Данное изобретение относится к способу и устройству для определения местоположения транспортного средства на определенной территории, в частности на складе, а также системе и способу управления складом.
DE 4429016 А1 раскрывает устройство и способ для определения местоположения автоматически управляемого транспортного средства. В этом случае модуль и угол инкрементных перемещений от движения транспортного средства определяются посредством интегрального навигационного устройства. Далее соответствующее контрольное положение транспортного средства определяется автоматически в определенных точках в пределах определенной территории с помощью камеры ПЗС всякий раз, когда транспортное средство проходит соответствующую точку. Далее текущее положение транспортного средства на определенной территории определяется векторным суммированием определенных инкрементных векторов перемещений посредством блока оценки для получения вектора положения, относящегося к текущему контрольному положению. Определение положения и ориентации, описанное здесь, к сожалению, реализуется с помощью очень дорогой камеры ПЗС и высококонтрастных средств освещения в виде ламп на потолке. Отказ ламп приводит к невозможности определить местоположение.
DE 3490712 С2 раскрывает систему контроля и управления транспортным средством с устройством управления движением транспортного средства, рулевой механизм для управления траекторией движения транспортного средства, интегральное навигационное устройство для вычисления местоположения траектории транспортного средства на инкрементной основе, устройство для сохранения нужного маршрута для транспортного средства, устройство по управлению движением транспортного средства и рулевым механизмом в целях направления транспортного средства по нужному маршруту и устройство для сохранения положения одного или нескольких фиксированных контрольных пунктов назначения.
DE 3538908 А1 раскрывает автономную бортовую систему определения местоположения для определения местоположения и защиты от столкновений транспортных роботов и тягачей на определенных маршрутах, основанную на интегральном навигационном способе. Текущая широта и долгота определяются непрерывно посредством дополнительной схемы, с использованием, по крайней мере, одного дистанционного датчика в системе. Эти данные датчиков обрабатываются таким образом, что генерируется сигнал управления для безопасного направления транспортного средства посередине маршрута.
DE 4039887 А1 раскрывает еще одну систему управления транспортным средством и маршрутизации.
Хотя настоящее изобретение может использоваться для любых пригодных транспортных средств и территорий, оно, также как и проблемы, на которых оно основывается, будет описано в отношении двух вильчатых автопогрузчиков на территории склада, являющихся компонентами системы управления складом.
Система управления складом осуществляет мониторинг, управление, документирование и анализ движения товаров в складских хранилищах. Транспортные средства, например вильчатые автопогрузчики, обычно используются для перемещения товаров.
Важными факторами, которые определяют качество такой системы, являются время доступа, время обнаружения и точность, с которой определяется место хранения. В качестве примера можно привести одну известную систему, которая использует постоянные предопределенные маршруты следования транспортирующих средств, например рельсовых, и датчики положения, установленные на них.
Такой известный подход, как оказалось, имеет недостаток, заключающийся в том, что могут использоваться только предопределенные маршруты, а установка и переоснащение вызывают необходимость в сложных изменениях системы.
Система с бесконтактным определением местоположения, например известная система ГПС (Глобальная (спутниковая) Система Местоопределения), была бы более целесообразной. Местоположения в складских пространствах, которые необходимо определять, характеризуются сантиметровым диапазоном и меньше (например, диапазон 40 см для Европейских стандартных паллет). Такая высокая разрешающая способность не может быть достигнута с помощью известной дифференциальной системы ГПС, разрешающая способность которой обычно составляет только около 1 м. Более того, система ГПС не может использоваться внутри закрытых помещений из-за экранирующего эффекта.
Одной из целей настоящего изобретения, таким образом, является разработка способа и устройства для определения местоположения транспортного средства на определенной территории, в частности на складах, которые позволяют более точно и надежно определять местоположения и требуют только минимального переоснащения территорий или складских помещений. Следующей целью является разработка системы и способа по управлению складом.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
Способ согласно изобретению, имеющий признаки, раскрытые в п.1 формулы, так же как и соответствующее устройство, заявленное в п.6 формулы, имеют в отличие от известных решений преимущество, состоящее в том, что они позволяют с высокой точностью и надежностью определять местоположение, а также требуют незначительного переоснащения существующий территории или территории склада. Переоснащение выполняется без проблем, как дополнение к исходному оборудованию.
