранением механической связи, удержании отделяемой части на расстоянии от захватываемого объекта и механическом зацеплении, по крайней мере, одной отделяемой части захватываемого объекта, по крайней мере, одной, частью, по крайней мере, одного захватывающего объекта путем перемещения, по крайней мере, части последнего в пространстве, при этом отделение осуществляют, по крайней мере, за некоторое время до момента зацепления, и удержание осуществляют, по крайней мере, до момента зацепления путем создания, по крайней мере, на одной отделяемой части, по крайней мере, одной удерживающей силы, направленной под углом к захватываемому объекту, В СООТВЕТСТВИИ С ИЗОБРЕТЕНИЕМ, по крайней мере, за некоторое время до момента зацепления, по крайней мере, частично стабилизируют угловое положение относительно захватываемого объекта, по крайней мере, одной отделяемой части путем ее вращения с сообщением собственного кинетического момента, направленного под углом к захватываемому объекту.
Кроме того, в соответствии с изобретением, по крайней мере, одну отделяемую часть вращают до момента ее отделения от захватываемого объекта. По крайней мере, одну отделяемую часть вращают после ее отделения от захватываемого объекта. По крайней мере, часть удерживающей аэродинамической силы создают путем вращения, по крайней мере, одной отделяемой части относительно оси, расположенной под углом к захватываемому объекту. По крайней мере, одну отделяемую часть вращают с использованием тепловой энергии сгораемого топлива. По крайней мере, одну отделяемую часть вращают с использованием электромагнитной энергии. По крайней мере, одну отделяемую часть вращают с использованием механической энергии. По крайней мере, одну отделяемую часть вращают с использованием аэродинамической энергии. По крайней мере, часть удерживающей силы создают путем приложения, по крайней мере, к одной отделяемой части захватываемого объекта реактивной силы, направленной под углом к захватываемому объекту. По крайней мере, часть удерживающей силы создают путем приложения, по крайней мере, к одной отделяемой части захватываемого объекта аэростатической силы, направленной под углом к захватываемому объекту. Осуществляют, по крайней мере, частичную ориентацию относительно захватываемого объекта, по крайней мере, одной вращающейся отделяемой части захватываемого объекта. По крайней мере, одну вращающуюся отделяемую часть захватываемого объекта ориентируют, по крайней мере, за некоторое время до начала ее вращения. По крайней мере, одну вращающуюся отделяемую часть захватываемого объекта ориентируют в процессе ее вращения. По крайней мере, частичную ориентацию осуществляют путем создания, по крайней мере, на одной вращающейся отделяемой части захватываемого объекта, по крайней мере, одной ориентирующей силы, направленной под углом к захватываемому объекту. Уменьшают, по крайней мере, одну ориентирующую силу в процессе вращения вращающейся отделяемой части захватываемого объекта. По крайней мере, часть ориентирующей силы создают путем приложения, по крайней мере, к одной вращающейся отделяемой части захватываемого объекта аэродинамической силы, направленной под углом к захватываемому объекту. По крайней мере, часть ориентирующей силы создают путем приложения, по крайней мере, к одной вращающейся отделяемой части захватываемого объекта аэростатической силы, направленной под углом к захватываемому объекту. По крайней мере, частичную ориентацию, по крайней мере, одной вращающейся отделяемой части захватываемого объекта осуществляют до момента ее отделения. По крайней мере, частичную ориентацию, по крайней мере, одной вращающейся отделяемой части захватываемого объекта осуществляют после ее отделения. Уменьшают угловую скорость вращения вращающейся части захватываемого объекта, по крайней мере, после механического зацепления, по крайней мере, одной отделяемой части захватываемого объекта, по крайней мере, одной частью, по крайней мере, одного захватывающего объекта.
Далее изобретение поясняется более подробно с использованием графических материалов, где на фиг.1...3 показаны варианты исполнения устройства захвата и примеры реализации способа захвата различных объектов различными захватывающими объектами. На фиг.4...9 показаны варианты исполнения некоторых элементов устройства захвата.
