Изобретение относится к морской технике, а конкретно к устройствам стабилизации глубины плавания дрейфующих приборов, используемых в научных, промышленных и военных целях.
Известны радиогидроакустические буи (английские и американские, например AN/SSQ-23, “Джуди” (АРR-58)и др.), в которых корпус с гидрофонами и источниками питания удерживается на глубине кабель-тросом, прикрепленным к плавающей части с антенной и передатчиком (см. Сотников И.М., Брусенцов И.А. “Авиация против подводных лодок”, М., 1970 г., также Клюкин И.И. “Звук и море”, Судостроение, 1974 г.). Основные недостатки буев - малая глубина использования, большие колебания по глубине, особенно при волнении моря.
Известны устройства, малоподверженные влиянию качки, приводящей к появлению помех и искажению результатов измерений, - это FLIP, SPAR и др., корпус которых имеет вид цилиндра диаметром 4,8 м и длиной 108 м и состоит из отсеков - балластного, отсека плавучести и стабилизации, аппаратного. В отсеках размещены насосы и клапаны балластной системы, запасы воздуха высокого давления (см. Простаков А.П. “Гидроакустика и корабль”, Судостроение, 1967 г.).
Несмотря на размещение дополнительных стабилизаторов, при волнении 4 балла скорость вертикального перемещения (по данным источника) составляет 3 м/с, что недопустимо при проведении специальных исследований.
Известна автоматическая плавающая мина, в которой система стабилизации глубины состоит из приемника внешнего давления воды, прибора управления (гидростатический аппарат), включателя электродвигателя с рабочим органом (гребной винт) и аккумуляторной батареи (см. Морозов К. В. “Минно-торпедное оружие”, М., 1974 г.).
Удержание прибора на заданном углублении (±1 м) достигается периодическим подключением аккумуляторной батареи и электродвигателя.
Указанная система принята авторами за прототип изобретения.
Основным недостатком принятого за прототип изобретения устройства является практически невозможная полная компенсация плавучести из-за различной солености и температуры воды и подводных течений, что требует постоянного расхода запасов электроэнергии и сокращает общее время дрейфа мины.
Задачей предлагаемого изобретения является обеспечение удержания прибора на любой заданной глубине с высокой точностью (не более ±0,3-0,5 м от заданного значения глубины) с редкими включениями исполнительного механизма, обеспечивающими минимальный расход энергии, т.е. большую длительность автономного дрейфа.
Указанная цель обеспечивается тем, что в системе стабилизации глубины дрейфующего прибора, содержащей датчик давления, прибор или систему управления, включатель электродвигателя с рабочим органом и аккумуляторную батарею, параллельно с датчиком давления установлен дифференциальный датчик давления, вторая полость которого соединена с забортной средой через компенсационный резервуар и электромагнитный клапан, сигнально связанный с системой управления, а рабочий орган электродвигателя выполнен в виде гидронасоса, перекачивающего забортную воду в балластную камеру, соединенную системой трубопроводов и клапанов с источником воздуха высокого давления и через предохранительный клапан с забортной средой.
Перечисленные признаки обеспечивают высокую точность заданной глубины дрейфа при минимальном расходе энергии.
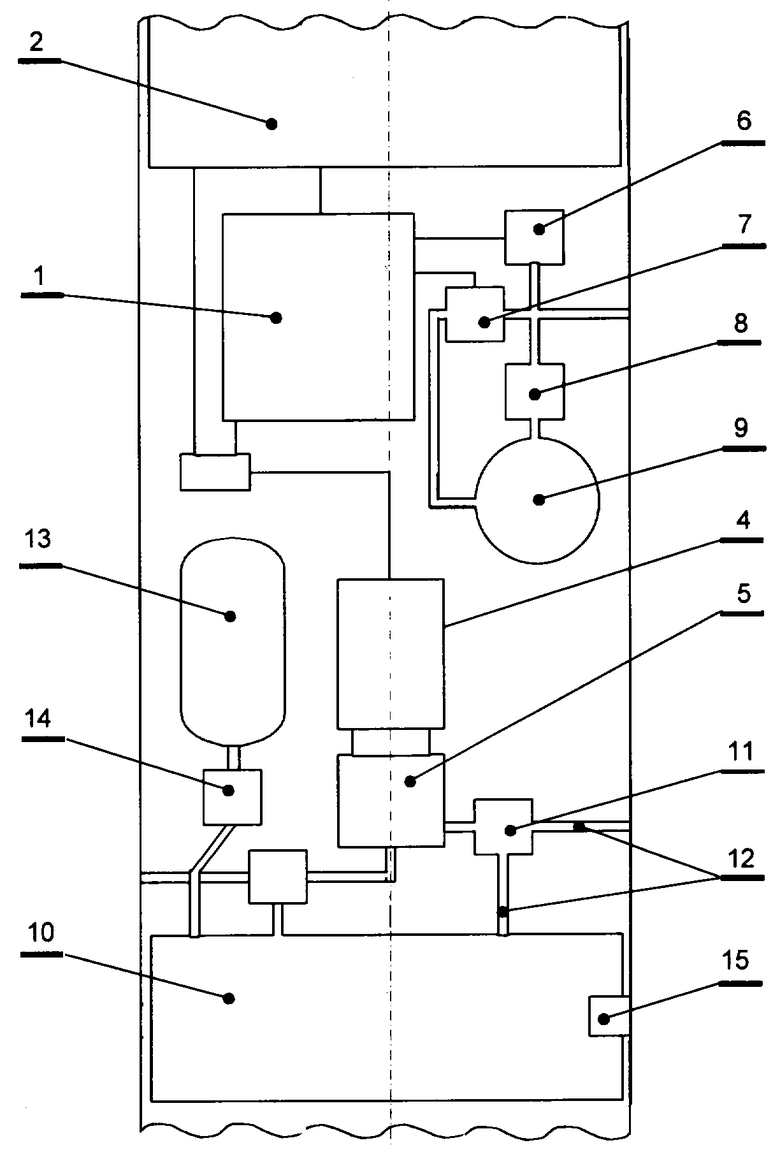
Устройство схематично изображено на чертеже, где: 1 - блок приборов управления, 2 - аккумуляторная батарея, 3 - включатель, 4 - электродвигатель, 5 - гидронасос, 6 - датчик давления, 7 - дифференциальный датчик давления, 8 - электромагнитный клапан, 9 - компенсационный резервуар, 10 - балластная камере, 11 - клапан, 12 - система трубопроводов, 13 - баллон воздуха высокого давления, 14 - воздушный редуктор, 15 - предохранительный клапан.
