Изобретение относится к авиадвигателестроению, а именно к гиперзвуковым прямоточным воздушно-реактивным двигателям (ГПВРД), и определению их тягово-экономических характеристик по результатам летных испытаний.
Тяга гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) является одной из важнейших летно-технических характеристик гиперзвуковой летающей лаборатории (ГЛЛ). Серьезным препятствием, ограничивающим возможности определения тягово-экономических характеристик указанных двигателей на земных стендах, является их интеграция с планером гиперзвуковой летающей лаборатории (ГЛЛ): вся нижняя поверхность планера от носа до входа в ГПВРД профилируется как воздухозаборник, а кормовая часть от выхода из камеры сгорания до кормового среза планера является соплом одностороннего расширения. Поэтому для воспроизведения на стенде реальных условий полета требуется строительство крупногабаритных сооружений и создание высокоэнтальпийного потока воздуха с большим расходом и давлением. Для нагрева такого потока воздуха требуются огромные затраты энергетических ресурсов. В современных условиях это весьма затруднительно.
Известен способ прямого измерения силы тяги в полете (см. В.Н.Леонтьев, С.А.Сиротин. “Испытания авиационных двигателей и их агрегатов”, Москва: Машиностроение, 1976 г., стр.63). Однако для этого на летательном аппарате должна быть установлена специальная система измерения, включающая датчики измерения, термокомпенсационную платформу, установленную на фюзеляже с помощью шарнирных стержней или упругих лент растяжения и гибкие соединительные элементы по топливным трубопроводам и коммуникациям, чтобы двигатель мог свободно перемещаться вдоль продольной оси.
Основным недостатком данной системы является необходимость размещения на летательном аппарате дополнительных агрегатов и ограниченная точность измерений из-за воздействия условий полета на работу измерительного оборудования.
Известен “Способ измерения тяги реактивного двигателя в полете”, патент США №3465579 от 25 июля 1968 г., при котором по измерениям параметров рабочего процесса в полете вычисляют тягу двигателя по формуле сохранения импульса потока газов в камере сгорания.
Недостатком данного способа является измерение скорости потока на выходе из камеры сгорания, которое может быть выполнено используемым устройством, только в случае дозвукового потока, при небольших размерах сопла и с большой погрешностью из-за неоднородности потока газа.
Наиболее близким техническим решением, принятым за прототип, является “Метод измерения тяги реактивного двигателя в реальном масштабе времени”, патент ЕР №0342970.А2 от 19 мая 1988 г. В данном способе полная тяга двигателя определяется как разность общей силы, определяющей подъемную силу самолета, и силы аэродинамического сопротивления с учетом углов атаки и скольжения. Для определения этих составляющих в алгоритме расчетов используется большое количество измеряемых параметров, в том числе и ускорений самолета, также измеряемых в полете.
Существенным недостатком данного способа является довольно большая погрешность, которая накапливается при измерениях в полете большого количества параметров, в том числе термодинамических параметров смеси газов: температур, показателей изоэнтропы (k), газовой постоянной (R) с учетом реального состава газа.
Технической задачей предлагаемого способа является измерение тяги двигателя в полете гиперзвуковой летающей лаборатории (ГЛЛ) без введения специальных систем или доработок штатных систем.
Технический результат достигается за счет измерения приращения продольного ускорения, создаваемого действием силы от тяги двигателя в полете.
Как известно, в полете на летательный аппарат действуют одновременно силы аэродинамического сопротивления, земного тяготения и тяга двигателя. Для определения тяги двигателя необходимо разделение этих сил. Для этого производится выключение и включение подачи топлива в камеру сгорания в короткие рядом стоящие промежутки времени, которые не превышают 1 секунду. Тогда разность ускорений (Δ nх·g) в эти промежутки времени дает значение ускорения за счет тяги двигателя в полете. Для повышения точности эта операция может быть повторена 2-3 раза и взято среднее значение ускорения ω R, по которому определяется тяга двигателя в полете с помощью указанного соотношения механики.