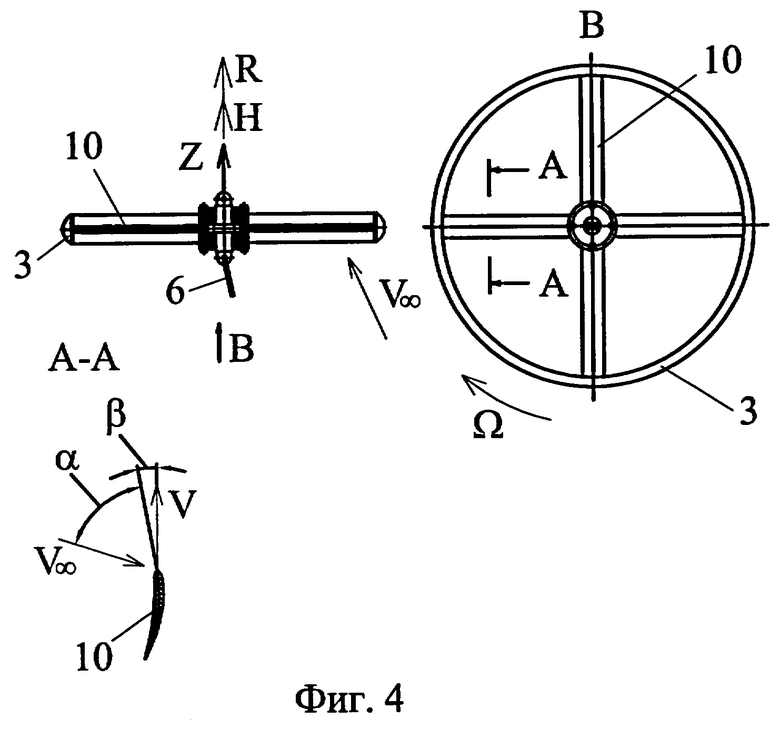
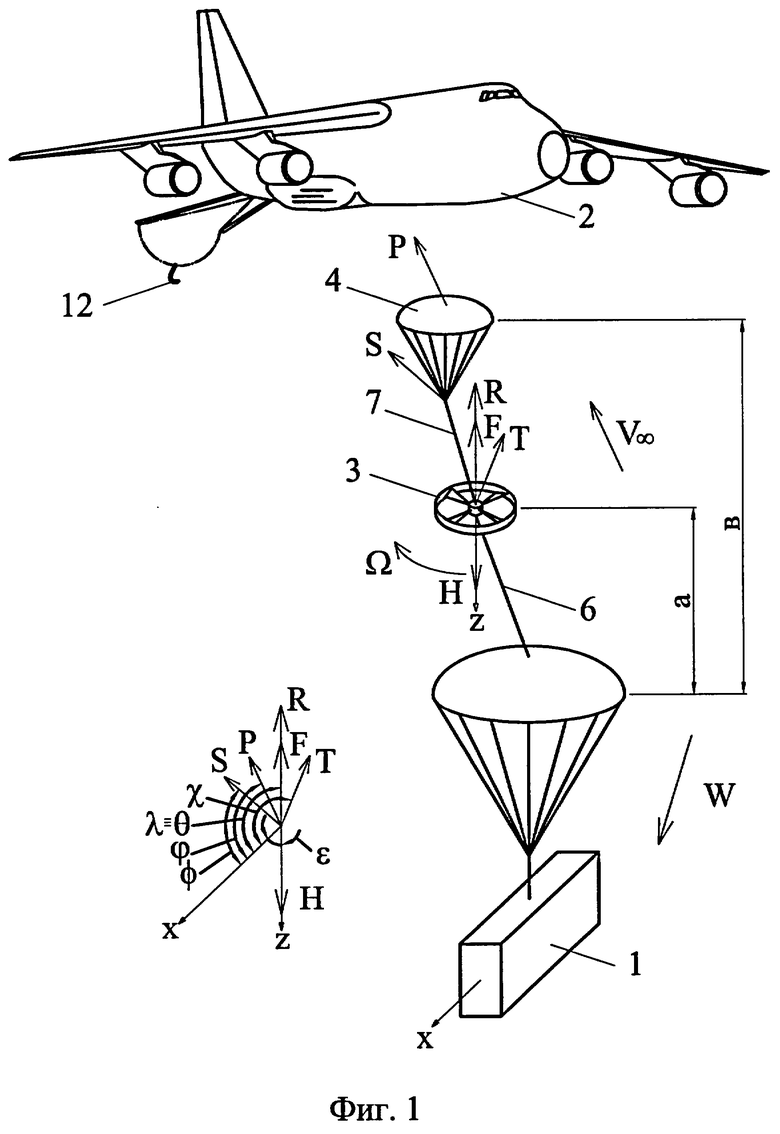
На фиг.1 захватываемый объект 1 показан в виде парашютирующего груза, а захватывающий объект 2 - в виде самолета; на фиг.2 захватываемый объект 1 показан в виде авторотирующего вертолета, а захватывающий объект 2 - в виде спасательного вертолета; на фиг.3 захватываемый объект 1 показан в виде лежащего на поверхности груза, а захватывающий объект 2 - в виде вертолета; на фиг.4...9 показаны различные варианты конструктивного исполнения вращающейся отделяемой части захватываемого объекта 2, выполненного в виде ротора 3.
Способ захвата реализуется следующем образом.
Возможен захват движущегося со скоростью W объекта 1, например, в виде парашютирующего в атмосфере груза захватывающим объектом 2, например самолетом (см. фиг.1).
