Изобретение относится к дистанционному контролю места расположения и управлению перемещениями наблюдателя, выполнению целераспределения и назначению зон ответственности, съему координат наблюдаемого объекта и выполнению соответствующих воздействий на наблюдаемый на местности объект.
Известно (см., напр., патент США №5824942) средство для управления стрельбой по навесным траекториям из ручного огнестрельного оружия с использованием лазерного дальномера, цифрового компаса, вычислителя и индикатора. Недостатками технического решения являются ограниченность применения данного средства, способного измерять расстояние до объекта, но не азимут и угол места цели. Кроме того, в данном случае отсутствует возможность дополнительной дистанционной ориентации наблюдателя или бойца относительно цели, например, при смещении цели или бойца.
Наиболее близким к предложенному техническому решению является средство ориентирования на местности (патент РФ №2247921 от 26.06.2002 г.). С помощью указанного средства определяют собственные координаты наблюдателя, сканируют местность с фиксацией показаний датчиков азимута и угла места, а направление на распределенную для наблюдателя цель передают в виде разностного сигнала по данным, исходящим от наблюдателя, которые обозначаются на цифровой модели рельефа местности, и данными базы целераспределения. Недостатками указанного технического решения являются невозможность использования данного оборудования для определения координат объектов, не находящихся на цифровой модели рельефа местности, в частности любых внезапно появляющихся искусственных объектов - от вертолетов и других медленно перемещающихся в непосредственной близости от поверхности транспортных средств до временных сооружений и знаков разрывов. Кроме того, в этом устройстве не предусмотрен совмещенный с обычным индивидуальным стрелковым оружием, например автоматом, простой удобный индикатор для корректировки направления движения бойца или наблюдателя к цели.
Задачей изобретения является обеспечение возможности съема координат целей и удаленных объектов с учетом дистанционного корректирования перемещений каждого бойца-наблюдателя в ходе операции при изменении положения как его самого, так и объектов противника, а также возможности определять координаты цели и получать информацию о границах индивидуальных зон ответственности с помощью оборудования, совмещенного с обычным оружием и не требующего действий оператора, внешне отличных от приемов применения этого оружия.
Техническим результатом изобретения является совмещение с индивидуальным стрелковым оружием, например автоматом, оборудования, способного совместно со штатным и вновь разрабатываемыми прицелами сканировать местность в обычном оптическом диапазоне, ночном и тепловизионном, определять координаты объектов наиболее эффективно - с использованием как цифровой модели рельефа местности, так и с помощью лазерного дальномера, тем самым обеспечивая для каждого бойца-наблюдателя возможность выдавать целеуказание и обеспечивать корректировку стрельбы, а также получать команды на изменения границ зон ответственности и корректировку направления собственного перемещения к новому месту расположения, часто находящемуся вне его пределов видимости.
Для достижения технического результата в способе контролируемого ориентирования на местности, заключающемся в фиксации показаний устройства определения собственных координат бойца-наблюдателя, сканировании местности с фиксацией показаний датчиков азимута и угла места на положении цели в поле зрения бойца-наблюдателя или на направлении на распределенную для бойца-наблюдателя цель в виде разностного сигнала между данными из базы данных для целераспределения и положением стрелкового оружия бойца-наблюдателя, которые обозначаются на цифровой модели рельефа местности, точки, определяющие цель на цифровой модели рельефа местности, образуются на пересечении с ней линии прицеливания индивидуального стрелкового оружия, фиксированной при сканировании местности при расположении цели на поверхности земли или распределяются как ортогональная проекция с учетом дальности, измеренной посредством встроенного лазерного дальномера при размещении цели над поверхностью земли, направление движения к цели в ходе взаимного перемещения цели и бойца-наблюдателя корректируют по разнице в свечении или ином изменении вида элементов индикатора-указателя азимутального поворота, кроме того, на дисплее, размещенном на корпусе дальномера, с группового устройства управления и вычислений производят формирование и передачу взаимного расположения бойцов-наблюдателей, а также цели или целей с учетом текущих изменений в их расположении, а также границ зон ответственности, и боец-наблюдатель непрерывно в ходе операции по плану на дисплее и по показаниям указателя-индикатора азимутального поворота определяет направление поворота автомата и момент совпадения линии визирования с направлением на цель или границу зоны ответственности, осуществляет выбор типа цели при визуальном контакте с ней, а также по командно-сигнальной информации, передаваемой по радиосвязи.
