Область техники
Настоящее изобретение относится к датчикам и связанным с ними способам, более конкретно к способам и устройствам для измерения массового расхода.
Описание известного уровня техники
Во многих применениях датчиков используется обнаружение механической вибрации или другого движения. Примеры датчиков, в которых используется обнаружение движения, включают в себя кориолисовы массовые расходомеры и денсиметры с вибрирующей трубкой. Эти устройства обычно содержат трубку или другую емкость, которая периодически приводится в движение, например вибрирует. Такие свойства, как массовый расход, плотность и т.п., связанные с материалом, заключенным в трубке или емкости, можно определять посредством обработки сигналов от измерительных преобразователей движения, расположенных на защищенной структуре, так как вибрационные моды вибрирующей системы, заполненной материалом, обычно подвергаются воздействию совокупности характеристик массы, жесткости и демпфирования конструкции вмещающей трубки или емкости и содержащегося в ней материала.
Типичный кориолисов массовый расходомер содержит одну или несколько трубок, подсоединенных вдоль линии трубопровода или другой транспортировочной системы и передающих материал, например текучие среды, суспензии и т.п., в системе. Каждую трубку можно рассматривать как имеющую ряд собственных вибрационных мод, включая, например, простые изгибающие, крутильные, радиальные и связанные моды. В применении типичного кориолисова массового расходомера трубка возбуждается в резонансе с одной из ее собственных вибрационных мод, когда материал течет через трубку, и движение трубки измеряется в точках, расположенных вдоль трубки. Возбуждение типично обеспечивается каким-либо исполнительным механизмом, например электрохимическим устройством, таким как возбудитель типа звуковой катушки, который периодически возбуждает трубку. Примеры кориолисовых массовых расходомеров описаны в патентах США №№4109524 (Smith), 4491025 (Smith et al.) и Re.31450 (Smith).
К сожалению, на точность традиционных кориолисовых массовых расходомеров могут отрицательно влиять нелинейности и асимметрии в конструкции трубки, движение, возникающее под действием внешних сил, например сил, формируемых насосами и компрессорами, подсоединенными к расходомеру, и движение, вызванное силами давления, создаваемыми материалом, протекающим через трубку расходомера. Воздействия этих сил обычно снижаются за счет использования конструкций расходомера, сбалансированных для уменьшения эффектов, относящихся к внешней вибрации, и использования фильтров частотной области, например полосовых фильтров, выполненных с возможностью отфильтровывания тех составляющих сигналов движения, которые находятся за пределами частоты возбуждения. Однако методы механической фильтрации часто ограничены механическими факторами, например ограничениями материала, монтажа, массы, размера и т.п., а частотная фильтрация может быть неэффективной при удалении нежелательных вибрационных составляющих, близких к частоте возбуждения.
Указанные недостатки устраняются заявленным устройством вибрирующей трубки с модоселективным фильтром и способом его функционирования.
Краткое изложение сущности изобретения
Согласно предпочтительному варианту осуществления изобретения массовый расход материала в трубке оценивается посредством модоселективной фильтрации множества сигналов на перемещение (сигналов движения), характеризующих движение трубки, для выработки множества сигналов движения, отфильтрованных методом модоселективной фильтрации, так что сигналы движения, отфильтрованные методом модоселективной фильтрации, преимущественно представляют движение, связанное с вибрационной модой трубки. Из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, формируют множество фазовых оценок. Из множества фазовых оценок вырабатывают оценку массового расхода. Множество фазовых оценок можно оценить, используя опорную фазу, полученную из одного из множества сигналов движения, отфильтрованных методом модоселективной фильтрации.
В некоторых вариантах осуществления изобретения к множеству сигналов движения применяется модальное преобразование для формирования множества модальных ответных сигналов в модальной области координат. Модоселективное преобразование применяется к множеству модальных ответных сигналов для формирования множества сигналов движения, отфильтрованных методом модоселективной фильтрации. В других вариантах осуществления изобретения оценивается частота сигнала движения, отфильтрованного методом модоселективной фильтрации из множества сигналов движения, отфильтрованных методом модоселективной фильтрации. На основе этой оцененной частоты формируются квадратурные первый и второй опорные сигналы. Множество фазовых оценок вырабатывается из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и первого и второго опорных сигналов.
В других вариантах осуществления изобретения формируется множество оценок разности времени из множества фазовых оценок, и из множества оценок разности времени формируется оценка массового расхода. Множество оценок разности времени можно получить из множества фазовых оценок посредством деления множества фазовых оценок на частоту моды для формирования множества значений разности времени. Множество опорных разностей времени нулевого расхода можно применить к множеству значений разности времени для формирования множества оценок разности времени. Частота моды может оцениваться на основании модального сигнала движения, сформированного из множества сигналов движения. По оцененной частоте моды можно также оценить плотность материала в трубке.
Согласно другим аспектам изобретения массовый расход материала в трубке можно определить посредством обработки множества сигналов движения, характеризующих движение трубки, с использованием одного из множества сигналов движения в качестве опорного времени для формирования подобного множества оценок разности, и оценки параметра наклона масштабной функции, которая связывает друг с другом множество оценок разности и подобное множество опорных разностей, представляющих движение трубки при известном массовом расходе. Оценку массового расхода можно определить из оцененного параметра наклона и известного массового расхода.
В некоторых вариантах осуществления изобретения формируется расширенная матрица, включающая множество опорных разностей. Множество оценок разности умножают на псевдоинверсию расширенной матрицы для определения параметра наклона. В других вариантах множество оценок разности умножают на псевдоинверсию опорных разностей времени для определения параметра наклона. Масштабный параметр можно также оценить итерационным методом для определения параметра наклона, используя, например, метод наименьшей среднеквадратической (НМСК) оценки.
Согласно другим аспектам изобретения устройство содержит трубку, вмещающую материал. Множество измерительных преобразователей движения функционально связано с трубкой и вырабатывает множество сигналов движения, представляющих движение трубки. Схема обработки сигнала принимает множество сигналов движения и осуществляет фильтрацию мод сигналов движения для выработки множества сигналов движения, отфильтрованных методом модоселективной фильтрации, так что сигналы движения, отфильтрованные методом модоселективной фильтрации, преимущественно представляют движение, связанное с вибрационной модой трубки. Схема обработки сигнала вырабатывает множество фазовых оценок из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и формирует оценку массового расхода из множества фазовых оценок. Схема обработки сигнала может формировать множество фазовых оценок, используя опорную фазу, полученную из одного из множества сигналов движения, отфильтрованных методом модоселективной фильтрации.
Согласно другим вариантам осуществления изобретения устройство содержит трубку и множество измерительных преобразователей движения, функционально связанных с трубкой, которые вырабатывают множество сигналов движения, характеризующих движение трубки. Схема обработки сигнала принимает множество сигналов движения и обрабатывает их, используя один из множества сигналов движения в качестве опорного времени для выработки аналогичного множества оценок разности. Схема обработки сигнала оценивает параметр наклона масштабной функции, которая связывает между собой множество оценок разности и аналогичное множество опорных разностей, представляющих движение трубки при известном массовом расходе, и формирует оценку массового расхода из оцененного параметра наклона и известного массового расхода. Схема обработки сигнала может формировать расширенную матрицу, включающую множество опорных разностей, и может умножать множество оценок разности на псевдоинверсию расширенной матрицы для определения параметра наклона. Альтернативно, схема обработки сигнала может умножать множество оценок разности на псевдоинверсию опорных разностей времени для определения параметра наклона. Схема обработки сигнала может также оценивать масштабную функцию итеративно.
Можно заметить, что аспектом изобретения является устройство, содержащее устройство, функционально связанное с какой-то конструкцией и вырабатывающее множество сигналов движения, представляющих движение данной конструкции; устройство, фильтрующее множество сигналов движения, характеризующих движение данной конструкции, и устройство, формирующее множество сигналов движения, отфильтрованных методом модоселективной фильтрации, которые предпочтительно представляют движение, связанное с вибрационной модой конструкции.
Предпочтительно, устройство дополнительно содержит устройство для формирования множества фазовых оценок из множества сигналов движения, отфильтрованных методом модоселективной фильтрации.
Предпочтительно, устройство дополнительно содержит устройство для формирования оценки массового расхода из множества фазовых оценок.
Предпочтительно, устройство дополнительно содержит устройство для формирования множества оценок разности времени между множеством сигналов движения, отфильтрованных методом модоселективной фильтрации, и устройство для выработки меры корреляции из множества оценок разности времени, и устройство для определения состояния системы массового расходомера из сформированной меры корреляции.
Предпочтительно, устройство для формирования множества фазовых оценок содержит устройство для формирования множества фазовых оценок с использованием опорной фазы, полученной из одного из множества сигналов движения, отфильтрованных методом модоселективной фильтрации.
Предпочтительно, модоселективный фильтр содержит устройство для применения модального преобразования к множеству сигналов движения для формирования множества модальных ответных сигналов в модальной области координат, и устройство для применения модоселективного преобразования к множеству модальных ответных сигналов для формирования множества сигналов движения, отфильтрованных методом модоселективной фильтрации.
Предпочтительно, устройство для формирования множества фазовых оценок содержит устройство для оценки частоты сигнала движения, отфильтрованного методом модоселективной фильтрации, из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, устройство для формирования квадратурных первого и второго опорных сигналов на основании оцененной частоты, и устройство для формирования множества фазовых оценок из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и первого и второго опорных сигналов.
Предпочтительно, устройство для формирования множества фазовых оценок из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и первого и второго опорных сигналов содержит устройство для умножения сигнала движения, отфильтрованного методом модоселективной фильтрации, на соответствующие первый и второй опорные сигналы для формирования соответствующих вещественного и мнимого составляющих сигналов сигнала движения, отфильтрованного методом модоселективной фильтрации, и устройство для оценки арктангенса частного вещественного и мнимого составляющих сигналов сигнала движения, отфильтрованного методом модоселективной фильтрации, для формирования фазовой оценки.
Предпочтительно, устройство дополнительно содержит устройство для формирования множества оценок разности времени из множества фазовых оценок.
Предпочтительно, устройство дополнительно содержит устройство для формирования оценки массового расхода из множества оценок разности времени.
Предпочтительно, устройство для формирования множества оценок разности времени из множества фазовых оценок содержит устройство для деления множества фазовых оценок на частоту моды для формирования множества значений разности времени.
Предпочтительно, устройство для формирования множества оценок разности времени из множества фазовых оценок дополнительно содержит устройство для применения множества опорных разностей времени нулевого расхода к множеству значений разности времени для формирования множества оценок разности времени.
Предпочтительно, устройство для модоселективной фильтрации содержит устройство для применения модального преобразования к множеству сигналов движения для формирования модального сигнала движения в модальной области координат и устройство для оценки частоты моды из модального сигнала движения.
Предпочтительно, устройство дополнительно содержит устройство для оценки плотности материала в трубке из оцененной частоты моды.
Предпочтительно, устройство дополнительно содержит устройство для оценки параметра масштабной функции, которая связывает между собой множество оценок разности времени и множество опорных разностей времени, характеризующих перемещение конструкции при известном возмущении.
Предпочтительно, возмущением в устройстве является массовый расход.
Предпочтительно, устройство для оценки параметра содержит устройство для формирования расширенной матрицы, включающей множество опорных разностей времени, и устройство для умножения множества оценок разности времени на псевдоинверсию расширенной матрицы для определения параметра.
Предпочтительно, в устройстве для оценки параметра осуществляют итеративную оценку масштабной функции.
Предпочтительно, в устройстве для итеративной оценки параметра применяют процедуру наименьшей среднеквадратичной оценки (НМСК).
Предпочтительно, перед устройством для оценки параметра предусмотрено устройство для обработки множества сигналов движения, характеризующих перемещение конструкции при известном возмущении, для формирования множества опорных разностей времени.
