Изобретение относится к устройствам для приведения в действие колесных транспортных средств, в частности велосипедов, мускульной силой человека, воздействующего на педали, совершающие колебательные движения.
Приводы велосипедов и веломобилей, ведущие звенья которых движутся возвратно - поступательно или возвратно - вращательно, известны достаточно широко. Одним из их достоинств является возможность регулирования передаточного отношения за счет изменения длин звеньев механизма.
Известен, например, мускульный привод транспортного средства [а.с. СССР 1507639], содержащий рычаги с педалями, установленные на оси каретки. Каждый из рычагов с педалями снабжен дополнительным рычагом, жестко связанным с ним. В направляющей дополнительного рычага размещена зубчатая рейка, имеющая ухо для тяги, передающей движение через муфту свободного хода на ведомый вал ведущего колеса транспортного средства. Каждая рейка входит в зацепление с шестерней, ось которой закреплена на дополнительном рычаге. Шестерни связаны между собой и с вращающейся рукояткой, установленной на руле. Для изменения передаточного числа привода велосипедист посредством гибкого вала поворачивает шестерни и смещает рейки с закрепленными на них тягами относительно центра каретки, изменяя, тем самым, передаточное отношение привода.
Недостатком этого устройства является низкая надежность, связанная с наличием гибкого вала. Не имея достаточной крутильной жесткости, он запаздывает с передачей управляющего воздействия, не обеспечивает одинакового передаточного отношения в обеих педалях и быстро изнашивается. Кроме того, реечная передача не самотормозящая и требует дополнительного устройства для фиксации положения рейки, которое в описании не упомянуто.
Описанный выше принцип изменения передаточного отношения привода за счет варьирования длин ведущих рычагов, соединенных с педалями, использован и в других устройствах. Их общим недостатком является сложность механизма, передающего управляющее воздействие на два рычага одновременно, и низкая его надежность.
Существует другой принцип варьирования передаточного отношения привода от двух качающихся педалей. Он заключается во введении между педальными рычагами и тягой промежуточных звеньев, взаимодействующих со стойкой. При этом управляющим является параметр стойки, единый для двух педалей. В приводе, известном по а.с. №1326494, применен кулисный механизм изменения передаточного отношения. В нем педальные рычаги являются кулисами. Каждый из них связан поступательной парой с кулисным камнем (в а.с. №1326494 последний конструктивно выполнен в виде системы роликов), который шарнирно связан с дополнительным рычагом (в а.с. №1326494 это звено названо шатуном). Оси подвеса двух педальных рычагов на стойке, так же как оси подвеса двух дополнительных рычагов, общие. В приводе имеется устройство, которое позволяет изменять положение на стойке общей оси дополнительных рычагов и, тем самым, варьировать передаточное отношение привода в процессе движения транспортного средства.
Недостатком упомянутого и подобных ему устройств является наличие поступательной пары, которая в своем классическом исполнении вызывает большие потери на трение, а будучи заменена некоторой системой тел качения (как в а.с. №1326494) приводит к неоправданному усложнению конструкции механизма.
Наиболее близким предлагаемому по конструкции является мускульный привод транспортного средства (а.с. №785104), основанный на использовании шарнирных четырехзвенников, а именно двухкоромысловых механизмов. Этот привод содержит педальные рычаги (ведущие коромысла), каждый из которых шарнирно связан с тягами (шатунами), соединенными с качающимися звеньями (ведомыми коромыслами), шарниры которых закреплены на раме транспортного средства, механизм преобразования колебательного движения во вращательное, выполненный в виде двух звездочек с муфтами свободного хода, размещенных на валу, и поддерживающей звездочки, закрепленной на раме, и цепь, закрепленную своими концами на ведомых коромыслах и охватывающую звездочки.
Конструкция привода позволяет регулирование положения оси подвеса ведомых коромысел на стойках, но не в процессе движения транспортного средства. Достоинством двухкоромыслового механизма по сравнению с кулисным является отсутствие поступательных пар.
Недостатки приведенной конструкции:
невозможность производить варьирование передаточного отношения привода в процессе движения;
соотношение длин звеньев механизма и расположение направляющей стойки, по которой возможно производить установочное перемещение оси подвеса коромысла, таково, что при осуществлении этого перемещения не столько меняется передаточное отношение, сколько расстояние педалей до земли, т.е. варьирование передаточного отношения в достаточно широком диапозоне невозможно.