Идея, на которой основано настоящее изобретение, состоит в автоматическом определении соответствующего контрольного положения транспортного средства в предопределенных точках в пределах определенной территории всякий раз, когда транспортное средство проходит соответствующую точку. Автоматическое определение соответствующего контрольного положения транспортного средства в предопределенных точках реализуется посредством второго устройства датчиков, которое установлено на транспортном средстве и взаимодействует бесконтактным способом с соответствующей контрольной меткой в соответствующей точке в пределах определенной территории. Контрольная метка имеет отражающую и не отражающую области, которые одновременно сканируются транспортным средством посредством двух сигналов, с координатами контрольного положения, причем угол движения определяется путем оценки временного графика интенсивности отраженных сигналов.
Зависимые пункты формулы относятся к предпочтительным воплощениям и улучшенным вариантам изобретения.
Согласно одному из предпочтительных воплощений, носителями сигналов являются световые лучи, предпочтительней лазерные лучи или силовые линии магнитной индукции.
Согласно следующему предпочтительному воплощению, контрольная метка представляет собой прямоугольную полоску, которая имеет две отражающие и одну неотражающую область вдоль диагонали прямоугольника, под которым движется транспортное средство. Эта контрольная метка позволяет получить аналитическое решение для определения координат контрольного положения и угла движения путем оценки временного графика интенсивности отраженного сигнала.
Согласно следующему предпочтительному воплощению, модуль и угол инкрементных векторов движения, относящихся к движению транспортного средства, определяются посредством первого устройства датчиков, которое устанавливается на транспортном средстве. Оно предпочтительно включает гиратор для определения угла и кодирующее устройство для определения модуля.
Согласно следующему предпочтительному воплощению, автоматическое определение относительного контрольного положения транспортного средства реализуется таким образом, что статистическое отклонение между определенным текущим положением и реальным положением не превосходит определенной величины.
ФИГУРЫ ЧЕРТЕЖЕЙ
Примеры воплощений изобретения разъяснены более подробно ниже и иллюстрируются чертежами, на которых:
фиг.1 представляет схему складского помещения, в котором может использоваться устройство согласно одному воплощению изобретения;
на фиг.2 изображена измерительная полоска и транспортное средство в соответствии с воплощением устройства изобретения, на которое сделана ссылка на фиг.1;
на фиг.3 изображена измерительная полоска с целью объяснения принципа автоматического определения относительного контрольного положения транспортного средства;
на фиг.4 представлен график интенсивности лазерных сигналов, которые отражаются от измерительной полоски, как функция времени для двух различных углов движения; и
на фиг.5 изображена измерительная полоска с целью объяснения принципа определения х, у и α.
ОПИСАНИЕ ПРИМЕРА ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
На фигурах одинаковые символы обозначают одинаковые или функционально идентичные элементы.
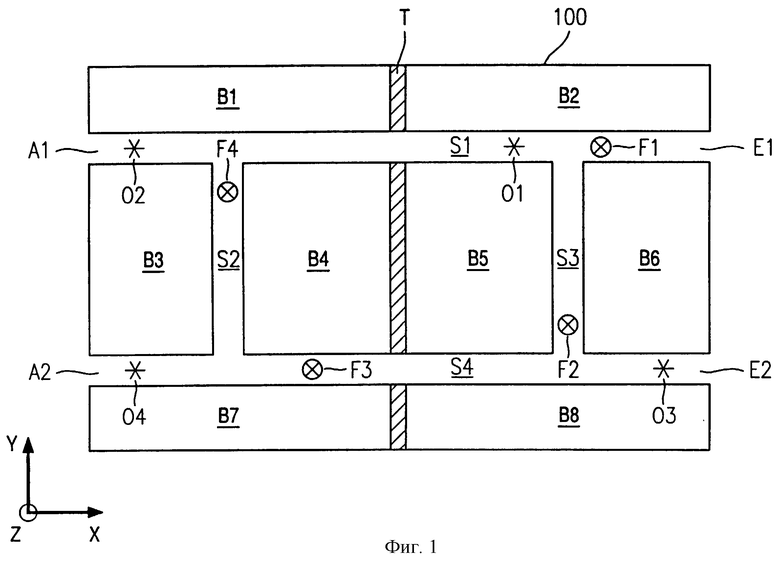
Фиг.1 представляет схему складского помещения, в котором может использоваться устройство согласно одному воплощению изобретения.
