Область техники, к которой относится изобретение.
Изобретение относится к области водолазной техники, в частности к подводным транспортным средствам проницаемого («мокрого») типа для транспортировки различных грузов и оборудования.
Уровень техники.
При проведении водолазных подводно-технических работ, океанологических и прикладных исследований на различных акваториях возникают задачи транспортировки различного оборудования и инструментов.
Как правило, транспортировку осуществляют водолазы с помощью разнообразных приспособлений, имеющих внутренние полости для грузов (гермомешки, контейнеры, в том числе с предварительно настраиваемой вручную плавучестью). Водолазы перемещают такие плавучие приспособления вручную рядом с собой.
Общими недостатками таких приспособлений являются:
- невозможность быстрого и точного оперативного регулирования итоговой плавучести приспособления с размещенными в нем грузами;
- затруднена транспортировка грузов, чувствительных к повышенному гидростатическому давлению (не имеющих собственных устойчивых к давлению корпусов);
- отсутствует возможность оперативно загружать в приспособление или выгружать из него различные вспомогательные грузы (вешки, мелкий инструмент, пробы грунта и т.д.).
Наиболее близким техническим решением к заявленному подводному грузовому контейнеру является подводный транспортный контейнер, который имеет передний, центральный и задний отсеки и цилиндрическую форму. При этом центральный отсек имеет, по меньшей мере, одну зону для укладки груза, передний отсек имеет, по меньшей мере, один первый элемент компенсации плавучести, а задний отсек имеет, по меньшей мере, один второй элемент компенсации плавучести, при этом первый элемент компенсации плавучести и второй элемент компенсации плавучести расположены внутри контейнера для подводного транспорта. Первый элемент компенсации плавучести и второй элемент компенсации плавучести осуществляют адаптацию плавучести к окружающим условиям, а первый элемент надводной плавучести и второй элемент надводной плавучести могут переключаться между компактным состоянием внутри подводного транспортного контейнера и состоянием создания плавучести. Кроме того он имеет устройство для хранения газа и газораспределительную систему (WO 2018219774, 06.12.2018). Согласно описанию, регулирование плавучести достигается за счет увеличения подачей газа объема элементов компенсации, омываемых окружающей контейнер водой, а значит испытывающих различную при разном объеме подъемную выталкивающую силу. Недостаток подобных систем состоит в том, что при всплытии контейнера внешнее давление воды уменьшается, и объем надувных элементов компенсации растет, что приводит к росту подъемной выталкивающей силы, в результате чего контейнер стремится всплыть еще сильнее, хотя это и не требуется. Поэтому для исключения этого и обеспечения постоянного объема элементов плавучести приходится стравливать из них лишний газ, что усложняет управление плавучестью, приводит к повышенному расходу газа.
Другим недостатком аналога является то, что отсеки для перевозки грузов в контейнере выполнены либо негерметичными (окружающая вода свободно омывает грузы), либо герметизируются при загрузке на воздухе. В случае негерметичного отсека, если происходит погружение (а значит увеличение давления воды) и груз имеет уменьшающиеся в объеме при увеличении давления элементы, это приводит к тому, что плавучесть груза уменьшается, в этой связи требуется ее дополнительно увеличивать элементами компенсации плавучести, что усложняет управление плавучестью, приводит к повышенному расходу газа. В случае герметичного, закрытого на воздухе отсека, он, кроме полезного груза содержит большое количество оставшегося там атмосферного воздуха, что придает отсеку излишнюю дополнительную плавучесть, которую необходимо компенсировать на время транспортирования груза каким-либо дополнительным временным балластом, что создает дополнительные эксплуатационные трудности.
Сущность изобретения.
Технический результат заявленного изобретения заключается в расширении арсенала технических средств, предназначенных для безопасной транспортировки различных грузов и оборудования, не выдерживающих повышенного гидростатического давления или же плавучесть которых уменьшается с повышением внешнего давления. Кроме того, повышается маневренность и скорость транспортировки, удобство погружения с грузами, остановка на требуемой глубине с минимальным расходом сжатого воздуха.