Для устранения указанных недостатков в мускульный привод транспортного средства, содержащий два двухкоромысловых механизма, включающих общую стойку (раму), ведущее и ведомое коромысла и шатун, на ведущих коромыслах которых закреплены педали, а к ведомым коромыслам присоеденены тяги, связывающие их с мехамизмами свободного хода, установленными на ведомом валу, причем ось подвеса обоих ведомых коромысел является общей и зафиксирована на раме с возможностью установочного перемещения (т.е. регулирования длины стойки), предлагается ввести следующие отличительное свойство: управление передаточным числом привода обеспечено посредством устройства изменения длины стойки с возможностью ее регулирования в процессе движения транспортного средства.
Предлагаемая кинематическая схема эффективно работает в двух областях параметров:
1) когда длина стойки во всем диапазоне ее регулирования больше длины ведомого коромысла,
2) когда длина стойки во всем диапазоне ее регулирования остается меньше длины ведомого коромысла. При этом сами ведомые коромысла конструктивно выполнены С-образными и охватывают ось подвеса ведущих коромысел.
В компоновках с горизонтальным расположением ведущих коромысел с педалями, характерных для велосипедов, первый случай сочетается с расположением ведомого коромысла выше оси подвеса ведущего коромысла, а второй - с нижним расположением оси подвеса ведомого коромысла.
Устройство изменения длины стойки включает регулировочное звено (ползун или коромысло), на котором закреплены оси шарниров подвеса ведомых коромысел, и фиксатор положения этого звена.
Для повышения удобства управления передаточным числом привода устройство изменения длины стойки содержит пружину, поджимающую регулировочное звено в направлении, соответствующем увеличению амплитуды качаний ведомых коромысел, а фиксатор положения регулировочного звена связан (например, гибким тросом) с управляющим элементом (рычагом, кнопкой), закрепленным в удобном месте (например, на руле велосипеда).
Для обеспечения бесступенчатого варьирования передаточного числа привода в устройстве изменения длины стойки регулировочное звено выполнено в виде эксцентрика, внешняя окружность которого