Область техники
Изобретение относится к авиадвигателестроению, а именно к новому направлению в нем - гиперзвуковым прямоточным воздушно-реактивным двигателям (ГПВРД), прежде всего к определению их тяговых характеристик по результатам летных испытаний двигателей на гиперзвуковой летающей лаборатории (ГЛЛ) с большим аэродинамическим качеством и с целью повышения точности определения силы тяги.
Уровень техники
Сила тяги ГПВРД является одной из важнейших летно-технических характеристик ГЛЛ. Серьезным препятствием, ограничивающим возможности определения тяговых характеристик таких двигателей на наземных стендах, является зависимость этих характеристик от условий обтекания ГЛЛ в натурных условиях, а также особенности интеграции двигателя с планером ГЛЛ: вся нижняя поверхность планера от носка до входа в ГПВРД профилируется как воздухозаборник, а кормовая часть от выхода из камеры сгорания до донного среза планера является соплом одностороннего расширения. Разумеется, при установке двигателя на другой планер изменяются не только аэродинамические характеристики ГЛЛ, но и тяговые характеристики ГПВРД. Воспроизведение на стенде реальных условий полета при больших скоростных напорах и высоких температурах технически трудно реализуемо, требует больших экономических затрат и в настоящее время практически невозможно.
Известен "Метод измерения тяги реактивного двигателя в реальном масштабе времени", патент ЕР №0342970 А2 от 19 мая 1988 г. В данном методе полная тяга двигателя определяется как разность общей силы, включающей подъемную силу самолета и силу аэродинамического сопротивления с учетом углов атаки и скольжения. Для определения этих составляющих в алгоритме расчетов используется большое количество измеряемых параметров, в том числе и перегрузок, измеряемых с помощью акселерометров.
Существенным недостатком данного метода является большая погрешность, которая обусловлена измерением в полете большого количества параметров, в том числе термодинамических параметров смеси газа: температур, показателей изоэнтропы (k), газовой постоянной (R), с учетом реального состава газа.
Наиболее близким техническим решением, принятым за прототип, является "Способ измерения тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) непилотируемой гиперзвуковой летающей лаборатории (ГЛЛ)", патент US №2242736 от 20 декабря 2004 г.
В данном способе тяга двигателя определяется по приращению продольного ускорения (вдоль оси oX1 ), создаваемого за счет действия силы тяги в полете. Для определения тяги двигателя производится разделение сил аэродинамического сопротивления вдоль продольной оси ГЛЛ, земного тяготения и тяги двигателя. С этой целью производится выключение и включение подачи топлива в камеру сгорания в короткие рядом стоящие промежутки времени t1 и t2, которые не превышают 1 с. Силу тяги двигателя определяют по формуле:
RДВ=mЛЛ·ωR
где mЛЛ - масса ГЛЛ,
ωR - ускорение ГЛЛ при действии силы тяги.
Ускорение ГЛЛ вычисляют по формуле:
ωR=(nxt1-nxt2)·g
где nxt1 и nxt2 - значения продольных перегрузок в моменты времени t1 и t2,. Недостатком этого способа является то, что при выключении и включении двигателя нарушается стационарный режим работы двигателя и полета ГЛЛ, в показаниях акселерометра присутствует составляющая перегрузки от силы лобового сопротивления, которая может быть достаточно велика при больших скоростных напорах. Это приводит к необходимости выбирать акселерометр с большим диапазоном измерений, что приведет к дополнительной динамической погрешности, в особенности при определении малой силы тяги. Кроме того, в случае летных испытаний ГЛЛ с большим аэродинамическим качеством выключение и включение двигателя приведет к дополнительным колебаниям ГЛЛ в продольной плоскости (по углу атаки). По показаниям одного такого акселерометра нельзя судить, по какой причине произошло изменение перегрузки: или колебаний угла атаки, или изменений силы тяги двигателя. При повторном выключении-включении двигателя задний фронт предыдущего импульса, т.е. импульса последействия, может быть достаточно продолжительным, что внесет дополнительную погрешность в величину определяемой силы тяги, т.к. импульс тяги и, соответственно, импульс перегрузки при повторном включении будет отсчитываться от остаточного уровня предыдущего импульса, что снижает точность измерений силы тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя гиперзвуковой летающей лаборатории, в особенности ГЛЛ с большим аэродинамическим качеством.
Раскрытие изобретения
Технической задачей предлагаемого способа является измерение силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя при проведении летных испытаний гиперзвуковой летающей лаборатории с большим аэродинамическим качеством, повышение точности и достоверности определения силы тяги.