Технический результат достигается тем, что создан буксируемый неавтономный подводный грузовой контейнер (БНПГК), содержащий корпус цилиндрической формы, в полости которого размещены носовой, грузовой и кормовой отсеки и система управления плавучестью, при этом корпус дополнительно содержит поворотную петлю, замок, хвостовую систему стабилизации при движении, буксирное и якорное устройство, системы креплений для переноски, для погрузки-разгрузки и транспортировки, а также систему швартовки и светоотражающие элементы, причем все отсеки корпуса, кроме грузового отсека, сообщаются с забортным пространством и выполнены так, что в случае погружения БНПГК в воду она свободно проникает внутрь этих отсеков, а система управления плавучестью установлена в носовом и кормовом отсеках и содержит носовую и кормовую цистерны постоянного объема, баллоны воздуха высокого давления с редуктором, клапаны: вентиляции, воздуха среднего давления, заполнения, а также датчик глубины, аккумуляторную батарею, блок управления и пульт управления, причем блок управления соединен с выходом пульта управления, размещенного на корпусе БНПГК и с выходами датчика глубины и аккумуляторной батареи, а выходы блока управления подключены к входам клапанов вентиляции и клапанов заполнения носовой и кормовой цистерн постоянного объема, а также к входу клапана воздуха среднего давления, который в свою очередь подключен к выходу редуктора, соединенного с баллонами воздуха высокого давления, кроме того, грузовой отсек снабжен герметизирующей крышкой, являющейся задней стенкой носового отсека, системой креплений и клапанами ручного управления заливным и вентиляции, дополнительными технологическими лючками, системой отцепки грузов, выполненными с возможностью защиты внутреннего пространства грузового отсека от воздействия внешнего гидростатического давления при погружении во всем рабочем диапазоне глубин, причем носовой отсек корпуса БНПГК выполнен с возможностью его откидывания на поворотной петле для доступа в грузовой отсек и закрывания на замок для герметизации грузового отсека.
Краткое описание чертежей
Сущность изобретения поясняется чертежами.
На фиг. 1 представлена схема общего вида буксируемого неавтономного грузового контейнера;
На фиг. 2 представлена схема системы управления плавучестью;
На фиг. 3 представлена схема грузового отсека в загерметизированном состоянии (разрез);
На фиг. 4 представлена схема грузового отсека с откинутой герметизирующей крышкой (разрез);
На фиг. 5 представлена схема грузового отсека в разгерметизированном состоянии с открытыми технологическими лючками
На фиг. 6 представлен внешний вид реального действующего образца БНПГК.
БНПГК представляет собой (см. фиг. 1, 6) неавтономный буксируемый подводный контейнер, состоящий из цилиндрического удобообтекаемого несущего композитного корпуса 1, содержащего носовой отсек 2, кормовой отсек 3, грузовой отсек 4, поворотную петлю 5, хвостовую систему стабилизации при движении 6, буксирное устройство 7, якорное устройство 8, систему креплений для переноски БНПГК 9, систему креплений для погрузки-разгрузки и транспортировки БНПГК 10, систему швартовки 11, светоотражающие элементы 12. Все отсеки корпуса, за исключением грузового отсека 4, сообщаются с забортным пространством и выполнены так, что в случае погружения БНПГК в воду она свободно проникает внутрь этих отсеков.
Носовой отсек 2 и кормовой отсек 3 снабжены системой управления плавучестью, которая состоит из носовой цистерны 13 и кормовой цистерны 14, баллонов воздуха высокого давления 15 с редуктором 16, клапанов вентиляции 17, клапанов воздуха среднего давления 18, клапанов заполнения 19, клапанов предохранительных 20, датчика глубины 21, аккумуляторной батареи 22, блока управления 23, панели управления (пульт управления) 24. Причем блок управления 23 (см. фиг. 2) соединен с выходом пульта управления 24, размещенного на корпусе БНПГК и с выходами датчика глубины 21 и аккумуляторной батареи 22, а выходы блока управления 23 подключены к входам клапанов вентиляции 17 и клапанов заполнения 19 носовой и кормовой цистерн постоянного объема (позиции 13, 14), а также к входу клапана воздуха среднего давления 18, который в свою очередь подключен к выходу редуктора 16, соединенного с баллонами воздуха высокого давления 15.