взаимодействует с упорами стойки, разнесенными по этой окружности друг относительно друга на угол 180°-(15°...35°), а ось подвеса коромысел смещена относительно центра указанной окружности на величину 0,3...0,7 ее радиуса.
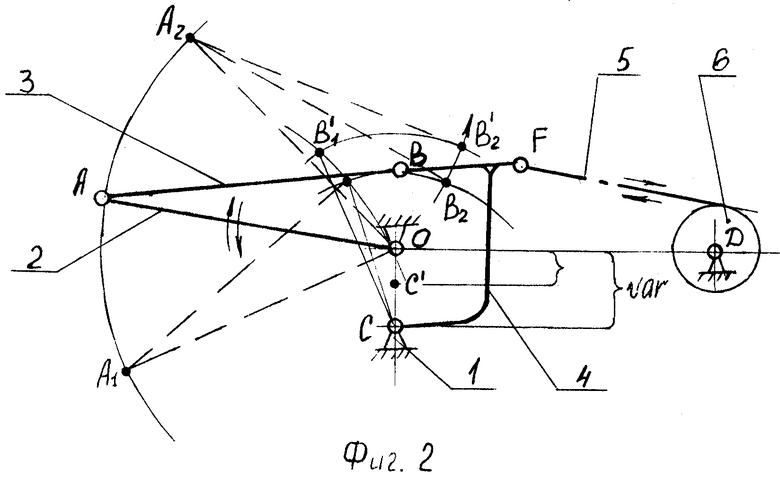
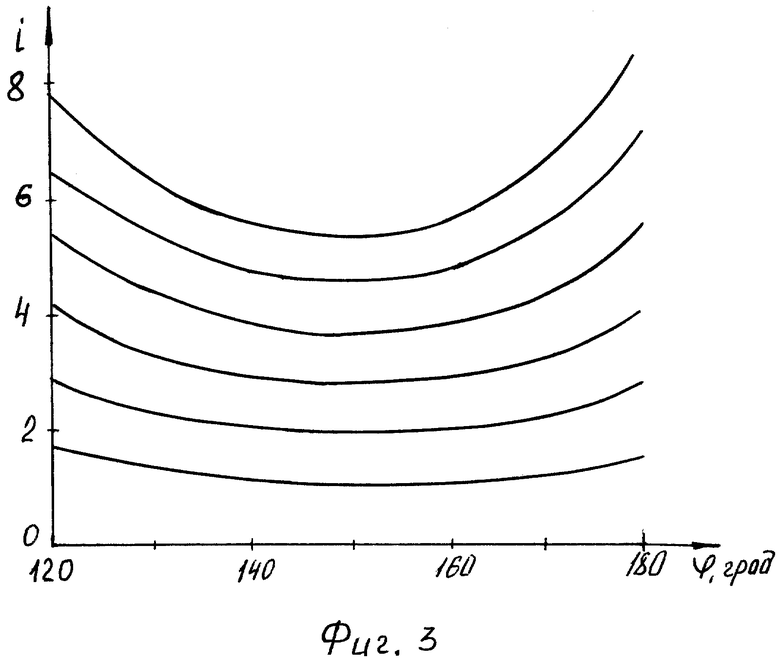
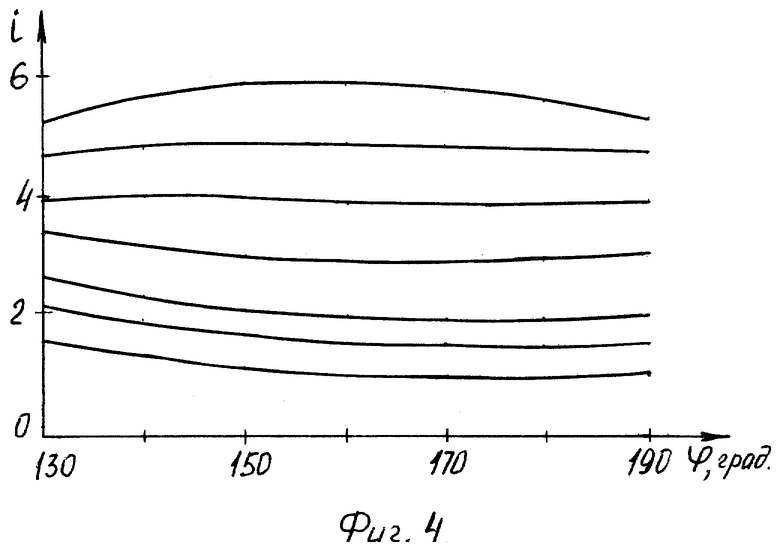
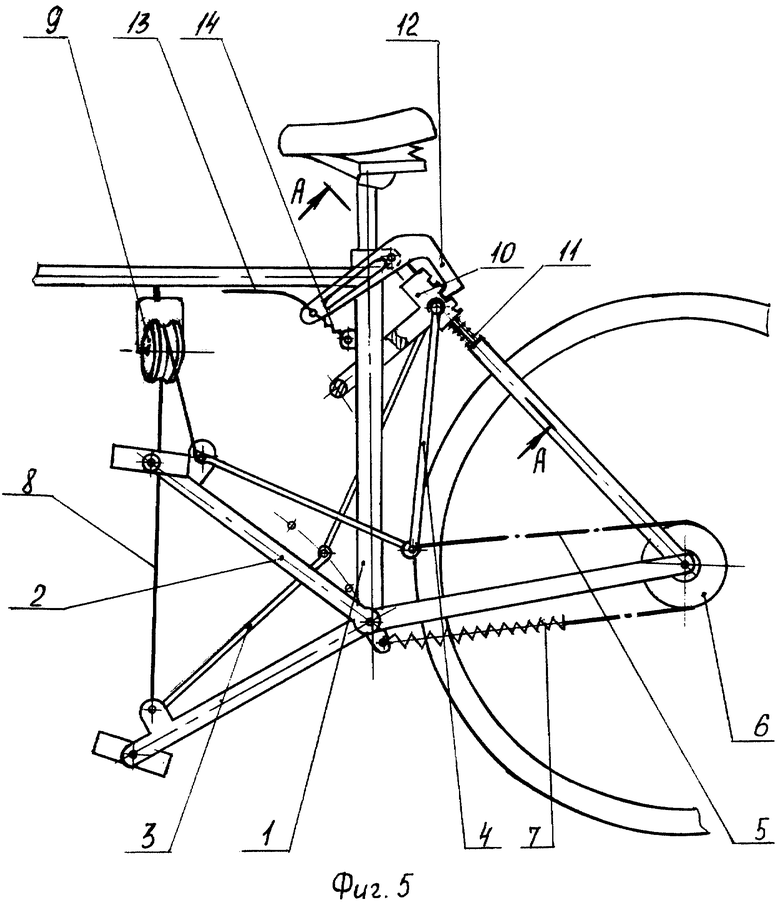
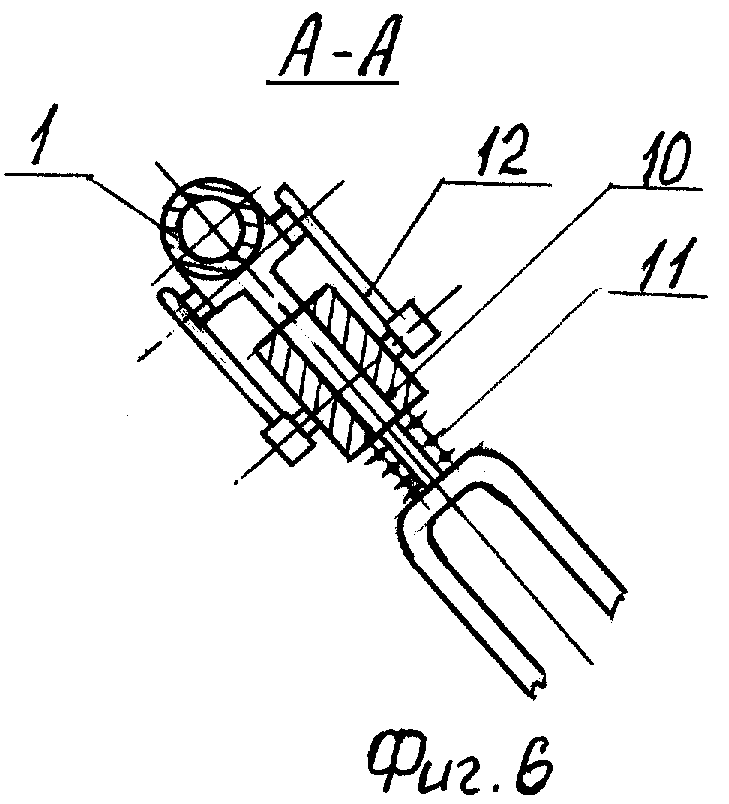
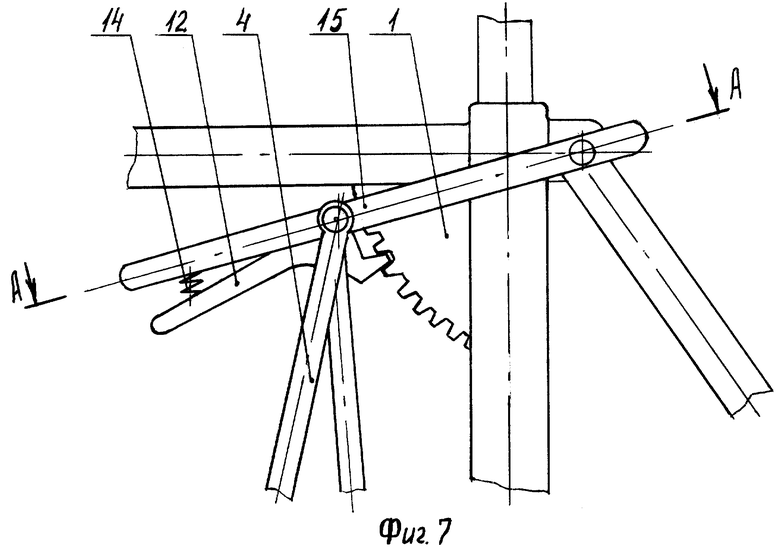
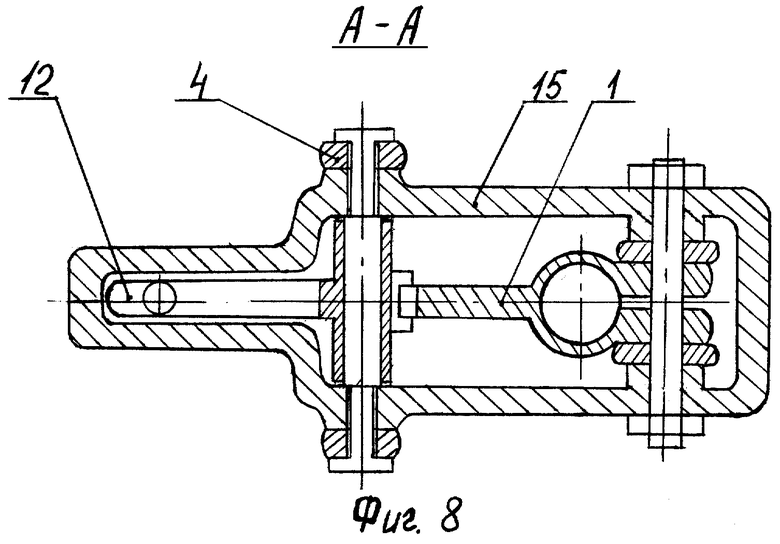
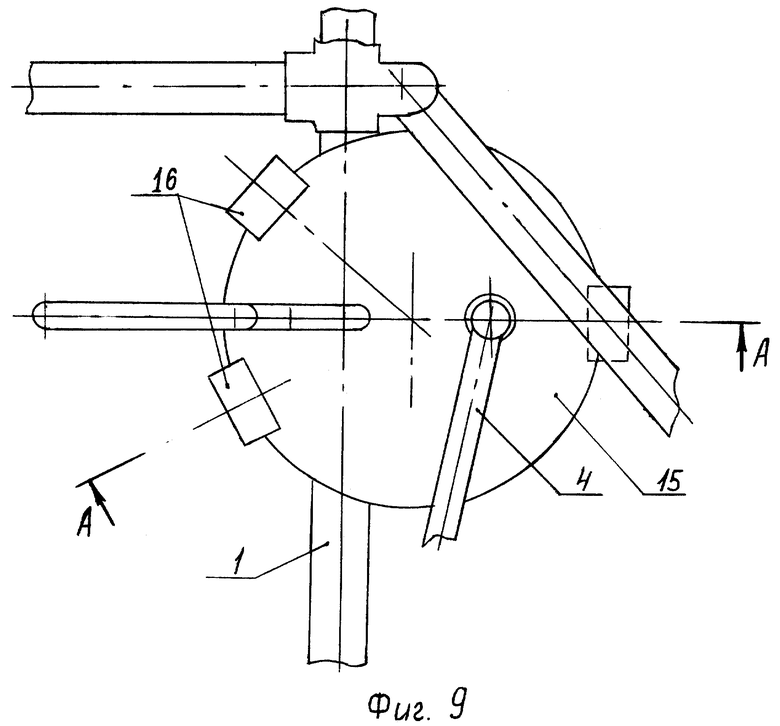
На фиг.1 показана кинематическая схема двухкоромыслового механизма с верхним расположением ведомого коромысла. На фиг.2 - схема с нижним расположением оси подвеса ведомого коромысла. Фиг.3 - семейство кривых, передаточной функции механизма привода с верхним расположением ведомого коромысла. Фиг.4 - семейство кривых, передаточной функции для случая нижнего расположения точки подвеса ведомого коромысла. Фиг.5 - пример конструктивной реализации схемы с верхним расположением ведомого коромысла в приводе велосипеда. Фиг.6 - его разрез по А-А. Фиг.7 - устройство изменения длины стойки с зубчатым фиксатором. Фиг.8 - его разрез по А-А. Фиг.9 - устройство изменения длины стойки самотормозящего типа. Фиг.10 - его разрез по А-А. Фиг.11 - конструкция привода с нижним расположением оси подвеса ведомого коромысла. Фиг.12 - его разрез по Б-Б. Фиг.13 - его разрез по В-В.
Двухкоромысловый механизм с верхним расположением ведомого коромысла, схема которого показана на фиг.1, содержит стойку 1, ведущее коромысло 2, шатун 3, ведомое коромысло 4, тягу 5, механизм свободного хода (МСХ) 6.
Работа этого механизма происходит следующим образом. Коромысло 2 совершает возвратно - вращательные движения постоянной амплитуды, а его точка А переходит из положения А1 в положение А2. При этом принадлежащая ведомому коромыслу 4 точка В перемещается из положения B1 в положение В2, расстояние между которыми соответствует данному положению точки С на стойке. Смещение точки С в положение С’ проводит к изменению длины хорды B1B2-B1’B2’. Соответственно изменяется и ход тяги 5, приводящей в движение МСХ 6, а следовательно, и угол поворота ведомого вала.
