Предлагаемое изобретение относится к тормозному оборудованию моторвагонного подвижного состава, преимущественно электропоездов, и предназначено для обеспечения безопасности движения за счет применения совершенной системы управления и контроля тормозных средств.
Известен электропневматический тормоз секционного электропоезда (Албегов Н.А. и др. Электропневматические тормоза. Транспорт. – 1970, с.84, рис.66.), содержащий тормозной переключатель барабанного типа, кран машиниста с контроллером, катушки электропневматических реле торможения Т и перекрыши П в составе электровоздухораспределителя, сигнальные лампы контроля цепи и торможения (рис.66, с.84); для управления используется четырехпроводная система в составе проводов: обратного, блокировочного, тормозного и перекрыши.
Известен также электропневматический тормоз электропоезда серии ЭР2 (Крылов В.И., Крылов В.В. Автоматические тормоза подвижного состава. - М.: Транспорт, 1983, с.183-187, рис.157), содержащий вышеперечисленные элементы, в схеме которого используется пятипроводная система (рис.157, с.185) в составе проводов: обратного, контрольного, тормозного, перекрыши и сигнального; дополнительный сигнальный провод связан с пневмоэлектрическим реле СОТ тормозного цилиндра и сигнальной лампой ЛСЗ неотпуска тормозов.
Известным схемам электропневматического тормоза присущи следующие недостатки.
У тормоза с четырехпроводной схемой отсутствует контроль состояния тормозов поезда по срабатыванию и отпуску; у тормоза с пятипроводной схемой применение одного замыкающего контакта пневмоэлектрического реле тормозного цилиндра и способа подключения реле к цепи сигнального провода позволяют определить только полный отпуск тормозов в поезде при отсутствии контроля полного их срабатывания.
Отсутствие контроля срыва стоп-крана или разрыва тормозной магистрали приводит к возникновению существенных продольно-динамических реакций в поезде, вызванных экстренным пневматическим торможением в чрезвычайной ситуации.
В случае управления электропневматическими тормозами без снижения давления в тормозной магистрали автоматическое торможение, вызванное срывом стоп-крана или разрывом тормозной магистрали, может привести к заклиниванию колесных пар, массовому повреждению поверхности катания колес и рельсов.
При смене кабины управления моторвагонного поезда в соответствии с Инструкцией (Инструкция по эксплуатации тормозов подвижного состава железных дорог. ЦТ-ЦВ-ЦЛ-ВНИИЖТ/277. 2002, с.73.) в оставляемой кабине управления требуется отключить источник питания электропневматического тормоза, ручку крана машиниста перевести в V положение (торможение) и после снижения давления в уравнительном резервуаре на 1,3-1,5 кгс/см2 (полное служебное торможение, с.73) - в IV положение (перекрыша); затем перекрыть разобщительные краны на тормозной и питательной магистралях, а ручку крана машиниста установить в VI положение (экстренное торможение).
Недостатком известных схем является также невозможность приведения в действие электропневматического тормоза нерабочей кабины, что приводит к вынужденному его выключению при смене кабины управления; в этом случае основным средством закрепления электропоезда остается торможение пневматическим тормозом, который является истощимым и при перекрытии разобщительных кранов переходит в состояние самопроизвольного отпуска, что приводит к несанкционированному перемещению подвижного состава.
Перечисленные недостатки известных схем электропневматического тормоза составляют прямую угрозу безопасности движения, что подтверждается анализом случаев транспортных происшествий.
Целью предлагаемого изобретения является повышение безопасности движения за счет применения электропневматического тормоза, свободного от указанных недостатков, который обеспечивает полный контроль состояния тормозов поезда и контроль срыва стоп-крана в поезде с автоматическим переходом при этом на электропневматическое торможение, предотвращает заклинивание колесных пар при совместном применении электропневматического и автоматического тормозов, а при выполнении всех необходимых действий по смене кабины управления позволяет привести в действие электропневматический тормоз от нерабочей кабины (ЭПТ-блокировка).