Система управления плавучестью представляет собой электро-пневматическую систему, все элементы которой (позиции 13-24) выполнены в подводном герметичном исполнении и закреплены в различных отсеках корпуса 1. Пневматические линии выполнены соответствующими трубопроводами со штуцерами, электрические линии с помощью гермокабелей с герморазъемами. Клапаны 17-19 являются электрически управляемыми двухпозиционными пневматическими кранами. Клапаны вентиляции 17 предназначены для сброса сжатого воздуха из носовой цистерны 13 и кормовой цистерны 14 в забортное пространство и установлены в их верхней части. Клапаны заполнения 19 предназначены для открытия доступа забортной воде внутрь носовой цистерны 13 и кормовой цистерны 14 и расположены в их нижней части.
Система управления плавучестью управляется водолазом-оператором с помощью пульта управления 24, расположенного на корпусе 1. Текущее гидростатическое давление за бортом БНПГК измеряется с помощью датчика глубины 21 (гидростатического датчика), электрический сигнал от которого поступает на вход блока управления 23. Команды управления поступают на блок управления 23, который выполняет запрограммированный в нем алгоритм управления. Управление плавучестью выполняется блоком управления 23 с помощью подачи управляющего напряжения на электромагниты клапанов 17-19. Электропитание для блока управления 23 и всех прочих потребителей электроэнергии поступает с выхода аккумуляторной батареи 22. Предохранительные клапаны 20 служат для предотвращения аварийного разрушения носовой цистерны 13 и кормовой цистерны 14 чрезмерным давлением сжатого воздуха в случае нештатной работы редуктора 16, сбоя в блоке управления 23, неисправности клапанов 17-19 и прочих нештатных ситуаций.
Грузовой отсек 4 БНПГК содержит (см. фиг. 1, 3, 4) корпус грузового отсека 26, герметизирующую крышку 27, являющуюся задней стенкой носового отсека 2, систему креплений грузов 28, клапан вентиляции ручного управления 29, заливной клапан ручного управления 30. Герметизирующая крышка 27 вместе с носовым отсеком 2 может откидываться на поворотной петле 5 для загрузки/разгрузки грузового отсека 4. В закрытом положении герметизирующая крышка 27 удерживается замком 25. Грузовой отсек 4 образует вмещающую полость и выполнен в прочном герметичном исполнении и обеспечивает при необходимости защиту его внутреннего пространства от воздействия внешнего гидростатического давления при погружении во всем рабочем диапазоне глубин. Клапан вентиляции ручного управления 29 представляет собой воздушный кран ручного управления и расположен в верхней части грузового отсека 4, а заливной клапан ручного управления 30 является подобным ручным краном, но для воды, располагается он в нижней донной части грузового отсека 4. Грузовой отсек 4 содержит также герметически закрывающиеся технологические лючки 31, которые используют для доступа в отсек при различных манипуляциях с грузами на глубине. Система креплений грузов 28 выполнена с возможностью отцепки грузов по какому-либо алгоритму.
Конструктивные элементы 7-10 представляют собой различные кронштейны, проушины, крючья.
Подробное описание осуществления изобретения.
БНПГК функционирует следующим образом (см. фиг. 1, 2, 3, 4, 5).
