Изобретение относится к области измерительной техники, в частности к топогеодезии и навигации, а также может быть использовано при прохождении маршрута группами туристов, охотников и т.п.
Известна (см., напр., патент РФ №2123165) оптико-лазерная система для прицеливания и дальнометрирования воздушных целей. Система состоит из лазерного излучателя с блоком накачки и приемника излучения, входящих в состав оптической следящей системы, и дальномерного канала, а также блока вычислений. При этом прицельная следящая система содержит зеркало, установленное с возможностью поворота, положение которого определяется по сигналу, вырабатываемому блоком вычислений. Для уменьшения расходимости луча используется телескопический объектив.
Недостатком системы является ее сравнительно узкое применение - в основном для ракет класса "воздух-воздух" и, тем самым, невозможность использования с позиций на местности для поиска и локализации объектов как наземных, так и воздушных в определенной системе координат. Кроме того, весь комплекс является довольно сложным и дорогостоящим.
Известна оптико-электронная система поиска и сопровождения цели (патент РФ №2155323), которая содержит подвижное зеркало с датчиком углов и приводами, спектроделительный фильтр, пеленгационный канал, формирующий сигнал рассогласования между оптической осью системы и направлением на цель, а также передающий и приемный лазерные каналы. В режиме поиска просмотр пространства целей осуществляется подвижным зеркалом по сигналам рассогласования между информациями пеленгационного канала и внешней системой целеуказания. Сигнал рассогласования между оптической осью системы и направлением на цель по двум координатам - азимуту и высоте подается на приводы подвижного зеркала, приводя изображение цели в центр поля зрения чувствительных площадок. Далее производится переход в режим слежения и дальнометрирования.
Недостатком системы является необходимость использования в ней сложных дорогостоящих специальных оптических систем.
Наиболее близким техническим решением к предлагаемому изобретению является устройство для измерения сферических координат, содержащее лазерный дальномер с цифровым индикатором и блок измерения магнитного азимута и угла места, в котором блок измерения магнитного азимута и угла места выполнен в виде двух датчиков соответствующих углов, установленных в кардановом подвесе, каждый из которых состоит из диска с углоизмерительным кодом и считывающей оптотронной пары с излучателем и приемником, причем ось внешней рамки карданова подвеса установлена в корпусе лазерного дальномера параллельно оси визира, на внешней рамке по ее оси размещена оптотронная пара датчиков угла места, охватывающая углоизмерительный диск, который размещен на оси внутренней рамки, являющейся корпусом магнитного компаса, установленной перпендикулярно оси внешней рамки с смещением центра массы, на внутренней рамке размещена оптотронная пара датчиков магнитного азимута, охватывающая углоизмерительный диск, являющийся картушкой магнитного компаса, который размещен на внутренней оси внутренней рамки, установленной перпендикулярно оси внешней рамки и внешней оси внутренней рамки, при этом выходы датчиков углов соединены с соответствующими дополнительными входами цифрового индуктора (Патент РФ №1827136).
Недостатком указанного технического решения является невысокая точность и надежность измерения в связи с отсутствием учета изменения положения наблюдателя, а также низкое быстродействие прибора и информативность его выходных данных.
Техническим результатом изобретения является повышение точности измерения, расширение функциональных возможностей и увеличение быстродействия прибора при обеспечении считывания сферических координат объекта из положения «с рук» без прекращения наблюдения за объектом и местностью. Также предусматривается возможность сохранение цифрового изображения с записью времени съемки, координат наблюдателя и координат объекта.
Указанный технический результат достигается тем, что в устройство для измерения сферических координат удаленного объекта, содержащее лазерный дальномер с цифровым индикатором, магнитометр, введены оптико-электронный прибор, указатель курса и позиции наблюдателя, приемник GPS/Глонасс, бесплатформенный инерциальный блок, альтиметр и микропроцессор, причем оптико-электронный прибор, лазерный дальномер и указатель курса и позиции наблюдателя скреплены между собой жестко, а приемник GPS/Глонасс, бесплатформенный инерциальный блок и альтиметр подключены раздельно к входам микропроцессора и размещены вместе с ним в корпусе указателя курса и позиции наблюдателя.
