Изобретение относится к манипуляторным машинам и комплексам многоотраслевого назначения и может быть использовано в модульных конструкциях экскаваторов, а также лесных, сельскохозяйственных, землеройных, торфяных, мелиоративных, водных, горных, строительных, дорожно-строительных, подъемно-транспортных и иных машинах и технических комплексах с манипуляторами и рабочими органами на них.
Известна манипуляторная машина по патенту 1808261, содержащая самоходное шасси, раму с поворотной платформой и два манипулятора со стойками и рабочими органами, причем манипуляторы установлены на общей полноповоротной платформе, а стрелы их шарнирно соединены между собой тягами, расположенными в вертикальной плоскости и перекрестно относительно стрел.
Как и во всех манипуляторных машинах манипуляторного типа, в этом техническом решении неявно базовым модулем является полноповоротная платформа. С целью повышения функциональности и устойчивости в работе в аналоге для динамического уравновешивания применены два манипулятора.
Недостатками являются сложность конструкции и функциональная избыточность в поведении, так как каждый манипулятор при работе другого выполняет функцию только контргруза. При этом базовый модуль для экскаваторов и машин на их базе конструктивно не обособлен. В итоге сборочные единицы, расположенные наверху и снизу (через опорно-поворотное устройство) полноповоротной платформы, соединены конструктивно жестко. Поэтому функция уравновешивания может выполняться только контргрузом или же дополнительными материальными носителями в виде синхронно действующего второго манипулятора для динамического уравновешивания.
Известен также базовый модуль машины по патенту 2008232, содержащий площадку для монтажа технологического оборудования, расположенную на верхней поверхности корпуса трансмиссии.
Недостатком является невысокая устойчивость манипуляторной машины, изготовляемой с применением существующей конструкции полноповоротной платформы экскаватора с приводом и кабиной. Паразитной массой, например, у валочно-пакетирующей машины типа ЛП-19 является контргруз массой 3 тонны. При этом полноповоротная платформа в существующих конструкциях полноповоротных одноковшовых гидравлических экскаваторов не делится на отдельные модули. Например, в статье (Мазуркин П.М. Предметно-функциональный анализ экскаватора // Строительные и дорожные машины. 1995. №10. С.10-12) модульное членение экскаватора завершается на девятом уровне базового модуля, содержащего полноповоротную платформу со всем оснащением (двигатель с насосом, кабина, топливный бак, рычаги управления и гидравлическая система, контргруз).
Немодульная конструкция полноповоротной платформы не позволяет функционально расширить область применение манипуляторной машины на другие отрасли, кроме разработки грунта различных категорий. Даже существующая валочно-пакетирующая машина типа ЛП-19 при массе 24,5 тонн в условиях динамического уравновешивания могла бы достичь предельной массы до 20 тонн. При этом контргруз массой 3 тонны не обеспечивает уравновешивание опрокидывающего момента от дополнительного действия массы, поднимаемой на максимальном вылете захватно-срезающего устройства 8 или 10 м. В итоге приходится сильно утяжелять платформу, особенно в месте расположения опоры манипулятора.
Недостатком полноповоротной платформы известных конструкций является также силовое замыкание через нее от основания манипулятора к опорно-поворотному устройству. В итоге опора манипулятора конструктивно непосредственно не связана с плитой опорно-поворотного круга. Это приводит не только к утяжелению полноповоротной платформы, но и к невозможности модульного ее членения. В итоге не обеспечивается динамическое уравновешивание момента сил от функционирования рабочего органа с манипулятором противодействующим моментом от стационарной поворотной платформы даже при использовании контргруза.
Технический результат - повышение динамического уравновешивания универсальной манипуляторной машины и снижение массы полноповоротной ее платформы, а также повышение функциональных возможностей предлагаемого базового модуля, установленного на монтажной площадке через опорно-поворотное устройство, для комплектования машины многоотраслевого назначения функционально разным манипуляторным оборудованием и рабочими органами для разных видов работ.