Отношение угловых скоростей ведущего и ведомого звеньев i26=ω2/ω6 в зависимости от угла ϕ поворота звена 2 при различных положениях точки С показано на фиг.3. Чем ниже опускается точка С, тем меньше i26. Коэффициент Кi варьирования средних за цикл значений i26 даже превышает требующуюся для велосипеда величину Кi=3. Отклонение мгновенного значения i26(ϕ) от среднего в рабочем диапозоне угла ϕ в 60° не превышает ±10°.
Механизм, схема которого показана на фиг.2, имеет те же звенья. Отличия в том, что точка С подвеса ведомого коромысла 4 лежит ниже оси О подвеса ведущего коромысла 2, а длина стойки ОС всегда меньше длины коромысла СВ.
Кроме того, тяга 5 закреплена на коромысле 4 не в точке В, а в другой произвольной точке F. Для того чтобы все звенья могли располагаться и двигаться в одной плоскости, звено 4 выполнено С- образным. Работа механизма подобна предыдущей. Однако можно заметить, что кривые i26(ϕ), показанные на фиг.4, более пологие. При прочих равных показателях эта схема дает меньшее отклонение мгновенного i26 от среднего, чем предыдущая (не выше ±3%).
Пример конструктивного оформления схемы с верхним расположением ведомого коромысла в приводе велосипеда показан на фиг.3 и 6. Помимо звеньев 1-6, упомянутых выше, устройство содержит пружину 7, образующую вместе с (МСХ) 6 и тягой 5, которая в данном случае является цепью, известную систему “цепь Гали”, обеспечивающую постоянное натяжение цепи. Для синхронизации движения и возврата педалей в исходное положение служит трос 8, перекинутый через блок 9.
Устройство изменения длины стойки во время движения содержит регулировочное звено - ползун 10, пружину 11, фиксатор 12, гибкий трос 13, связывающий фиксатор с рычагом на руле (на фигуре не показан), и пружину 14 фиксатора. Ползун 10 несет ось ведомых коромысел 4 и охватывает раму 1 с целью предотвращения проворота.
Устройство изменения длины стойки работает следующим образом. Для уменьшения передаточного отношения в активной фазе работы МСХ велосипедист с усилием нажимает на ту педаль, которая в данный момент находится ниже и освобождает фиксатор 12 (с помощью троса 13). Преодолевая усилие пружины 11, ползун 10 опускается вниз, уменьшая, тем самым, длину стойки. Велосипедист ослабляет трос 13, под действием пружины 14 фиксатор 12 возвращается на место и фиксирует ползун 10 в новом положении.
Для увеличения передаточного отношения велосипедист освобождает фиксатор 12, не нажимая на педали. Под действием пружины 11 ползун 10 поднимается вверх, увеличивая длину стойки.
На фиг.7, 8 показано более простое устройство изменения длины стойки. В нем регулировочное звено выполнено в виде коромысла 15. Велосипедист рукой нажимает на фиксатор 12 и переводит коромысло 15 в нужное положение, не нажимая на педали.
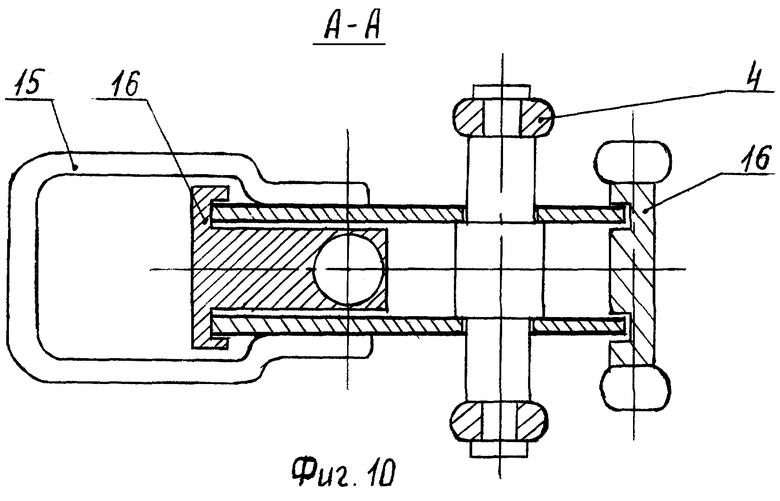
В устройстве, изображенном на фигурах 9, 10, регулировочное коромысло 15 выполнено в виде эксцентрика и установлено между упорами 16 стойки 1, разнесенными между собой по внешней окружности эксцентрика на угол 180°-(15°...35°), обеспечивающий самоторможение этого соединения под действием сил, приложенных к регулировочному коромыслу 15 со стороны ведомого коромысла 4. Ось С подвеса ведомого коромысла 4 смещена относительно центра указанной окружности на расстояние, меньшее ее радиуса, что дополнительно усиливает эффект самоторможения. Это устройство обеспечивает бесступенчатое изменение длины стойки.