Поставленная цель достигается тем, что в сигнальной цепи установлено пневмоэлектрическое реле тормозного цилиндра с переключающими контактами, в цепи управления электропневматическим тормозом установлено пневмоэлектрическое реле тормозной магистрали, в электрической цепи торможения установлено пневмоэлектрическое реле тормозного цилиндра максимально допустимого давления, а в цепи питания электропневматического тормоза установлен переключатель режима работы.
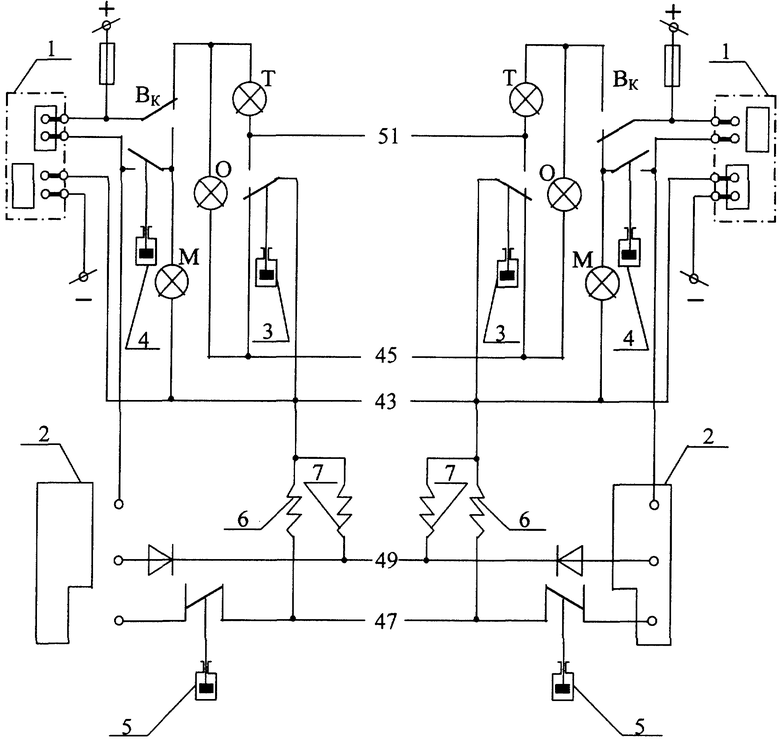
На рисунке представлена схема предлагаемого электропневматического тормоза электропоезда, который содержит тормозной электрический переключатель 1 цепи питания, контроллер управления электропневматическим тормозом 2 крана машиниста, пневмоэлектрическое реле 3 тормозного цилиндра с уставкой на 0,3-0,4 кгс/см2, пневмоэлектрическое реле 4 тормозной магистрали с уставкой на 4,0 кгс/см2, пневмоэлектрическое реле 5 тормозного цилиндра с уставкой на 4,0 кгс/см2, электропневматическое реле торможения 6 и электропневматическое реле перекрыши 7, переключатель режима работы Вк и сигнальные лампы магистрали М, торможения Т и отпуска О; на рисунке принято обозначение проводов электропневматического тормоза в соответствии с технической документацией на электропоезд серии ЭР2: 43 – обратный, 45 - контрольный отпускной, 47 - тормозной, 49 - перекрыши, 51 - сигнальный тормозной. Левая часть рисунка относится к рабочей кабине, правая часть - к нерабочей кабине.
Предлагаемый электропневматический тормоз действует следующим образом.
В исходном состоянии, как представлено на рисунке, переключатель режима работы Вк рабочей кабины подает питание на цепь контроля, содержащую сигнальные лампы отпуска и торможения (О и Т); переключатель режима работы Вк нерабочей кабины подает питание на цепь сигнальной лампы магистрали М и контроллер управления электропневматическим тормозом 2 через контакты пневмоэлектрического реле 4 тормозной магистрали, состояние контактов которого на рисунке 1 соответствует нормальному зарядному давлению.
Контроль состояния тормозов электропоезда. При полном отпуске переключающие контакты всех пневмоэлектрических реле 3 находятся в нижнем положении, в кабине управления горит сигнальная лампа отпуска О, тормозная сигнальная лампа Т не горит; в случае неотпуска тормоза хотя бы одного вагона горят обе сигнальные лампы О и Т.