На фиг.1 цифрой 100 обозначена определенная территория в виде складского помещения, В1-В8 обозначены элементы складского помещения, Т обозначает разделительную стену. Е1 и Е2 - места погрузки, А1 и А2 - места отправки, S1-S4 маршруты передвижения по складу, F1-F4 транспортные средства в виде вильчатых автопогрузчиков и 01-04 контрольные точки с измерительными полосками.
Автопогрузчики F1-F4 оборудованы графическими видеотерминалами (терминалами), которые не показаны, но являются совместимыми с радиосетями. Они взаимодействуют, например, через последовательный интерфейс с передатчиком положения, который также не показан на чертеже. Для определения точного положения соответствующего автопогрузчика F1-F4 на складе он использует переданные данные датчиков и передает их на терминал автопогрузчика. В дополнение к этим данным о положении терминал указывает водителю автопогрузчика на предназначенные для него задания. Все водители автопогрузчиков также могут использовать подходящие маски и меню для осуществления ручного ввода данных, например записи товаров, которые отсутствуют на складе, корректировки погрузки и ошибок операций подъема, после сообщения о присутствии.
Каждый автопогрузчик F1-F4 имеет систему, включающую датчики давления и тензометрические датчики (система датчиков управления данными), установленные на вилах автопогрузчика, посредством которых можно определять, транспортирует или нет в данный момент соответствующий автопогрузчик товары и количество единиц товара в штабеле.
Все терминалы автопогрузчиков взаимодействуют со стационарным центральным компьютером либо независимо (онлайн режим), либо с временным сдвигом (оффлайн режим). Онлайн режим является обычной ситуацией. Если все терминалы автопогрузчиков работали в оффлайн режиме, то при возвращении их в онлайн режим перемещение товаров, которое имело место в оффлайн режиме, должно быть приведено в соответствие перед возвращением в онлайн режим, с целью обновления баз данных стационарного центрального компьютера.
Обычными функциями в такой системе управления складом являются, например:
- складирование товаров, доставленных от производителя или от поставщика;
- перемещение хранимых товаров;
- поиск конкретных хранимых товаров;
- изменение размещения хранимых товаров;
- проведение инвентаризации всех хранимых товаров.
На фиг.2 изображены измерительная полоска и транспортное средство в соответствии с воплощением устройства изобретения, на которое сделана ссылка на фиг.1.
На фиг.2 измерительные полоски, которые прикреплены в точках 01-04 на потолке складского помещения, как показано на фиг.1, обозначены как MS, неотражающая диагональная область обозначена D, элементы отражающей области обозначены R1 и R2, первое и второе определительные, в частности лазерные, устройства обозначены L1 и L2 соответственно, первый и второй лазерные лучи обозначены ST1 и ST2 соответственно, первое устройство датчиков обозначено 10, микрокомпьютер обозначен 20 и блок приемопередатчика обозначен 30.
Ниже на примере вильчатого автопогрузчика F1 более детально объясняется, как в данном воплощении изобретения непрерывно определяют положение каждого из автопогрузчиков F1-F4 в складском помещении 100.
Первое устройство датчиков 10 на автопогрузчике F1 содержит систему вращательных датчиков на основе гиратора и систему трансляционных датчиков на основе кодирующего устройства.
