Изобретение относится к приборостроению, в частности, лазерным угломерно-дальномерным комплексам для ориентирования в отношении объекта с укрытых позиций.
Известна (см., напр., патент №2123165) оптико-лазерная система для прицеливания и дальнометрирования воздушных целей. Система состоит из лазерного излучателя с блоком накачки и приемника излучения, входящих в состав оптической следящей системы и дальномерного канала, а также блока вычислений. При этом прицельная следящая система содержит зеркало, установленное с возможностью поворота, положение которого определяется по сигналу, вырабатываемому блоком вычислений. Для уменьшения расходимости луча используется телескопический объектив. Недостатком системы является ее сравнительно узкое применение - в основном для ракет класса “воздух-воздух” и, тем самым, невозможность использования с укрытых позиций на местности для поиска и локализации объектов как наземных, так и воздушных в определенной системе координат. Кроме того, весь комплекс является довольно сложным и дорогостоящим.
Известно также локационное устройство (см., напр., патент РФ № 2032918). В него введены последовательно установленные и оптически сопряженные маломощный источник света, вращающееся однострочное оптико-механическое сканирующее устройство и контрольный фотоприемник, также введен датчик угломестных координат, вход которого соединен с выходом контрольного фотоприемника, а выход - со вторым входом схемы сравнения, при этом вращающееся однострочное оптико-механическое сканирующее устройство также оптически сопряжено с лазерным передатчиком и механически жестко связано с вращающимся измерителем азимута и угла места. Недостатком устройства является его ограниченное применение - для систем предупреждения столкновений. Кроме того, устройство является сложным по конструкции, поэтому им невозможно оснащать наблюдателя целей с укрытых позиций на местности.
Наиболее близкой к изобретению является оптико-электронная система поиска и сопровождения цели (патент РФ № 2155323), которая содержит подвижное зеркало с датчиком углов и приводами, спектроделительный фильтр, пеленгационный канал, формирующий сигнал рассогласования между оптической осью системы и направлением на цель, а также передающий и приемный лазерные каналы. В режиме поиска просмотр пространства целей осуществляется подвижным зеркалом по сигналам рассогласования между информациями пеленгационного канала и внешней системой целеуказания. Сигнал рассогласования между оптической осью системы и направлением на цель по двум координатам - азимуту и высоте подается на приводы подвижного зеркала, приводя изображение цели в центр поля зрения чувствительных площадок. Далее производится переход в режим слежения и дальнометрирования. Недостатком системы является возможность ее использования только для оружия с лазерным наведением и она, тем самым, не может применяться для наблюдения за объектами с укрытых для постороннего наблюдателя позиций на местности с определением дальности, азимута и угла места удаленного объекта.
Задачей для предлагаемого изобретения является создание простого и надежного прибора для определения дальности, азимута и угла места удаленного объекта с закрытых позиций во избежание прямого огневого поражения наблюдателя.
Техническим результатом изобретения является простота и надежность системы для измерения координат удаленного объекта вне его прямой видимости.
Технический результат достигается тем, что в оптической системе определения координат объекта, содержащей лазерный дальномер, подвижное зеркало, устройство съема азимута, блок управления, дальномер соединен с нижней частью перископа, а объектив дальномера расположен напротив нижнего зеркала перископа, плоское верхнее зеркало перископа с возможностью поворота вокруг горизонтальной оси, параллельной плоскости нижнего зеркала, служит датчиком угла места удаленного объекта и вместе с тем средством сканирования.
Кроме того, верхнее зеркало перископа снабжено датчиком съема угла.
Тем самым появляется возможность с укрытой, то есть защищенной от прямого огня и скрытой от постороннего наблюдения, позиции определять полярные координаты места нахождения удаленного объекта с последующим пересчетом в устройстве управления и индикации в любую заданную систему координат. При этом используемое средство является простым, надежным, дешевым и вместе с тем обеспечивает требуемую точность.
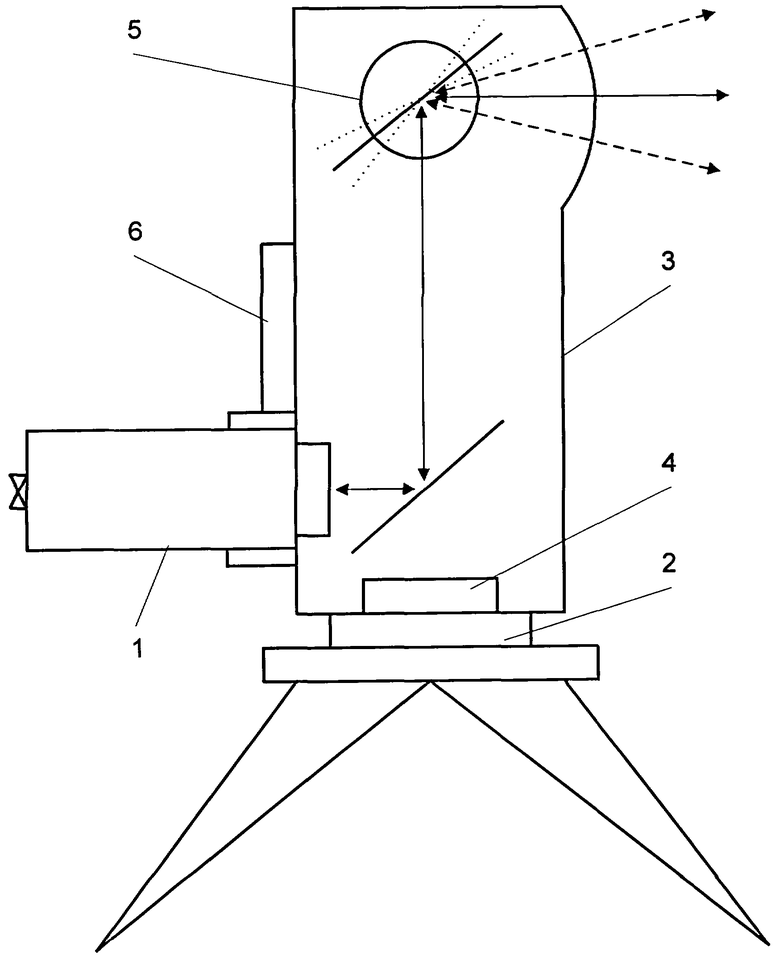
На чертеже дан в вертикальном разрезе вид сбоку оптической системы определения координат объекта.