Этот технический результат достигается тем, что базовый модуль манипуляторной машины, содержащий монтажную площадку, опорно-поворотное устройство и полноповоротную платформу с механизмами и агрегатами гидросистемы и рабочего оборудования на верхнем конце манипулятора, шарнирно закрепленного нижним концом двумя хвостовиками на опоре стрелы, отличающийся тем, что опора стрелы манипулятора установлена на опорно-поворотном устройстве, а полноповоротная платформа выполнена П-образной формы с охватом своей внутренней полостью опоры у стрелы манипулятора.
Она шарнирно подвешена на опоре стрелы манипулятора посредством плоскопараллельного механизма, по крайней мере, два звена которого шарнирно соединены тягами с двумя хвостовиками нижнего конца стрелы манипулятора так, чтобы полноповоротная платформа на звеньях плоскопараллельного механизма качалась асинхронно повороту стрелы в продольной плоскости манипуляторной машины.
Опора стрелы манипулятора установлена на опорно-поворотном устройстве посредством крепежного кольца с болтовыми соединенными, причем крепежное кольцо приварено снизу к нижней плите опоры, на которой сварными соединениями установлены две пары опорных пластин с отверстиями со стаканами для крепления пальцами хвостовиков стрелы и гидроцилиндров ее поворота, а также двух звеньев плоскопараллельного механизма качания полноповоротной платформы.
Полноповоротная платформа выполнена П-образной формы с охватом своей внутренней полостью опоры у стрелы манипулятора и для выравнивания относительно опорно-поворотного устройства снабжена стойками, шарнирно соединенными со звеньями плоскопараллельного механизма.
Плоскопараллельный механизм выполнен, по меньшей мере, с четырьмя звеньями, по крайней мере, два звена из которых шарнирно соединены тягами с двумя хвостовиками стрелы, причем каждая тяга с шарнирами и хвостовик стрелы размещены внутри одной пары опорных пластин, а передние два звена плоскопараллельного механизма установлены снаружи опоры манипулятора на концах удлиненных пальцев, помещаемых в отверстиях со стаканами для монтажа гидроцилиндров поворота стрелы.
Для снижения габаритной высоты машины без манипулятора длины хвостовиков стрелы, тяг и звеньев плоскопараллельного механизма подбираются так, чтобы угол качания звеньев был симметричным относительно вертикали, а длины стоек принимаются для опускания нижней стороны полноповоротной платформы до уровня верхней поверхности монтажной площадки с полным охватом своей П-образной выемкой всего диаметра роликового подшипника опорно-поворотного устройства.
Для удобства визуального осмотра оператором из кабины при максимальном вылете, например, при копании ниже уровня поверхности грунта длины хвостовиков стрелы, тяг и звеньев плоскопараллельного механизма подбираются так, чтобы угол качания звеньев был асимметричным и начинался от вертикали в сторону стрелы манипулятора.
Для удобства визуального осмотра оператором из кабины, например, с крановым манипуляторным оборудованием длины хвостовиков стрелы, тяг и звеньев плоскопараллельного механизма подбираются так, чтобы угол качания звеньев был асимметричным и доходил от начального угла до вертикали в противоположной стороне от стрелы манипулятора.
Для повышения прочности опоры манипулятора каждая пара опорных пластин снабжается ребрами жесткости, при этом привод опорно-поворотного устройства размещается между двумя парами опорных пластин, а в свободных местах между этими парами опорных пластин сварными соединениями устанавливаются поперечные пластины жесткости.
Сущность технического решения заключается в том, что от существующей конструкции полноповоротной платформы отделена опора стрелы манипулятора и преобразована в базовый модуль (в узком и действительном смысле) манипуляторной машины при функциональном ее обособлении в отдельную сборочную единицу (модуль), который может изготовляться на отдельном предприятии, например, внутри концерна.
Сущность технического решения заключается также в том, что силовые потоки от рабочего органа через манипулятор и его опору передаются непосредственно на роликовый подшипник опорно-поворотного устройства и далее через монтажную площадку на движители разной конструкции, в том числе и по прототипу.