Предпочтительно, параметром масштабной функции является параметр наклона, при этом дополнительно предусмотрено устройство для формирования оценки массового расхода из параметра наклона и известного массового расхода.
Предпочтительно, устройство для оценки параметра наклона содержит устройство для умножения множества оценок разности времени на псевдоинверсию множества опорных разностей времени для определения параметра наклона.
Предпочтительно, параметром масштабной функции является параметр, характеризующий отрезок, отсекаемый на координатной оси (параметр отрезка,) при этом дополнительно предусмотрено устройство для определения состояния системы из параметра отрезка.
Предпочтительно, перед модоселективным фильтром предусмотрено устройство для приема множества сигналов движения из множества измерительных преобразователей движения, функционально связанных с конструкцией, при этом устройство для определения состояния системы содержит устройство для определения состояния измерительного преобразователя движения по параметру отрезка.
Предпочтительно, устройство дополнительно содержит устройство для оценки плотности материала в конструкции по оцененной частоте моды.
Предпочтительно, устройство дополнительно содержит устройство для оценки частоты первого сигнала движения, отфильтрованного методом модоселективной фильтрации, из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и устройство для формирования оценки разности из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и оцененной частоты.
Предпочтительно, устройство для формирования оценки разности содержит устройство для формирования квадратурных первого и второго опорных сигналов на основании оцененной частоты и устройство для формирования оценки разности из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и первого и второго опорных сигналов.
Предпочтительно, устройство для формирования оценки разности из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и первого и второго опорных сигналов содержит устройство для формирования фазовой оценки из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и первого и второго опорных сигналов, и устройство для формирования оценки разности времени из фазовой оценки.
Предпочтительно, устройство для формирования фазовой оценки из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и первого и второго опорных сигналов содержит устройство для умножения второго сигнала движения, отфильтрованного методом модоселективной фильтрации, на первый и второй опорные сигналы для выработки соответствующих вещественного и мнимого составляющих сигналов второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и устройство для оценки арктангенса частного вещественного и мнимого составляющих сигналов второго сигнала движения, отфильтрованного методом модоселективной фильтрации, для формирования фазовой оценки.
Следует отметить, что дополнительным аспектом изобретения является способ функционирования устройства, заключающийся в том, что оценивают перемещение конструкции, осуществляют модоселективную фильтрацию множества сигналов движения, характеризующих перемещение конструкции, и формируют множество сигналов движения, отфильтрованных методом модоселективной фильтрации, характеризующих перемещение, связанное с модой вибрации конструкции.
Предпочтительно, в способе дополнительно формируют множество фазовых оценок из множества сигналов движения, отфильтрованных методом модоселективной фильтрации.
Предпочтительно, в способе дополнительно формируют оценку массового расхода из множества фазовых оценок.
Предпочтительно, в способе дополнительно формируют множество оценок разности времени из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и формируют меру корреляции из множества оценок разности времени, и определяют состояние системы массового расходомера из полученной меры корреляции.
Предпочтительно, при формировании множества фазовых оценок формируют множество фазовых оценок с использованием опорной фазы, полученной из одного из множества сигналов движения, отфильтрованных методом модоселективной фильтрации.
Предпочтительно, при применении модоселективного фильтра применяют модальное преобразование к множеству сигналов движения для формирования множества модальных ответных сигналов в модальной области координат и применяют модоселективное преобразование к множеству модальных ответных сигналов для формирования множества сигналов движения, отфильтрованных методом модоселективной фильтрации.
Предпочтительно, при формировании множества фазовых оценок оценивают частоту сигнала движения, отфильтрованного методом модоселективной фильтрации, из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, формируют квадратурные первый и второй опорные сигналы на основании оцененной частоты и формируют множество фазовых оценок из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и первого и второго опорных сигналов.
Предпочтительно, при формировании множества фазовых оценок из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и первого и второго опорных сигналов умножают сигнал движения, отфильтрованный методом модоселективной фильтрации, на соответствующие первый и второй опорные сигналы для формирования соответствующих вещественного и мнимого составляющих сигналов сигнала движения, отфильтрованного методом модоселективной фильтрации, и оценивают арктангенс частного вещественного и мнимого составляющих сигналов сигнала движения, отфильтрованного методом модоселективной фильтрации, для формирования фазовой оценки.
Предпочтительно, в способе дополнительно формируют множество оценок разности времени из множества фазовых оценок.
Предпочтительно, в способе дополнительно формируют оценку массового расхода из множества оценок разности времени.
Предпочтительно, при формировании множества оценок разности времени из множества фазовых оценок делят множество фазовых оценок на частоту моды для получения множества значений разности времени.
Предпочтительно, при формировании множества оценок разности времени из множества фазовых оценок дополнительно применяют множество опорных разностей времени нулевого расхода к множеству значений разности времени для получения множества оценок разности времени.
Предпочтительно, при формировании множества оценок разности времени из множества фазовых оценок корректируют множество фазовых оценок с использованием множества значений фазы нулевого расхода.
Предпочтительно, при модоселективной фильтрации применяют модальное преобразование к множеству сигналов движения для получения модального сигнала движения в модальной области координат и дополнительно оценивают частоту моды из модального сигнала движения.
Предпочтительно, дополнительно оценивают плотность материала в трубе по оцененной частоте моды.
Предпочтительно, дополнительно оценивают параметр масштабной функции, связывающей между собой множество оценок разности времени и множество опорных разностей времени, представляющих движение конструкции при известном возмущении.
Предпочтительно, возмущением в способе является массовый расход.
Предпочтительно, при оценке параметра формируют расширенную матрицу, включающую множество опорных разностей времени, и умножают множество оценок разности времени на псевдоинверсию расширенной матрицы для определения параметра.
Предпочтительно, при оценке параметра итеративно оценивают масштабную функцию.
Предпочтительно, при итеративной оценке применяют метод наименьшей среднеквадратичной оценки (НМСК).
Предпочтительно, перед оценкой параметра обрабатывают множество сигналов движения, характеризующих перемещение конструкции при известном возмущении, для формирования множества опорных разностей времени.
Предпочтительно, параметром масштабной функции является параметр наклона, при этом дополнительно формируют оценку массового расхода из параметра наклона и известного массового расхода.
Предпочтительно, при оценке параметра наклона умножают множество оценок разности времени на псевдоинверсию множества опорных разностей времени для определения параметра наклона.
Предпочтительно, параметром масштабной функции является параметр отрезка, при этом дополнительно определяют состояние системы по параметру отрезка.
Предпочтительно, перед модоселективной фильтрацией принимают множество сигналов движения из множества измерительных преобразователей движения, функционально связанных с конструкцией, и при определении состояния системы определяют состояние измерительных преобразователей движения по параметру отрезка.
Предпочтительно, дополнительно оценивают плотность материала в конструкции по оцененной частоте моды.
Предпочтительно, оценивают частоту первого сигнала движения, отфильтрованного методом модоселективной фильтрации, из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и формируют оценку разности из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, и оцененной частоты.
Предпочтительно, при формировании оценки разности формируют квадратурные первый и второй опорные сигналы на основании оцененной частоты и формируют оценку разности из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и первого и второго опорных сигналов.
Предпочтительно, при формировании оценки разности из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и первого и второго опорных сигналов формируют фазовую оценку из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и первого и второго опорных сигналов и формируют оценку разности времени из фазовой оценки.
Предпочтительно, при формировании фазовой оценки из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и первого и второго опорных сигналов умножают второй сигнал движения, отфильтрованный методом модоселективной фильтрации, на первый и второй опорные сигналы для получения соответствующих вещественного и мнимого составляющих сигналов второго сигнала движения, отфильтрованного методом модоселективной фильтрации, и оценивают арктангенс частного вещественного и мнимого составляющих сигналов второго сигнала движения, отфильтрованного методом модоселективной фильтрации, для формирования фазовой оценки.
Глоссарий терминов
Модоселективный фильтр. Модоселективный фильтр функционирует в физической-модальной-физической области, пропуская только требуемые моды в остальную цепь обработки сигнала. Фильтр пропускания мод состоит из модального фильтра, матрицы выбора и матрицы преобразования модальной информации обратно в физическую область (обычно с использованием матрицы формы моды, Ф, или некоторой ее подгруппы).
Матрица селекции мод. Диагональная матрица с единицами на местах, соответствующих требуемым модам.
Матрица формы мод. Модальная матрица, приведенная к требуемым физическим местам; преобразование из модальной области в физическую область.
Мода вибрации. Уникальное свойство конструкции, которое можно использовать для определения, как конструкция отреагирует (осуществит движение) на силу. В математическом выражении это собственный вектор матрицы уравнений движения конструкции (иногда именуемой динамической матрицей).
Фазовая оценка. Разность (в радианах или градусах) между двумя синусоидальными сигналами. Любой синусоидальный сигнал можно разложить на 3 постоянных параметра - амплитуду, фазу и частоту, которые определяют значение (величину) сигнала в любое время t. Сигналы преобразователя можно почти точно представить в виде синусоид с общей частотой и индивидуальной амплитудой и фазой для каждого. Разность фаз между сигналами преобразователя пропорциональна расходу.
Мера корреляции. Корреляция - это мера того, насколько выходная величина (например, движение, энергия, дельта t и т.п.) связана с входной величиной (например, силой, энергией, расходом и т.п.). Ее можно использовать для подтверждения, что предполагаемое соотношение (например, массовый расход пропорционален задержке времени) между измеренным и/или вычисленным значениями является верным. Переход от правильной корреляции к плохой может означать, что предполагаемое соотношение больше не является верным, например, из-за отказа датчика. Плохая корреляция может также объясняться вводом в систему дополнительной энергии, которой не было при первоначальной установке или калибровке. Например, кориолисов датчик (преобразователь), хорошо работающий в лабораторных условиях, где единственным вводом энергии является рабочий орган, может выдавать ошибки в поточных измерениях, когда он подвергается воздействию шумовых потоков, вызванных попаданием воздуха, при возникновении значительной дополнительной энергии из-за потока. Мера корреляции, например стандартная погрешность оценки, может указывать на изменение системы.
Модальное преобразование. Изменение системы координат из физической области в модальную область, определяемое как х=Фη, где η - модальная координата. Модальная координата - это одна из тех математических концепций, которые можно принять в качестве определяющих что-то и затем анализировать, является ли это определение полезным. Ее можно также рассматривать как нечто настолько простое, что оно идет от определения круга в плоскости х-у с использованием полярных координат, требующего, чтобы изменялись и х, и у, к использованию полярных координат r и Θ, где должно изменяться только Θ. Преобразование в новые координаты упрощает описание системы.
Квадратурные первый и второй опорные сигналы. Стандартный путь демодуляции синусоидальных сигналов. Демодуляция - это способ оценки амплитуды и фазы любой синусоиды, когда известна ее частота. Узкополосный режекторный фильтр обеспечивает частотную оценку сигналов преобразователей. Из частотной оценки функция "тильды" формирует две синусоиды с одинаковой частотой, но со сдвигом фазы на 90 градусов относительно друг друга (определение квадратуры: сдвиг фазы на 90 градусов), обычно при некоторой единице амплитуды.
Масштабная функция. Умножение сигнала на константу или вектор констант.
Расширенная матрица. Расширение матрицы - это добавление строк и столбцов к данной матрице. Используется для объединения неизвестной матрицы с известной константой для использования полного размера решения задачи, т.е. добавления к матрице столбца единиц или строки нулей. Пополнение параметра наклона параметром отрезка является стандартным подбором кривой методом наименьших квадратов.
Параметр наклона и отрезка. Уравнение y=mx+b является параметрическим представлением линии. При этом m - параметр наклона, a b - параметр отрезка.