Технический результат достигается за счет измерения перегрузки, создаваемой действием силы тяги двигателя в полете в строго определенном направлении.
При строго определенном повороте измерительной оси акселерометра исключается в его показаниях составляющая от действия суммарных аэродинамических сил и остается составляющая только от силы тяги. Это позволяет использовать акселерометр с меньшим диапазоном измерений, выбранный на диапазон перегрузок только от силы тяги, и за счет этого повысить точность измерений, что особенно важно при определении малой силы тяги. При этом дается формула для вычисления угла поворота измерительной оси (оси чувствительности) в зависимости от аэродинамических характеристик ГЛЛ. При постоянной величине силы тяги и отсутствии высокочастотных колебаний угла атаки в телеметрической записи сигнала с этого акселерометра будет сохраняться практически постоянный уровень. Показания двух других акселерометров позволяют оценить составляющую перегрузки от колебаний угла атаки и одновременно возможных пульсаций силы тяги двигателя. Даются также формулы для вычислений углов ориентации измерительных осей этих акселерометров (углов установки), образующих ортогональную систему координат, в зависимости от аэродинамических характеристик ГЛЛ. Важно, что при использовании предложенного способа не нарушается стационарный режим работы двигателя, так как не требуется его кратковременное отключение.
Для получения указанного технического результата в предлагаемом способе определения силы тяга гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) по результатам летных испытаний его на гиперзвуковой летающей лаборатории, включающим измерение перегрузки, разделение сил аэродинамического сопротивления вдоль связанной оси ГЛЛ, земного тяготения и тяги двигателя, определение ускорения от силы тяги в полете, согласно изобретению измерительные оси акселерометров устанавливают под углами относительно строительной оси oX1 ГЛЛ, определяемыми из условий равенства нулю проекции вектора полной аэродинамической силы при непрерывной работе двигателя, минимальной и максимальной чувствительности акселерометров к колебаниям угла атаки с целью исключения составляющей от аэродинамической силы. Для этого предварительно по известным аэродинамическим характеристикам ГЛЛ с большим аэродинамическим качеством вычисляют в соответствии с указанными условиями значения углов установки трех акселерометров относительно строительной оси oX1 ГЛЛ по формулам:

где
αD, αDX1, αDY1 - углы наклона измерительных осей трех акселерометров относительно строительной оси оХ1 ГЛЛ, вычисленные по соответствующим формулам (1, 2, 3),
K - аэродинамическое качество,
α - угол атаки,

 - частные производные по углу атаки от соответствующих аэродинамических коэффициентов. Такое техническое решение позволяет повысить точность определения силы тяги.
- частные производные по углу атаки от соответствующих аэродинамических коэффициентов. Такое техническое решение позволяет повысить точность определения силы тяги.
Согласно расчетным углам устанавливают акселерометры в центре масс ГЛЛ. По результатам измерений перегрузок в полете вычисляют силу тяги двигателя по формуле:
где
ϕ - угол поворота вектора силы тяги относительно строительной оси oX1 ГЛЛ,
nDT - среднее за период колебаний угла атаки значение перегрузки, зафиксированное первым акселерометром с углом наклона αD. При этом, если в показаниях третьего акселерометра с углом наклона αDY1 присутствуют высокочастотные колебания перегрузки от колебаний угла атаки, а в показаниях второго акселерометра с углом наклона αDX1 они отсутствуют, используют значение nDT.
При отсутствии высокочастотных колебаний угла атаки также используют значение перегрузки Яду на первом датчике, которое будет сохраняться постоянным и зависящим только от силы тяги двигателя.
Такое решение позволяет разделить в показаниях акселерометров составляющие перегрузки от колебаний угла атаки и возможных пульсаций тяги двигателя, что дает возможность в первую очередь ответить на вопрос: в полете происходят высокочастотные колебания аэродинамических сил или силы тяги двигателя вследствие нестационарности в его работе.
Заявляемое решение дает возможность повысить точность и достоверность определения силы тяги двигателя при его нестабильной работе и при высокочастотных колебаниях угла атаки ГЛЛ.
Перечень фигур на чертежах
Изобретение поясняется чертежами.