Устройство функционирует следующим образом:
Изменение глубины погружения дрейфующего прибора измеряется датчиком давления 6, причем даже при погрешности датчика ±0,5% погрешность на больших глубинах будет более нескольких метров. Поэтому одновременно производятся измерения дифференциальным датчиком давления 7, при этом в диапазоне 10 м даже при погрешности датчика ±1,0% погрешность измерения составит несколько сантиметров. После прохождения каждых 10 м глубины приборы управления 1 дают команду на “обнуление” датчика 7, т.е. открывается клапан 8 и через компенсационный резервуар 9, гасящий резкие изменения давления, давление поступает во вторую полость датчика 7, начинающим отсчет глубины снова.
Информация с датчиков поступает в блок управления, где производится вычисление скорости и ускорения движения прибора, и по результатам расчетов вырабатываются команды на включение электродвигателя 4 и насоса 5, который закачивает или откачивает воду из балластной камеры 10, тем самым изменяя плавучесть прибора.
В балластную камеру через редуктор 14 закачивается воздух для обеспечения в камере противодавления, равного забортному давлению.
По предложенному изобретению проведены натурные испытания глубоководного прибора, показавшие работоспособность устройства с обеспечением высокой точности (десятки сантиметров) исполнения глубины дрейфа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ГЛУБИНЫ ГЛУБОКОВОДНОГО ДРЕЙФУЮЩЕГО ПРИБОРА | 2004 |
|
RU2290339C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ГЛУБИНЫ ГЛУБОКОВОДНОГО ДРЕЙФУЮЩЕГО ПРИБОРА | 2005 |
|
RU2288864C2 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| ПЛАВАЮЩАЯ БРОНИРОВАННАЯ ГУСЕНИЧНАЯ МАШИНА | 2006 |
|
RU2326769C2 |
| Буксируемый неавтономный подводный грузовой контейнер | 2021 |
|
RU2762187C1 |
| ПОДВОДНЫЙ АППАРАТ | 1998 |
|
RU2137659C1 |
| ПОДВОДНЫЙ ТАНКЕР | 2009 |
|
RU2387571C1 |
| ГИДРОАКУСТИЧЕСКИЙ ИЗЛУЧАТЕЛЬ ДЛЯ ГЛУБОКОВОДНОГО ДРЕЙФУЮЩЕГО ПРИБОРА | 2003 |
|
RU2257595C2 |
| Устройство для подъема затонувших объектов | 1990 |
|
SU1804408A3 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ И ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2529940C2 |
Изобретение относится к морской технике, в частности к устройствам стабилизации глубины плавания дрейфующих приборов, используемых в научных, промышленных и военных целях. Устройство стабилизации глубины содержит датчик давления, систему управления, включатель электродвигателя, механически соединенного с рабочим органом, и аккумуляторную батарею. Параллельно с датчиком давления установлен дифференциальный датчик давления, вторая полость которого соединена с забортной средой через компенсационный резервуар и электромагнитный клапан, сигнально связанный с системой управления. Рабочий орган выполнен в виде гидронасоса, перекачивающего забортную воду в балластную камеру, соединенную системой трубопроводов и клапанов с источником воздуха высокого давления и через предохранительный клапан - с забортной средой. Достигается удержание прибора на любой заданной глубине с высокой точностью. 1 ил.
Устройство стабилизации глубины глубоководного дрейфующего прибора, содержащее датчик давления, систему управления, включатель электродвигателя, механически соединенного с рабочим органом, и аккумуляторную батарею, отличающееся тем, что параллельно с датчиком давления установлен дифференциальный датчик давления, вторая полость которого соединена с забортной средой через компенсационный резервуар и электромагнитный клапан, сигнально связанный с системой управления, а рабочий орган выполнен в виде гидронасоса, перекачивающего забортную воду в балластную камеру, соединенную системой трубопроводов и клапанов с источником воздуха высокого давления и через предохранительный клапан - с забортной средой.
| К.В.МОРОЗОВ | |||
| Минно-торпедное оружие | |||
| - М., “ДОСААФ”, 1974, с.22 | |||
| DE 1220282 А, 30.06.1966 | |||
| US 3667415 А, 06.06.1972 | |||
| СИСТЕМА ДЛЯ ИЗМЕНЕНИЯ ПЛАВУЧЕСТИ ПОДВОДНОГО АППАРАТА | 1995 |
|
RU2092377C1 |