При погружении БНПГК в воду она свободно проникает внутрь всех отсеков, кроме грузового отсека 4. В начальный момент времени в носовой и кормовой цистернах (позиции 13, 14), имеющих постоянный объем, находится некоторое количество воды и сжатого воздуха избыточным давлением 0-15 атмосфер. Суммарный объем носовой и кормовой цистерн (позиции 13, 14), их собственный вес, давление в них и объем воды определяют выталкивающую силу, действующую на них при полном погружении в воду. Эта сила, вместе с плавучестью всех остальных элементов корпуса 1, омываемых забортной водой, попадающей в корпус 1, определяет итоговую плавучесть БНПГК. Вместе с этим, плавучесть БНПГК меняется в зависимости от наличия, количества и вида грузов в грузовом отсеке 4. Компенсировать плавучесть этих грузов можно за счет управления плавучестью носовой и кормовой цистерн (позиции 13, 14). Плавучесть БНПГК выставляют в нулевую или иную требуемую подачей команды на систему управления плавучестью с ее панели управления (пульта управления) 24. При этом реализуется режим установки нейтральной плавучести БНПГК или следящий автоматический режим выдерживания БНПГК на заданной глубине. Алгоритм управления реализуется блоком управления 23 в соответствии с положением органов управления пульта управления 24.
В начальный момент клапаны 17-19 закрыты. Баллоны воздуха высокого давления 15 накачаны сжатым воздухом избыточным давлением 3-300 атм. Далее воздух поступает в редуктор 16, где его давление понижается и он поступает на клапаны воздуха среднего давления 18. Далее в любой момент времени количество воды в носовой и кормовой цистернах (позиции 13, 14) регулируется алгоритмом блока управления 23 подачей воздуха через клапана воздуха среднего давления 18, сбросом воздуха из носовой и кормовой цистерн (позиции 13, 14) за борт через клапаны вентиляции 17, пассивной заливкой забортной воды через клапаны заполнения 19. Сброс воздуха из носовой и кормовой цистерн (позиции 13, 14) ведет к постепенному расходованию запаса сжатого воздуха в баллонах воздуха высокого давления 15. Этот запас рассчитывается на необходимое количество погружений и зависит от интенсивности управления плавучестью.
Манипуляции с грузами с герметизацией грузового отсека (см. фиг. 3, 4)
Такой режим необходим в случае грузов, неустойчивых к повышенному давлению и грузов, плавучесть которых уменьшается с увеличением окружающего давления. Погрузку и разгрузку грузового отсека 4 выполняют на поверхности или в приповерхностном слое воды. Технологические лючки 31 закрыты герметично. Открывают клапаны ручного управления 29 и 30 для выравнивания давления внутри грузового отсека 4 с забортным давлением. Открывают замок 25 и на поворотной петле 5 вручную откидывают герметизирующую крышку 27. Загружают или выгружают необходимые грузы из/в корпус 26, раскрепляя их системой креплений грузов 28. Затем закрывают герметизирующую крышку 27 и закрывают замок 25. Далее обеспечивают полное погружение БНПГК в воду и вручную открывают клапан вентиляции ручного управления 29 и заливной клапан ручного управления 30. Забортная вода заполняет грузовой отсек 4 с грузами, вытесняя имеющийся воздух через клапан вентиляции ручного управления 29. После чего, клапан вентиляции ручного управления 29 и заливной клапан ручного управления 30 закрывают. Грузовой отсек 4 заполнен водой, грузы находятся в воде с давлением, соответствующим поверхностному слою воды, т.е. практически атмосферному. При этом грузовой отсек 4 имеет стабильную плавучесть, так как он загерметизирован и его объем постоянен.
В этом режиме при погружении БНПГК на глубину забортное давление увеличивается, давление же внутри грузового отсека 4 остается равным поверхностному, поэтому забортное давление дополнительно прижимает уплотнение герметизирующей крышки 27. В этой связи открывание герметизирующей крышки 27 и выгрузка грузов из грузового отсека 4 производится только после открытия клапанов ручного управления 29 и 30.