В этом примере гиратор имеет разрешение 0,1° и является пьезоэлектрическим гироскопом, принцип измерения которого использует маятник Фуко, что означает, что используется сила Кориолиса. В частности, данная сила Кориолиса действует под прямым углом к телу, которое совершает линейные колебания. Эта сила пропорциональна угловой скорости и нужный угол может быть получен соответствующим интегрированием.
В данном примере кодирующее устройство имеет разрешение в сантиметровом диапазоне, обычно 30-40 см на расстоянии 500 м, и является, например, индукционным передатчиком, который сканирует ступицу колеса. При соответствующем выборе он может детектировать как движение вперед, так и движение назад и коррекция может быть произведена рационально для различных длин окружностей колес.
Точность определения положения, которую можно получить таким образом при условии отсутствия пробуксовок, при постоянном диаметре колеса и при разрешении 48 импульсов на разрешение, составляет ± 4,8 см при угловом смещении 17,4 см при прямолинейном движении на участке 100 м.
Таким образом, устройство датчиков 10 позволяет непрерывно определять модуль и угол инкрементных векторов движения, относящихся к движению транспортного средства F1. Таким образом, в принципе, как только определена контрольная точка, текущее местоположение автопогрузчика F1 может быть представлено в виде вектора, который является векторной суммой инкрементных векторов движения, определенных посредством устройства датчиков 10. Однако это приводит к проблеме, заключающейся в том, что точность определения текущего местоположения относительно контрольных точек уменьшается с увеличением количества определенных инкрементных векторов движения, так как каждое вычисление инкрементного вектора является источником ошибки.
Таким образом, в данном воплощении изобретения контрольное положение транспортного средства F1 автоматически устанавливается (еще раз) в определенных точках 01-04 в пределах складского помещения 100 всякий раз, когда транспортное средство F1 проходит соответствующие точки 01-04. Точки 01-04 выбирают таким образом, чтобы вероятность прохождения этих точек транспортным средством была высокой.
Текущее положение транспортного средства F1 на определенной территории 100 определяется путем векторного сложения определенных инкрементных векторов движения с вектором положения текущего контрольного положения, эта операция повторяется автоматически и непрерывно. Это дает возможность избежать проблемы уменьшения точности определения положения, и, таким образом, всегда имеют место высоко точные данные о положении, обычно в сантиметровом диапазоне.
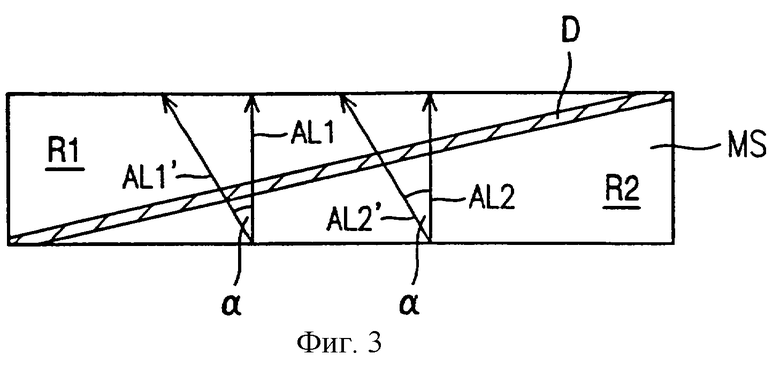
Как показано на фиг.3, соответствующая контрольная метка или контрольная полоска MS является прямоугольной полоской, обычно шириной 10 и длиной 500 см, которая имеет две отражающие области R1 и R2 и неотражающую область D вдоль диагонали прямоугольника.
Измерительные полоски MS устанавливаются в точках 01-04 таким образом, что транспортное средство F1 проходит под ними, при этом полоска сканируется двумя лазерными лучами ST1, ST2, которые находятся на значительном расстоянии d друг от друга. В этом случае координаты контрольного положения определяются путем оценки временного графика интенсивности лазерных лучей ST1, ST2, отраженных от соответствующей измерительной полоски MS.