Кроме того, в него может быть введен индикатор указателя курса и позиции наблюдателя и объекта, а сам указатель снабжен разъемами для связи с этим индикатором, антенной GPS/Глонасс и оптико-электронным прибором.
Кроме того, в него могут быть введены унифицированное посадочное место и оправа с полупрозрачной пластиной и дополнительным индикатором, причем унифицированное посадочное место жестко закреплено на корпусе оптико-электронного прибора, лазерный дальномер и указатель курса и позиции наблюдателя закреплены на указанном посадочном месте, а оправа с полупрозрачной пластиной и дополнительным индикатором установлена на объективе оптико-электронного прибора и снабжена разъемом для подключения индикатора указателя курса и позиции наблюдателя и объекта.
Кроме того, указатель курса и позиции наблюдателя может быть снабжен радиоинтерфейсом для связи с внешним компьютером.
Для способа определения координат удаленного объекта на местности указанный технический результат достигается тем, что в известном способе, заключающемся в измерении координат наблюдателя, расстояния до объекта, вычислении координат объекта и визуальном их представлении для наблюдателя, при измерении координат наблюдателя контролируют текущее положение прибора наблюдателя относительно местного горизонта и курса, вычисляют координаты объекта в микропроцессоре в соответствии с зависимостями:


HB=HA+Lsin(α)
где: φA, λA и HA - соответственно, широта, долгота и высота положения прибора наблюдателя,
φB, λB и HB - соответственно, широта, долгота и высота удаленного объекта,
α - угол тангажа α,
β - угол курса (угол между направлением на северный полюс и направлением на объект),
L - расстояние от наблюдателя до удаленного объекта,
R3=6378.1 км - радиус Земли,
а текущие результаты вычислений фиксируют на электронном изображении удаленного объекта и индикаторе.
Расчет курса и позиции объекта может осуществляться либо микропроцессором внутри указателя курса, либо компьютером, с которым осуществляется связь по радиоинтерфейсу.
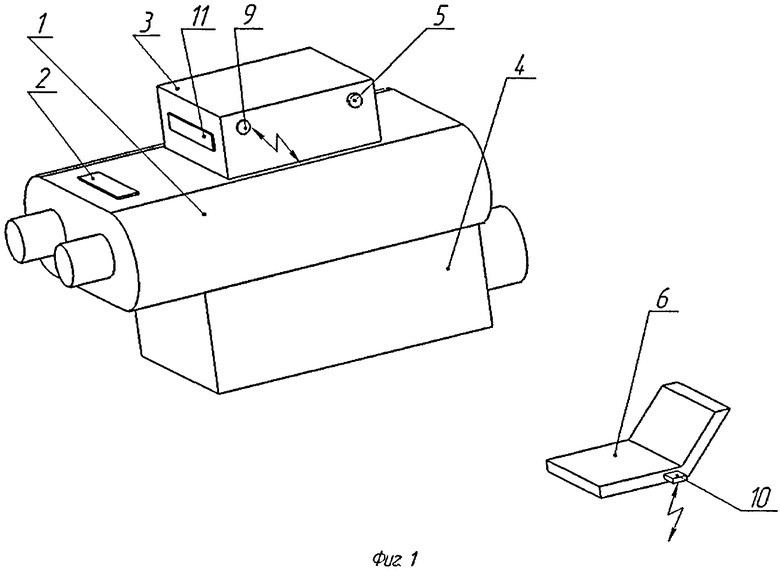
На фиг.1 показан общий вид устройства для вычисления сферических координат удаленного объекта.