Сущность технического решения заключается также и в том, что качающаяся полноповоротная платформа выведена из поля действий рабочих нагрузок и поэтому воспринимает только вес от механизмов и агрегатов гидросистемы и кабины.
Сущность технического решения заключается также и в том, что качание выполняется наипростейшим по конструкции плоскопараллельным механизмом из четырех звеньев, две из которых используют пальцы крепления у двух гидроцилиндров поворота стрелы манипулятора. Подбор длин хвостовиков стрелы, тяг, звеньев и стоек полноповоротной платформы позволяют в каждом конкретном случае, например, у экскаватора или кранового оборудования, определять конкретный режим зрительного осмотра оператором манипуляторной машины.
Положительный эффект достигается тем, что общая масса манипуляторной машины значительно снижается, а динамическая устойчивость в продольной плоскости манипуляторной машины возрастает. Кроме того, расширяется функциональная структура системы машин изготовления и эксплуатации из-за того, что на один и тот же типоразмер базового модуля в виде предлагаемой опоры стрелы манипулятора можно навешивать разные конструкции полноповоротных платформ с разными кабинами, приводами (ДВС+гидронасос) и гидросистемами (гидромеханические или электрогидромеханические). При этом возрастают также подмножества функционально разных манипуляторов с семействами рабочих органов и разных движителей (гусеничных, колесных, шагающих).