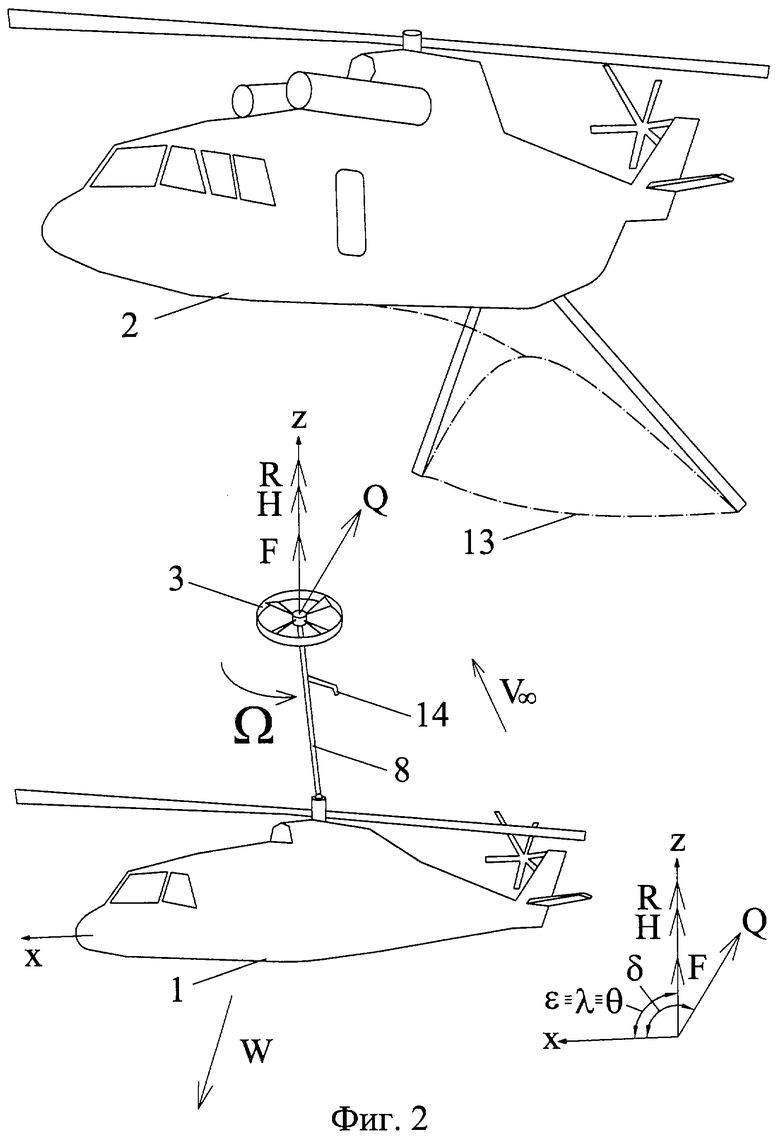
Возможен захват движущегося со скоростью W объекта 1, например, в виде снижающегося в атмосфере авторотирующего вертолета захватывающим объектом 2, например спасательным вертолетом (см. фиг.2).
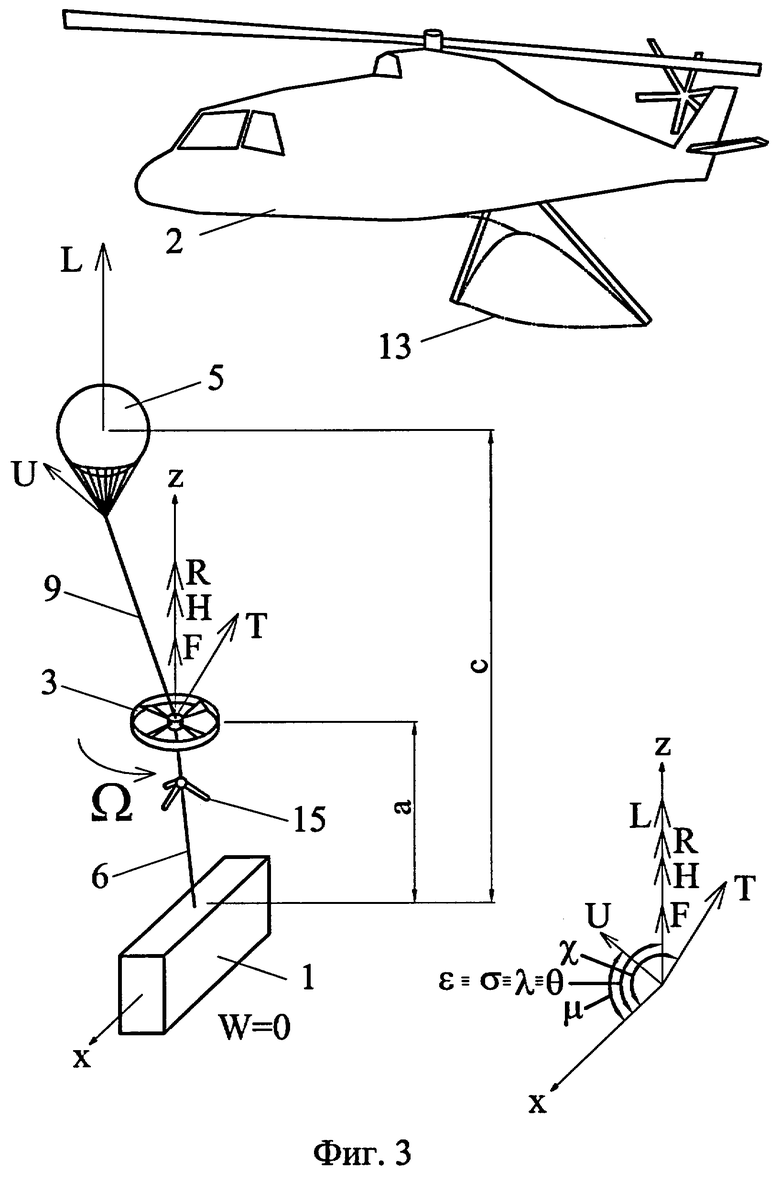
Возможен захват неподвижного объекта 1 (W=0), например, в виде лежащего на поверхности груза захватывающим объектом 2, например вертолетом (см. фиг.3).
Возможно отделение от захватываемого объекта 1 с сохранением механической связи с ним, например, 2-х частей, выполненных, например, в виде ротора 3 и парашюта 4 (см. фиг.1).