Манипуляции с грузами без герметизации грузового отсека (см. фиг. 5)
Грузовой отсек 4 можно использовать без герметизации. Это возможно при работе с грузами, устойчивыми к повышенному давлению. В этом случае клапаны ручного управления 29 и 30 не закрывают. Тогда грузы могут быть загружены через герметизирующую крышку 27 или через технологические лючки 31 на поверхности воды или во время выполнения погружений БНПГК в водную толщу, в том числе и на дне. Система креплений грузов 28 может быть настроена с возможностью отцепки грузов по какому-либо алгоритму.
Перемещение с БНПГК
Обращаются со снаряженным грузами БНПГК под водой как с буксируемым аппаратом, имеющим пассивную гидродинамическую стабилизацию своей продольной оси в потоке. Управление режимами работы БНПГК с пульта управления 24 выполняют как на БНПГК, плавающем на поверхности, так и на любом горизонте рабочей глубины. Буксировка осуществляется различными фалами за буксирное устройство 7, при этом БНПГК стабилизируется в потоке хвостовой системой стабилизации при движении 6 (гидродинамическими плоскостями). Носовой отсек прочно фиксируется к корпусу 1 с помощью поворотной петли 5 и замка 25, что позволяет безопасно буксировать БНПГК на скорости до 10 узлов. БНПГК при необходимости может быть заякорен на дне или объекте фалом с помощью якорного устройства 8 и пришвартован к различным стенкам или объектам с помощью системы швартовки 11. БНПГК снабжен светоотражающими элементами 12 для облегчения его визуального поиска на поверхности или под водой вблизи.
Транспортировка БНПГК, его переноска к месту работы выполняется с помощью системы креплений для переноски 9 и системы креплений для погрузки-разгрузки и транспортировки 10.
Таким образом, конструктивные элементы буксируемого неавтономного подводного грузового контейнера обеспечивают безопасную транспортировку различных грузов и оборудования, чувствительных к повышенному гидростатическому давлению и стабильную маневренность БНПГК.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система вывески и дифферентовки подводного грузового контейнера | 2015 |
|
RU2618583C2 |
| Система изменения плавучести и дифферента АНПА с автоматическим управлением | 2019 |
|
RU2724920C1 |
| НАДВОДНО-ПОДВОДНОЕ ТРАНСПОРТНОЕ СУДНО | 1999 |
|
RU2149120C1 |
| АВИАДЕСАНТИРУЕМЫЙ СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2022 |
|
RU2782037C1 |
| Система уравнительно-дифферентная для автономного необитаемого подводного аппарата с автоматическим и дистанционным управлением | 2019 |
|
RU2721638C1 |
| ПОДВОДНЫЙ ТАНКЕР | 2009 |
|
RU2387571C1 |
| ТРАНСПОРТИРОВЩИК ВОДОЛАЗОВ | 2011 |
|
RU2458816C1 |
| ПОДВОДНЫЙ ТАНКЕР | 2010 |
|
RU2452651C2 |
| ПОГРУЖАЮЩИЙСЯ КАТЕР | 2004 |
|
RU2319636C2 |
| ПОДВОДНЫЙ ТАНКЕР | 2008 |
|
RU2380274C1 |
Изобретение относится к области водолазной техники, в частности к подводным транспортным средствам для транспортировки различных грузов и оборудования. Буксируемый неавтономный подводный грузовой контейнер (БНПГК) состоит из корпуса цилиндрической формы, в полости которого размещены носовой, грузовой и кормовой отсеки и система управления плавучестью. Корпус дополнительно содержит поворотную петлю, замок, хвостовую систему стабилизации при движении, буксирное и якорное устройства, системы креплений для переноски, для погрузки-разгрузки и транспортировки, а также систему швартовки и светоотражающие элементы. Все отсеки корпуса, кроме грузового