Новизна технического решения заключается в том, что полноповоротная платформа расчленена на функциональные два модуля, из которых опора стрелы преобразована в базовый модель для сборки манипуляторных машин многоотраслевого назначения. Устройство является пионерным. От него можно будет развить множество патентоспособных способов и устройств для формирования системы модульных манипуляторных машин многоотраслевого назначения.
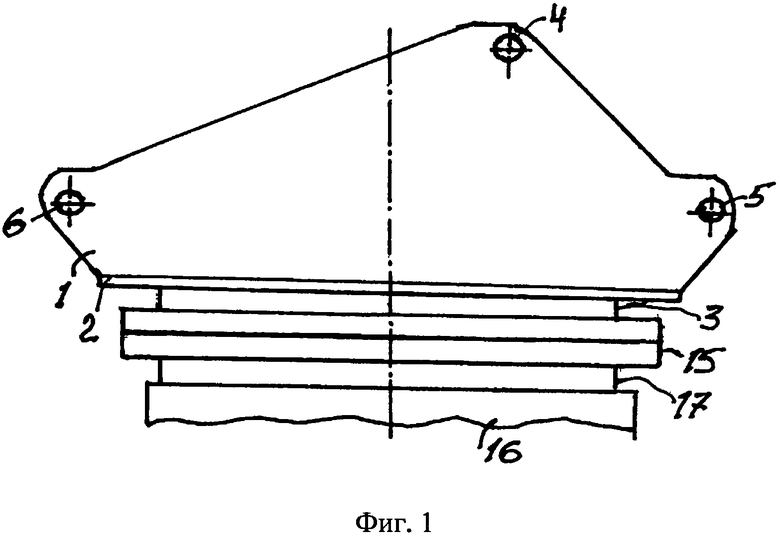
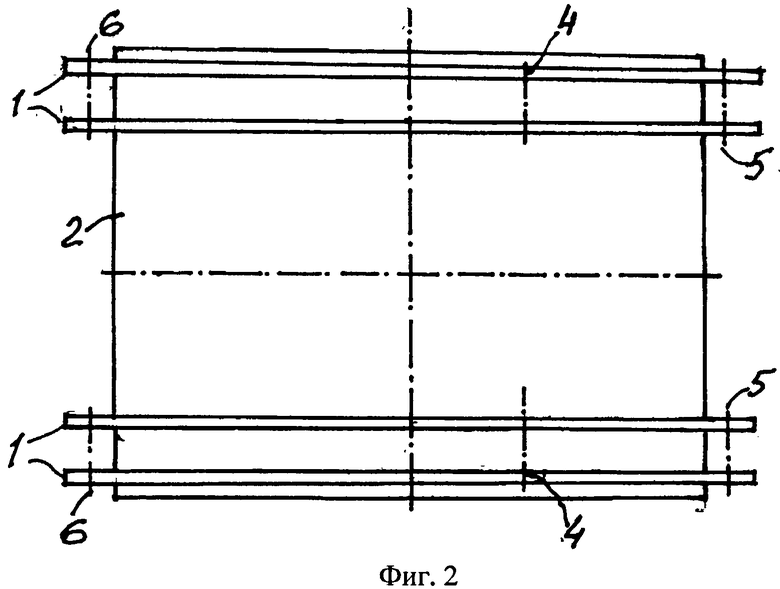
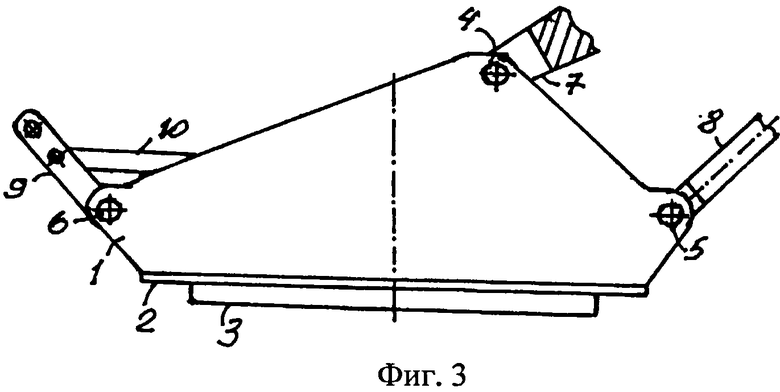
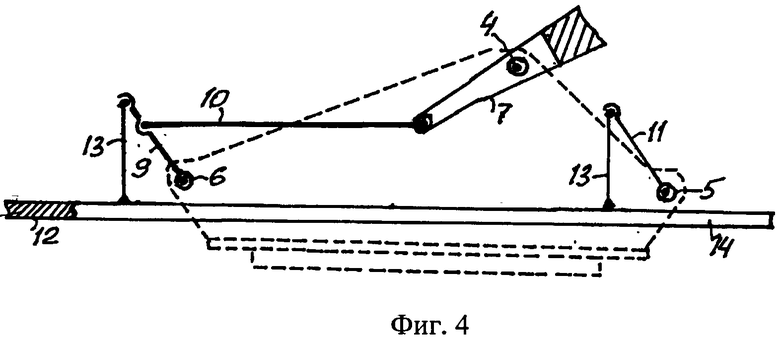
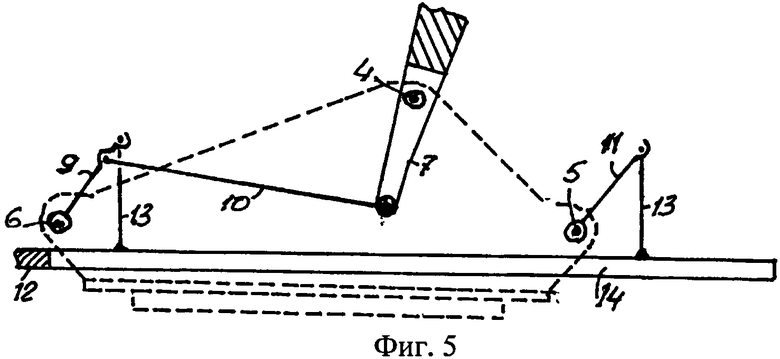
На фиг.1 показан базовый модуль, вид сбоку, установленный на монтажной площадке прототипа болтовыми креплениями через опорно-поворотное устройство; на фиг.2 - вид сверху на базовый модуль манипуляторной машины; на фиг.3 показан базовый модуль с одной парой опорных пластин, внутри которой размещены хвостовик стрелы манипулятора, тяга и одно звено плоскопараллельного механизма, а также спереди гидроцилиндр поворота стрелы; на фиг.4 приведена кинематическая схема асинхронной конструктивной связи между стрелой и полноповоротной качающейся платформой при максимальном вылете рабочего органа (правом граничном угле поворота стрелы манипулятора); на фиг.5 - то же на фиг.4 при минимальном вылете рабочего органа (левом граничном угле поворота стрелы манипулятора).