Возможно отделение от захватываемого объекта 1 с сохранением механической связи с ним, например, 1-й части, выполненной, например, в виде ротора 3 (см. фиг.2).
Возможно отделение от захватываемого объекта 1 с сохранением механической связи с ним, например, 2-х частей, выполненных, например, в виде ротора 3 и аэростата 5 (см. фиг.3).
Механическая связь ротора 3 с захватываемым объектом 1 может быть выполнена, например, в виде троса 6, закрепленного одним концом на захватываемом объекте 1, а другим концом - на роторе 3 (см. фиг.1, 3).
Механическая связь парашюта 4 через ротор 3 с захватываемым объектом 1 может быть выполнена, например, в виде троса 7, закрепленного одним концом на роторе 3, а другим концом - на парашюте 4 (см. фиг.1).
Механическая связь ротора 3 с захватываемым объектом 1 может быть выполнена, например, в виде телескопической штанги 8, шарнирно закрепленной одним концом на захватываемом объекте 1, а другим концом - на роторе 3 (см. фиг.2).
Механическая связь аэростата 5 через ротор 3 с захватываемым объектом 1 может быть выполнена, например, в виде троса 9, закрепленного одним концом на роторе 3, а другим концом - на аэростате 5 (см. фиг.3).
После отделения от захватываемых объектов 1 частей, выполненных, например, в виде ротора 3, парашюта 4, аэростата 5, осуществляют их удержание на расстоянии от захватываемых объектов 1 (см. фиг.1...3).
Возможно, например, частичное удержание ротора 3 на расстоянии “а” от захватываемого объекта 1 путем создания удерживающей силы упругости Т, направленной под углом “χ” к, например, продольной оси “х” захватываемого объекта 1, за счет выбора жесткостных характеристик механической связи - троса 6 и элементов его закрепления (см. фиг.1, 3).
Возможно, например, частичное удержание парашюта 4 на расстоянии “в” от захватываемого объекта 1 путем создания удерживающей силы упругости S, направленной под углом “φ” к, например, продольной оси “х” захватываемого объекта 1, за счет выбора жесткостных характеристик механических связей - тросов 6, 7 и элементов их закрепления (см. фиг.1).
Возможно, например, удержание ротора 3 на расстоянии “а” от захватываемого объекта 1 путем создания удерживающей силы упругости Q, направленной под углом “δ” к, например, продольной оси “х” захватываемого объекта 1, за счет выбора жесткостных характеристик механической связи - штанги 8 и элементов ее закрепления (см. фиг.2).
Возможно, например, частичное удержание аэростата 5 на расстоянии “с” от захватываемого объекта 1 путем создания удерживающей силы упругости U, направленной под углом “μ” к, например, продольной оси “х” захватываемого объекта 1, за счет выбора жесткостных характеристик механических связей - тросов 6, 9 и элементов их закрепления (см. фиг.3).
Возможно, например, удержание ротора 3 и парашюта 4 на расстояниях “а” и “в” от захватываемого объекта 1 путем создания на парашюте 4 удерживающей аэродинамической силы Р, направленной под углом “ϕ” к, например, продольной оси “х” захватываемого объекта 1, за счет обтекания потоком воздуха со скоростью V∞ парашюта 4 (см. фиг.1).
Возможно, например, удержание ротора 3 и аэростата 5 на расстояниях “а” и “с” от захватываемого объекта 1 путем создания на аэростате 5 удерживающей аэростатической силы L, направленной под углом “σ” к, например, продольной оси “х” захватываемого объекта 1 (см. фиг.3).
Возможно, например, удержание ротора 3 на расстоянии “а” от захватываемого объекта 1 путем создания на роторе 3 удерживающей аэродинамической силы R, направленной под углом “λ” к, например, продольной оси “х” захватываемого объекта 1, за счет вращения ротора 3 с угловой скоростью “Ω” относительно оси “z”, расположенной под углом “ε” к, например, продольной оси “х” захватываемого объекта 1 (см. фиг.1, 2, 3), при этом ротор 3 может быть снабжен, например, лопастями 10 (см. фиг.4-9), установленными под углом атаки “β” к вектору окружной скорости V ротора 3 (см. фиг.4).
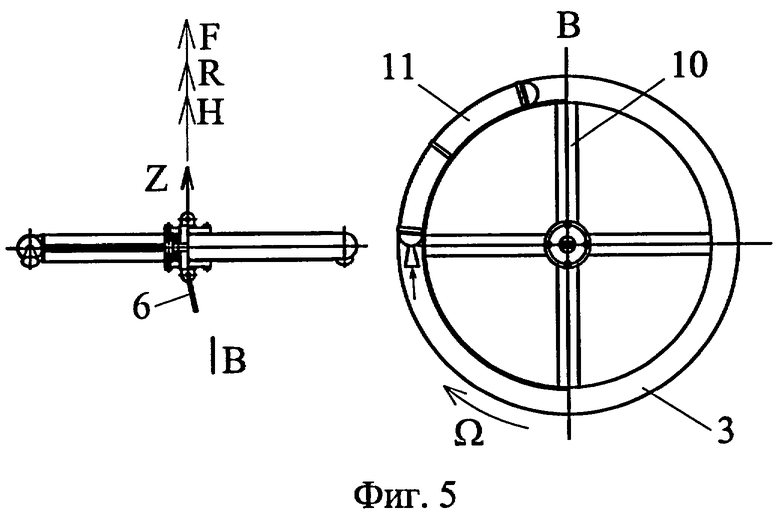
Возможно, например, удержание ротора 3 на расстоянии “а” от захватываемого объекта 1 путем приложения к ротору 3 удерживающей реактивной силы F, направленной под углом “θ” к, например, продольной оси “х” захватываемого объекта 1 (см. фиг.1, 2, 3), при этом ротор 3 может быть снабжен, например, ракетными двигателями 11 (см. фиг.5).