При торможении контроллер управления электропневматическим тормозом 2 перемещают в тормозную позицию (тормозная позиция контроллера управления электропневматическим тормозом 2 представлена в нерабочей кабине), а затем в положение перекрыши, при котором остается питание тормозного провода 47 от контроллера управления электропневматическим тормозом 2; после торможения контакты пневмоэлектрического реле 3 перемещаются в верхнее положение и замыкают цепь питания тормозной сигнальной лампы Т; при полном торможении в кабине управления горит сигнальная лампа Т; в случае неполного срабатывания тормозов поезда горят обе сигнальные лампы Т и О.
Полное срабатывание тормозов в поезде контролируется погасанием сигнальной лампы О, а полный отпуск - погасанием сигнальной лампы Т.
Контроль срыва стоп-крана или разрыва тормозной магистрали поезда.
В случае срыва стоп-крана или разрыва тормозной магистрали происходит срабатывание автоматических тормозов, загорается сигнальная лампа торможения Т; резкое падение давления в тормозной магистрали вызовет срабатывание пневмоэлектрического реле 4, контакты которого замыкают цепь питания сигнальной лампы М в рабочей кабине, а пневмоэлектрическое реле 4 нерабочей кабины через контакты контроллера управления электропневматическим тормозом 2 подключит электропневматические реле 6 и 7, осуществив переход на электропневматическое торможение.
Предотвращение заклинивания колесных пар.
Если электропневматическое торможение производится без выпуска сжатого воздуха из тормозной магистрали, то продолжительное нахождение ручки крана машиниста в тормозном положении и последующий срыв стоп-крана или разрыв тормозной магистрали вызывают заклинивание колесных пар. Предотвращение заклинивания достигается с помощью пневмоэлектрического реле 5, которое размыкает цепь торможения (провод 47) при отрегулированном давлении, например, 4,0 кгс/см2, прекращая дальнейшее питание тормозного цилиндра.
Смена кабины управления электропоездом.
При смене кабины управления приводят в действие автоматические и электропневматические тормоза одновременным переводом ручки крана машиниста и контроллера управления электропневматическим тормозом 2 в тормозное положение (тормозная позиция контроллера управления электропневматическим тормозом 2 представлена а нерабочей кабине); снижение давления в тормозной магистрали до 4,0 кгс/см2 контролируется по загоранию сигнальной лампы М, а срабатывание тормозов - по загоранию сигнальной лампы Т и погасанию сигнальной лампы О в оставляемой кабине; затем меняют положение контактов переключателя режима работы Вк и тормозного электрического переключателя 1 барабанного типа. При этом в заторможенном состоянии будут находиться автоматический и электропневматический тормоза за счет питания от контроллеров управления электропневматическим тормозом 2 обоих кранов машиниста, что обеспечит надежное закрепление поезда и безопасную смену кабины управления за счет устранения возможности несанкционированного движения.
Таким образом, предлагаемый электропневматический тормоз моторвагонного поезда обладает новизной и полезностью.
Источники, принятые во внимание
1. Албегов Н.А. и др. Электропневматические тормоза. Транспорт. – 1970, с.84, рис.66.
2. Крылов В.И., Крылов В.В. Автоматические тормоза подвижного состава. М.: Транспорт, 1983, с.183-187, рис.185.