В общем случае манипуляторная машина многоотраслевого назначения состоит из четырех основных частей: движителя с монтажной площадкой; базового модуля с опорно-поворотным устройством на монтажной площадке; полноповоротной подвижной платформы с механизмами и агрегатами гидросистемы и кабиной оператора; рабочего оборудования со шлейфом манипуляторов и семействами рабочих органов к каждому типу манипулятора.
Базовый модуль манипуляторной машины содержит две пары опорных пластин 1 на нижней плите 2, к которой снизу приварено крепежное кольцо 3. Пары опорных пластин снабжены отверстиями со стаканами 4 для крепления пальцами хвостовиков стрелы. На пластинах имеются также отверстия со стаканами 5 для монтажа гидроцилиндров поворота стрелы манипулятора. На задней части опорных пластин для монтажа двух звеньев плоскопараллельного механизма качания полноповоротной платформы выполнены отверстия со стаканами 6. Для унификации конструкции базового модуля все три отверстия, соответственно, стаканы и пальцы крепления, выполнены одного диаметра.
Внутри каждой пары опорных пластин размещены хвостовик 7 стрелы манипулятора, гидроцилиндр 8 поворота стрелы манипулятора, а в задней части базового модуля в отверстии со стаканом расположено звено 9 плоскопараллельного механизма качания полноповоротной платформы. Между этим звеном и концом хвостовика стрелы расположена тяга 10.
На пальце крепления гидроцилиндра 8 поворота стрелы манипулятора снаружи базового модуля установлено звено 11 плоскопараллельного механизма качания полноповоротной платформы. Все четыре звена имеют одинаковую длину, что позволяет выполнять плоскопараллельное движение полноповоротной платформы 12 через закрепленные на ней (разъемным или неразъемным соединением) стойки 13. Полноповоротная платформа выполнена П-образной формы с внутренней полостью 14, охватывающей с зазором предлагаемый базовый модуль. Эта полость может быть больше диаметра роликового подшипника 15 опорно-поворотного устройства. На монтажной площадке 16 приварено крепежное кольцо 17 для болтового соединения с опорно-поворотным устройством, привод (не показан) которого размещен внутри пар опорных пластин.
Для легкого режима работы полноповоротная платформа может быть закреплена болтами к нижней плите 2 как один узел с базовым модулем.
Базовый модуль манипуляторной машины, например, с рабочим ма-нипуляторным оборудованием для валки и формирования пачки срезанных лесных деревьев, работает в тяжелом режиме следующим образом.
Для снижения габаритной высоты машины без манипулятора длины хвостовиков стрелы, тяг и звеньев плоскопараллельного механизма подбираются так, чтобы угол качания звеньев был симметричным относительно вертикали, а длины стоек принимаются для опускания нижней стороны полноповоротной платформы до уровня верхней поверхности монтажной площадки с полным охватом своей П-образной выемкой всего диаметра роликового подшипника опорно-поворотного устройства. Такая компоновка удобней для оператора валочно-пакетирующей лесной манипуляторной машины из-за того, что место срезания дерева находится всего на высоте 10 см от поверхности почвы.
При выдвижении (фиг.4) захватно-срезающего органа вперед к корневой шейке захватываемого, подтягиваемого и затем срезаемого лесного дерева стрела манипулятора наклоняется вперед, а два хвостовика 7 отклоняются назад. В этом случае две тяги 10 толкают звенья 9 назад и центр тяжести полноповоротной платформы 12 с находящимися на ней механизмами и агрегатами гидросистемы и кабиной оператора также отходит от вертикальной оси манипуляторной машины. В итоге происходит динамическое уравновешивание момента от опрокидывающих вперед сил.