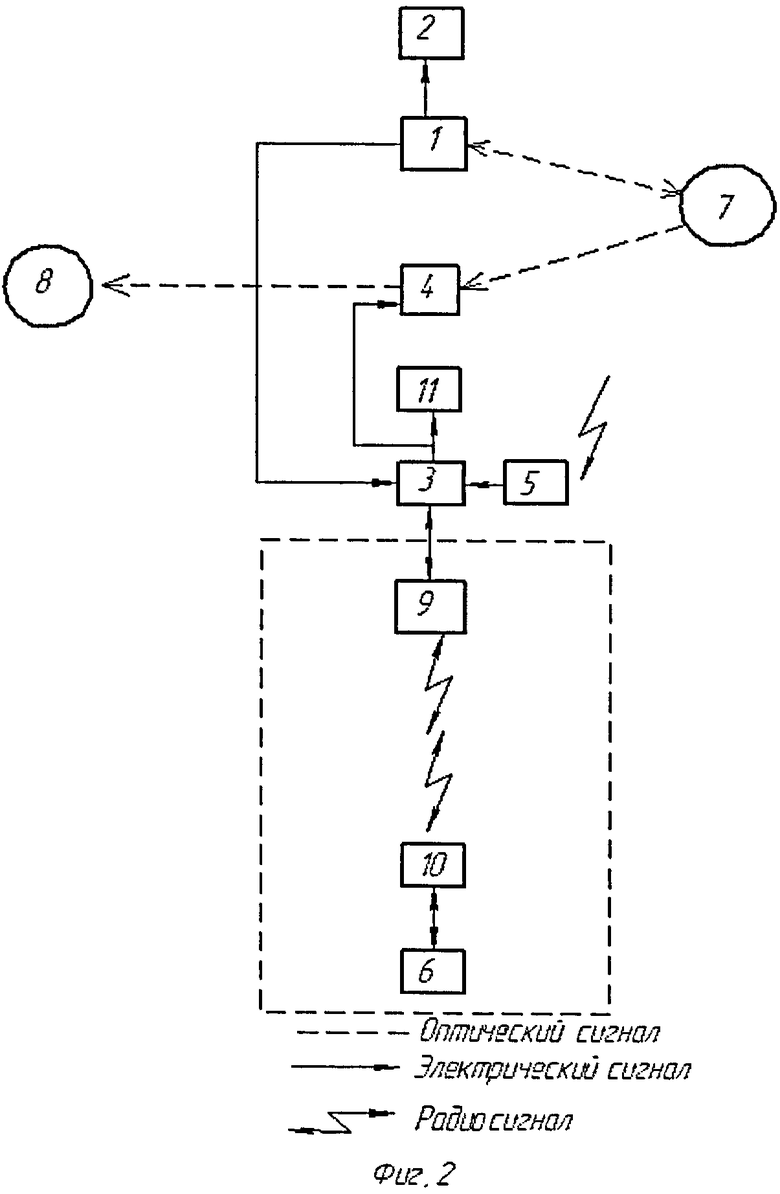
На фиг.2 показана функциональная схема устройства для вычисления сферических координат удаленного объекта.
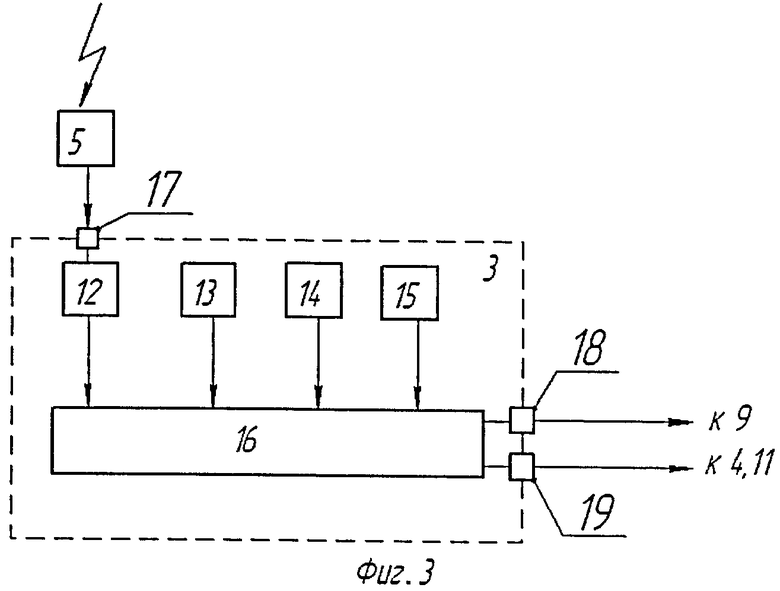
На фиг.3 показана функциональная схема указателя курса и позиции наблюдателя.