3. Инструкция по эксплуатации тормозов подвижного состава железных дорог. ЦТ-ЦВ-ЦЛ-ВНИИЖТ/277. – 2002, с.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ТОРМОЗОВ ПОЕЗДА | 2005 |
|
RU2298496C2 |
| Устройство для управления электропневматическим тормозом | 1984 |
|
SU1232533A1 |
| БЛОК АДАПТИВНОГО УПРАВЛЕНИЯ ТОРМОЗОМ ТЕЛЕЖКИ | 2012 |
|
RU2524751C1 |
| ЭЛЕКТРИЧЕСКАЯ СХЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КРАНОМ МАШИНИСТА С ИСТОЧНЙКО;л ПИТАНИЯ | 1973 |
|
SU382534A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 2010 |
|
RU2428333C1 |
| СПОСОБ ДЕЙСТВИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО ТОРМОЗА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2392141C1 |
| Сигнализатор обрыва тормозной магистрали поезда | 1982 |
|
SU1062072A1 |
| Сигнализатор обрыва тормозной магистрали поезда | 1984 |
|
SU1162649A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНЫХ ПОДВИЖНЫХ ЕДИНИЦ | 2002 |
|
RU2243913C2 |
| СИГНАЛИЗАТОР ДЕЙСТВИЯ ТОРМОЗОВ МОТОР-ВАГОННОГО ПОЕЗДА | 1992 |
|
RU2030313C1 |
Изобретение относится к тормозному оборудованию моторвагонного подвижного состава, преимущественно электропоездов, и предназначено для обеспечения безопасности движения за счет применения совершенной системы управления и контроля тормозных средств. Электропневматический пятипроводный тормоз моторвагонного подвижного состава содержит тормозной переключатель барабанного типа, кран машиниста с контроллером управления электропневматическим тормозом, катушки электропневматических реле торможения и перекрыши в составе электровоздухораспределителя, сигнальные лампы и пневмоэлектрическое реле тормозного цилиндра. В сигнальной цепи на тормозных цилиндрах вагонов установлены пневмоэлектрические реле с переключающими контактами на сигнальные лампы торможения и отпуска. В цепи питания электропневматического тормоза установлено пневмоэлектрическое реле, замыкающее цепь сигнальной лампы магистрали при понижении в ней давления ниже 4,0 кгс/см2. В цепи торможения электропневматическим тормозом каждой кабины установлены пневмоэлектрические реле тормозных цилиндров головных вагонов поезда, контакты которых размыкают цепь торможения при достижении установленного максимального давления в тормозных цилиндрах. В цепи питания электропневматического тормоза установлен переключатель режима работы, контакты которого в рабочей кабине подключают питание цепи сигнальных ламп торможения и отпуска, а в нерабочей кабине подключают питание сигнальной лампы магистрали. Технический результат - повышение безопасности движения за счет применения электропневматического тормоза, который обеспечивает полный контроль состояния тормозов поезда и контроль срыва стоп-крана в поезде с автоматическим переходом при этом на электропневматическое торможение, предотвращает заклинивание колесных пар при совместном применении электропневматического и автоматического тормозов, а при выполнении всех необходимых действий по смене кабины управления позволяет привести в действие электропневматический тормоз от нерабочей кабины (ЭПТ-блокировка). 1 ил.
Электропневматический пятипроводный тормоз моторвагонного подвижного состава, содержащий тормозной переключатель барабанного типа, кран машиниста с контроллером управления электропневматическим тормозом, катушки электропневматических реле торможения и перекрыши в составе электровоздухораспределителя, сигнальные лампы и пневмоэлектрические реле тормозного цилиндра, отличающийся тем, что, с целью повышения безопасности движения, в сигнальной цепи на тормозных цилиндрах вагонов установлены пневмоэлектрические реле с переключающими контактами на сигнальные лампы торможения и отпуска, в цепи питания электропневматического тормоза установлено пневмоэлектрическое реле, замыкающее цепь сигнальной лампы магистрали при понижении в ней давления ниже 4,0 кгс/см2, в цепи торможения электропневматическим тормозом каждой кабины установлены пневмоэлектрические реле тормозных цилиндров головных вагонов поезда, контакты которых размыкают цепь торможения при достижении установленного максимального давления в тормозных цилиндрах, а в цепи питания электропневматического тормоза установлен переключатель режима работы, контакты которого в рабочей кабине подключают питание цепи сигнальных ламп торможения и отпуска, а в нерабочей кабине подключают питание сигнальной лампы магистрали.
| Инструкция по эксплуатации тормозов подвижного состава железных дорог, ЦТ-ЦВ-ЦЛ-ВНИИЖТ/277, 2002, с.73 | |||
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 1994 |
|
RU2093390C1 |
| Устройство для определения моментов экстремумов гармонического сигнала | 1980 |
|
SU941904A1 |
| US 5412572 А, 02.05.1995 | |||
| DE 3831492 С, 21.12.1989. | |||