При втягивании (фиг.5) захватно-срезающего органа со срезанным и поднятым деревом к кабине стрела манипулятора наклоняется вверх и назад, а два хвостовика 7 отклоняются вперед. В этом случае две тяги 10 тянут звенья 9 вперед и центр тяжести полноповоротной платформы 12 с находящимися на ней механизмами и агрегатами гидросистемы и кабиной оператора также приходит к вертикальной оси манипуляторной машины, то есть снижается расстояние до центра тяжести всей машины. В итоге происходит динамическое уравновешивание момента от опрокидывающих назад сил, так как при сброске срезанного дерева в пачку машина, если не будет динамического уравновешивания моментов от передних и задних по отношению к общему центру тяжести, может опрокинуться назад.
Предлагаемый базовый модуль обладает высокой унификацией с серийно выпускаемыми отечественными экскаваторами и другими типами машин. При этом повышается динамическая устойчивость манипуляторной машины любого отраслевого назначения при ее работе. Кроме того, уменьшается масса полноповоротной платформы, во многом из-за прямого силового воздействия базового модуля на опорно-поворотной круг.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОГО УРАВНОВЕШИВАНИЯ МАНИПУЛЯТОРНОЙ ЛЕСНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2525268C2 |
| МАШИНА МАНИПУЛЯТОРНАЯ | 2009 |
|
RU2420952C1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| МАШИНА МАНИПУЛЯТОРНАЯ | 2011 |
|
RU2468954C1 |
| Способ монтажа крано-манипуляторной установки на шасси грузового автомобиля | 2021 |
|
RU2754370C1 |
| УНИВЕРСАЛЬНЫЙ ТРУБОУКЛАДОЧНЫЙ МОДУЛЬ | 2016 |
|
RU2684646C2 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАНИПУЛЯТОРНОГО ТИПА | 2011 |
|
RU2473210C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2137701C1 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Лесозаготовительная машина | 1990 |
|
SU1808261A1 |
Изобретение относится к манипуляторным машинам и комплексам многоотраслевого назначения и может быть использовано в модульных конструкциях экскаваторов. Обеспечивает повышение динамического уравновешивания универсальной манипуляторной машины и снижение массы полноповоротной ее платформы, а также повышение функциональных возможностей предлагаемого базового модуля, установленного на монтажной площадке через опорно-поворотное устройство, для комплектования машины многоотраслевого назначения функционально разным манипуляторным оборудованием и рабочими органами для разных видов работ. Опора стрелы манипулятора нижней плитой установлена на опорно-поворотном устройстве, а полноповоротная платформа выполнена П-образной формы с охватом своей внутренней полостью опоры у стрелы манипулятора и шарнирно подвешена на опоре стрелы манипулятора посредством плоскопараллельного механизма, по крайней мере, два звена 9 которого шарнирно соединены тягами с двумя хвостовиками нижнего конца стрелы манипулятора так, чтобы полноповоротная платформа на звеньях плоскопараллельного механизма качалась асинхронно повороту стрелы в продольной плоскости манипуляторной машины. 8 з.п. ф-лы, 5 ил.
1. Базовый модуль манипуляторной машины, содержащий монтажную площадку, опорно-поворотное устройство и полноповоротную платформу с механизмами и агрегатами гидросистемы и рабочего оборудования на верхнем конце манипулятора, шарнирно закрепленного нижним концом двумя хвостовиками на опоре стрелы, отличающийся тем, что опора стрелы манипулятора установлена на опорно-поворотном устройстве, а полноповоротная платформа выполнена П-образной формы с охватом своей внутренней полостью опоры у стрелы манипулятора и шарнирно подвешена на опоре стрелы манипулятора посредством плоскопараллельного механизма, по крайней мере, два звена которого шарнирно соединены тягами с двумя хвостовиками нижнего конца стрелы манипулятора так, чтобы полноповоротная платформа на звеньях плоскопараллельного механизма качалась асинхронно повороту стрелы в продольной плоскости манипуляторной машины.