отсека, сообщаются с забортным пространством и выполнены так, что в случае погружения БНПГК в воду она свободно проникает внутрь этих отсеков. Система управления плавучестью установлена в носовом и кормовом отсеках и содержит носовую и кормовую цистерны постоянного объема, баллоны воздуха высокого давления с редуктором, клапаны: вентиляции, воздуха среднего давления, заполнения, а также датчик глубины, аккумуляторную батарею, блок управления и пульт управления. Грузовой отсек снабжен герметизирующей крышкой, являющейся задней стенкой носового отсека, системой креплений и клапанами ручного управления заливным и вентиляции, дополнительными технологическими лючками, системой отцепки грузов, выполненными с возможностью защиты внутреннего пространства грузового отсека от воздействия внешнего гидростатического давления при погружении во всем рабочем диапазоне глубин. Носовой отсек выполнен с возможностью его откидывания на поворотной петле для доступа в грузовой отсек и закрывания его на замок для герметизации. Достигается расширение арсенала технических средств, повышение маневренности и скорости транспортировки, удобство погружения с грузами, остановка на требуемой глубине с минимальным расходом сжатого воздуха. 6 ил.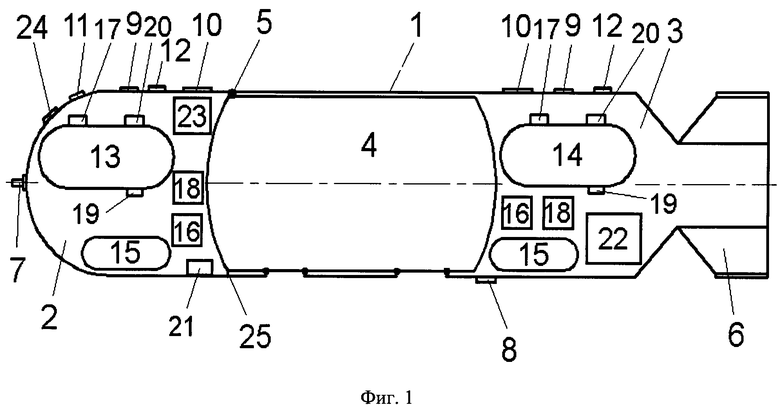
Буксируемый неавтономный подводный грузовой контейнер (БНПГК), содержащий корпус цилиндрической формы, в полости которого размещены носовой, грузовой и кормовой отсеки, система управления плавучестью, отличающийся тем, что корпус дополнительно содержит поворотную петлю, замок, хвостовую систему стабилизации при движении, буксирное и якорное устройства, системы креплений для переноски, для погрузки-разгрузки и транспортировки, а также систему швартовки и светоотражающие элементы, причем все отсеки корпуса, кроме грузового отсека, сообщаются с забортным пространством и выполнены так, что в случае погружения БНПГК в воду она свободно проникает внутрь этих отсеков, а система управления плавучестью установлена в носовом и кормовом отсеках и содержит носовую и кормовую цистерны постоянного объема, баллоны воздуха высокого давления с редуктором, клапаны: вентиляции, воздуха среднего давления, заполнения, а также датчик глубины, аккумуляторную батарею, блок управления и пульт управления, причем блок управления соединен с выходом пульта управления, размещенного на корпусе БНПГК, и с выходами датчика глубины и аккумуляторной батареи, а выходы блока управления подключены к входам клапанов вентиляции и клапанов заполнения носовой и кормовой цистерн постоянного объема, а также к входу клапана воздуха среднего давления, который в свою очередь подключен к выходу редуктора, соединенного с баллонами воздуха высокого давления, грузовой отсек снабжен герметизирующей крышкой, являющейся задней стенкой носового отсека, системой креплений и клапанами ручного управления заливным и вентиляции, технологическими лючками, системой отцепки грузов, выполненными с возможностью защиты внутреннего пространства грузового отсека от воздействия внешнего гидростатического давления при погружении во всем рабочем диапазоне глубин, причем носовой отсек корпуса БНПГК выполнен с возможностью его откидывания на поворотной петле для доступа в грузовой отсек и закрывания его на замок для герметизации.
| WO 2018219774 A1, 06.12.2018 | |||
| Подводный планер-глайдер | 2017 |
|
RU2669244C1 |
| ПОДВОДНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2462388C2 |