Величины расстояний “а”, “в” и “с” могут выбираться, например, из условий безопасности осуществления процесса захвата.
Возможно механическое зацепление частью захватывающего объекта 2, выполненной, например, в виде крюка 12, части захватываемого объекта 1, выполненной, например, в виде парашюта 4, путем перемещения захватывающего объекта 2 в пространстве (см. фиг.1).
Возможно механическое зацепление частью захватывающего объекта 2, выполненной, например, в виде петли 13, части захватываемого объекта 1, выполненной, например, в виде крюка 14, закрепленного, например, на штанге 8, путем перемещения захватывающего объекта 2 в пространстве (см. фиг.2).
Возможно механическое зацепление частью захватывающего объекта 2, выполненной, например, в виде петли 13, части захватываемого объекта 1, выполненной, например, в виде крюка 15, закрепленного, например, на тросе 6, путем перемещения захватывающего объекта 2 в пространстве (см. фиг.3).
Отделение ротора 3 и парашюта 4 от захватываемого объекта 1 осуществляют по заложенной ранее программе или по дополнительной команде за некоторое время до момента зацепления крюком 12 парашюта 4, и удержание ротора 3 и парашюта 4 на расстояниях “а” и “в” от захватываемого объекта 1 осуществляют, по крайней мере, до момента зацепления (см. фиг.1).
Отделение ротора 3 от захватываемого объекта 1 осуществляют по заложенной ранее программе или по дополнительной команде за некоторое время до момента зацепления петли 13 за крюк 14, и удержание ротора 3 на расстоянии “а” от захватываемого объекта 1 осуществляют, по крайней мере, до момента зацепления (см. фиг.2).
Отделение ротора 3 и аэростата 5 от захватываемого объекта 1 осуществляют по заложенной ранее программе или по дополнительной команде за некоторое время до момента зацепления петли 13 за крюк 15, и удержание ротора 3 и аэростата 5 на расстояниях “а” и “с” от захватываемого объекта 1 осуществляют, по крайней мере, до момента зацепления (см. фиг.3).
Команда на отделение, например, ротора 3, парашюта 4, аэростата 5 может быть подана за некоторое время до момента зацепления, например, как от захватываемого объекта 1, так и от захватывающего объекта 2, например, по радиосигналу.
Для облегчения процесса зацепления крюком 12 парашюта 4, по крайней мере, за некоторое время до момента зацепления возможна стабилизация углового положения ротора 3 относительно захватываемого объекта 1 путем вращения с угловой скоростью “Ω” ротора 3, обладающего моментом инерции I, с сообщением ему собственного кинетического момента Н=I*Ω, направленного под углом “ε” к, например, продольной оси “х” захватываемого объекта 1 (см. фиг.1). При этом осуществляется стабилизация (т.е. сохранение положения под действием возмущающих факторов) парашюта 4 относительно захватываемого объекта 1, например, за счет
- жесткости механических связей ротора 3 - тросов 6, 7 и элементов их закрепления на роторе 3 (см. фиг.1);
- стабилизации удерживающих сил, созданных на роторе 3, например аэродинамической силы R или (и) реактивной силы F (см. фиг.1).
Стабилизация углового положения (т.е. сохранение углового положения под действием возмущающих факторов) ротора 3, обладающего собственным кинетическим моментом Н, обусловлена его гироскопическими свойствами.
Для облегчения процесса зацепления петлей 13 крюка 14, по крайней мере, за некоторое время до момента зацепления возможна стабилизация углового положения ротора 3 относительно захватываемого объекта 1 путем вращения с угловой скоростью “Ω” ротора 3, обладающего моментом инерции I с сообщением ему собственного кинетического момента H=I*Ω, направленного под углом “ε” к, например, продольной оси “х” захватываемого объекта 1 (см. фиг.2). При этом осуществляется стабилизация (т.е. сохранение положения под действием возмущающих факторов) штанги 8, а значит, и крюка 14, относительно захватываемого объекта 1, например, за счет
- жесткости механических связей ротора 3 - штанги 8 и элемента ее закрепления на роторе 3 (см. фиг.2);
- стабилизации удерживающих сил, созданных на роторе 3, например аэродинамической силы R или (и) реактивной силы F (см. фиг.2).
Для облегчения процесса зацепления петлей 13 крюка 15, по крайней мере, за некоторое время до момента зацепления возможна стабилизация углового положения ротора 3 относительно захватываемого объекта 1 путем вращения с угловой скоростью “Ω” ротора 3, обладающего моментом инерции I с сообщением ему собственного кинетического момента H=I*Ω, направленного под углом “ε” к, например, продольной оси “х” захватываемого объекта 1 (см. фиг.3). При этом осуществляется стабилизация (т.е. сохранение положения под действием возмущающих факторов) троса 6, а значит, и крюка 15, относительно захватываемого объекта 1, например, за счет
- жесткости механических связей ротора 3 - троса 6 и элемента его закрепления на роторе 3 (см. фиг.3);
- стабилизации удерживающих сил, созданных на роторе 3, например аэродинамической силы R или (и) реактивной силы F (см. фиг.3).