2. Базовый модуль манипуляторной машины по п.1, отличающийся тем, что опора стрелы манипулятора установлена на опорно-поворотном устройстве посредством крепежного кольца с болтовыми соединениями, причем крепежное кольцо приварено снизу к нижней плите опоры, на которой сварными соединениями установлены две пары опорных пластин с отверстиями со стаканами для крепления пальцами хвостовиков стрелы и гидроцилиндров ее поворота, а также двух звеньев плоскопараллельного механизма качания полноповоротной платформы.
3. Базовый модуль манипуляторной машины по п.1, отличающийся тем, что полноповоротная платформа выполнена П-образной формы с охватом своей внутренней полостью опоры у стрелы манипулятора и для выравнивания относительно опорно-поворотного устройства снабжена стойками, шарнирно соединенными со звеньями плоскопараллельного механизма.
4. Базовый модуль манипуляторной машины по п.1, отличающийся тем, что плоскопараллельный механизм выполнен, по меньшей мере, с четырьмя звеньями, по крайней мере, два звена из которых шарнирно соединены тягами с двумя хвостовиками стрелы, причем каждая тяга с шарнирами и хвостовик стрелы размещены внутри одной пары опорных пластин, а передние два звена плоскопараллельного механизма установлены снаружи опоры манипулятора на концах удлиненных пальцев, помещаемых в отверстиях со стаканами для монтажа гидроцилиндров поворота стрелы.
5. Базовый модуль манипуляторной машины по п.1, отличающийся тем, что для снижения габаритной высоты машины без манипулятора длины хвостовиков стрелы, тяг и звеньев плоскопараллельного механизма подбираются так, чтобы угол качания звеньев был симметричным относительно вертикали, а длины стоек принимаются для опускания нижней стороны полноповоротной платформы до уровня верхней поверхности монтажной площадки с полным охватом своей П-образной выемкой всего диаметра роликового подшипника опорно-поворотного устройства.
6. Базовый модуль манипуляторной машины по п.1, отличающийся тем, что для удобства визуального осмотра оператором из кабины рабочего органа при его действии на максимальном вылете, например, при копании ниже уровня поверхности грунта длины хвостовиков стрелы, тяг и звеньев плоскопараллельного механизма подбираются так, чтобы угол качания звеньев был асимметричным и начинался от вертикали в сторону стрелы манипулятора.
7. Базовый модуль манипуляторной машины по п.1, отличающийся тем, что для удобства визуального осмотра оператором из кабины рабочего органа при его действии на максимальной высоте, например, с крановым манипуляторным оборудованием длины хвостовиков стрелы, тяг и звеньев плоскопараллельного механизма подбираются так, чтобы угол качания звеньев был асимметричным и доходил от начального угла до вертикали в противоположной стороне от стрелы манипулятора.
8. Базовый модуль манипуляторной машины по п.1, отличающийся тем, что для повышения прочности опоры манипулятора каждая пара опорных пластин снабжается ребрами жесткости, при этом привод опорно-поворотного устройства размещается между двумя парами опорных пластин, а в свободных местах между этими парами опорных пластин сварными соединениями устанавливаются поперечные пластины жесткости.
9. Базовый модуль манипуляторной машины по п.1, отличающийся тем, что плоскопараллельный механизм между полноповоротной платформой и базовым модулем устанавливается при выполнении среднего и тяжелого режима работы, а для выполнения легкого режима работы полноповоротная платформа закрепляется болтами сверху к нижней плите, образуя один узел с базовым модулем у манипуляторной машины.
| БАЗОВЫЙ МОДУЛЬ ЛЕСНОЙ МАШИНЫ | 1991 |
|
RU2008232C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1994 |
|
RU2092032C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| ЧЕТЫРЕХЦИЛИНДРОВЫЙ ВЫТЯЖНОЙ ПРИБОР ДЛЯ ПРЯДИЛЬНЫХ МАШИН | 1934 |
|
SU42839A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