Способ измерения тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя непилотируемой гиперзвуковой летающей лаборатории осуществляют следующим образом:
- производят измерение продольного ускорения (ω 1) летающей лаборатории, которая в этот момент движется под действием трех сил: 1 - тяги двигателя, 2 - земного тяготения, 3 - аэродинамического сопротивления;
- производят выключение подачи топлива, и двигатель становится неработающим;
- измеряют продольное ускорение (ω 2) летающей лаборатории при неработающем двигателе, которая в этот момент движется под действием двух сил: 1 - земного тяготения и 2 - аэродинамического сопротивления;
- производят включение подачи топлива;
- из измеренного значения ускорения при работающем двигателе вычитают измеренное значение ускорения при неработающем двигателе
ω R=ω 1-ω 2;
- полученную разность принимают за ускорение (ω R) летающей лаборатории, которое возникает под действием тяги двигателя;
- определяют тягу двигателя Rдв. в полете по формуле
Rдв.=ω R·Млл,
где Rдв. - тяга двигателя в полете;
ω R - ускорение летающей лаборатории под действием тяги двигателя;
Млл - масса летающей лаборатории, которая известна в любой момент времени.
На фиг.1, 2, 3, 4 и 5 изображены графики изменения параметров, измеренных в полете гиперзвуковой летающей лаборатории.
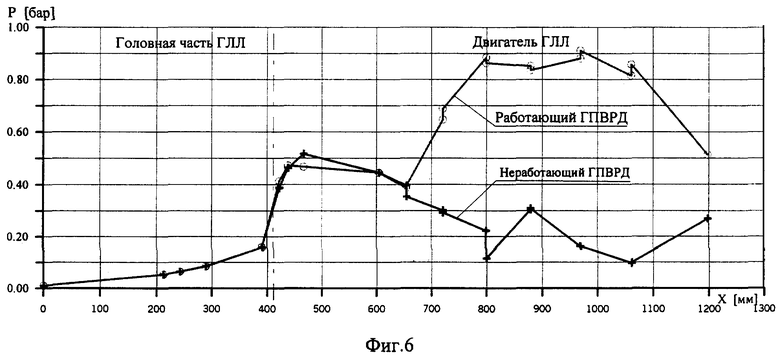
На фиг.6 изображен график распределения давлений по длине проточного тракта при работающем и неработающем двигателе гиперзвуковой летающей лаборатории (ГЛЛ).
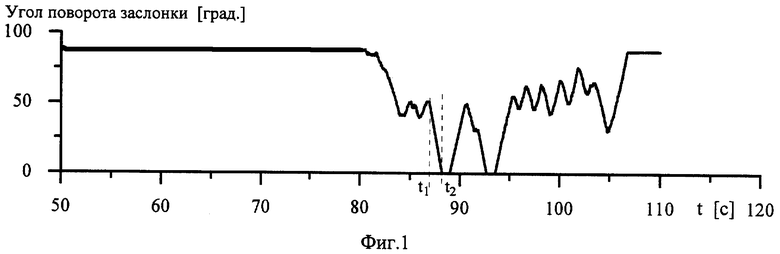
На фиг.1 изображен график изменения угла поворота топливной заслонки, где нулевое значение угла поворота в момент времени t2 означает, что заслонка полностью закрыта, топливо в двигатель не поступает и двигатель не работает.
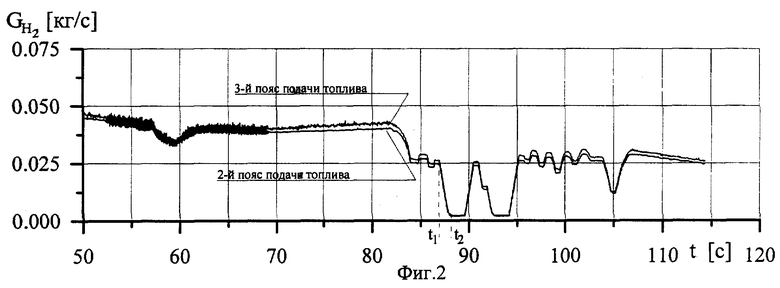
На фиг.2 изображен график изменения расхода топлива, из которого следует, что в момент времени t1, когда заслонка открыта, расход топлива равен номинальному значению, в момент времени t2, когда заслонка закрыта, расход топлива равен нулю.