Псевдоинверсия расширенной матрицы. Математически линию можно подогнать точно к двум точкам. Однако любые две точки данных также имеют неизвестную шумовую составляющую. Подгонка линии к любым двум точкам дает шумовую оценку линии. Использование множества наборов точек данных может усреднить реальный шум, обеспечив лучшую, менее шумовую оценку параметров наклона и отрезка. Одним из путей подгонки прямой линии через множество точек с большим количеством шума является использование метода наименьших квадратов. Метод наименьших квадратов уменьшает сумму расстояний всех точек данных от подогнанной линии. Псевдоинверсия является эффективным стандартным способом реализации процесса подгонки по методу наименьших квадратов. Использование расширенной матрицы в псевдоинверсии позволяет найти параметры наклона и отрезка за одно вычисление. Расширение матрицы для псевдоинверсии позволяет наилучшим образом подогнать линию к ненулевому параметру отрезка, т.е. она не должна проходить через начало.
Краткое описание чертежей
На фиг.1 представлена принципиальная схема конструкции датчика расхода с изогнутой трубкой.
На фиг.2 представлена принципиальная схема конструкции датчика расхода с прямой трубкой.
На фиг.3 представлено схематически устройство для оценки массового расхода согласно вариантам реализации изобретения.
На фиг.4 представлена схематически схема обработки сигнала согласно другим вариантам реализации изобретения.
На фиг.5 представлено схематически устройство для оценки массового расхода согласно другим вариантам реализации изобретения.
На фиг.6 представлено схематически устройство для оценки массового расхода и плотности согласно вариантам реализации изобретения
На фиг.7 представлено схематически устройство для формирования фазовых оценок согласно вариантам реализации изобретения.
На фиг.8 представлено схематически устройство для формирования фазовых оценок согласно другим вариантам реализации изобретения.
На фиг.9 представлено схематически устройство для формирования оценок разности времени согласно вариантам реализации изобретения.
На фиг.10 представлен алгоритм, иллюстрирующий операции оценки массового расхода согласно вариантам реализации изобретения.
На фиг.11 представлен алгоритм, иллюстрирующий операции оценки массового расхода согласно другим вариантам реализации изобретения.
На фиг.12 и 13 представлены временные диаграммы сигналов, иллюстрирующие операции оценки массового расхода согласно изобретению.
На фиг.14 представлен алгоритм, иллюстрирующий операции итеративной оценки масштабного вектора массового расхода согласно вариантам реализации настоящего изобретения.
На фиг.15 представлен алгоритм, иллюстрирующий операции формирования фазовых оценок согласно вариантам реализации изобретения.
На фиг.16 представлен алгоритм, иллюстрирующий операции оценки массового расхода согласно другим вариантам реализации изобретения.
На фиг.17 представлен алгоритм, иллюстрирующий операции формирования оценок разности согласно вариантам реализации изобретения.
На фиг.18 представлен алгоритм, иллюстрирующий операции оценки массового расхода согласно вариантам реализации изобретения.
На фиг.19 представлен алгоритм, иллюстрирующий операции оценки плотности согласно вариантам реализации изобретения.
На фиг.20А, 20В и 21-27 представлены временные диаграммы сигналов, иллюстрирующие примерные эффекты изменения системы согласно аспектам изобретения.
На фиг.28-30 представлены алгоритмы, иллюстрирующие операции контролирования состояния системы и компенсации изменений системы согласно вариантам реализации изобретения.
Подробное описание вариантов осуществления изобретения
В дальнейшем настоящее изобретение будет описано более подробно со ссылками на прилагаемые чертежи, иллюстрирующие его предпочтительные варианты осуществления. Однако изобретение можно реализовать и во многих других формах, поэтому не следует толковать его как ограниченное изложенными вариантами, напротив, эти варианты предусмотрены для того, чтобы данное раскрытие было всесторонним и полностью передавало сущность изобретения специалистам. Одни и те же элементы на чертежах обозначены одинаковыми ссылочными номерами. Специалистам будет понятно, что настоящее изобретение может быть реализовано в системах (устройствах), способах или программных продуктах для вычислительных машин.
Описанные варианты реализации настоящего изобретения относятся к кориолисовым массовым расходомерам. Однако специалистам будет понятно, представленное изобретение можно в общем применить для определения движения в широком спектре механических конструкций и поэтому предложенные устройства и способы не ограничены кориолисовым расходомером.
Как будет понятно специалистам, настоящее изобретение можно реализовать в форме устройства, и/или способа, и/или программного продукта для вычислительной машины. Соответственно, настоящее изобретение может быть реализовано в аппаратных средствах или в комбинации аппаратных и программных средств. Кроме того, настоящее изобретение может также быть реализовано в форме программного продукта для вычислительной машины, включая машиночитаемую запоминающую среду, имеющую используемый компьютером программный код, реализованный в запоминающей среде. Можно использовать любую машиночитаемую запоминающую среду, включая полупроводниковые запоминающие устройства (например, ОЗУ, ПЗУ, ЭППЗУ и т.п.), жесткие диски, CD-ROM, оптические запоминающие устройства и магнитные запоминающие устройства.
Компьютерный программный код для осуществления операций настоящего изобретения может быть написан на объектно-ориентированном языке программирования, таком как Ява или С++, и/или на процедурных языках программирования, таких как "С". Программный код может исполняться в одной вычислительной машине или устройстве обработки данных, таком как микроконтроллер, микропроцессор или процессор цифровых сигналов (ПЦС), или же во множестве устройств, например во множестве устройств обработки данных, которые сообщаются через последовательные или параллельные шины данных с электронной печатной платой, шасси или узлом, или которые образуют часть сети передачи данных, такой как локальная сеть (LAN), или глобальная сеть (WAN), или Интернет.
Настоящее изобретение будет описано ниже со ссылкой на иллюстрации в виде алгоритмов и/или блок-схем способов, устройств (систем) или компьютерных программных продуктов согласно вариантам реализации изобретения. Понятно, что каждый блок алгоритма и/или блок-схемы и комбинации блоков алгоритмов и/или блок-схем может быть реализован с помощью компьютерного программного кода (команд). Эти компьютерные программные коды могут подаваться в процессор универсальной вычислительной машины, специализированной вычислительной машины или другого программируемого устройства обработки данных для обеспечения механизма, позволяющего с помощью команд, исполняемых через процессор вычислительной машины или другого программируемого устройства обработки данных, создать средство для реализации функций, указанных в алгоритме и/или блоке или блоках блок-схемы.
Эти компьютерные программные продукты также можно реализовать в машиночитаемой запоминающей среде (например, магнитном диске или полупроводниковом запоминающем устройстве, программном магнитном запоминающем устройстве или т.п.), которая может предписывать вычислительной машине или другому программируемому устройству обработки данных функционировать конкретным способом, чтобы компьютерная программа, хранимая в машиночитаемой памяти, обеспечивала промышленное изделие, включая средства команд, которые реализуют функцию, указанную в алгоритме и/или блоке или блоках блок-схемы.
Компьютерный программный код можно также загрузить в вычислительную машину или другое программируемое устройство обработки данных для вызова осуществления ряда рабочих этапов в вычислительной машине или другом программируемом устройстве для обеспечения реализуемого в вычислительной машине процесса, при котором код, выполняемый в вычислительной машине или другом программируемом устройстве, обеспечивает этапы реализации функций, заданных алгоритмом, и/или блоком или блоками блок-схемы.
Модальное поведение вибрационной схемы
Поведение вибрационной конструкции, такой как трубка кориолисова массового расходомера, можно описать на основе одной или более собственных мод, имеющих соответствующие собственные частоты вибрации. Моды и соответствующие им собственные частоты можно математически описать собственными векторами и соответствующими собственными значениями, причем собственные векторы являются индивидуальными по относительной величине, но не по абсолютной величине и ортогональны относительно массы и жесткости конструкции. Линейно независимый набор векторов можно использовать в качестве преобразования для разделения уравнений, которые описывают перемещение (движение) конструкции. В частности, отклик конструкции на возбуждение можно представить как наложение масштабированных мод, причем масштабирование представляет вклад каждой моды в движение конструкции. В зависимости от возбуждения некоторые моды могут вносить больший вклад, чем другие. Некоторые моды могут быть нежелательными, так как они могут увеличивать энергию на резонансной частоте требуемых мод и поэтому нарушать измерения, снимаемые на резонансной частоте требуемой моды, например измерения разности фаз, снимаемые на частоте возбуждения.
В обычных кориолисовых массовых расходомерах для уменьшения эффектов нежелательных мод обычно используется конструктивная и временная фильтрация. Традиционные методы конструктивной фильтрации включают в себя использование механических элементов, таких как скобы, выполненные с возможностью разъединения синфазных и внефазных изгибающих мод, рабочие органы, расположенные таким образом, чтобы они наименее вероятно возбуждали нежелательные моды, и измерительные преобразователи, расположенные таким образом, чтобы они были менее чувствительны к нежелательным модам. Методы конструктивной фильтрации могут быть очень эффективны для уменьшения энергии нежелательных мод, но на них могут накладываться геометрические и производственные ограничения.
Методы временной фильтрации обычно изменяют сигналы измерительного преобразователя на основании параметров временной области или частотной области. Например, типичный кориолисов массовый расходомер может включать в себя частотные фильтры, предназначенные для удаления частотных составляющих, которые существенно коррелируют с нежелательными модами. Однако нерезонансная энергия нежелательных мод может вносить существенный вклад в резонансную частоту требуемой моды. Так как частотные фильтры обычно неэффективны для различения вклада множества мод на данной частоте, то вклад нежелательных мод в частоту измерения может быть существенным источником погрешности в измерениях параметра процесса.
Для конфигурирования трубки датчика с пренебрежимо малым демпфированием и нулевым расходом можно предположить, что она имеет только реальные собственные или нормальные моды вибрации, т.е. в каждой моде каждая точка конструкции одновременно достигает максимальной разности. Однако реальная трубка, имеющая непренебрежимо малое демпфирование и протекающий через нее материал, обеспечивает в целом сложный отклик на возбуждение, т.е. точки конструкции обычно не достигают максимальной амплитуды одновременно. Движение (перемещение) конструкции трубки можно описать как комплексную моду, имеющую вещественную и мнимую составляющие, или, альтернативно, составляющие величины и фазы. Кориолисовы силы, создаваемые текущим материалом, делают движение трубки датчика математически комплексным.
Однако даже комплексное движение конструкции трубки можно описать как наложение масштабированных собственных ("нормальных" или "с одной степенью свободы" (СОСС) мод, так как вещественная и мнимая части комплексной моды линейно независимы по определению. Для представления комплексного движения можно использовать комплексные масштабные коэффициенты при объединении составляющих вещественных нормальных мод. Конкретные вещественные нормальные моды могут быть тесно коррелированны с мнимой составляющей комплексной моды, но значительно менее коррелированны с вещественной составляющей комплексной моды. Соответственно, эти конкретные вещественные нормальные моды могут быть более тесно коррелированны с кориолисовыми силами, связанными с материалом в трубке датчика, и поэтому могут обеспечивать информацию для получения точной оценки параметра, связанного с данным материалом.
На фиг.1 представлена принципиальная модель одного типа датчика 100 кориолисова массового расходомера. Измерительные преобразователи 105А, 105В, 105С, 105D движения (например, измерительные преобразователи скорости) расположены с возможностью обнаружения относительного движения первой и второй изогнутых трубок 103А, 103В датчика 100, которым придает вибрацию рабочий орган 106, при прохождении материала 108 через трубки 103А, 103В, измерительные преобразователи 105А, 105В, 105С, 105D движения, вырабатывающие сигналы движения 109. Датчик 200 кориолисова расходомера с "прямой трубкой", показанный на фиг.2, содержит трубку 203, вмещающую материал 208 из трубопровода 207, подсоединенного к датчику 200 на фланцах 202. В корпусе 204, окружающем трубку 203, рабочий орган 206 возбуждает трубку 203. Измерительные преобразователи 205А, 205В, 205С, 205D движения (например, измерительные преобразователи скорости, акселерометры или другие чувствительные к движению устройства) расположены вдоль трубки 203. Измерительные преобразователи 205А, 205В, 205С, 205D движения вырабатывают сигналы 209 движения, характеризующие движение трубки 203 в ответ на множество сил F, которые могут включать в себя, например, возбуждающую силу, создаваемую рабочим органом 206. Кориолисовы силы, возникающие из текущего материала 208, силы давления, создаваемые материалом 208, и другие посторонние силы, например силы, создаваемые трубопроводом 207 и насосами, компрессорами и другим оборудованием (не показаны), подсоединенными к трубопроводу 207, передаются трубке 203 через фланцы 202.
Для такой конструкции расходомера, как показано на фиг.1 и фиг.2, можно построить вектор ответа х из сигналов, вырабатываемых измерительными преобразователями движения, которые функционально связаны с конструкцией, таких как сигналы 109, 209 движения, вырабатываемые измерительными преобразователями 105А, 105В, 105С, 105D, 205А, 205В, 205С, 205D движения, изображенными на фиг.1 и фиг.2. Например, можно произвести выборку сигналов движения для формирования значений сигналов движения x1, х2, ... xn вектора ответа х. Вещественную нормальную модальную матрицу Ф, т.е. матрицу собственных векторов, связывающую между собой физический вектор движения и модальный вектор движения η, характеризующий движение в множестве собственных мод (СОСС), можно определить так, что