Технический результат достигается также тем, что в устройство для контролируемого ориентирования на местности, содержащее устройство сканирования местности, устройство определения собственных координат наблюдателя с навигационной аппаратурой, индикатор-указатель азимутального поворота, датчик азимута, датчик угла места, связанные с индивидуальным устройством управления, которое подключено к индивидуальному приемопередатчику, связанному с групповым приемопередатчиком, соединенным с групповым устройством управления и вычислений, которое содержит блок памяти с цифровой моделью рельефа местности и базой данных целераспределения, дополнительно введены устройство для определения вертикали, дисплей, лазерный дальномер, соединенный с дисплеем, и все указанные устройства и датчики размещены на индивидуальном стрелковом оружии, например автомате, таким образом, что управляющие и электронные блоки в виде устройства определения собственных координат наблюдателя, индивидуального устройства управления, индивидуального приемопередатчика вмонтированы в приклад автомата, а индикатор-указатель азимутального поворота, датчики азимута и угла места, устройство определения вертикали, лазерный дальномер, дисплей, соединенные с индивидуальным устройством управления, вынесены и закреплены на ствольной части автомата.
Дисплей, лазерный дальномер, датчики азимута, угла места, устройство определения вертикали закреплены в подствольной части автомата, а индикатор-указатель азимутального поворота размещен в надствольной части автомата.
Кроме того, индикатор-указатель азимутального поворота выполнен в виде, по меньшей мере, двух светящихся элементов, которые расположены сверху и по обе стороны ствола автомата с возможностью управления интенсивностью свечения каждого элемента индикатора.
Кроме того, в качестве устройства сканирования местности использованы прицел автомата или лазерный дальномер.
Таким образом, предложенное техническое решение означает появление нового предназначения стрелкового оружия, переводящего бойца-наблюдателя в иное качество - корректировщика средств огневой поддержки, пользующегося не только средствами поражения, но и собственными средствами наблюдения и ориентирования, заранее подготовленными базами данных по местности и обновляемыми данными, поставляемыми в базу данных всеми бойцами-наблюдателями, участвующими в операции, и средствами разведки, не входящими в состав подразделения бойцов-наблюдателей, что объединяет их в едином информационном пространстве. При этом появляется возможность пользоваться для определения дальности цели по выбору - как цифровой моделью рельефа местности, так и лазерным дальномером в любое время суток, благодаря применению ночных и тепловизионных приборов, а также облегчить бойцу-наблюдателю оперативное изменение задания, в частности передвижение к цели, находящейся за пределами прямой видимости бойца-наблюдателя, по разнице, например, в свечении вынесенных в зону прямой видимости бойца-наблюдателя на верхнюю плоскость ствола автомата элементов индикатора-указателя азимутального поворота, в соответствии с показаниями которого боец-наблюдатель может смещаться при движении в ту или иную сторону или получать информацию о границе зон ответственности. При этом боец-наблюдатель может использовать как схему взаимного расположения бойцов-наблюдателей группы и целей, так и указания или команды, передаваемые по радиосвязи с центрального поста.
Благодаря этому, помимо прочего, появляется возможность существенно повысить функциональность применения индивидуального стрелкового оружия, повысить эффективность целеуказания и применения огневой поддержки, снизить потери в живой силе, а также уменьшить время поражения. Это достигается за счет применения для поражения цели не только стрелкового оружия конкретного бойца, а всей огневой мощи приданного подразделения.
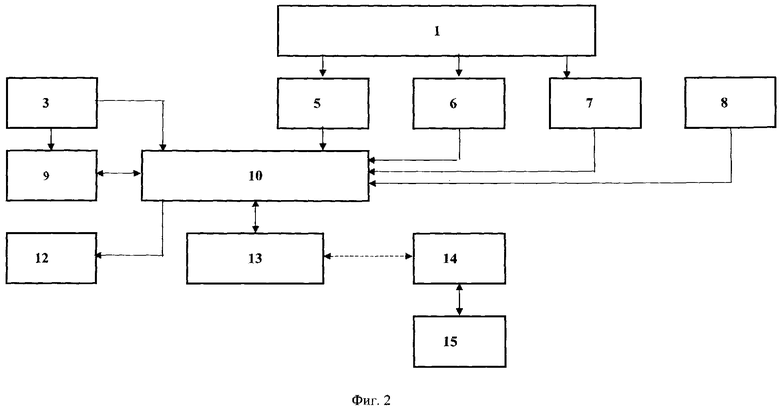
На фиг.1 в схематичном виде (вид сбоку в разрезе) показан автомат с вмонтированным в него оборудованием и приборами наблюдения, контроля, связи и управления.