На фиг.1 показана схема ориентации измерительных осей акселерометров в продольной плоскости относительно связанных осей oX1Y1 ГЛЛ:
1 - ГЛЛ, 2 - экспериментальный ГПВРД;
показаны ортогональные системы координат oXY с соответствующими индексами:
oXY - скоростная система координат, ось оХ повернута на угол атаки α, по осям oX и oY направлены сила лобового сопротивления Q и подъемная сила Y;
oXpYp - по оси оХр под углом ϕ направлена сила тяги Р;
оХDУD - по оси оХD под углом αD направлена ось чувствительности первого акселерометра, вдоль которой равна нулю перегрузка от проекции вектора полной аэродинамической силы;
oXDX1 YDY1 по оси oXDX1 под углом αDX1 направлена ось чувствительности второго акселерометра, вдоль которой вариации угла атаки не влияют на показания акселерометра (минимальная чувствительность акселерометра к колебаниям угла атаки ), по оси oYDY1 под углом αDy1 направлена ось чувствительности третьего акселерометра, вдоль которой в максимальной степени влияют вариации угла атаки (максимальная чувствительность акселерометра к колебаниям угла атаки ).
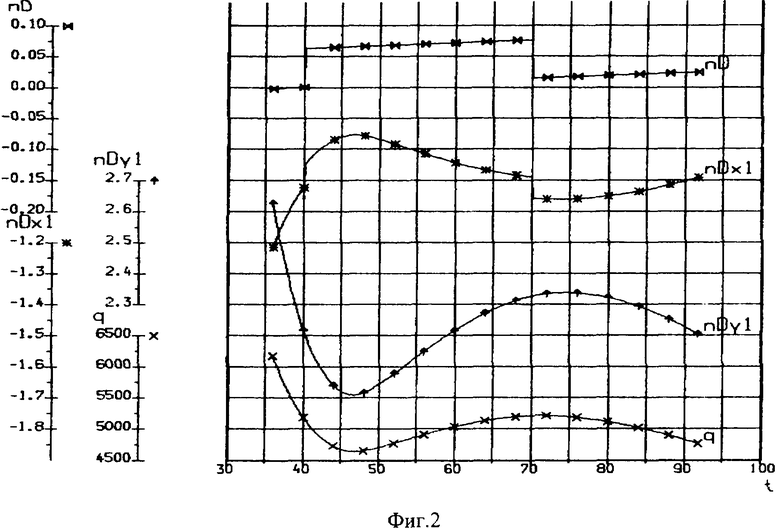
На фиг.2 показаны изменения по времени скоростного напора q на экспериментальном участке полета, перегрузки nD по оси оХD, в направлении которой равна нулю проекция вектора полной аэродинамической силы, перегрузки nDY1 по оси oYDY1, в направлении которой в максимальной степени влияют вариации угла атаки, перегрузки nDX1 по оси oXDX1, в направлении которой вариации угла атаки не влияют.
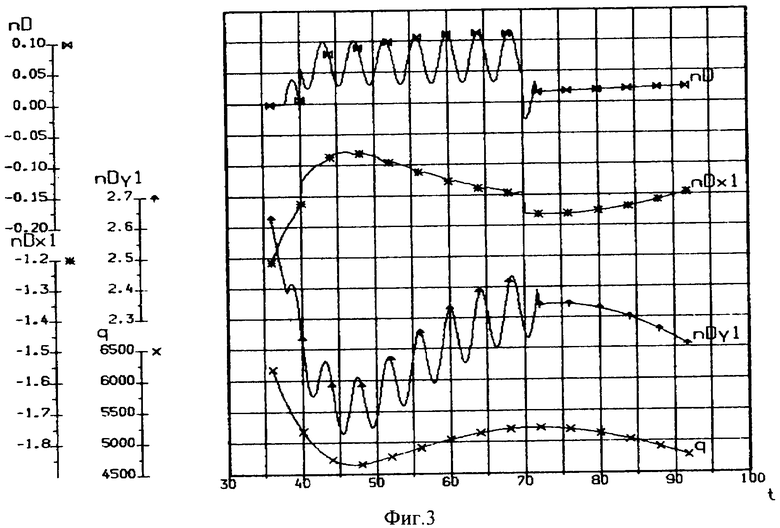
На фиг.3 показаны, при наличии высокочастотных колебаний по углу атаки ГЛЛ с большим аэродинамическим качеством, изменения по времени скоростного напора q на экспериментальном участке полета, перегрузки nD по оси оХD, в направлении которой равна нулю проекция вектора полной аэродинамической силы, перегрузки nDY1 по оси oYDY1, в направлении которой в максимальной степени влияют вариации угла атаки, перегрузки nDX1 по оси оХDX1, в направлении которой вариации угла атаки не влияют.