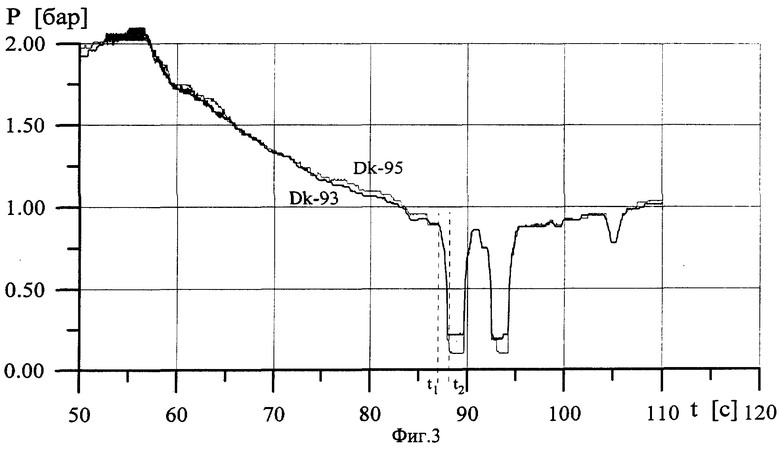
На фиг.3 изображен график изменения давления в камере сгорания, из которого следует, что в момент времени t1 давление равно номинальному значению, а в момент времени t2 оно равно давлению в холодном потоке через камеру.
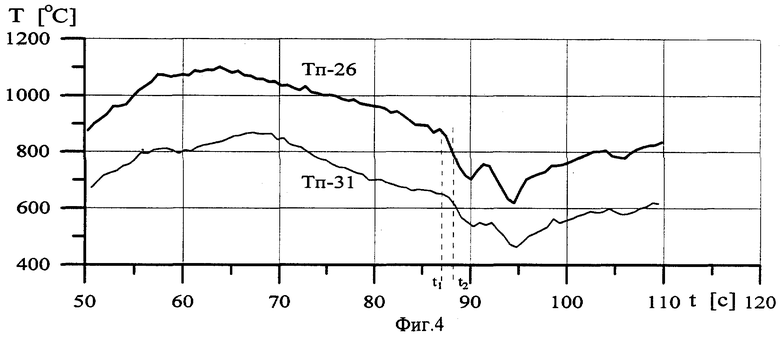
На фиг.4 изображен график изменения температуры стенки камеры, но за счет инерционности тепловых процессов на графике отмечается некоторое запаздывание.
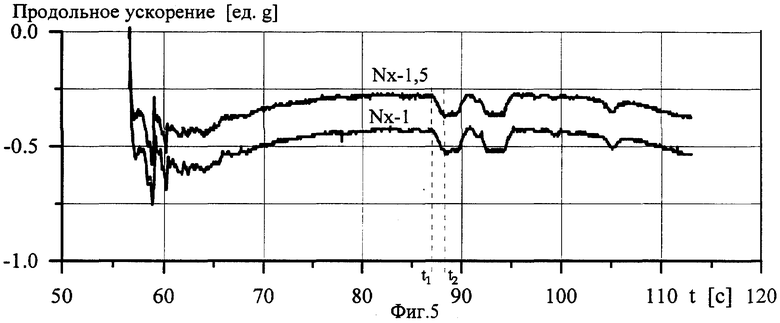
На фиг.5 изображен график изменения продольных ускорений гиперзвуковой летающей лаборатории, из которых следует, что в момент времени t1, при работающем двигателе, осевая перегрузка равна номинальному значению, а в момент времени t2, при неработающем двигателе, она уменьшается.
На фиг.6 изображен график распределения давлений по длине проточного тракта при работающем и неработающем двигателе ГЛЛ, из которого следует, что распределение давлений на головной части ГЛЛ совпадает.
Из анализа изменения параметров указанных фигур в моменты, когда топливные заслонки открыты, время t1, и когда топливные заслонки закрыты, время t2, расход топлива, давление в камере сгорания, температура стенки камеры сгорания и осевые перегрузки nxt1 и nxt2 существенно различны. Разность значений осевых перегрузок Δ nx=nxt1-nxt2 дает ускорение за счет силы от тяги ω R=Δ nx·g.
В моменты времени t1 и t2 уравнения сил, действующих на летающую лабораторию, записывают следующим образом:
Млл· nxt1·g=Rдвt1-Ra.c.+Rз.т. (1)
и
Млл· nxt2·g=Rдвt2-Ra.c.+Rз.т. (2),
где Млл - масса летающей лаборатории;
Ra.c. - сила аэродинамического сопротивления;
Rз.т. - сила земного тяготения;
nxt1 - продольная перегрузка в момент времени t1;
nxt2 - продольная перегрузка в момент времени t2;
g - ускорение земного тяготения.