Модальную матрицу Ф можно определить с помощью ряда методов, включая методы проб и ошибок или методы обратного преобразования.
Примеры массовых расходомеров
Согласно вариантам реализации настоящего изобретения методы модоселективной фильтрации используются для получения сигналов движения, отфильтрованных методом модоселективной фильтрации, которые затем используются для выработки фазовых оценок, а те, в свою очередь, используются для получения оценки массового расхода. Далее будут описаны примерные варианты согласно данному аспекту настоящего изобретения, в частности варианты с использованием датчиков с "прямой трубкой", подобных датчику 200 на фиг.2. Однако специалистам будет понятно, что настоящее изобретение также применимо и в конструкциях с изогнутой трубкой, подобных датчику 100 на фиг.1, а также в других вмещающих материал конструкциях, используемых в массовых расходомерах, денсиметрах и т.п. Специалистам также будет понятно, что настоящее изобретение также применимо для определения характеристик движения в целом ряде других конструкций.
На фиг.3 представлено устройство 300 для оценки массового расхода согласно вариантам осуществления настоящего изобретения. Устройство 300 содержит вмещающую материал трубку 203 и функционально подсоединенные измерительные преобразователи 205А, 205В, 205С, 205D движения датчика 200 расходомера, а также блок 301 обработки сигналов, вырабатывающий оценку массового расхода из сигналов 305 движения, сформированных измерительными преобразователями 205А, 205В, 205С, 205D движения. На фиг.2 и 3 элементы, подобные элементам датчика 200, подробное описание которых не повторяется в свете описания фиг.2, обозначены такими же ссылочными номерами.
Блок 301 обработки сигналов содержит модоселективный фильтр 310, выполненный с возможностью приема сигналов 305 движения и селективного пропускания одной или более составляющих сигналов 305 движения для получения множества сигналов 315 движения, отфильтрованных методом модоселективной фильтрации. Блок 301 обработки сигнала также содержит блок 320 оценки фазы, который в ответ на сигналы 315 движения, отфильтрованные методом модоселективной фильтрации, формирует из них множество фазовых оценок 325. Блок 301 обработки сигналов дополнительно содержит блок 330 оценки массового расхода, который под действием блока 320 оценки фазы формирует оценку 335 массового расхода из множества фазовых оценок 325.
На фиг.4 показан примерный вариант реализации модоселективного фильтра 410, блока 420 оценки фазы и блока 430 оценки массового расхода согласно изобретению. АЦ преобразователь 440 осуществляет выборку множества сигналов движения 405а, например аналоговых выходных сигналов из измерительных преобразователей скорости или другого движения, функционально связанных с трубкой или другой вмещающей материал емкостью, и оцифровывает их, формируя множество цифровых сигналов 405b движения. Цифровые сигналы 405b движения обрабатываются модоселективным фильтром 410 для получения множества цифровых сигналов 415 движения, отфильтрованных методом модоселективной фильтрации. Блок 420 цифровой оценки фазы формирует множество цифровых оценок 424 фазы из множества цифровых сигналов 415 движения, отфильтрованных методом модоселективной фильтрации. Блок 430 цифровой оценки массового расхода формирует цифровую оценку 435 массового расхода из множества цифровых оценок 425 фазы. Как показано, модоселективный фильтр 410, блок 420 оценки фазы и блок 430 оценки массового расхода могут быть реализованы в виде машиночитаемого программного кода, исполняемого процессором 450 данных, например комбинацией вычислительной машины (например, микроконтроллера, микропроцессора, процессора цифровых сигналов (ПЦС) или другого вычислительного устройства) и соответствующей запоминающей среды (например, полупроводникового магнитного запоминающего устройства или оптического запоминающего устройства).
На фиг.5 представлен примерный вариант реализации устройства 500 для оценки массового расхода согласно другим вариантам настоящего изобретения. Устройство 500 содержит вмещающую материал трубку 203 и функционально связанные с нею измерительные преобразователи 205А, 205В, 205С, 205D движения датчика 200 с прямой трубкой, подобного описанному со ссылкой на фиг.2, подробное описание которого не будет повторяться в свете описания фиг.2. Блок 501 обработки сигналов включает в себя модоселективный фильтр 510, выполненный с возможностью приема сигналов 505 движения, вырабатываемых датчиком 200, и селективного пропускания одной или более составляющих сигналов 505 движения для получения множества сигналов движения 515, фильтрованных методом модоселективной фильтрации. Модоселективный фильтр 510 также формирует по меньшей мере один модальный сигнал 517 движения, т.е. по меньшей мере один сигнал, который характеризует движение трубки 203 в модальной области, определенной по меньшей мере одной собственной (СОСС) модой трубки 203. Модоселективный фильтр 510 предпочтительно создан на основании определения модальных параметров датчика 200.
Блок 501 обработки сигналов дополнительно содержит блок 520 оценки фазы, реагирующий на модоселективный фильтр 510 и вырабатывающий множество фазовых оценок 525 из множества сигналов 515 движения, отфильтрованных методом модоселективной фильтрации. Блок 501 обработки сигналов также включает в себя блок 530 оценки массового расхода, который реагирует на блок 520 фазовой оценки и вырабатывает оценку 535 массового расхода из множества фазовых оценок 525, используя, по меньшей мере, одну оценку 545 частоты моды, сформированную блоком 540 оценки частоты моды. Блок 540 оценки частоты моды формирует, по меньшей мере, одну оценку 545 частоты моды в ответ, по меньшей мере, на один модальный сигнал 517 движения. Блок 501 обработки сигналов дополнительно содержит блок 550 оценки плотности, реагирующей, по меньшей мере, на одну оценку 545 частоты моды для формирования оценки 555 плотности.
На фиг.6 представлено устройство 600, предназначенное для оценки массового расхода и плотности из множества сигналов 605 движения согласно вариантам изобретения. Устройство 600 содержит модоселективный фильтр 610, блок 620 оценки фазы, блок 630 массового расхода, блок 640 оценки частоты моды и блок 650 оценки плотности. Модоселективный фильтр 610 (или фильтр пропуска мод) содержит блок 612 модального преобразования, который преобразует множество сигналов 605 движения в множество модальных сигналов 614 движения, которые характеризуют движение в множестве собственных мод, как было описано выше со ссылкой на уравнение (1). Модоселективный фильтр 610 также содержит блок 614 модоселективного преобразования, который селективно преобразует множество модальных сигналов 613 движения обратно из модальной области, формируя сигналы 615 движения, отфильтрованные методом модоселективной фильтрации, которые фильтруются таким образом, что составляющие исходных сигналов 615 движения, которые связаны с одной или более требуемых мод, предпочтительно пропускаются по сравнению с составляющими, связанными с другими нежелательными собственными модами. Модальные сигналы 613 движения пропускаются в блок 640 оценки частоты моды, который формирует одну или более оценок 645 частоты моды.
Сигналы 615 движения, отфильтрованные методом модоселективной фильтрации, пропускаются в блок 620 оценки фазы, который формирует из них множество фазовых оценок 625, используя опорную фазу, которую получают из множества сигналов 605 движения. Например, как будет подробно описано со ссылкой на фиг.7 ниже, опорная фаза может быть получена из одного или более сигналов 615 движения, отфильтрованных методом модоселективной фильтрации. Альтернативно, опорную фазу можно получить из одной или более оценок 645 частоты моды, сформированных из одного или более модальных сигналов 613 движения блоком 640 оценки частоты моды.
Фазовые оценки 625 пропускаются в блок 630 оценки массового расхода, который включает в себя блок 632 оценки разности времени и пространственный интегратор 634. Используя одну или более оценок 645 частоты моды, сформированных блоком 640 оценки частоты моды, блок 632 оценки разности времени формирует множество оценок 633 разности времени из множества фазовых оценок 625. Блок 640 оценки разности времени может также использовать опорные разности 631 времени нулевого расхода, т.е. значения, представляющие разности времени в условиях нулевого массового расхода, которые могут разрушить измерения при других скоростях массового расхода, для получения разностей 633 времени, скорректированных на такой "нулевой сдвиг". Как будет описано ниже, блок 640 оценки частоты моды может сформировать оценку частоты моды возбуждения и фазовые оценки можно разделить на эту оцененную частоту моды возбуждения для получения нескорректированных оценок разности времени. Нескорректированные оценки разности времени можно затем скорректировать с использованием опорных разностей 631 времени нулевого расхода (например, путем вычитания из него) для получения оценок 633 разности времени.
Оценки 633 разности времени, сформированные блоком 632 оценки разности времени, подаются в пространственный интегратор 634. Как будет более подробно описано ниже, пространственный интегратор 634 может определить параметр наклона функции масштабного вектора, которая связывает множество оценок 633 разности времени с множеством опорных разностей 637 времени, соответствующих известному массовому расходу. Этот параметр наклона можно затем использовать для выработки оценки 635 массового расхода из известного массового расхода.
Как также показано на фиг.6, блок 650 оценки плотности может использовать оценку 645 частоты моды для формирования оценки плотности материала, для которого определяется массовый расход. Блок 650 оценки плотности может использовать методы, подобные тем, которые используются для формирования оценки 655 плотности из сигнала измерительного преобразователя, не подвергнутого модоселективной фильтрации. Например, согласно вариантам настоящего изобретения оценки плотности можно формировать, используя оценки частоты моды вместо обычных оценок частоты, используемых в упомянутых выше патентах.
На фиг.7-9 показаны примерные конструкции для реализации различных элементов, изображенных на фиг.6. Понятно, что модоселективный фильтр 610, блок 620 оценки фазы, блок 630 оценки массового расхода, блок 640 оценки частоты моды, изображенные на фиг.6, а также конструкции на фиг.7-9 можно реализовать в цифровом виде, например в виде исполняемых модулей, подпрограмм, объектов и/или других видов программных и/или программно-аппаратных средств, реализованных в микропроцессоре, микроконтроллере, ПЦС или другом вычислительном устройстве. При таких реализациях "сигналы", например модальные сигналы 613 движения, сигналы 615 движения, отфильтрованные методом модоселективной фильтрации, и фазовые оценки 633 могут включать векторы значений цифровых сигналов, которые получаются через интервалы вычислений и на которых осуществляются вычисления для реализации описанных функций. Однако при этом понятно, что все или некоторые из этих сигналов могут, в общем, быть цифровыми или аналоговыми и что осуществляемые на них операции могут выполняться специальными цифровыми аппаратными средствами и/или аналогичными аналоговыми аппаратными средствами.
На фиг.7 представлен пример блока 700 оценки фазы согласно вариантам настоящего изобретения. Блок 700 оценки фазы содержит блок 710 оценки частоты, который оценивает частоту сигнала 7011 из множества сигналов 7011, 7012, ... 701n движения, отфильтрованных методом модоселективной фильтрации. Блок 710 оценки частоты формирует оценку 715 частоты, которая подается в генератор 720 квадратурного опорного сигнала, формирующий первый и второй (например, синусный и косинусный) опорные сигналы 725а, 725b, имеющие оцененную частоту и сдвинутые по фазе на 90° относительно друг друга. Блок 710 оценки частоты может, например, быть цифровым адаптивным режекторным фильтром, который определяет оценку 715 частоты, и генератор 720 квадратурного опорного сигнала может формировать квадратурные опорные сигналы 725а, 725b с использованием функции "тильды". Однако, понятно, что другие методы, включая другие методы обработки цифровых и аналоговых сигналов для формирования фазового и квадратурного опорных сигналов, можно использовать для выработки оценки 715 частоты и/или квадратурных опорных сигналов 725а, 725b. Например, вместо формирования оценки 715 частоты из отфильтрованного методом модоселективной фильтрации сигнала, как показано на фиг.7, оценка частоты может быть оценкой частоты моды, например, как одна или несколько оценок 645 частоты моды, вырабатываемых блоком 640 оценки частоты моды на фиг.6.
Первый и второй сигналы 725а, 725b опорной фазы подаются в множество вычислителей 7301, 7302, ... 730n фазы, которые соответственно формируют фазовые оценки 7351, 7352, ... 735n из соответствующих сигналов 7011, 7012,..701n движения, отфильтрованных методом модоселективной фильтрации. Затем фазовые оценки 7352, ... 735n нормируются относительно одной из фазовых оценок 7351 нормализатором 740 для выработки множества нормированных фазовых оценок 7451, 7452, ... 745n. Нормированные фазовые оценки 7451, 7452, ... 745n можно затем использовать для оценки массового расхода, как было описано выше со ссылкой на фиг.6.
Возвратимся к фиг.6. Блок 640 оценки частоты моды может использовать методы оценки частоты, аналогичные тем, которые были описаны выше со ссылкой на фиг.7. Например, можно использовать адаптивные методы режекторной фильтрации с определением частоты для выработки, по меньшей мере, одной оценки 645 частоты для, по меньшей мере, одного из модальных сигналов 617 движения.
На фиг.8 проиллюстрированы примерные вычислительные операции для демодуляции сигнала 701j движения, отфильтрованного методом модоселективной фильтрации, с использованием синтезированных квадратурных (например, синусного и косинусного) опорных сигналов 725а, 725b. Сигнал 701j движения, отфильтрованный методом модоселективной фильтрации, отдельно умножается на каждый из квадратурных опорных сигналов 725а, 725b для формирования вещественного и мнимого составляющих сигналов 805b, 805а. Вычислитель 810 арктангенса затем вычисляет арктангенс вещественного и мнимого составляющих сигналов 805b, 805а для получения фазовой оценки 735j. Предпочтительно, чтобы вещественный и мнимый составляющие сигналы 805b, 805а фильтровались перед применением вычислителя 810 арктангенса для ослабления непостоянных (DC) составляющих сигналов 805b, 805а.
На фиг.9 представлена примерная схема вычислений для получения скорректированных оценок 633 разности времени согласно вариантам настоящего изобретения. Вектор фазовых оценок 625 (который может быть нормирован) делится на оцененную частоту 645 моды, предпочтительно одну или более частот, связанных с модой возбуждения. Полученный вектор разностей 915 времени затем корректируется путем вычитания соответствующего вектора опорных разностей времени для нулевого расхода 631, в результате чего получается вектор скорректированных оценок 633 разности времени. Альтернативно можно обеспечить аналогичную коррекцию посредством вычитания вектора фазовых значений, связанных с нулевым расходом, из фазовых оценок 7351, 7352, ... 735n, описанных выше.
Пространственная интеграция оценок разности времени
Согласно другим аспектам настоящего изобретения оценки разности времени, такие как скорректированные оценки разности времени, описанные выше, можно получать с использованием процедуры "пространственной интеграции" для выработки оценки массового расхода. Согласно различным вариантам настоящего изобретения, описанным ниже, можно использовать многочисленные методы для определения параметра наклона, который связывает между собой оценки разности времени, связанные с неизвестным массовым расходом, и опорные разности времени, связанные с известным массовым расходом, включая методы псевдоинверсии с закрытой формой и итерационные методы. Этот параметр наклона можно использовать для получения оценки неизвестного массового расхода.
Как описано в упомянутой выше заявке на патент США №09/116410, поданной 16 июля 1998, можно определить вектор Ye значений разности времени при известном массовом расходе Fc и можно описать неизвестный массовый расход на основании этого вектора Ye опорной разности времени с помощью скалярного умножения, то есть вектор оцененных разностей времени Ху для неизвестного массового расхода можно масштабировать с помощью масштабного коэффициента а (далее именуемого как "параметр наклона") для получения вектора Ye опорной разности времени. Для определения неизвестного массового расхода известный массовый расход Fc умножается на параметр наклона a. Вектор Ye опорной разности времени и вектор Хе оценки разности времени можно связать между собой как