Система содержит лазерный дальномер 1, устройство горизонтирования 2, перископ 3, устройство автоматического съема азимута 4, устройство автоматического съема угла места объекта в виде поворачивающегося верхнего плоского зеркала 5 перископа 3, которое вместе с нижним плоским зеркалом перископа 3 используется также для сканирования местности и передачи оптического изображения в пристыкованный к нижнему отверстию перископа 3 напротив его нижнего зеркала объектив дальномера 1. Снимаемая информация сосредоточивается в блоке управления 6, в качестве которого может использоваться соответствующий микропроцессор, и отображается соответствующим индикатором, встроенным в дальномер 1 или сам блок управления 6.
Заявленная система определения координат объекта работает следующим образом.
Для нахождения цели оператор, находящийся на укрытой позиции, осматривает окружающее пространство через визирное устройство лазерного дальномера 1 и перископ 3, установив прибор в горизонтальной плоскости с помощью устройства горизонтирования 2 и фиксирует на удаленном объекте. Посредством устройства автоматического съема азимута 4 производится определение азимута объекта. По углу визирования в вертикальной плоскости, фиксируемому датчиком угла поворота плоского верхнего зеркала 3 перископа 5, производится определение угла места наблюдаемого объекта. Для съема углов применяются малогабаритные датчики, например, вращающиеся трансформаторы, оптические и другие абсолютные датчики, имеющие инструментальную погрешность менее 1 минуты. Съем указанных координат производится одновременно с измерением дальности лазерным дальномером. Тем самым при фиксировании в поле наблюдения прибора объекта наблюдения у оператора появляется возможность, являясь невидимым для постороннего наблюдателя, таким простым и надежным средством произвести съем полярных координат объекта, их преобразование в требуемую систему координат с использованием кроме оптических средств блока управления 6 с отображением их на индикаторном устройстве.
Предложенная схема простого измерительного прибора открывает возможности по применению легких лазерных дальномеров для обеспечения сопровождения подвижных удаленных объектов при работе в полуавтоматическом режиме. При этом блок управления-индикации 6 должен быть подключен к автоматизированной системе управления и передавать в нее данные о координатах объекта.
Процесс работы при этом проводят следующим образом: оператор обнаруживает объект на дальностях, характерных для реального рельефа местности. Для равнинной части Европы дальность прямой видимости в 95% случаев составляет 1,8 км. Дальность лазерных дальномеров колеблется от 7,5 до 20 км и перекрывает в несколько раз ограничения по рельефу местности.
После обнаружения удаленного объекта, не выпуская его из поля зрения прибора, оператор делает несколько засечек последовательно изменяющихся координат объекта. Временные интервалы, через которые производятся засечки, определяются в основном временем накачки, которое может составлять 3 сек в стационарном режиме или 1 сек в форсированном режиме на протяжении 10 сек.
Полученные при этих измерениях координаты передаются в блок управления-индикации 6 и в автоматизированную систему управления, где на их основе вычисляется трасса удаленного объекта и может быть пролонгировано его положение в определенное время.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТИРОВАНИЯ НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2247921C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242019C2 |
| СПОСОБ КОНТРОЛИРУЕМОГО ОРИЕНТИРОВАНИЯ НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310881C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2274876C1 |
| СПОСОБ ОБСТРЕЛА ПЛОЩАДНОЙ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2239767C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2008 |
|
RU2381447C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| ОПТИЧЕСКИЙ ПРИБОР РАЗВЕДКИ | 2006 |
|
RU2324896C1 |
| ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ СО ВСТРОЕННЫМ ПАССИВНЫМ ДАЛЬНОМЕРОМ | 2021 |
|
RU2785957C2 |
Изобретение относится к области приборостроения, а именно к лазерным угломерно-дальномерным комплексам для ориентирования в отношении объекта с укрытых позиций. Оптическая система определения координат объекта содержит лазерный дальномер, верхнее подвижное плоское зеркало и нижнее плоское зеркало, устройство съема азимута, блок управления, горизонтирующее устройство, индикатор для отображения снимаемой информации. Дальномер соединен с нижней частью перископа. Объектив дальномера расположен напротив нижнего плоского зеркала перископа. Верхнее подвижное плоское зеркало перископа выполнено с возможностью поворота вокруг своей горизонтальной оси и служит для измерения угла места удаленного объекта и вместе с нижним плоским зеркалом перископа служит средством сканирования окружающего пространства. Технический результат состоит в упрощении и увеличении надежности системы для измерения координат удаленного объекта вне его прямой видимости. 1 з.п. ф-лы, 1 ил.
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2000 |
|
RU2155323C1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО НАБЛЮДЕНИЯ | 1997 |
|
RU2145433C1 |
| Масштабная линейка | 1929 |
|
SU17739A1 |
| СИСТЕМА НАБЛЮДЕНИЯ УДАЛЕННЫХ ОБЪЕКТОВ | 1995 |
|
RU2085979C1 |
| DE 3104318 A1, 26.08.1982 | |||
| US 4902128 А, 20.02.1990. | |||