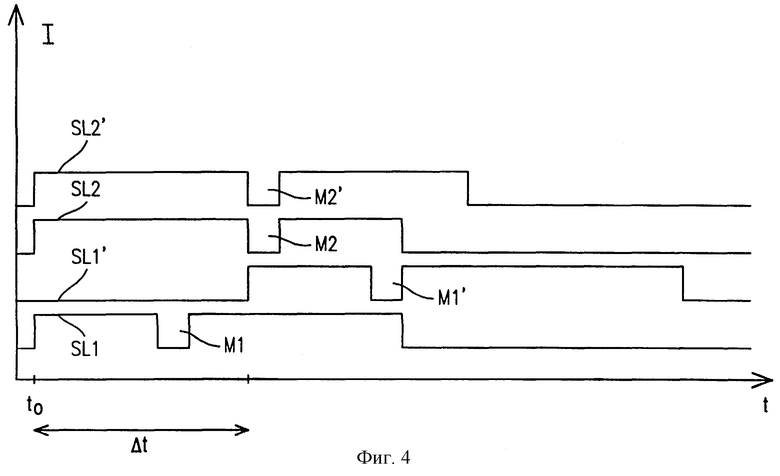
Для пояснения автоматического определения относительного контрольного положения транспортного средства на фиг.3 показана измерительная полоска, а на фиг.4 - график интенсивности лазерных сигналов, отраженных от измерительной полоски, как функция времени для двух различных углов движения.
На фиг.3 и 4 AL, AL2 и AL1′, AL2′ обозначают сканирующие пути лазерных лучей ST1 и ST2 по измерительной полоске MS, α обозначает угол, t обозначает время, Δt -разность времени, SL1, SL2 и SL1′, SL2′ - интенсивность отраженных лазерных лучей ST1 и ST2, M1, M2 и M1′, M2′ - минимум на графике интенсивности отраженных лучей ST1 и ST2, t0 - контрольное время.
Предполагая, что автопогрузчик движется под измерительной полоской MS перпендикулярно продольному направлению последней (α=0°), сканирование лазерньми лучами ST1 и ST2 происходит по линиям, обозначенным AL1, AL2. Интенсивность отраженных лазерных лучей ST1 и ST2 представлена линиями SL1 и SL2 на фиг.4. Как можно видеть, в этом случае не существует фазового сдвига и разности времени Δt между SL1 и SL2.
Предполагая, что автопогрузчик движется под измерительной полоской MS не перпендикулярно продольному направлению последней (т.е. а не равен 0°) сканирование лазерными лучами ST1 и ST2 происходит по линиям, обозначенным AL1′, AL2′. Интенсивности отраженных лазерных лучей ST1 и ST2 представлены линиями SLF и SL2′ на фиг.4. Как можно видеть, в этом случае существует фазовый сдвиг и разность времени Δt между SL1′ и SL2′.
На фиг.5 изображена измерительная полоска MS для объяснения метода определения х, у и α. Координата х контрольной точки определяется из измеренного времени t1, t2, t3, t4, td1 и td2 на графиках SL1 и SL2, точно так же, как и геометрия полоски а, b, с, d в соответствии с уравнениями:
x=a(2t1+2t2-td1-td2)/(t1+t2-t3-t4) (1)
Координата у определяется из уравнения:
y=b(-2t1+td1-td2)/2(-t1+t3) (2)
Угол α определяется из уравнения:
α=arccos[b(-t1+t2-t3+t4)/d(-t1-t2+t3+t4)] (3)
В данном изобретении предлагается способ управления складом, использующий описанный выше способ определения местоположения транспортного средства (F1-F4) на определенной территории (100), в частности в складских помещениях, включающий следующие этапы:
предоставление складского помещения и некоторого количества складских транспортных средств для помещения товаров на склад, и/или их перемещения, и/или их вывоза со склада;
сохранение, по меньшей мере, одного из следующих параметров для помещения товаров на склад, и/или их перемещения, и/или их вывоза со склада: места хранения, времени помещения товаров на склад, и/или их перемещения, и/или их вывоза со склада, типа товара, продолжительности хранения; и
регистрация складских транспортных средств центральным компьютером;
выбор складского транспортного средства для выполнения задания;
вычисление центральным компьютером текущего положения складского транспортного средства;
выполнение выбранным складским транспортным средством погрузки товара;
фиксация погрузки с помощью соответствующего датчика;
оповещение центрального компьютера о факте погрузки и регистрация события;
перемещение и разгрузка товара для хранения в указанном месте хранения выбранным складским транспортным средством;
оповещение центрального компьютера о разгрузке товара в указанном месте;
регистрация центральным компьютером произведенной на складе операции с учетом точных координат помещения товара;
фиксация и запись любой операции, проведенной на складе;
проведение инвентаризации всех хранимых товаров.