После преобразования уравнения (2) получим

где расширенная матрица Z формируется путем пополнения вектора Ye опорной разности времени столбцом единиц. Уравнение (3) можно решить для масштабного коэффициента c путем предварительного умножения вектора Хе оценки разности времени на псевдоинверсию W расширенной матрицы Z:

где обратный оператор матрицы (-1) используется для обозначения псевдоинверсии. Решение для вектора c с последующим умножением Fc на параметр наклона a вектора c может обеспечить оценку массового расхода.
На фиг.10 и 11 представлены алгоритмы, иллюстрирующие примерные операции для формирования оценки массового расхода из множества оценок разности времени согласно различным вариантам реализации настоящего изобретения. Специалистам будет понятно, что операции этих алгоритмов можно реализовать с использованием команд вычислительной машины. Эти команды можно осуществлять в вычислительной машине или другом устройстве обработки данных, например процессоре 450, представленном на фиг.4, для создания устройства (системы), способной осуществлять проиллюстрированные операции. Команды вычислительной машины можно также хранить в виде машиночитаемого программного кода в машиночитаемой среде, например запоминающем устройстве на интегральных схемах, магнитном диске, ленте или т.п., которые могут предписывать вычислительной машине или другому устройству обработки данных осуществлять проиллюстрированные операции, обеспечивая тем самым средство для выполнения проиллюстрированных операций. Машиночитаемый программный код можно также исполнять в вычислительной машине или другом устройстве обработки данных, чтобы побудить устройство осуществлять процесс, реализуемый компьютером. Соответственно, фиг.10 и фиг.11 поддерживают устройства (системы), компьютерные программные продукты и способы осуществления проиллюстрированных операций.
На фиг.10 показаны операции 1000 для формирования оценки массового расхода из вектора Хе оценок разности времени вдоль описанных выше линий согласно вариантам реализации настоящего изобретения. Определяется псевдоинверсия W расширенной матрицы Z, включающая в себя вектор Ye опорных разностей времени, связанных с известным массовым расходом Fc, пополненная столбцом единиц (блок 1010). Определение расширенной матрицы Z и псевдоинверсии W можно осуществлять периодически, например во время калибровки, для уменьшения вычислительной нагрузки. Вектор Хе оценок разности времени умножается на псевдоинверсию W для получения масштабного вектора, включающего параметр наклона a и параметр отрезка b (блок 1020). Параметр наклона a затем умножается на известный массовый расход Fc для получения оценки массового расхода (блок 1030). Понятно, что оценку массового расхода можно обрабатывать дальше, например, оценку массового расхода можно усреднить с другими оценками массового расхода, определенными в течение какого-то периода времени, для получения отфильтрованного измерения массового расхода (блок 1040). Можно также контролировать параметр отрезка b, например, для обнаружения изменений в системе (блок 1050).
Существует ряд преимуществ контролирования параметра отрезка b вектора c, которые будут подробно описаны ниже. Однако вычисление параметра отрезка b не является необходимым для получения оценки массового расхода. Уравнение (2) можно переписать как

используя параметр отрезка b. Уравнение (5) можно рассматривать как попытку согласования формы вектора Хе оценки разности времени с формой вектора Ye опорной разности времени без учета фазового нормирования. Уравнение (5) может работать, если вектор Ye оценки разности времени и вектор Хе опорной разности времени произвольно нормируются, и может обеспечивать лучшие результаты, если все фазы нормируются опорной фазой перед определением оценок Хе разности времени. Для решения параметра наклона a можно использовать следующее отношение:

На фиг.11 показаны операции 1100 для формирования оценки массового расхода без определения параметра отрезка b согласно вариантам реализации настоящего изобретения. Определяется псевдоинверсия Ye -1 вектора Ye опорных разностей времени, связанных с известным массовым расходом Fc (блок 1110). Определение псевдоинверсии Ye -1 можно осуществлять периодически, например во время калибровки, для уменьшения вычислительной нагрузки. Вектор Хе оценок разности времени умножается на псевдоинверсию Ye -1 для определения параметра наклона a (блок 1120). Параметр наклона a затем умножается на известный массовый расход Fc для получения оценки массового расхода (блок 1130). Понятно, что оценку массового расхода можно обрабатывать дальше, например, оценку массового расхода можно усреднить с другими оценками массового расхода, определенными в течение некоторого периода времени, для получения отфильтрованного измерения массового расхода (блок 1140).
На фиг.12 и 13 показаны графически результаты тестов для модели кориолисова массового расходомера согласно вариантам реализации изобретения, которые иллюстрируют, что определение параметра отрезка b не требуется для получения оценок массового расхода. В частности, на фиг.12 и 13 показано, что оценки массового расхода, сформированные в течение рассматриваемых интервалов времени (приблизительно от 10 до 30 секунд) с использованием соответствующих методов псевдоинверсии, описанных выше (т.е. соответственно с определением и без определения параметра отрезка b), показывают аналогичную степень согласования с экспериментальными измерениями массового расхода для этих интервалов времени, полученными с использованием других средств.
Согласно другим вариантам реализации настоящего изобретения для решения вектора c можно использовать итеративный метод вместо описанных выше методов псевдоинверсии. Можно определить уравнение погрешности

и связанную с ним функцию стоимости

Можно использовать градиентный метод для нахождения решения, которое приводит функцию стоимости J к требуемому уровню, где градиент определяется как

Можно предпринять небольшие меры для снижения градиента до минимального значения функции стоимости J. На k-ом этапе получается новая оценка вектора c(k) с использованием следующего отношения:

где вектор c(k-1) - результат, полученный предыдущей итерацией (k-1), а γ - адаптивная скорость для процесса. Вычисления можно повторять многократно до тех пор, пока функция стоимости J не будет приведена к требуемому уровню. Для обеспечения сходимости значение γ должно быть больше нуля и меньше 2. Значение γ обычно влияет на скорость сходимости и чувствительность итерационного процесса к шуму. Обычно, чем больше значение γ, тем быстрее сходимость процесса; однако большое значение γ может повысить чувствительность к шуму. Оптимальное значение γ можно определить экспериментальным путем и типично оно составляет 0,1.
Уравнение (10) представляет метод наименьшей среднеквадратичной (НМСК) оценки параметра. Можно также использовать потенциально наиболее робастную версию нормированной наименьшей среднеквадратичной оценки этого адаптивного подхода:
где

и α - константа, которая включена для уменьшения правдоподобия неустойчивости численного решения, если норма Z приближается к нулю. Для обеспечения сходимости для уравнения (11) необходимо удовлетворить уравнение (12). Значение α предпочтительно является малым положительным значением и его можно выбрать экспериментальным путем.
На фиг.14 проиллюстрированы операции 1400 согласно вариантам реализации настоящего изобретения, в которых масштабный вектор c определяется итеративно вдоль описанных выше линий. Формируется вектор Хе оценок разности времени (блок 1410). Формируется исходная оценка масштабного вектора c(k) (блок 1420). Исходное значение c(k) может быть, например, нулем или конечной оценкой масштабного вектора c, полученной из предыдущего значения Хе. Предположив, что расход не претерпевает резких изменений между измерениями расхода, второй вариант выбора может повысить скорость сходимости, так как ранее оцененное значение масштабного вектора c должно быть близко к новому значению, которое следует определить. Определяют соответствующую погрешность L(k) и стоимость J(k), например, с помощью уравнений (7) и (8) (блок 1440). Если стоимость J(k) меньше, чем некоторое заданное значение, что свидетельствует о приемлемой точности оценки с(k) масштабного вектора, то можно получить оценку массового расхода (блоки 1450, 1455) и новый вектор оценок Хе разности времени (блок 1410). В противном случае формируется скорректированная оценка масштабного вектора c(k) с использованием, например, уравнения (10) или уравнения (11) (блоки 1460, 1470) и вычисляются новые значения погрешности и функции стоимости (блоки 1430, 1440).
Специалистам будет понятно, что с данным изобретением можно использовать и другие операции, кроме тех, которые были описаны со ссылкой на фиг.14. Например, понятно, что многие вычисления можно объединить или изменить. Также понятно, что существует множество различных итеративных методов, которые можно использовать для решения уравнения (3), помимо описанных выше методов оценки НМСК и ННМСК.
На фиг.15-19 представлены алгоритмы, иллюстрирующие примерные операции согласно различным вариантам реализации настоящего изобретения. Специалистам будет понятно, что операции проиллюстрированных алгоритмов можно реализовать с использованием команд вычислительной машины. Эти команды могут осуществляться вычислительной машиной или другим устройством обработки данных, например процессором 450 данных на фиг.4, для создания устройства (системы), способного выполнять проиллюстрированные операции. Команды вычислительной машины можно также хранить в виде машиночитаемого программного кода на машиночитаемой запоминающей среде, например памяти на интегральных схемах, магнитном диске, ленте и т.п., которые могут предписывать вычислительной машине или другому устройству обработки данных выполнять проиллюстрированные операции, обеспечивая средство осуществления этих операций. Машиночитаемый программный код можно также реализовывать в вычислительной машине или другом устройстве обработки данных, предписывающем устройству осуществлять реализуемый вычислительной машиной процесс. Следовательно, алгоритмы, представленные на фиг.15-19, поддерживают устройства (системы), компьютерные программные продукты и способы осуществления проиллюстрированных на них операций.
Согласно вариантам настоящего изобретения, проиллюстрированным на фиг.15, операции 1500 для выработки фазовых оценок, связанных с перемещением конструкции, включают модоселективную фильтрацию множества сигналов движения, характеризующих перемещение конструкции, для формирования соответствующего множества сигналов движения, отфильтрованных методом модоселективной фильтрации, например, с использованием методов, описанных выше со ссылкой на фиг.6 (блок 1510). Затем формируется множество фазовых оценок из множества сигналов движения, отфильтрованных методом модоселективной фильтрации (блок 1520).
В примерных операциях оценки массового расхода 1600 согласно вариантам реализации настоящего изобретения, проиллюстрированным на фиг.16, множество сигналов движения, характеризующих движение трубки, подвергаются модоселективной фильтрации для получения множества сигналов движения, отфильтрованных методом модоселективной фильтрации (блок 1610). Затем из множества сигналов движения, отфильтрованных методом модоселективной фильтрации, формируется множество фазовых оценок (блок 1620), которые используются для получения оценки массового расхода (блок 1630).
В примерных операциях оценки разности блок 1700 согласно другим вариантам реализации настоящего изобретения, проиллюстрированным на фиг.17, множество сигналов движения, характеризующих перемещение конструкции, подвергаются модоселективной фильтрации для получения множества сигналов движения, отфильтрованных методом модоселективной фильтрации (блок 1710). Частоту первого сигнала движения, отфильтрованного методом модоселективной фильтрации, определяют с использованием, например, операций адаптивной режекторной фильтрации, описанных выше со ссылкой на фиг.7 (блок 1720). Затем получают оценку разности, например оценку разности фаз и/или оценку разности времени, из второго сигнала движения, отфильтрованного методом модоселективной фильтрации, используя, например, операции демодуляции, описанные со ссылкой на фиг.7 (блок 1730).
На фиг.18 проиллюстрированы операции 1800 для формирования оценки массового расхода согласно следующим вариантам реализации настоящего изобретения. Множество сигналов движения, характеризующих перемещение (движение) трубки, обрабатывается для получения множества оценок разности, например оценок разности времени или оценок разности фаз (блок 1810). Затем оценивается параметр наклона, связывающий между собой множество оценок разности и множество опорных значений разности, соответствующих известному массовому расходу (блок 1820), и формируется оценка массового расхода из оцененного параметра наклона и известного массового расхода (блок 1830). Эти операции можно реализовать с использованием, например, операций, описанных выше со ссылкой на фиг.10 и 11.
В примерных операциях оценки плотности 1900 согласно другим вариантам реализации настоящего изобретения, проиллюстрированным на фиг.19, применяется модальное преобразование множества сигналов движения, характеризующих движение вмещающей материал емкости, для выработки по меньшей мере одного модального сигнала движения, характеризующего соответствующее движение в модальной области, охарактеризованной по меньшей мере одной вибрационной модой емкости (блок 1910). Затем определяется по меньшей мере одна частота моды из по меньшей мере одного модального сигнала движения (блок 1920) и определяется плотность материала в емкости из по меньшей мере одной оценки частоты моды (блок 1930), например, как было описано выше со ссылкой на фиг.6.
Контролирование пространственного отрезка или других мер корреляции для определения состояния системы
Как упоминалось выше со ссылками на фиг.10 и 11, хотя параметр отрезка b масштабного вектора c не требуется для оценки массового расхода, он может быть полезен для определения изменений системы, таких как отказ измерительного преобразователя движения, изменения условий монтажа и т.п. Потенциальная польза параметра отрезка проиллюстрирована графиками на фиг.20А-20В и фиг.21. Фиг.20А-20В графически иллюстрируют смоделированные изменения в вычисленном массовом расходе и параметре пространственного отрезка соответственно для отказов измерительного преобразователя движения через приблизительно 20 секунд, причем отказ конкретного измерительного преобразователя смоделирован посредством обнуления соответствующих элементов в векторах оценок разности времени, сформированных измерительным преобразователем. Как показано на фиг.20А, отказ измерительного преобразователя создает изменение в расчетном массовом расходе, которое может быть неправильно истолковано как действительное изменение массового расхода.
Изменение параметра отрезка можно использовать согласно вариантам реализации настоящего изобретения для запуска схемы коррекции ошибки. Например, как показано на фиг.20А и 20В, псевдоинверсию W расширенной матрицы W можно пересчитать путем нахождения строки, соответствующей отказавшему измерительному преобразователю, а затем использовать для выработки новых оценок массового расхода. Как видно на фиг.20А, когда такая коррекция применяется для оценок массового расхода, начинающихся приблизительно через 40 секунд, можно достичь более высокой точности. В частности, для показанного примера при такой коррекции достигается погрешность 0,5% по сравнению с погрешностью 4%, имеющей место без этой коррекции.
Как показано на фиг.21, которая иллюстрирует значения параметра отрезка для отказов каждого члена группы из пяти измерительных преобразователей движения, об отказах измерительного преобразователя движения может сигнализировать соответствующее большое изменение параметра отрезка - явление, которое обычно не происходит в ответ на простое изменение массового расхода. Другие изменения системы, например изменения в монтаже или других условиях, можно также идентифицировать по изменениям параметра отрезка. В частности, на фиг.22 показаны изменения параметра отрезка для кориолисова массового расходомера после добавления демпфирования в конструкцию измерителя.
Параметр отрезка является одной из множества различных мер корреляции, которые можно использовать для обнаружения изменений системы согласно вариантам реализации настоящего изобретения. В общем, после того, как был вычислен масштабный вектор c, приведенное выше уравнение (3) можно использовать для получения вектора Xest разностей времени, который является наименьшей квадратичной подгонкой "измеренного" вектора Хе разностей времени (полученного, как было описано выше) к базисному вектору:

Прогнозируемый вектор Xest разностей времени можно сравнить с измеренным вектором Хе оценок разности времени для получения меры корреляции, которую можно использовать для различных целей. Это сравнение можно осуществлять периодически или при каждом вычислении массового расхода.
В вариантах реализации настоящего изобретения можно получить коэффициент корреляции r из прогнозируемого вектора Xest разностей времени и использовать его для обнаружения изменений системы. Коэффициент корреляции r представляет собой безразмерную скалярную величину между +1 и -1 и использует величину  , представляющую собой среднее значение оценок Хе разности времени:
, представляющую собой среднее значение оценок Хе разности времени:

где N - количество точек данных, например количество сигналов измерительных преобразователей движения. Коэффициент корреляции r можно определить как отношение объяснимого изменения к общему изменению:

На фиг.23 проиллюстрировано, как можно использовать такой коэффициент корреляции, в частности, при определении отказа измерительного преобразователя. Массовый расход оценивается в течение первого периода времени 0-15 секунд с использованием векторов Хе оценок разности времени, полученных из сигналов движения, выданных измерительными преобразователями #1-#5. Полученные после этого векторы Хе оценок разности времени возмущаются посредством обнуления значений сигналов движения, соответствующих одному измерительному преобразователю (#2) от 15 до 30 секунд, чтобы смоделировать отказ этого преобразователя на данный период времени. Векторы Хе оценок разности времени снова возмущаются от 45 до 60 секунд посредством удвоения значения сигнала движения, связанного с измерительным преобразователем #2 для моделирования изменения с приращением в измерительном преобразователе, или "шумного" сигнала преобразователя. Как видно на фиг.23, оценка массового расхода уменьшается приблизительно до 20 фунт/мин, когда ввод измерительного преобразователя #2 обнуляется, и возрастает приблизительно до 15 фунт/мин при удвоении вводимого сигнала движения.
При стандартных методах измерения расхода может быть трудным определить, объясняются ли такие изменения действительными изменениями массового расхода или отказами измерений. Однако аналогично описанному выше методу с параметром отрезка можно использовать коэффициент корреляции r для обнаружения таких изменений системы. Как показано на фиг.24, иллюстрирующей поведение коэффициента корреляции r в течение такого же интервала времени, как на фиг.23, коэффициент корреляции r может показать относительно большое изменение значения с отказавшим (обнуленным) или "шумным" сигналом движения.
Погрешность оценки представляет собой другую меру корреляции, которую можно использовать для определения состояния системы. Стандартную погрешность оценки Sx,y можно выразить как
Как показано на фиг.25, иллюстрирующей поведение стандартной погрешности оценки sx,y для интервала времени на фиг.23 и фиг.24, стандартная погрешность оценки sx,y может проявлять большие изменения при описанных выше изменениях системы (следует отметить, что теория выборочного метода показывает, что для небольшого количества вводов измерительного преобразователя (например, 6) можно достичь большей точности посредством замены N в знаменателе на N-2).
Другие свойства меры погрешности оценки можно использовать для определения источника отказа, например, для определения конкретного отказавшего измерительного преобразователя. Стандартную погрешность оценки можно рассматривать как аналогичную стандартному отклонению набора данных, т.е. можно ожидать, что в течение 99,7% времени погрешность оценки разности времени будет в пределах трехкратной стандартной оценки погрешности sx,y прогнозируемого вектора Xest разностей времени. Следовательно, можно проверить соответствующие погрешности оценки для соответствующих оценок разности времени, связанных с соответствующими измерительными преобразователями, для определения, находятся ли они в рамках прогнозируемой кратной (например, трем) стандартной погрешности оценки. Такую проверку можно выразить следующим неравенством:

которое можно переписать следующим образом:

Для идентификации отказавшего измерительного преобразователя можно, например, применить критерий уравнений (17) и (18) к каждой составляющей каждого сформированного вектора оценок разности времени. Погрешность (Xe-Xest) конкретной оценки Хе разности времени, связанной с отказавшим измерительным преобразователем, типично будет во много раз выше стандартной погрешности оценки. Это проиллюстрировано на фиг.26, где показана погрешность (Xe-Xest) для отказавшего измерительного преобразователя #2 из группы преобразователей по сравнению со стандартной погрешностью оценки для данной группы (значения которой нормированы для удобства вычитания номинального вектора). Как показано на чертеже, погрешность, связанная с измерительным преобразователем #2, значительно выходит за границы стандартной погрешности оценки для данной группы (которая в показанном примере составляет приблизительно ±0,07, что слишком мало, чтобы можно было увидеть на графике фиг.26).
Можно также скорректировать вычисленный массовый расход для отказавшего измерительного преобразователя после его идентификации. Например, можно изменить форму расширенной матрицы Z посредством удаления строки, связанной с отказавшим измерительным преобразователем. Затем можно сформировать новую псевдообратную матрицу W путем обращения переформированной расширенной матрицы Z. После этого можно оценить массовый расход путем предварительного умножения вектора оценок Хе разности времени с уменьшенным размером, в котором обнулена строка, связанная с отказавшим измерительным преобразователем, на новую псевдообратную матрицу W. На фиг.27 показана такая коррекция для оценки массового расхода.
Согласно вариантам настоящего изобретения устройство расходомера может контролировать параметр отрезка, коэффициент корреляции, стандартную погрешность оценки или другую меру корреляции для определения состояния системы. Например, после обнаружения большого изменения параметра отрезка можно идентифицировать конкретный отказавший измерительный преобразователь и модоселективный фильтр и/или псевдообратную матрицу, используемую данным устройством для формирования оценок разности, можно пересчитать для компенсации отказавшего измерительного преобразователя. Аналогично можно использовать погрешность оценки разности времени, связанную с конкретными измерительными преобразователями, выходящую за пределы стандартной погрешности оценки, для обнаружения отказа измерительного преобразователя и запуска операции коррекции.
На фиг.28 проиллюстрированы операции 2800 для определения состояния системы согласно вариантам реализации настоящего изобретения. Формируется множество оценок разности, например вектор Хе оценок разности времени, описанный выше (блок 2810). Определяется мера корреляции, например параметр отрезка, коэффициент корреляции или погрешность оценки (блок 2820). Из определенной меры корреляции определяется состояние системы (блок 2830).
На фиг.29 проиллюстрированы примерные операции 2900 согласно другим вариантам реализации настоящего изобретения. Формируется вектор Хе оценок разности (блок 2910). Определяется мера корреляции, например параметр отрезка, коэффициент корреляции или погрешность оценки (блок 2920). Если изменение меры корреляции отвечает заданному критерию, идентифицируется отказавший измерительный преобразователь (блоки 2930, 2940). После идентификации отказавшего измерительного преобразователя можно обнулить соответствующие элементы расширенной матрицы Z и можно пересчитать псевдообратную матрицу W для использования в последующих вычислениях массового расхода и других параметров (блоки 2950, 2960, 2910). Таким образом, ввод из отказавшего измерительного преобразователя можно исключить из последующих оценок массового расхода.
На основании меры корреляции можно предпринять и другие коррективные действия. Например, в примерных операциях 3000 согласно вариантам настоящего изобретения, проиллюстрированным на фиг.30, контролируется параметр отрезка (блок 3010) и, если изменение параметра отрезка отвечает заданному критерию, устройство может пересчитать модоселективный фильтр, используемый им для формирования оценок массового расхода (блоки 3020, 3030). Можно использовать целый ряд критериев изменения, например критерии на основе максимального отклонения параметра отрезка от исходного значения, среднего отклонения параметра отрезка в течение заданного интервала времени и т.п.
Специалистам будет понятно, что настоящее изобретение можно реализовать множеством различных способов, помимо описанных выше вариантов. Например, описанные вычисления можно осуществлять отдельно или объединить их в одно или несколько вычислений, дающих эквивалентные результаты. Описанные функции можно, в общем, реализовать с помощью методов обработки цифровых и/или аналоговых сигналов. Специалистам также будет понятно, что хотя настоящее изобретение можно реализовать в устройстве, например кориолисовом массовом расходомере, или в способах, осуществляемых таким устройством, его можно также реализовать в устройстве, выполненном с возможностью функционирования в связи с расходомером или датчиком, например в устройстве управления процессом. Также понятно, что настоящее изобретение можно реализовать в промышленном изделии в виде машиночитаемых команд или программного кода, записанного на машиночитаемой запоминающей среде, например магнитном диске, запоминающем устройстве на интегральных схемах, магнитной ленте, ЦМД-памяти или т.п. Такой компьютерный программный код может исполняться вычислительной машиной или другим процессором данных в ответ на сигналы движения, поступающие от измерительных преобразователей движения, функционально связанных с конструкцией, такой как трубка или другая емкость.
На чертежах и в описании были раскрыты типичные предпочтительные варианты реализации изобретения и, несмотря на применение специальных терминов, они имеют не ограничительный, а обобщенный и описательный смысл, и объем притязаний изобретения охарактеризован в следующей далее формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИАГНОСТИЧЕСКОЕ УСТРОЙСТВО И СПОСОБЫ ДИАГНОСТИКИ РАСХОДОМЕРА КОРИОЛИСА | 2003 |
|
RU2324150C2 |
| СПОСОБЫ И УСТРОЙСТВО, СООТВЕТСТВУЮЩИЕ ДАТЧИКАМ С АВТОМАТИЧЕСКИМ ОПРЕДЕЛЕНИЕМ ПАРАМЕТРОВ ВИБРИРУЮЩИХ ТРУБОПРОВОДОВ | 2000 |
|
RU2247331C2 |
| Способ вычисления текущей разности фаз и частоты сигналов кориолисовых расходомеров | 2017 |
|
RU2687803C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА МАТЕРИАЛА В МАССОВОМ РАСХОДОМЕРЕ КОРИОЛИСА | 1996 |
|
RU2155325C2 |
| Способ вычисления текущей разности фаз и частоты сигналов кориолисовых расходомеров (варианты) | 2019 |
|
RU2707576C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2476986C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483319C2 |
| Способ определения угла крена быстровращающегося летательного аппарата | 2024 |
|
RU2823718C1 |
| КОГЕРЕНТНОЕ СЛЕЖЕНИЕ ДЛЯ ЧМ-ПРИЕМНИКА СТАНДАРТА ВПР С ПОМОЩЬЮ АНТЕННОЙ СИСТЕМЫ С КОММУТАЦИОННЫМ РАЗНЕСЕНИЕМ | 2004 |
|
RU2373660C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2450470C1 |
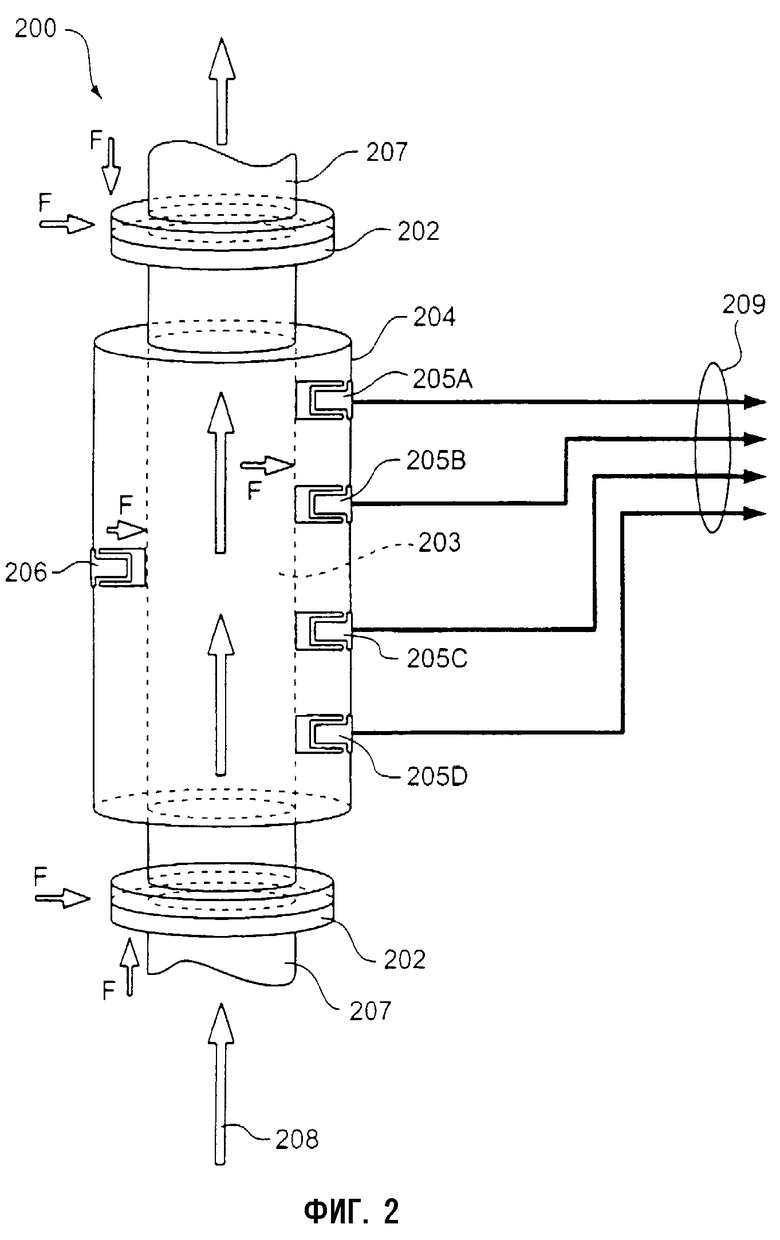