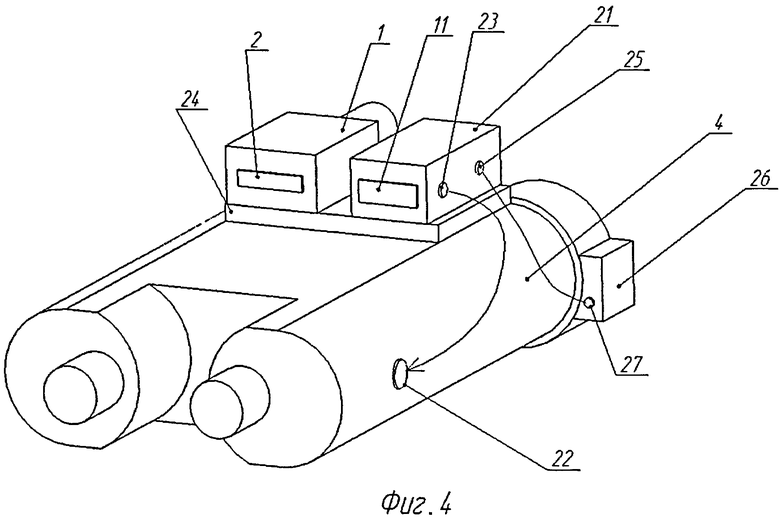
На фиг.4 показано выполнение устройства для вычисления сферических координат удаленного объекта с унифицированным посадочным местом.
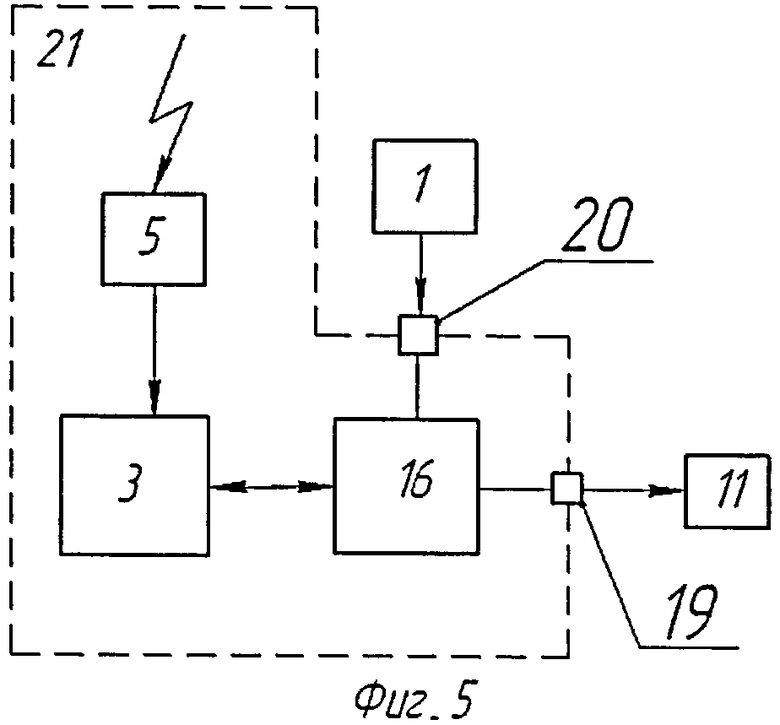
На фиг.5 показана функциональная схема интегрированного указателя курса и позиции оператора и объекта с использованием унифицированного посадочного места.