В данном изобретении предлагается также система управления складом с использованием устройства определения местоположения транспортного средства на определенной территории, в частности в складских помещениях, содержащая:
складское помещение и некоторое количество складских транспортных средств для помещения товаров на склад, и/или их перемещения, и/или их вывоза со склада;
запоминающее устройство для сохранения, по меньшей мере, одного из следующих параметров для помещения товаров на склад, и/или их перемещения, и/или их вывоза со склада: места хранения, времени помещения товаров на склад, и/или их перемещения, и/или их вывоза со склада, типа товара, продолжительности хранения; и
центральный компьютер для регистрации складских транспортных средств, вычисления их текущего положения, выбора транспортного средства для выполнения операций, получения сигналов о выполненных операциях и регистрации выполненных операций, включая точные координаты помещения товара.
Типичная операция управления складом описана далее со ссылками на простой пример.
Сначала автопогрузчики F1-F4 регистрируются центральным компьютером с помощью их блока приемопередатчика 30. Затем водителю предлагают двигаться к первой измерительной полоске или ввести его текущее положение как первое контрольное положение непосредственно с терминала. Затем центральный компьютер продолжает вычислять текущее положение на основе переданных данных измерений от первого устройства датчиков 10 и передает вычисленное текущее положение соответствующему автопогрузчику F1-F4.
Предположим, что имеет место задание, которое включает погрузку товара в месте погрузки Е1 и размещение его в свободном месте склада на территории склада В7 около места отправки А2.
Для этого центральным компьютером выбирается автопогрузчик F1, так как он является ближайшим к месту погрузки Е1. Этот автопогрузчик F1 движется в направлении места погрузки Е1 и забирает товар на свои вилы, причем это действие фиксируется с помощью соответствующего тензометрического датчика. В то же самое время центральный компьютер оповещается о факте погрузки товара через блок приемопередатчика и регистрирует данное событие. Затем автопогрузчик F1 движется по складскому маршруту S1 в направлении места отправки А1, причем его положение относительно первой контрольной точки определяется постоянно. При прохождении точки 01 лазерные лучи ST1 и ST2 направляются на расположенную там измерительную полоску MS и центральный компьютер в соответствии с способом, описанным выше, определяет новую контрольную точку. После этого местоположение автопогрузчика определяется относительно этой новой контрольной точки.
Когда автопогрузчик F1 достигает маршрута S2, он поворачивает налево и движется к маршруту S4, где он поворачивает направо и движется к точке 04. При прохождении автопогрузчиком точки 04 лазерные лучи ST1 и ST2 взаимодействуют с расположенной там измерительной полоской MS и еще раз в соответствии с способом, описанным выше, определяется новая контрольная точка. С этого момента местоположение определяется относительно новой контрольной точки.
Наконец, автопогрузчик F1 достигает места хранения, которое находится около места отправки А2. Товар сгружается для хранения в указанном месте, о чем тут же направляется сигнал центральному компьютеру. Последний регистрирует операцию на складе, включая точные координаты помещения товара.