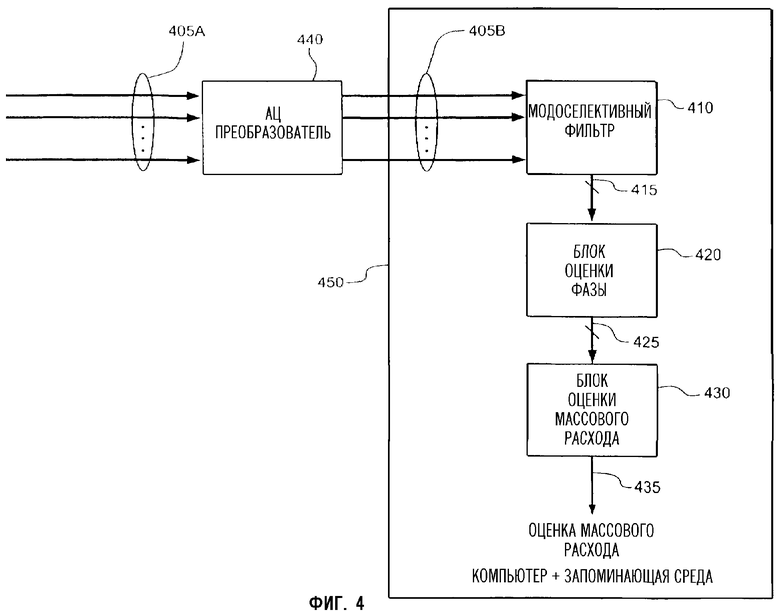
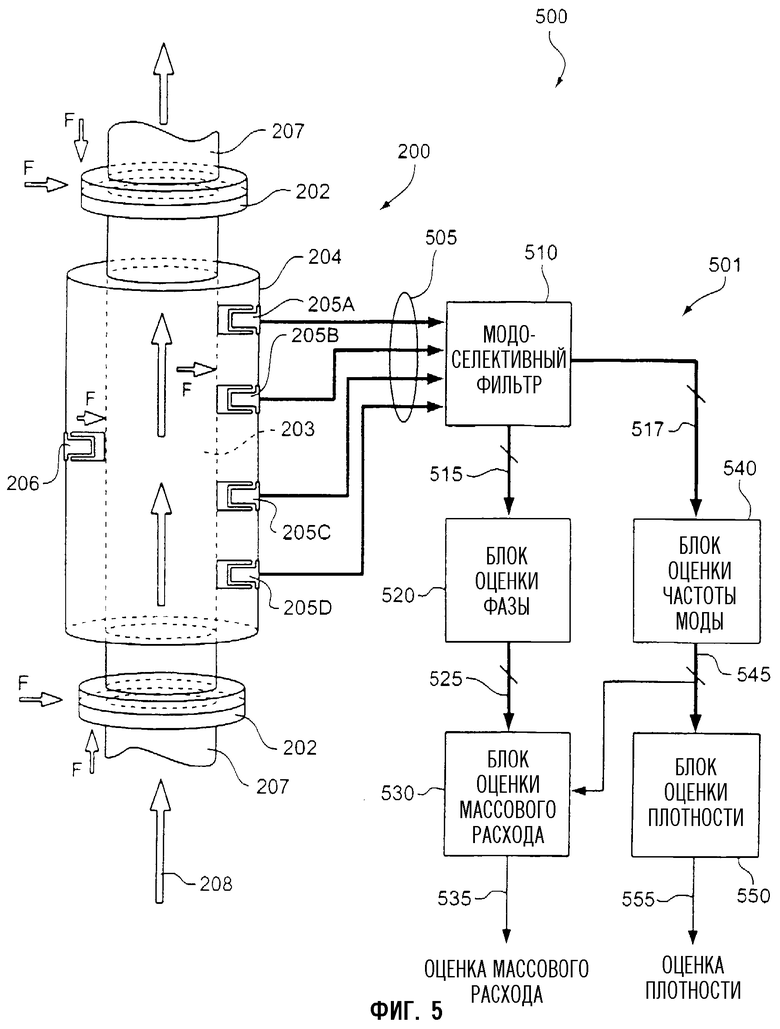


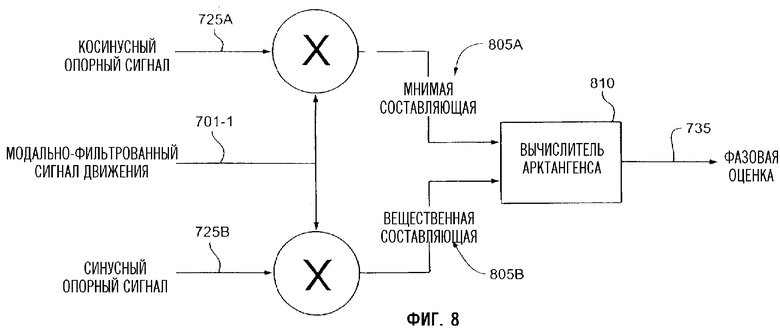
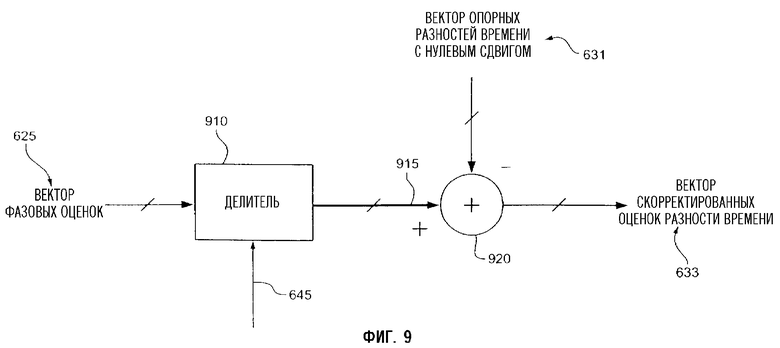