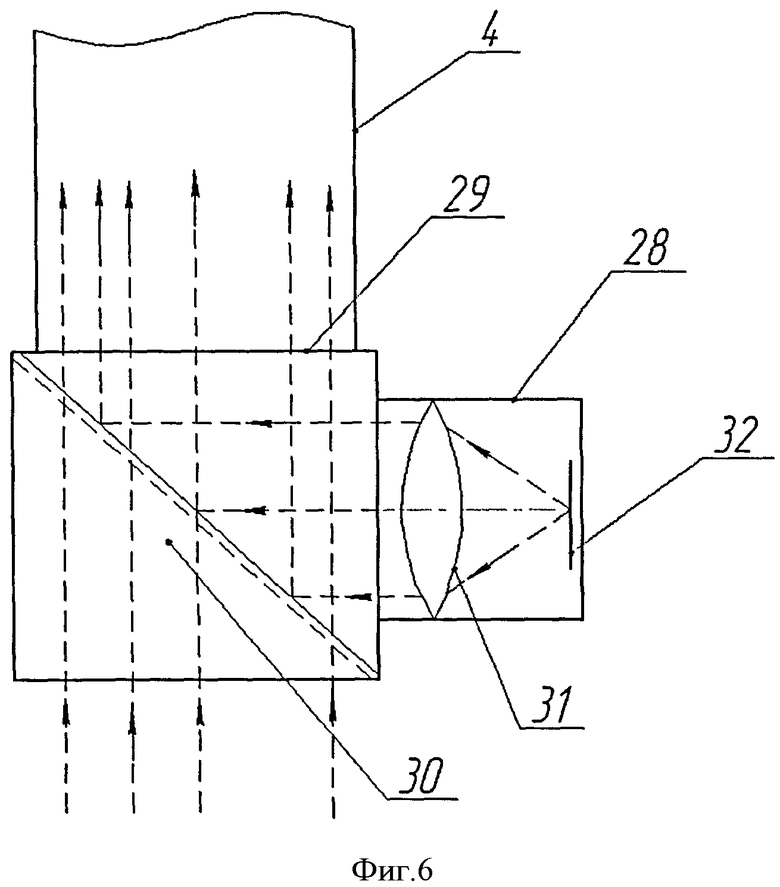
На фиг.6 показана оправа с полупрозрачной пластиной для отображения на изображении координат оператора и объекта.
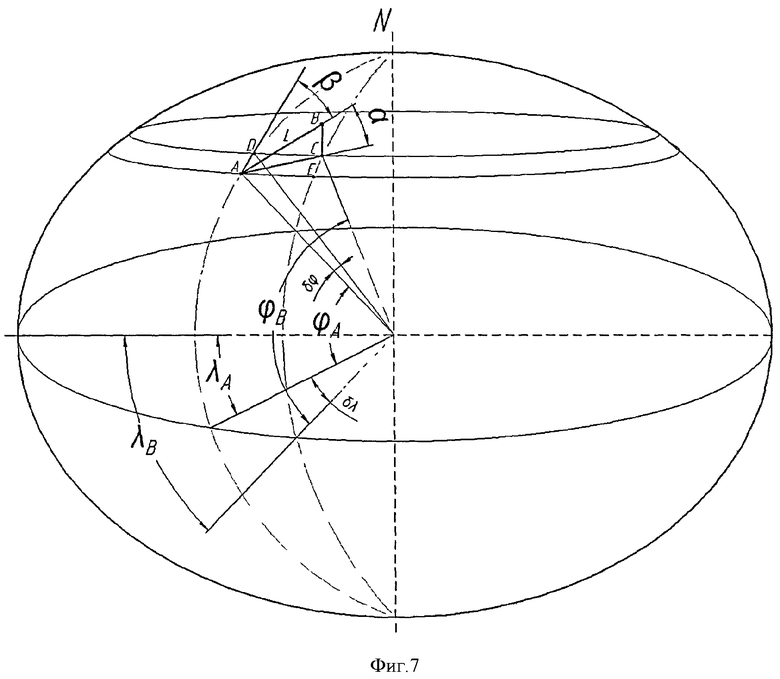
На фиг.7 показано формирование расчетных параметров для способа определения сферических координат удаленного объекта.