Возможно вращение ротора 3 до его отделения от захватываемого объекта 1 и (или) после отделения.
Возможно вращение ротора 3 относительно оси “z”, направленной под углом “ε” к, например, продольной оси “х” захватываемого объекта 1, за счет привода, который может быть размещен как на роторе 3, так и на захватываемом объекте 1 (см. фиг.1, 2, 3), а также использовать для своей работы энергию различной природы:
- механическую;
- аэродинамическую;
- электромагнитную;
- тепловую;
- и др.
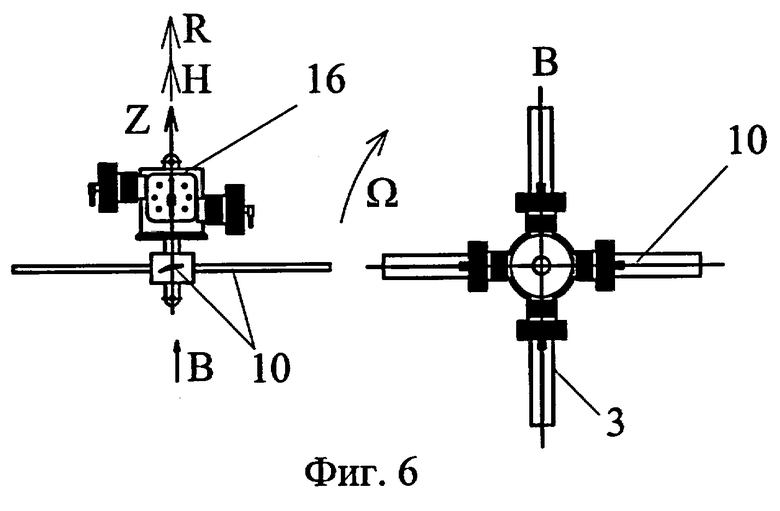
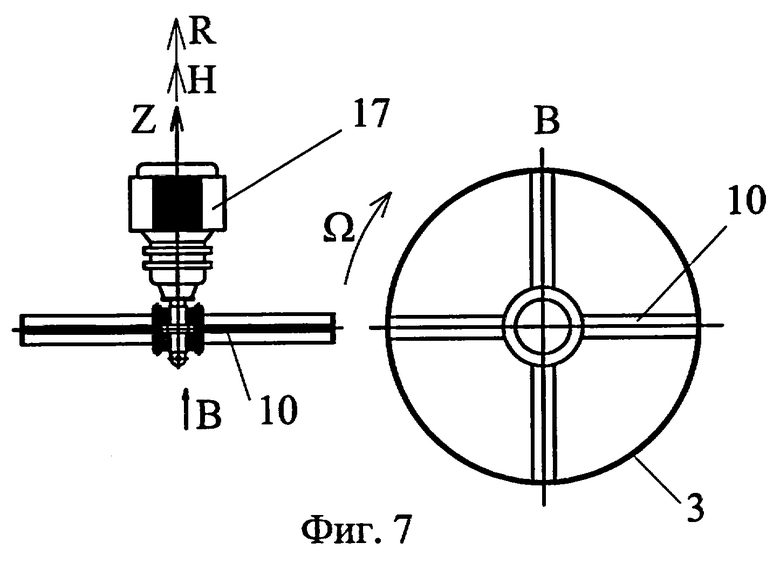
Возможно вращение ротора 3 как до отделения его от захватываемого объекта 1, так и после отделения, например, с использованием тепловой энергии сгораемого топлива, при этом ротор 3 может быть снабжен, например, автономным вращательным приводом, включающим в себя ракетные двигатели 11 (см. фиг.5), двигатель внутреннего сгорания 16 (см. фиг.6), газотурбинную установку 17 (см. фиг.7) и др.
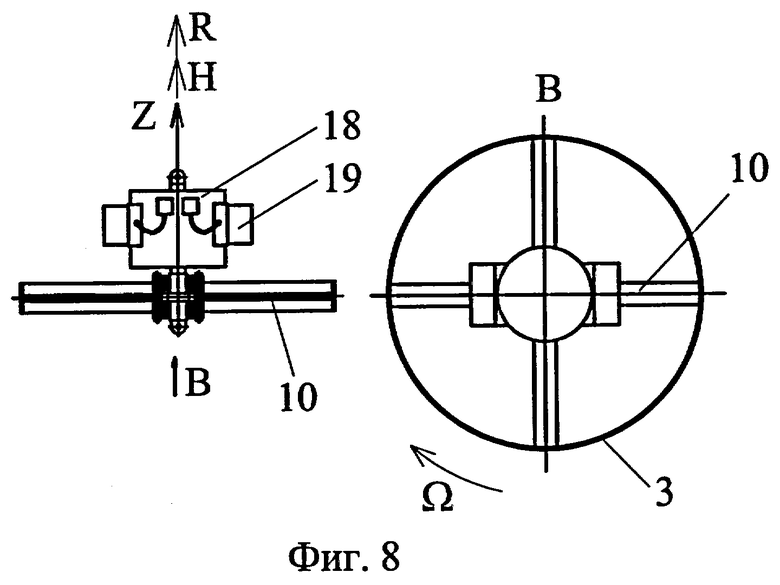
Возможно вращение ротора 3 как до отделения его от захватываемого объекта 1, так и после отделения, например, с использованием электромагнитной энергии, при этом ротор 3 может быть снабжен, например, автономным приводом, включающим в себя электродвигатель 18 (см. фиг.8), а источник питания 19 электродвигателя 18 может размещаться как на роторе 3 (см. фиг.8), так и на захватываемом объекте 1 с подачей электроэнергии, например по механической связи - тросу 6 (см. фиг.1, 3).