Для изменения передаточного отношения привода достаточно, не нажимая на педали, перевести регулировочное коромысло 15 в нужное положение.
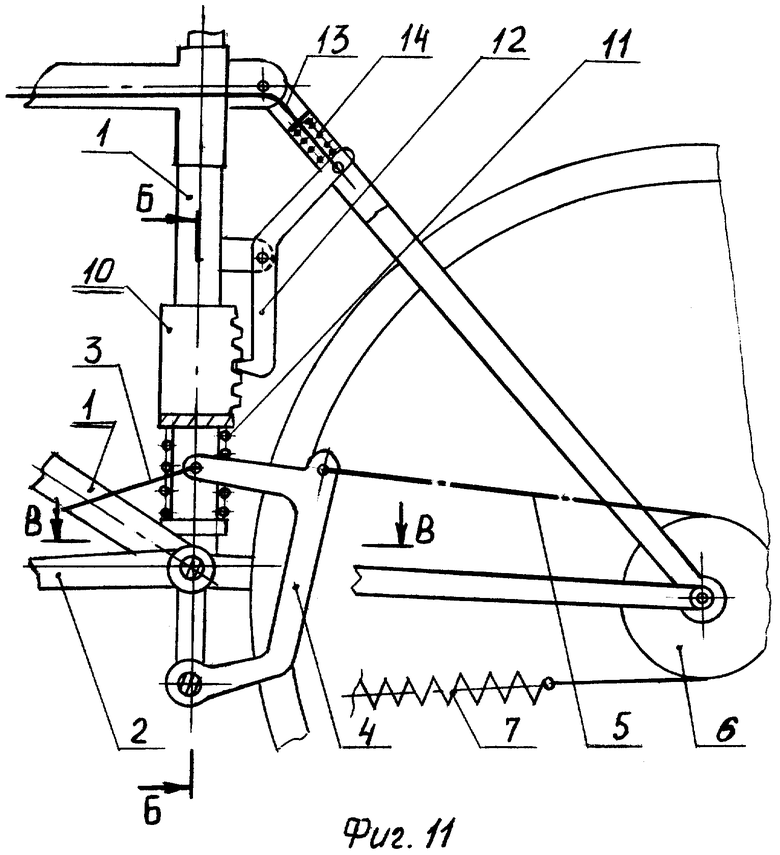
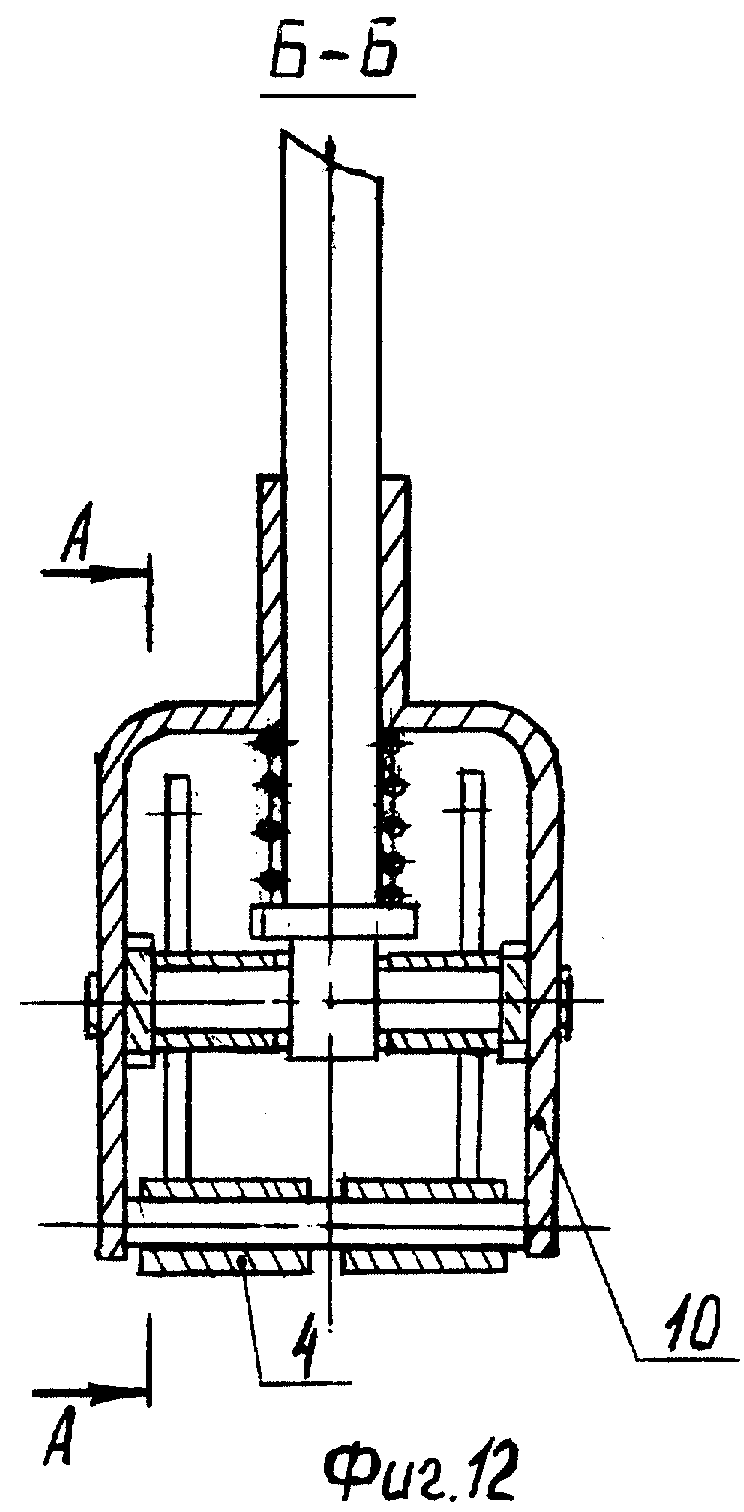
На фиг.11, 12, 13 показан пример выполнения привода с нижним расположением точки подвеса ведомого коромысла 4.
Регулировочное звено - ползун 10 имеет свободу вертикального установочного перемещения относительно рамы 1. Работа устройства происходит аналогично устройству, изображенному на фиг.5.
Предложенный мускульный привод допускает изменение передаточного отношения i не менее чем в три раза. Регулирование i можно выполнять в процессе движения велосипеда. Устройство изменения i обладает высокой надежностью и не снижает КПД привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| ПРИВОД ПЕДАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2525185C2 |
| ТАНДЕМ А.Г. ДВОРЯНИДОВА | 2003 |
|
RU2247051C1 |
| ПРИВОД ВЕДУЩЕГО КОЛЕСА ДОРОЖНО-ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2739643C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| ВЕЛОСИПЕД С ЭРГОНОМИЧНЫМИ ПОСАДКОЙ И ПЕДАЛИРОВАНИЕМ | 2019 |