На фиг.1 приведены позиции:
1 - лазерный дальномер
2 - индикатор лазерного дальномера
3 - указатель курса и позиции наблюдателя
4 - оптико-электронный наблюдательный прибор
5 - антенна GPS/Глонасс
6 - компьютер
9 - радиоинтерфейс для связи с компьютером
10 - радиоинтерфейс для связи с указателем курса и позиции наблюдателя
11 - индикатор указателя курса и позиции оператора и объекта.
Устройство содержит лазерный дальномер 1 с цифровым индикатором 2. Внизу размещен оптико-электронный наблюдательный прибор 4 (фотоаппарат, видеокамера и др.), который осуществляет запись текущего видеоизображения и внизу каждого кадра ставится дата, время съемки, координаты наблюдателя и координаты объекта, который находится на перекрестии. Указатель курса и позиции 3 формирует информацию о положении наблюдателя: географическая широта, географическая долгота, магнитный курс, угол крена, угол тангажа и высота оптико-электронного наблюдательного прибора, а также параметры объекта наблюдения: географическая широта, географическая долгота, расстояние до него и время наблюдения. Выбор объекта производится наведением на него перекрестия, фиксацией положения прибора и нажатием на кнопку «Измерение». Видеоизображение и данные о курсе и позиции через радиоинтерфейс 9 передаются в компьютер, где данные обрабатываются и сохраняются. После вычисления координат удаленного объекта компьютер по радиоинтерфейсу передает координаты удаленного объекта указателю курса и позиции 3 и они отображаются на индикаторе 11. На индикаторе 2 отображается расстояние до объекта.
На фиг.2 приведено:
1 - лазерный дальномер
2 - индикатор лазерного дальномера
3 - указатель курса и позиции оператора
4 - оптико-электронный наблюдательный прибор
5 - антенна GPS/Глонасс
6 - компьютер
7 - объект
8 - наблюдатель
9 - радиоинтерфейс для связи с компьютером
10 - радиоинтерфейс для связи с прибором
11 - индикатор указателя курса и позиции оператора и объекта.
Оператор 8 наблюдает изображение объекта 7 на фоне окружающей местности. После того как оператор нажимает на кнопку «Измерить» лазерный дальномер 1 вычисляет расстояние до объекта и передает это расстояние указателю курса и позиции оперетатора 3. Эти данные через радиоинтерфейсы 9 и 10 отправляются в компьютер, который рассчитывает сферические координаты объекта и посылает их указателю курса и позиции оператора 3, после чего они отображаются на индикаторе 11.
На фиг.3 показаны:
5 - антенна GPS/Глонасс
4 - оптико-электронный наблюдательный прибор
9 - радиоинтерфейс для связи с компьютером
11 - индикатор указателя курса и позиции оператора и объекта
12 - приемник GPS/Глонасс
13 - бесплатформенный инерциальный блок
14 - магнитометр
15 - альтиметр (барометрический высотомер)
16 - микропроцессор
17 - разъем для подключения антенны GPS
18 - разъем для подключения радиоинтерфейса связи с компьютером
19 - разъем для подключения индикатора указателя курса и позиции.
Микропроцессор 16 осуществляет предварительную обработку данных, поступающих с датчиков 12, 13, 14, 15. Далее эти данные через радиоинтерфейс передаются в компьютер, который производит дальнейшую обработку данных. Бесплатформенный инерциальный блок 13 содержит (не показаны) три микромеханических гироскопа, три микромеханических акселерометра, ориентированных, соответственно, по трем взаимно перпендикулярным измерительным осям. По их показаниям блок 13 вычисляет углы крена и тангажа оптико-электронного наблюдательного прибора и передает в микропроцессор 16 указателя курса и позиции наблюдателя.
Устройство для вычисления сферических координат удаленного объекта с использованием унифицированного посадочного места показано на фиг.4.
На фиг.4 приведены:
1 - лазерный дальномер
2 - индикатор лазерного дальномера
4 - оптико-электронный наблюдательный прибор
11 - индикатор указателя курса и позиции оператора и объекта
21 - указатель курса и позиции оператора и объекта.