На фиг.2 показана блок-схема устройства контролируемого ориентирования на местности бойца-наблюдателя.
Устройство содержит индивидуальное оборудование, включающее устройство сканирования местности 1 в виде прицела автомата 2, лазерный дальномер 3, закрепленный под стволом 4 автомата 2 или совмещенный с прицелом 1. Прицел 1 может быть сменным для дневного и ночного времени или быть тепловизионным, а также иметь индикатор изображения измеряемого объекта, индикатор дальности, устройство ввода признака цели (на фиг. не показаны). На нижней части ствола 4 автомата 2 (фиг.1) закреплены датчик азимута 5, датчик угла места 6 и устройство определения вертикали 7 в виде акселерометра. Датчики 5, 6, устройство 7 механически скреплены и съюстированы с прицелом 1 и лазерным дальномером 3 и совпадают с линией визирования. Устройство сканирования 1 связано с датчиками 5, 6 и устройством 7. Датчик 5 размещен на нижней части ствола. Датчики 6 и 7 компактно размещены в корпусе дальномера 3. Через прицел 1 линия визирования совмещается с целью и датчики 5 и 6 соответственно фиксируют азимут и угол места цели, причем собственные координаты наблюдателя определяет устройство определения собственных координат 8 в виде спутниковой навигационной системы, а устройство определения вертикали 7 позволяет уточнить азимут и угол места линии визирования индивидуального стрелкового оружия. На дальномере 3 размещен минидисплей 9, на котором индицируется изображение в поле зрения дальномера 3, имеется пульт для выбора типа цели и формирования команды или сообщения и показывается план взаимного расположения целей и бойцов-наблюдателей. Вход дисплея 9 соединен с выходом лазерного дальномера 3.
Лазерный дальномер 3, датчик азимута 5, датчик угла места 6, устройство определения вертикали 7, спутниковая навигационная система 8, дисплей 9 наблюдателя соединены с индивидуальным устройством управления 10 (фиг.2), размещенным в полости приклада 11 автомата 2 (фиг.1), где также размещена спутниковая навигационная система 8 и приемопередатчик 13. Индивидуальное устройство управления 10 своим выходом подключено к входу индикатора-указателя азимутального поворота 12, который выполнен, в виде двух элементов с регулируемой интенсивностью и цветом свечения, расположенных с разных сторон ствола 4 автомата 2 в одной плоскости. Индивидуальное устройство управления 10 своим входом-выходом соединено с индивидуальным приемопередатчиком 13. Приемопередатчик 13 имеет канал связи с групповым приемопередатчиком 14, который своим выходом-входом соединен с групповым устройством управления и вычислений 15. (Фиг.2).
Устройство для контролируемого ориентирования на местности работает следующим образом.
В устройстве управления и вычислений 15 группового оборудования разворачивают план местности, цифровую карту или цифровую модель рельефа местности, на которую наносят данные о местах расположения наблюдателей, получаемые от индивидуального устройства управления 10, соединенного со спутниковой навигационной системой 8, через приемопередатчики 13 и 14, и устройством определения целей из базы данных для целераспределения устройства управления и вычислений 15 группового оборудования, которое также содержит кадастровые данные о типах и состоянии грунтов, корреляционные системы обработки изображений и оптимизации алгоритма обстрела, другие необходимые средства для уточнения расхода боеприпасов, определения координат цели, уточнение координат цели по окружающим предметам и ландшафту. Работа группового оборудования по получению вышеуказанной информации выходит за рамки настоящей заявки и приводится лишь в качестве иллюстрации. Вместе с подготовкой группового оборудования проводится экипировка бойца-наблюдателя автоматом с указанным встроенным оборудованием и приборами (фиг.1) с их проверкой и наладкой.