|
RU2724027C1 |
| Транспортное средство,приводимое в действие мускульной силой человека | 1986 |
|
SU1371940A1 |
| ВЕЛОСИПЕД И РЫЧАЖНО-ХРАПОВОЙ МЕХАНИЗМ | 1999 |
|
RU2155141C1 |

Изобретение относится к приводам с возвратно-поступательными рычагами. Ведущее (2) и ведомое (4) коромысла соединяет шатун (3). На ведущих коромыслах (2) закреплены педали, а к ведомым коромыслам (4) присоединены тяги, связывающие их с механизмами (6) свободного хода. Ведомые коромысла (4) могут быть подвешены на ползуне (10), коромысле или эксцентрике для изменения передаточного числа привода в процессе движения транспортного средства. Предлагаемое техническое решение направлено на расширение диапазона изменения передаточного числа в приводах с возвратно-поступательными рычагами. 5 з.п. ф-лы, 13 ил.

| Мускульный привод транспортного средства | 1979 |
|
SU785104A1 |
| УКЛАДЧИК ПРОВОЛОЧНОГО НОСИТЕЛЯ МАГНИТНОЙ ЗАПИСИ | 0 |
|
SU191847A1 |
| Мускульный привод транспортного средства | 1985 |
|
SU1326494A1 |