22 - разъем для подключения указателя курса и позиции оператора и объекта
23 - разъем для подключения оптико-электронного наблюдательного прибора
24 - унифицированное посадочное место
25 - разъем для подключения дополнительного индикатора
26 - оправа с полупрозрачной пластиной и дополнительным индикатором
27 - разъем для подключения индикатора указателя курса и позиции оператора и объекта
Лазерный дальномер 1 и указатель курса и позиции 21 установлены на унифицированное посадочное место, расположенное на оптико-электронном наблюдательном приборе. Таким прибором может быть видеокамера, фотоаппарат, прибор ночного видения, тепловизор и др. В случае видеокамеры ведется постоянная запись координат оператора и объекта. Эта информация может отображаться в углу кадра или записываться в отдельный файл. В остальных случаях записывается только один кадр, для записи которого оператор фиксирует положение прибора и нажимает на кнопку «Измерить». Информация о времени съемки, координатах оператора и объекта может быть отображена в углу картинки или записанной в файл. Расчет координат осуществляется микропроцессором, находящимся в указателе курса и позиции оператора и объекта 21, функциональная схема которого приведена на фиг.5
На фиг.5 приведены:
1 - лазерный дальномер
3 - указатель курса и позиции оператора
5 - антенна GPS/Глонасс
11 - индикатор указателя курса и позиции оператора и объекта
16 - микропроцессор
19 - разъем для подключения индикатора указателя курса и позиции
20 - разъем для подключения лазерного дальномера.
На фиг.6 показана оправа с полупрозрачной пластиной для отображения на изображении координат оператора и объекта, где цифрами обозначены:
4 - оптико-электронный наблюдательный прибор
29 - оправа с полупрозрачной пластиной и дополнительным индикатором
28 - корпус индикатора
30 - полупрозрачная пластина
31 - оптическая система для формирования изображения индикатора
32 - индикатор курса и позиции оператора и объекта.
Изображение индикатора 32, формируемое оптической системой 31, преломляется полупрозрачной пластиной 30 и поступает в объектив оптико-электронного наблюдательного прибора вместе с изображением удаленного объекта. Оператор видит и изображение местности, и координаты удаленного объекта.
Способ измерения координат удаленного объекта на местности практически осуществляется тем, что наблюдатель производит сканирование местности оптико-электронным наблюдательным прибором с контролем и фиксацией в этот момент положения прибора относительно местного горизонта и курса, его координат и расстояния от объекта до наблюдателя, которые поступают в микропроцессор, вычисляются координаты объекта, запоминаются и фиксируются на электронном изображении объекта и индикаторе.
На фиг.7 точкой А обозначено положение оператора, точкой В - положение объекта. Пусть известны широта φA, долгота λA и высота HA точки А, расстояние L до точки В, угол курса β (угол между направлением на северный полюс и направлением на объект), угол тангажа α и угол крена γ. Поскольку максимальная измеряемая дальность не превышает 3 км, то будем считать, что точки A, E, C, D расположены на плоскости.
При γ=0 высота точки В вычисляется по формуле HB=HA+Lsin(α).
Проекция расстояния L на наклонную плоскость вычисляется по формуле Lпр=AC=Lcos(α).
Приращение широты δφ=φB-φA определим их треугольника ADO по теореме косинусов
 ,
,
где AD=AC·sin(β), R3=6378.1 км - радиус земли.
Приращение долготы δλ=λB-λA определим из треугольника ADC по теореме косинусов
 ,
,
где AE=AC·cos(β).
Итак, формулы для расчета координат удаленного объекта имеют вид:


HB=HA+Lsin(α).