Предлагаемый способ осуществляют в следующей последовательности.
Способ определения силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) по результатам летных испытаний его на гиперзвуковой летающей лаборатории (ГЛЛ) осуществляют в следующей последовательности, включающей измерение перегрузки, разделение сил аэродинамического сопротивления, земного тяготения и тяги двигателя вдоль связанных осей ГЛЛ, определение ускорения от силы тяги двигателя.
Предварительно, по известным аэродинамическим характеристикам ГЛЛ с большим аэродинамическим качеством, вычисляют значения углов наклона измерительных осей трех акселерометров относительно строительной оси oX1 соответственно из условий равенства нулю вектора полной аэродинамической силы, минимальной и максимальной чувствительности акселерометров к колебаниям угла атаки, которые определяют по частным производным по углу атаки от аэродинамических коэффициентов, определяют углы наклона измерительных осей акселерометров относительно строительной оси oX1 ГЛЛ по формулам:

где
αD, αDX1, αDY1 - углы наклона измерительных осей трех акселерометров относительно строительной оси оХ1 ГЛЛ, вычисленные по соответствующим формулам (1, 2, 3),
K - аэродинамическое качество,
α - угол атаки,

 - частные производные по углу атаки от соответствующих аэродинамических коэффициентов.
- частные производные по углу атаки от соответствующих аэродинамических коэффициентов.
Затем, согласно расчетным углам, устанавливают акселерометры в центре масс ГЛЛ (см. фиг.1).
По результатам измерений перегрузок в полете вычисляют силу тяги двигателя по формуле:
ϕ - угол поворота вектора силы тяги относительно строительной оси oX1 ГЛЛ,
nDT - среднее за период колебаний угла атаки значение перегрузки, зафиксированное первым акселерометром с углом наклона αD.
Пример 1.
Для проверки предложенного способа определения силы тяги двигателя проведена обработка показаний акселерометров, полученных при математическом моделировании пространственного движения ГЛЛ. Используются результаты моделирования траектории на экспериментальном участке (интервал времени 40...70 с). Приняты исходные данные: Р = 100 кгс, ϕ = 0°, G = 1451 кг, заданы аэродинамические характеристики ГЛЛ в зависимости от числа М и угла атаки. Представлены результаты обработки аналитических зависимостей для определения углов поворота осей чувствительности акселерометров и результаты математического моделирования пространственного движения ГЛЛ.
Для рассматриваемой компоновки ГЛЛ получено: αD = -24.8°, αDx1 = -2.2°, αDy1 = -92.2°; все оси чувствительности - вверх относительно строительной оси ГЛЛ.
Результаты математического моделирования представлены на фиг.2.
По показаниям акселерометра αD в процессе послеполетной обработки вычисляется значение силы тяги по предлагаемой формуле (4). Для представленных результатов моделирования получим Р = 99.7 кгс, что практически совпадает с исходным значением (Р = 100 кгс).
Пример 2.
Показывает определение силы тяги двигателя при наличии в полете высокочастотных колебаний угла атаки ГЛЛ. Приняты те же исходные данные, что и для примера 1. Дополнительно при моделировании в исходных данных заданы высокочастотные синусоидальные колебания угла атаки (см. фиг.3). При этом в показаниях третьего акселерометра с углом наклона αDY1 присутствуют высокочастотные колебания перегрузки с максимальной амплитудой от колебаний угла атаки, а в показаниях второго акселерометра с углом наклона αDX1 они отсутствуют, как показано на фиг.3. Следовательно, происходят высокочастотные колебания перегрузки только угла атаки при постоянной тяге двигателя, что будет зафиксировано при проведении летных испытаний ГЛЛ, и при определении силы тяги двигателя необходимо использовать среднее за период значение перегрузки nDT.
Предложенный способ определения силы тяги может быть использован при осуществлении полетов летательных аппаратов с прямоточными и ракетными двигателями.