Возможно вращение ротора 3 как до отделения его от захватываемого объекта 1, так и после отделения, например, с использованием тепловой энергии сгораемого топлива, при этом ротор 3 может быть снабжен, например, автономным вращательным приводом, включающим в себя газогенератор 20 с газовыми соплами 21 (см. фиг.9).
Возможно вращение ротора 3 до отделения его от захватываемого объекта 1, например, с непосредственным использованием механической энергии вращения части захватываемого объекта 1, например ротора вертолета (см. фиг 2).
Возможно вращение ротора 3 как до отделения его от захватываемого объекта 1, так и после отделения, например, с использованием механической энергии вращения штанги 8, имеющей, например, привод от части захватываемого объекта 1, например ротора вертолета (см. фиг.2).
Возможно вращение ротора 3 как до отделения его от захватываемого объекта 1, так и после отделения, например, с использованием аэродинамической энергии (см. фиг.1, 2), при этом ротор 3 может быть снабжен, например, лопастями 10, установленными под углом атаки “α” к потоку V∞, обтекающему ротор 3 (см. фиг.4).
Возможно вращение ротора 3 с использованием аэродинамической энергии как до отделения его от захватываемого объекта 1, так и после отделения в режиме авторотации, т.е. вращение ротора 3 с созданием на нем удерживающей аэродинамической силы R, направленной под углом “λ” к, например, продольной оси “х” захватываемого объекта 1 (см. фиг.1, 2).
Во избежание скручивания тросов 6, 7 и 9 при вращения ротора 3 возможно, например, закрепление их на роторе 3 через элементы, допускающие свободный поворот ротора 3 относительно оси “z” (см. фиг.1, 3).
Для снижения энергетических затрат на вращение ротора 3 целесообразно, например, начинать его вращение при достижении захватываемым объектом 1 и (или) захватывающим объектом 2 требуемых для захвата параметров движения - высоты, скорости, ориентации, взаимного расположения и др. (см. фиг.1, 2, 3). При этом команда на начало работы привода вращения ротора 3 может быть подана, например, как от захватываемого объекта 1 (в том числе от подсистем привода вращения ротора 3), так и от захватывающего объекта 2, например, по радиосигналу.
Целесообразна ориентация ротора 3 относительно захватываемого объекта 1 за некоторое время до начала вращения ротора 3 и в процессе его вращения, например, до сообщения ротору 3, по крайней мере, части угловой скорости “Ω”, обеспечивающая требуемое угловое положение вектору кинетического момента Н (см. фиг.1, 2, 3).
Возможна, например, ориентация ротора 3 до отделения его от захватываемого объекта 1 путем, например, закрепления его на захватываемом объекте 1 в требуемом положении с возможностью вращения относительно захватываемого объекта 1 (см. фиг.1, 3).
Возможна, например, ориентация ротора 3 до отделения его от захватываемого объекта 1 путем, например, закрепления его, например, на части захватываемого объекта 1 в требуемом положении, например, на роторе вертолета (см. фиг.2).
Возможна, например, ориентация ротора 3 как до отделения его от захватываемого объекта 1, так и после отделения путем, например, создания на парашюте 4, а через трос 7 и на роторе 3 ориентирующей аэродинамической силы Р, направленной под углом “ϕ” к, например, продольной оси “х” захватываемого объекта 1, за счет обтекания потоком воздуха со скоростью V∞ парашюта 4 (см. фиг.1).
Возможна, например, ориентация ротора 3 как до отделения его от захватываемого объекта 1, так и после отделения путем, например, создания на аэростате 5, а через трос 9 и на роторе 3 ориентирующей аэростатической силы L, направленной под углом “σ” к, например, продольной оси “х” захватываемого объекта 1 (см. фиг.3).
Возможна, например, ориентация ротора 3 после его отделения от захватываемого объекта 1 путем, например, создания на нем ориентирующей силы упругости Т, направленной под углом “χ” к, например, продольной оси “х” захватываемого объекта 1 за счет выбора жесткости механической связи - троса 6 и элементов его закрепления (см. фиг.1, 3).
Возможна, например, ориентация ротора 3 после его отделения от захватываемого объекта 1 путем, например, создания на нем ориентирующей силы упругости Q, направленной под углом “δ” к, например, продольной оси “х” захватываемого объекта 1, за счет выбора жесткостных характеристик механической связи - штанги 8 и элементов ее закрепления (см. фиг.2).