Таким образом достигнут технический результат изобретения в виде повышения точности измерения, расширения функциональных возможностей и увеличения быстродействия прибора при обеспечении считывания сферических координат объекта из положения «с рук» без прекращения наблюдения за объектом и местностью. Также обеспечена возможность сохранения цифрового изображения с записью времени съемки, координат наблюдателя и координат объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ УКЛОНОВ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТОВ | 2008 |
|
RU2382986C2 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| СПОСОБ КОНТРОЛЯ СТЕПЕНИ АДАПТАЦИИ СВЕТОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ И КОНТРОЛЬНО-ПРОВЕРОЧНЫЙ ПРИБОР | 2013 |
|
RU2540447C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЕДЕНИЕМ СНАЙПЕРСКОГО ОГНЯ | 2011 |
|
RU2474782C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО (НАДВОДНОГО) ОБЪЕКТА | 2020 |
|
RU2749194C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2002 |
|
RU2247941C2 |
| Комплекс для определения пространственных координат удаленного объекта, расположенного на местности | 2020 |
|
RU2744427C1 |
Изобретения относятся к области измерительной техники и могут быть использованы при прохождении маршрута группами туристов, охотников и т.п. Технический результат - расширение функциональных возможностей. Для достижения данного результата в устройство введены оптико-электронный прибор, указатель курса и позиции наблюдателя, приемник GPS/Глонасс, бесплатформенный инерциальный блок, альтиметр и микропроцессор. Причем оптико-электронный прибор, лазерный дальномер и указатель курса и позиции наблюдателя скреплены между собой жестко. Приемник GPS/Глонасс, бесплатформенный инерциальный блок и альтиметр подключены раздельно к входам микропроцессора и размещены в корпусе указателя курса и позиции наблюдателя. Кроме того, в него введен индикатор указателя курса и позиции наблюдателя и объекта. Указатель снабжен разъемами для связи с этим индикатором, антенной GPS/Глонасс и оптико-электронным прибором. 2 н. и 3 з.п. ф-лы, 7 ил.
1. Устройство для измерения сферических координат удаленного объекта, содержащее лазерный дальномер с цифровым индикатором, магнитометр, отличающееся тем, что в него введены оптико-электронный прибор, указатель курса и позиции наблюдателя, приемник GPS/Глонасс, бесплатформенный инерциальный блок, альтиметр и микропроцессор, причем оптико-электронный прибор, лазерный дальномер и указатель курса и позиции наблюдателя скреплены между собой жестко, а приемник GPS/Глонасс, бесплатформенный инерциальный блок и альтиметр подключены раздельно к входам микропроцессора и размещены вместе с ним в корпусе указателя курса и позиции наблюдателя.
2. Устройство по п.1, отличающееся тем, что в него введен индикатор указателя курса и позиции наблюдателя и объекта, а сам указатель снабжен разъемами для связи с этим индикатором, антенной GPS/Глонасс и оптико-электронным прибором.
3. Устройство по п.2, отличающееся тем, что в него введены унифицированное посадочное место и оправа с полупрозрачной пластиной и дополнительным индикатором, причем унифицированное посадочное место жестко закреплено на корпусе оптико-электронного прибора, лазерный дальномер и указатель курса и позиции наблюдателя закреплены на указанном посадочном месте, а оправа с полупрозрачной пластиной и дополнительным индикатором установлена на объективе оптико-электронного прибора и снабжена разъемом для подключения индикатора указателя курса и позиции наблюдателя и объекта.
4. Устройство по п.2, отличающееся тем, что указатель курса и позиции наблюдателя снабжен радиоинтерфейсом для связи с внешним компьютером.
5. Способ определения координат удаленного объекта на местности, заключающийся в измерении координат наблюдателя, расстояния до объекта, вычислении координат объекта и визуальном их представлении для наблюдателя, отличающийся тем, что при измерении координат наблюдателя контролируют текущее положение прибора наблюдателя относительно местного горизонта и курса, вычисляют координаты объекта в микропроцессоре в соответствии с зависимостями:
HB=HA+Lsin(α),
где φA, λA и HA - соответственно широта, долгота и высота положения прибора наблюдателя,
φB, λB и НB - соответственно широта, долгота и высота удаленного объекта,
α - угол тангажа α,
β - угол курса (угол между направлением на северный полюс и направлением на объект),
L - расстояние от наблюдателя до удаленного объекта,
R3=6378.1 км - радиус Земли,
а текущие результаты вычислений фиксируют на электронном изображении удаленного объекта и индикаторе.
| RU 1827136 A3, 10.03.1996 | |||
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2123165C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2000 |
|
RU2155323C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2274876C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242019C2 |