Изобретение относится к авиадвигателестроению, а именно к гиперзвуковым прямоточным воздушно-реактивным двигателям (ГПВРД), и может быть использовано для определения их тягово-экономических характеристик по результатам летных испытаний. Способ включает измерение перегрузки, разделение сил аэродинамического сопротивления вдоль связанной оси ГЛЛ, земного тяготения и тяги двигателя и определение ускорения от силы тяги в полете. Предварительно, по известным аэродинамическим характеристикам ГЛЛ, вычисляют значения углов ориентации измерительных осей трех акселерометров относительно строительной оси oX1 ГЛЛ соответственно из условий равенства нулю вектора полной аэродинамической силы, минимальной и максимальной чувствительности акселерометров к колебаниям угла атаки, которые определяют по частным производным по углу атаки от аэродинамических коэффициентов. Затем согласно расчетным углам устанавливают акселерометры в центре масс ГЛЛ. По результатам измерений перегрузок в полете вычисляют силу тяги двигателя. Технический результат заключается в повышении точности и достоверности определения силы тяги двигателя при его нестабильной работе и при высокочастотных колебаниях угла атаки ГЛЛ. 3 ил.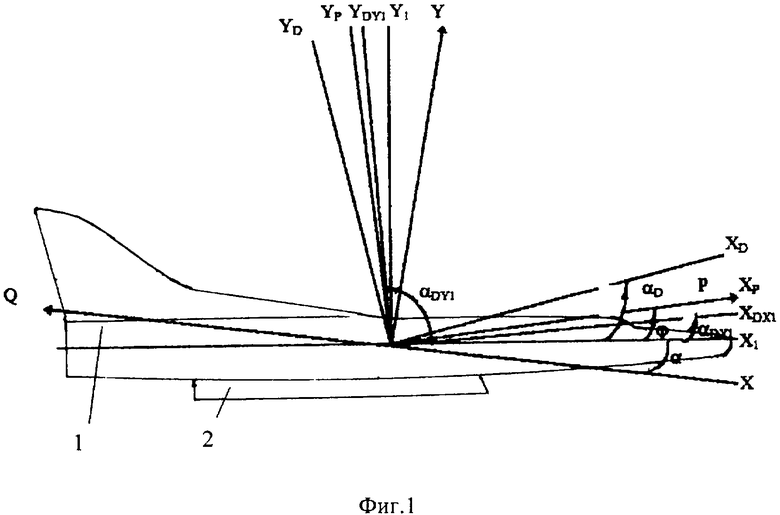
Способ определения силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя по результатам летных испытаний его на гиперзвуковой летающей лаборатории (ГЛЛ), включающий измерение перегрузки, разделение сил аэродинамического сопротивления вдоль связанной оси ГЛЛ, земного тяготения и тяги двигателя, определение ускорения от силы тяги в полете, отличающийся тем, что измерительные оси акселерометров устанавливаются под углами относительно строительной оси oX1 ГЛЛ, определяемыми из условий равенства нулю проекции вектора полной аэродинамической силы при непрерывной работе двигателя, минимальной и максимальной чувствительности акселерометров к колебаниям угла атаки с целью исключения составляющей от аэродинамической силы, для этого предварительно, по известным аэродинамическим характеристикам ГЛЛ с большим аэродинамическим качеством, вычисляют в соответствии с указанными условиями значения углов установки трех акселерометров относительно строительной оси oX1 ГЛЛ по формулам



где αD, αDX1, αDY1 - углы наклона измерительных осей трех акселерометров относительно строительной оси oX1 ГЛЛ, вычисленные по соответствующим формулам (1, 2, 3);
K - аэродинамическое качество;
α - угол атаки;
Сα X, Cα Y - частные производные по углу атаки от соответствующих аэродинамических коэффициентов,
затем, согласно расчетным углам, устанавливают акселерометры в центре масс ГЛЛ, по результатам измерений перегрузок в полете вычисляют силу тяги двигателя по формуле
 ,
,
где ϕ - угол поворота вектора силы тяги относительно строительной оси oX1 ГЛЛ;
nDT - среднее за период колебаний угла атаки значение перегрузки, зафиксированное первым акселерометром с углом наклона αD,
при этом, если в показаниях третьего акселерометра с углом наклона αDY1, присутствуют высокочастотные колебания перегрузки от колебаний угла атаки, а в показаниях второго акселерометра с углом наклона αDX1 они отсутствуют, используют значение nDT, при отсутствии высокочастотных колебаний угла атаки также используют значение перегрузки nDT на первом датчике, которое будет сохраняться постоянным и зависящим только от силы тяги двигателя.
| СПОСОБ ИЗМЕРЕНИЯ ТЯГИ В ПОЛЕТЕ ГИПЕРЗВУКОВОГО ПРЯМОТОЧНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ (ГПВРД) НЕПИЛОТИРУЕМОЙ ГИПЕРЗВУКОВОЙ ЛЕТАЮЩЕЙ ЛАБОРАТОРИИ (ГЛЛ) | 2003 |
|
RU2242736C2 |
| RU 2059252 С1, 27.04.1996. | |||