Процесс наблюдения, определения координат, связь с групповым устройством управления и вычислений 15, корректировку перемещения к цели осуществляют с помощью оснащенного указанными средствами индивидуального стрелкового оружия, например автомата (фиг.1), без применения каких-либо дополнительных систем. При этом координаты объекта или цели определяют с помощью цифровой модели рельефа местности, а именно: фиксируют с помощью прицела 1 отсканированный объект и определяют показания датчиков 5, 6, 7, 8, далее, передают их после обработки в индивидуальном устройстве управления 10 с помощью индивидуального приемопередатчика 13 и группового приемопередатчика 14 в групповое устройство управления и вычислений 15. По этой же цепочке устройств может передаваться и от дальномера 3 непосредственно на дисплей 9, а также в групповое устройство 15 изображение в поле дальномера 3 в момент измерения дальности, а от группового устройства управления 15 к дисплею 9 план взаимного расположения тех или иных объектов. По полученным собственным координатам бойца-наблюдателя и измеренным датчиками 5, 6 углам, а также по показанию устройства определения вертикали 7 восстанавливают положение линии наблюдения (линия визирования) на объект над цифровой моделью рельефа местности и вычисляют дальность до объекта как точки пересечения восстановленной линии визирования и цифровой модели рельефа. Тем самым получают полные координаты наблюдаемого объекта. Дальность до объекта в любое время суток, особенно для искусственных объектов, отсутствующих на цифровой модели рельефа местности, с последующей передачей групповому устройству управления и вычислений 15 для того или иного использования определяют с помощью лазерного дальномера 3. После обработки данных по дальности производятся расчеты координат цели, исходя из измеренных углов - азимута и угла места. Эти данные сравнивают с данными по целераспределению баз данных группового устройства управления и вычислений 15. Разностный сигнал передают на закрепленный на автомате индикатор-указатель азимутального поворота 12 таким образом, чтобы после его обработки в индивидуальном устройстве управления 10 боец-наблюдатель мог, поворачивая автомат, зрительно фиксировать момент совпадения линии визирования с указанным ему направлением движения в ходе перемещения или положением границы зоны ответственности по разнице в свечении элементов индикатора-указателя 12, расположенных по разные стороны ствола 4 автомата 2. В состав датчиков азимута 5 и угла места 6 входят две компоненты: микромеханическая компонента позволяет зафиксировать и непродолжительное время сохранять с необходимой точностью направление на выбранный на местности или созданный искусственно ориентир; другая компонента позволяет измерить относительный угол между направлением на цель и магнитным полем Земли. Устройство определения вертикали 7 может быть выполнено в виде акселерометра.
Тем самым, каждый боец-наблюдатель в группе непрерывно в ходе операции по показаниям указателя-индикатора азимутального поворота 12 и по демонстрационной картинке на дисплее 9 определяет соответственно как необходимый в данный момент курс движения к цели, так и непрерывно контролирует текущие изменения в пространственном расположении имеющихся в группе наблюдателей и цели или целей, используя это для координации своих действий в составе группы.
Кроме уже указанного, на основании полученных данных в устройстве группового управления и вычислений 15 производится расчет по расходу боеприпасов, требующихся для поражения цели, а также выбору взрывателя и типа снаряда.
Изобретение относится к дистанционному контролю места расположения и управлению перемещениями бойца-наблюдателя, съему координат наблюдаемого объекта и выполнению соответствующих воздействий на наблюдаемый на местности объект, что и является достигаемым техническим результатом. Сущность изобретения заключается в сканировании местности с фиксацией показаний датчиков азимута и угла места, а также фиксацией показаний устройства определения собственных координат бойца-наблюдателя при обнаружении им объекта наблюдения или цели, данные от которых поступают в индивидуальное устройство управления бойца-наблюдателя и далее через индивидуальные приемопередатчики поступают в устройство управления и вычислений группового оборудования, имеющего блок памяти, содержащий цифровую модель рельефа местности наблюдения и базу данных для целераспределения и их обновления. 2 н. и 2 з.п. ф-лы, 2 ил.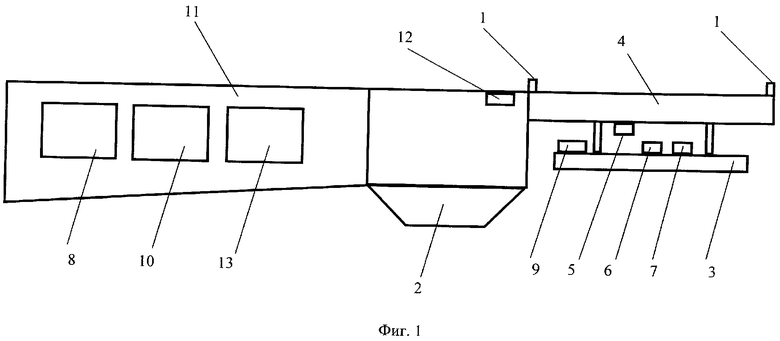
| СПОСОБ ОРИЕНТИРОВАНИЯ НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2247921C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 2004 |
|
RU2272254C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242019C2 |
| US 2004074132 A1, 22.04.2004 | |||
| Виброплощадка | 1974 |
|
SU510371A1 |
| US 5044107, 03.09.1991. | |||