После сообщения ротору 3, по крайней мере, части угловой скорости “Ω” ориентирующая аэродинамическая сила Р может быть снята (т.е. уменьшена до нуля) путем, например, отстрела парашюта 4 с тросом 7, а механическое зацепление может быть осуществлено, например, крюком 12 непосредственно за ротор 3 (см. фиг.1).
После сообщения ротору 3, по крайней мере, части угловой скорости “Ω” ориентирующая сила упругости Q может быть уменьшена путем, например, уменьшения жесткости механической связи - штанги 8 и элементов ее закрепления (см. фиг.2).
После сообщения ротору 3, по крайней мере, части угловой скорости “Ω” ориентирующая аэростатическая сила L может быть снята (т.е. уменьшена до нуля) путем, например, отстрела аэростата 5 с тросом 9 (см. фиг.3).
Команда на уменьшение ориентирующей силы может быть подана, например, как от захватываемого объекта 1 (в том числе от подсистем привода вращения ротора 3), так и от захватывающего объекта 2, например, по радиосигналу.
После механического зацепления крюков 14 и 15 петлей 13 (см. фиг.2, 3) возможно, например, уменьшение (в том числе и до нуля) угловой скорости “Ω” вращения ротора 3 путем, например, приложения к нему тормозящего момента или (и) отключения привода вращения. При этом команда на уменьшение угловой скорости “Ω” вращения ротора 3 может быть подана, например, по факту зацепления, например, как от захватываемого объекта 1, так и от захватывающего объекта 2, например, по радиосигналу.
После механического зацепления крюка 15 петлей 13 (см. фиг.3) возможно, например, отцепление ротора 3 от захватываемого объекта 1 путем разрушения троса 6 на участке ротор 3 - крюк 15 (см. фиг.3). Например, при движении крюка 15 зацепленного петлей 13 относительно ротора 3 с горизонтальной скоростью Vx происходит наклон троса 6 на участке ротор 3 - крюк 15 и возникновение в нем растягивающего усилия N (см. фиг.9а), что в свою очередь приводит к появлению момента My, действующего на ротор 3, который, обладая собственным кинетическим моментом Н, в силу своих гироскопических свойств прецессирует с угловой скоростью “ωх” (см. фиг.9б). При наклоне участка ротор 3 - крюк 15 троса 6 на некоторый угол “π” установленный на роторе 3 цилиндрический нож 22 (показан с условным вырезом) разрезает трос 6, отделяя ротор 3 от захватываемого объекта 1 (см. фиг.9б).
После механического зацепления крюка 15 петлей 13 (см. фиг.3) возможно, например, отцепление ротора 3 от захватываемого объекта 1 по заложенной ранее программе или по дополнительной команде.
Представленный способ обеспечивает надежный и безопасный захват различными подвижными объектами как движущихся, так и неподвижных объектов, функционирующих в различных средах - жидкости (например, воде), газе (например, воздухе), космосе и др. при осуществлении спасательных операций, транспортировки грузов, стыковки космических аппаратов и др.
В частности, данный способ может быть с успехом использован для захвата вертолетом отработавших ускорителей ракет-носителей при их спасении с целью повторного использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ РАКЕТ-НОСИТЕЛЕЙ И КОМПЛЕКТ РАКЕТНЫХ УСКОРИТЕЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242407C2 |
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144886C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ АЭРОСТАТА | 1999 |
|
RU2238217C2 |
| Баллистическая возвращаемая капсула | 1990 |
|
SU1821438A1 |
| ПАРНЫЙ АЭРОЭНЕРГОСТАТ | 2022 |
|
RU2781209C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| Баллистическая возвращаемая капсула | 1990 |
|
SU1818283A1 |
| Баллистическая возвращаемая капсула | 1990 |
|
SU1749125A1 |
| СИСТЕМА ПУСКА РАКЕТ И ВСПОМОГАТЕЛЬНАЯ АППАРАТУРА | 2011 |
|
RU2551047C2 |
| Аэродинамический воздухоплавательный аппарат | 2015 |
|
RU2609536C1 |

Изобретение относится к средствам подхвата в воздухе преимущественно спасаемых объектов авиационной и ракетно-космической техники. Предлагаемый способ включает отделение части захватываемого объекта при сохранении ее механической связи с ним, удержание отделяемой части на расстоянии от захватываемого объекта и ее механическое зацепление частью захватывающего объекта (самолета или вертолета). При этом угловое положение отделяемой части, выполненной в виде ротора, стабилизируют относительно захватываемого объекта, сообщая ей вращательный кинетический момент, вектор которого направляют под углом к продольной оси захватываемого объекта. За счет вращения ротора создают аэродинамическую удерживающую силу. Данная сила может быть дополнена реактивной или аэростатической удерживающими силами, создаваемыми с помощью известных вспомогательных средств (ракетных двигателей или баллонов). Кроме того, к указанному ротору может быть приложена ориентирующая сила аэродинамической или аэростатической природы, направленная под углом к продольной оси захватываемого объекта. Технический результат изобретения состоит в повышении надежности и безопасности подхвата объектов, расширении области применения и арсенала технических средств. 19 з.п. ф-лы, 9 ил.
| US 5740985 А, 21.04.1998 | |||
| US 4601444 А, 22.07.1986 | |||
| US 4848704 А, 18.07.1989 | |||
| Способ подхвата летательным аппаратом снижающегося на парашюте груза | 1990 |
|
SU1784527A1 |