Вычитая из уравнения (1) уравнение (2), получим
g· nxt1·Млл-g· nxt2·Млл=Rдвt1-Rдвt2,
где Rдвt2=0, так как отсутствует подача топлива;
Ra.c.=const;
Rз.т.=const.
В предлагаемом способе измерения тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) непилотируемой гиперзвуковой летающей лаборатории (ГЛЛ) принято, что летательный аппарат совершает полет в стационарном режиме, т.е. в моменты выключения и включения подачи топлива, не превышающее 1 секунды, не изменяются высота полета, углы атаки и скольжения и состояние атмосферы. Таким образом, уравнение сил, действующих на летающую лабораторию, записывают так
Rдвt1=g· Млл· (nxt1-nxt2),
Rдвt1=g· Млл· Δ nx
и получают тягу двигателя в полете
Rдвt1=Млл· ω R,
где Rдвt1 - тяга двигателя в момент времени t1,
Млл - масса летающей лаборатории,
ω R - ускорение летающей лаборатории под действием тяги двигателя.
Для контроля стационарного режима полета в предлагаемом способе определения тяги используют показания датчиков давления на поверхности планера в носовой части. Если эти показания остаются постоянными в моменты времени t1 и t2, то режим полета можно считать стационарным в течение времени, не превышающем 1 секунду.
В предлагаемом способе измерения тяги в полете ГПВРД непилотируемой ГЛЛ оптимальным образом сочетаются точность измерения тяги при минимальных изменениях программы управления в полете. Данный способ измерения тяги в полете может быть использован для непилотируемых гиперзвуковых летающих лабораторий (ГЛЛ) с прямоточными и ракетными двигателями.
Способ относится к авиадвигателестроению, а именно к гиперзвуковым прямоточным воздушно-реактивным двигателям (ГПВРД) и определению их тягово-экономических характеристик по результатам летных испытаний. В полете на летательный аппарат действуют одновременно силы аэродинамического сопротивления, земного тяготения и тяга двигателя. Для определения тяги двигателя необходимо разделение этих сил. Для этого производится выключение и включение подачи топлива в камеру сгорания в короткие, рядом стоящие промежутки времени, которые не превышают 1 (одну) секунду. Тогда разность ускорений (Δ nх·g) в эти промежутки времени дает значение ускорения за счет тяги двигателя в полете. Для повышения точности эта операция может быть повторена 2-3 раза и взято среднее значение ускорения ω R, по которому определяется тяга двигателя в полете с помощью указанного соотношения механики:
Кдвt1=Млл· ω R,
где Rдвt1 - тяга двигателя в момент времени t1,
Млл - масса летающей лаборатории,
ω R - ускорение летающей лаборатории под действием тяги двигателя.
Изобретение позволяет оптимизировать точность измерения тяги при минимальных изменениях программы управления в полете. Способ измерения тяги в полете может быть использован для непилотируемых гиперзвуковых летающих лабораторий (ГЛЛ) с прямоточными и ракетными двигателями. 1 з.п. ф-лы, 6 ил.
ω tl=nxt1·g,
измеряют продольное ускорение ГЛЛ при неработающем двигателе
ω t2=nxt2·g,
находят разность ускорений
ω R=ω tl-ω t2,
и тягу двигателя вычисляют по формуле
Rдв=Млл·ω R,
где ω t1 - ускорение ГЛЛ в момент t1;
ω t2 - ускорение ГЛЛ в момент t2;
nхt1 - сигнал датчика ускорения в момент времени t1;
nxt2 - сигнал датчика ускорения в момент времени t2;
Rдв - тяга двигателя;
Млл - масса летательного аппарата;
ω R - ускорение летательного аппарата под действием тяги двигателя.
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ОСТАНОВА ТКАЦКОГО СТАНКА ПРИ ОБРЫВЕ УТОЧНОЙ НИТИ | 0 |
|
SU342970A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОСТОГО СУПЕРФОСФАТА | 0 |
|
SU244344A1 |
| US 3465579 А, 09.09.1969 | |||
| US 3019604 А, 06.02.1962 | |||
| СОСТАВ ДЛЯ БЛОКИРОВАНИЯ ВОДОНОСНЫХ ПЛАСТОВ | 1996 |
|
RU2102595C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ АВИАЦИОННЫХ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1988 |
|
SU1572195A1 |
| Способ диагностирования неисправностей газотурбинных двигателей летательных аппаратов | 1989 |
|
SU1617317A1 |