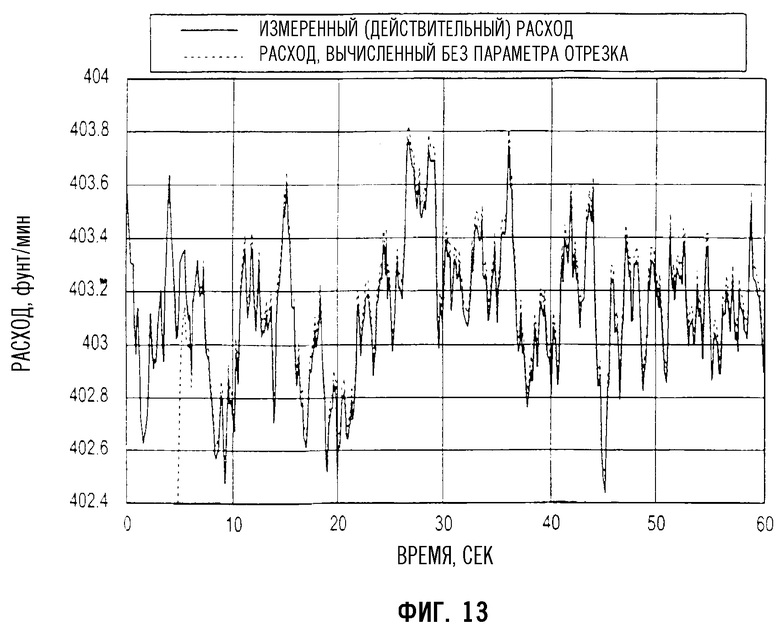



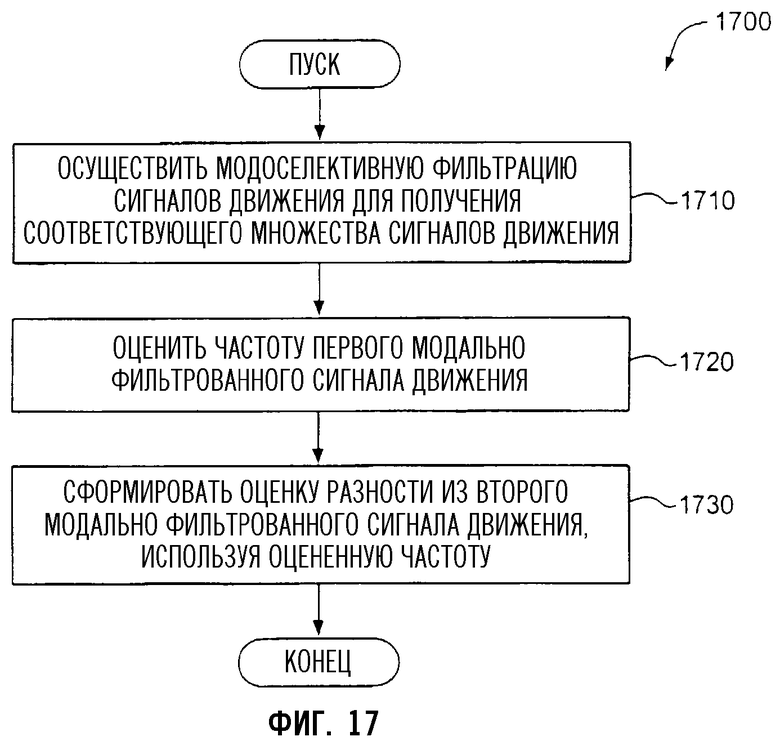

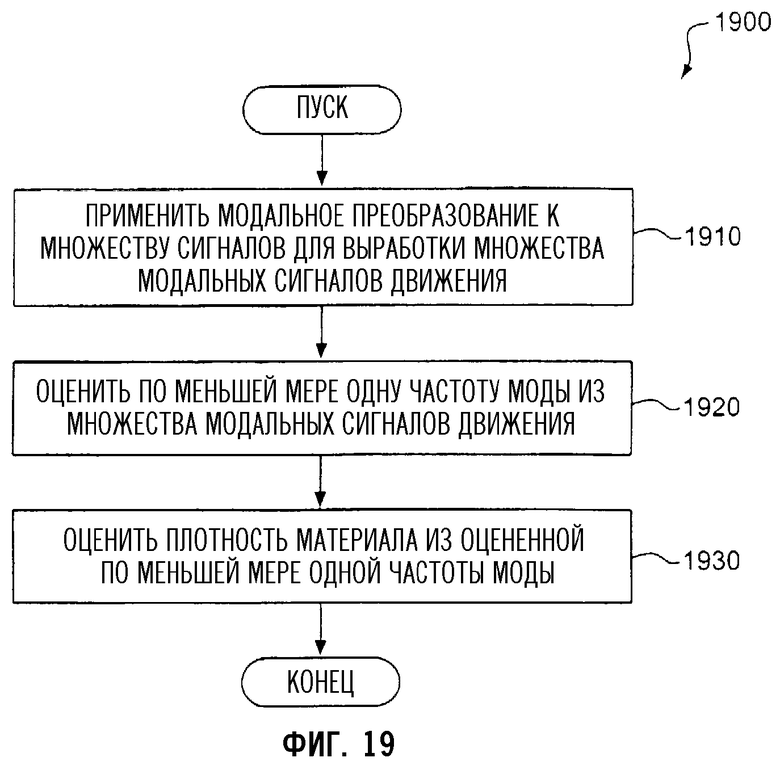



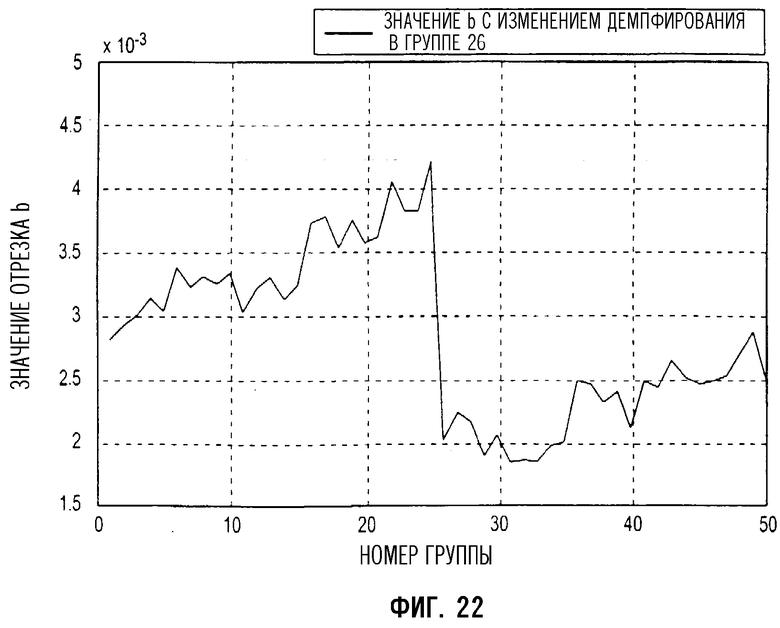



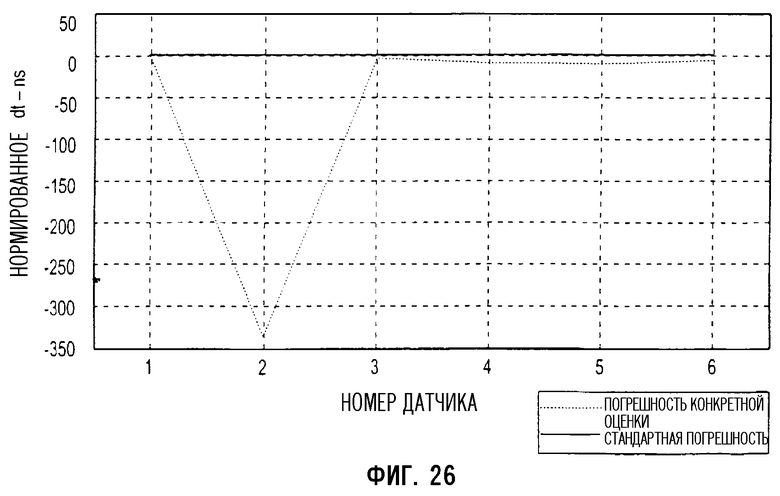

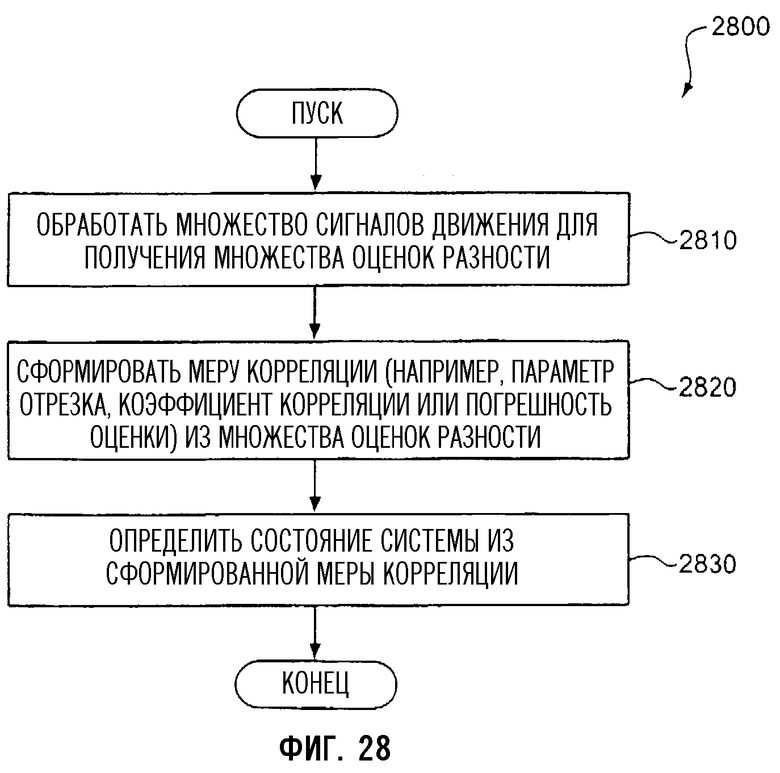
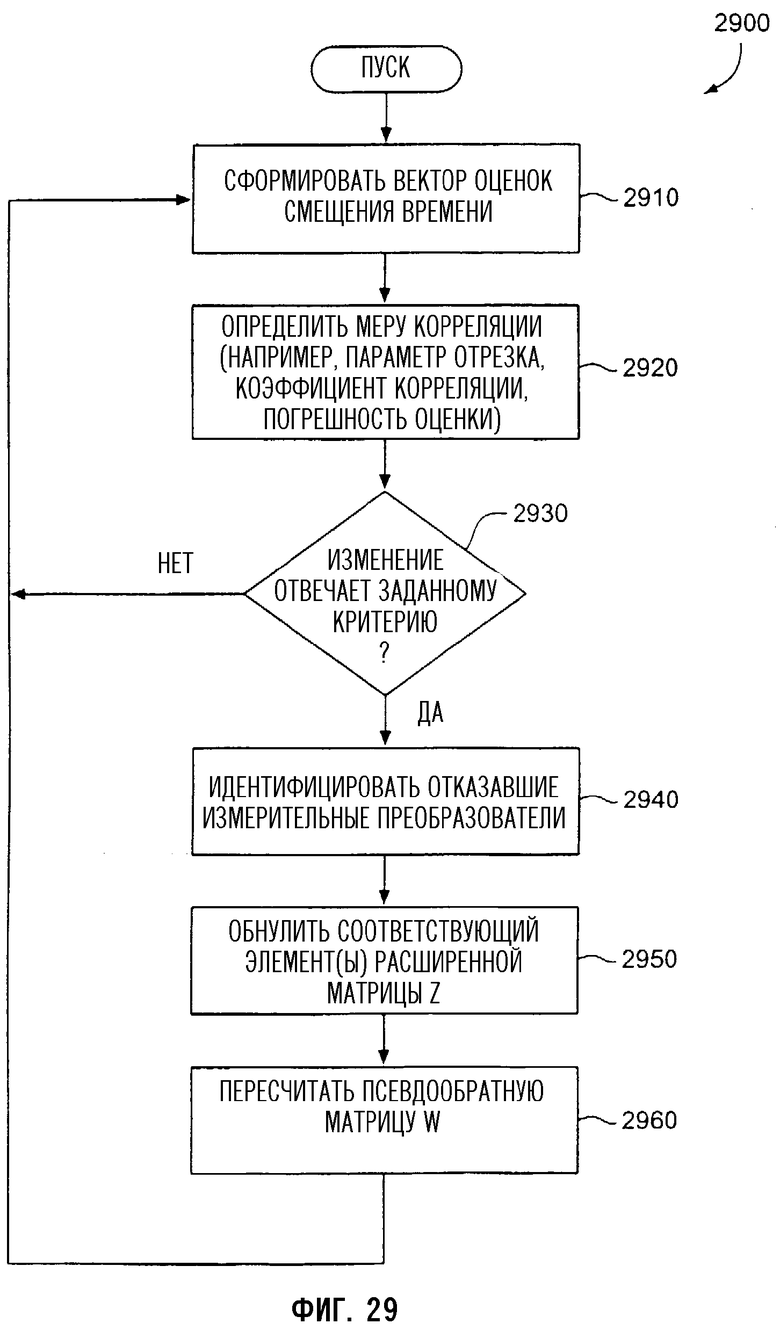
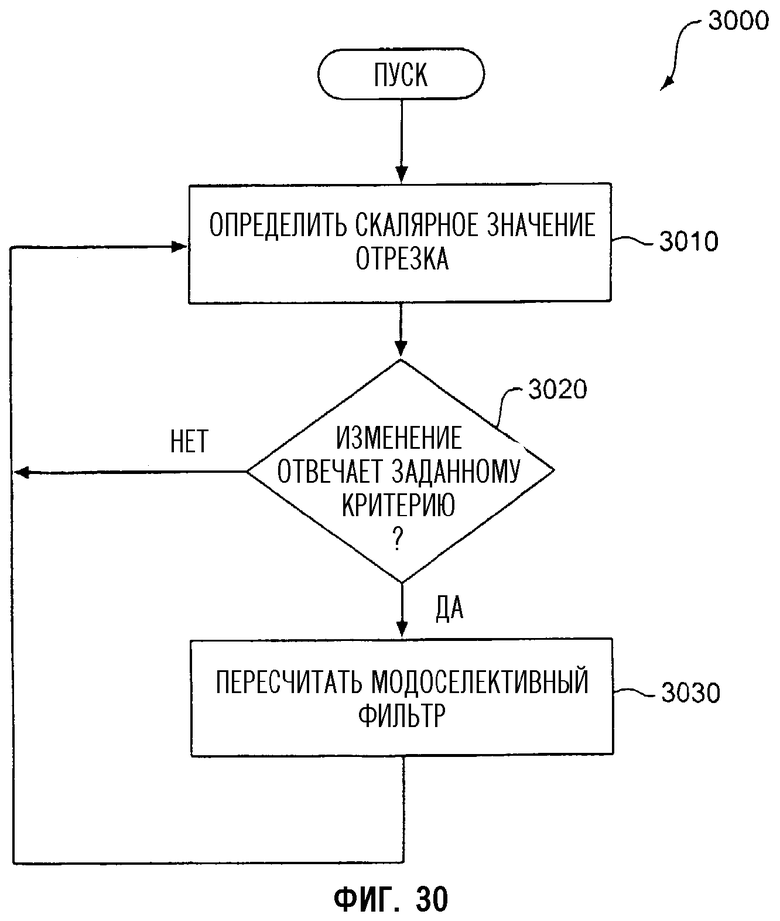
Изобретения предназначены для использования при измерении массового расхода. Из множества сигналов движения колеблющейся трубки, отфильтрованных методом модоселективной фильтрации, вырабатывают множество фазовых оценок. Оценивают частоту моды сигналов движения, посредством деления на которую множества фазовых оценок получают множество оценок разности времени. Полученные данные по разности времени используют для определения массового расхода. Изобретения обеспечивают повышение точности измерения за счет удаления нежелательных вибрационных составляющих колебательного движения трубки, близких к частоте возбуждения. 2 н. и 55 з.п. ф-лы, 30 ил.
| WO 00/08423 A1, 17.02.2000 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| WO 00/49371 A1, 24.08.2000 | |||
| WO 00/04345 A1, 27.01.2000 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ МЕХАНИЧЕСКОГО НУЛЯ КОРИОЛИСОВОГО ИЗМЕРИТЕЛЯ И КОРИОЛИСОВ ИЗМЕРИТЕЛЬ ДЛЯ ИЗМЕРЕНИЯ УДЕЛЬНОГО РАСХОДА ПРОТЕКАЮЩЕЙ ЧЕРЕЗ НЕГО ТЕКУЧЕЙ СРЕДЫ | 1992 |
|
RU2119149C1 |