Таким образом, в принципе, любая операция на складе может быть точно зафиксирована и записана.
Хотя настоящее изобретение описано выше на основе примера одного из предпочтительных воплощений, оно не ограничивается им и может быть модифицировано многими способами.
Хотя в соответствии с примером, приведенным выше, вычисление положения было произведено центральным компьютером на основе переданных от датчиков данных, данное вычисление может также производиться микрокомпьютером, находящимся на транспортном средстве.
Изобретение не ограничивается складскими транспортными средствами, а также может применяться на любых ограниченных территориях.
Более того, определение контрольных точек может происходить не только посредством описанной лазерной системы, но и с использованием любых подходящих неконтактных датчиков, которые сканируют контрольные метки с помощью по меньшей мере двух сигналов, например индукционных передатчиков, световых барьеров и т.д. Более того, в этом случае в целях сканирования могут использоваться больше чем два сигнала.
В дополнение, форма контрольной метки, под которой движется транспортное средство, имеющей две отражающие и одну неотражающую область вдоль диагонали прямоугольника, может быть не только прямоугольной, как было описано выше. Фактически, несколько таких полосок могут быть расположены одна рядом с другой, в целях получения полоски, состоящей из нескольких частей, каждая из которых имеет две отражающие и одну неотражающую область вдоль диагонали прямоугольника. Это является важным преимуществом в случае, когда ширина контрольной метки превосходит определенную величину, так как в этом случае разрешающая способность уменьшается.
В вышеприведенном примере контрольных меток в форме прямоугольных полосок, которые имеют две отражающие и одну неотражающую область вдоль диагонали прямоугольника, для определения координат контрольного положения и угла движения путем оценки временного графика интенсивности отраженных сигналов аналитическое решение является преимущественно возможным.
Однако другая геометрия полосок является также применимой, например, когда для определения координат контрольного положения и угла движения путем оценки временного графика интенсивности отраженных сигналов возможно только численное решение или более сложное аналитическое решение.
ИЗОКОМ Аутомационссистем, 81379 Мюнхен
Способ и устройство для определения местоположения транспортного средства на определенной территории, в частности, на складе, а также система и способ управления складом.


Изобретение относится к способу и устройству для определения местоположения транспортного средства на определенной территории, в частности в складских помещениях. Технический результат заключается в повышении точности и надежности определения местоположения. Способ включает следующие стадии: определение модуля и угла инкрементных векторов движения, относящихся к движению транспортного средства; автоматическое определение соответствующего контрольного положения транспортного средства в предопределенных точках на определенной территории при прохождении транспортным средством соответствующей точки; определение текущего положения транспортного средства на определенной территории путем векторного сложения полученных инкрементных векторов движения с вектором положения текущего контрольного положения. Автоматическое определение реализуется посредством устройства датчиков, установленного на транспортном средстве, которое взаимодействует бесконтактным способом с соответствующей контрольной меткой, которая имеет отражающую и неотражающую области, которые одновременно сканируются с транспортного средства с помощью по меньшей мере двух сигналов. Координаты контрольного положения транспортного средства и, возможно, угол движения определяются путем оценки зависимости интенсивности отраженных сигналов от времени. 4 н. и 8 з.п. ф-лы, 5 ил.
| DE 4039887 А1, 17.06.1992 | |||
| RU 95104300 А1, 27.12.1997 | |||
| АВТОМАТИЗИРОВАННАЯ СТЕЛЛАЖНО-КОНТЕЙНЕРНАЯ СИСТЕМА ХРАНЕНИЯ ЦЕННОСТЕЙ И СТЕЛЛАЖНО-КОНТЕЙНЕРНОЕ УСТРОЙСТВО | 1997 |
|
RU2130416C1 |
| US 4817000 А, 28.03.1989 | |||
| СПОСОБ ВЫЕМКИ МОЩНЫХ НАКЛОННЫХ Н КРУТЫХ УГОЛЬНЫХ ПЛАСТОВ | 0 |
|
SU185816A1 |

