Предлагаемый способ относится к радиотехнике и может быть использован в цифровых системах связи, в частности, в устройствах синхронизации и приема фазоманипулированных (ФМн) сигналов.
Известны способы и устройства приема шумоподобных сигналов (авт. свид. СССР №177471, 451166, 491187, 543194, 860276, 1417206; патенты РФ №2085036, 2011299, 2106068, 2168869, 2121756; патенты США №4146841, 4811363, 4912422; патенты ФРГ №2646255, 3935911; Петрович Н.П. и др. Система связи с шумоподобными сигналами. - M.: Сов. радио, 1969, с.94, рис.38.а; Дж. Спилкер. Цифровая спутниковая связь. - M.: Связь, 1979, с.281; Варакин Л.Е. Системы связи с шумоподобными сигналами. - M.: Связь, 1985, с.18, рис.1.9.в и другие).
Из известных способов наиболее близким к предлагаемому является "Способ автокорреляционного приема шумоподобных сигналов" (патент РФ №2121756, Н 04 В 1/20, 1988), который и выбран в качестве прототипа.
Данный способ заключается в перемножении принимаемого сигнала с опорным сигналом и интегрировании полученного произведения, при этом опорный сигнал формируют путем попарного перемножения задержанных элементов принятого сигнала и полученных произведений, задержка элементов принятого сигнала осуществляется на интервалы времени, кратные тактовому периоду, и коэффициенты кратности соответствуют суммируемым разрядам в рекуррентном соотношении, а каждое задержанное значение или полученное произведение используется в качестве сомножителя только один раз. Способ обеспечивает прием шумоподобных сигналов только с известным рекуррентным соотношением.
Однако реализация известного способа возможна только при априорном знании рекуррентного соотношения и тактового периода принимаемых сигналов.
Технической задачей изобретения является обеспечение приема шумоподобных сигналов с априорно неизвестной внутренней структурой.
Поставленная задача решается тем, что согласно способу автокорреляционного приема шумоподобных сигналов, заключающегося в перемножении принимаемого сигнала с опорным сигналом, измеряют длительность принимаемого сигнала, осуществляют частотное детектирование принимаемого сигнала, выделяя тем самым моменты скачкообразного изменения фазы, определяют количество и величину тактовых периодов, опорный сигнал формируют путем задержки принимаемого сигнала на время τ з1=К1τ э, кратное тактовому периоду τ э, выделяют суммарное напряжение, перемножают его с принимаемым сигналом, задержанным на время τ з2=К2τ э, кратное тактовому периоду τ э, выделяют напряжение разности частоты, перемножают его с принимаемым сигналом, задержанным на время τ , которое периодически изменяют по линейному закону, выделяют низкочастотное напряжение, пропорциональное автокорреляционной функции, сравнивают его с пороговым уровнем, при превышении порогового уровня изменят циклический сдвиг, по которому определяют кодовую структуру принимаемого сигнала.
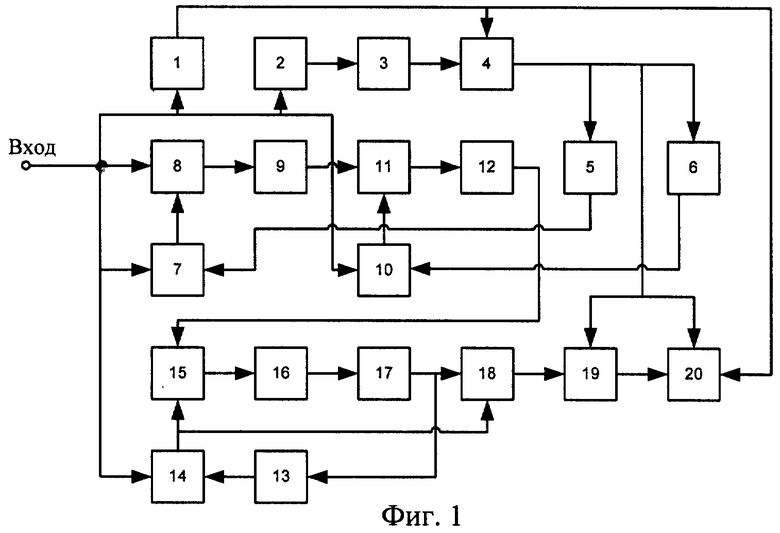
Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг.1. Временные диаграммы, поясняющие сущность предлагаемого способа, изображены на фиг.2.
Устройство содержит последовательно подключенные к его входу частотный детектор 2, счетчик 3 импульсов, первый арифметический блок 4, второй вход которого через измеритель 1 длительности сигнала соединен с входом устройства, первый масштабирующий перемножитель 5, первая линия 7 задержки, второй вход которой соединен с входом устройства, первый перемножитель 8, второй вход которого соединен с входом устройства, первый полосовой фильтр 9, второй перемножитель 11, второй вход которого через вторую линию 10 задержки соединен с входом устройства и вторым масштабирующим перемножителем 6, второй полосовой фильтр 12, второй вход которого через третью линию 14 задержки соединен с входом устройства и выходом генератора 13 пилообразного напряжения, фильтр 16 нижних частот, пороговый блок 17, ключ 18, второй вход которого соединен с выходом линии 14 задержки, второй арифметический блок 19, второй вход которого соединен с выходом первого арифметического блока 4, и блок 20 регистрации, второй и третий входы которого соединены с выходом измерителя 1 длительности сигнала и арифметического блока 4. Сущность способа автокорреляционного приема шумоподобных сигналов заключается в следующем.
Предположим, что в качестве модулирующей функции используется псевдослучайная последовательность (ПСП), символы которой описываются рекуррентным соотношением
хi=а1хi-1⊕а2xi-2⊕...⊕аmxi-m,
где аi={0,1} - коэффициенты формирующего полинома
А(Х)=Х0⊕а1Х1⊕а2X2⊕...⊕amXm,
⊕ - знак сложения по модулю два, m - разрядность псевдослучайной последовательности, период которой определяется как N=2m-1.
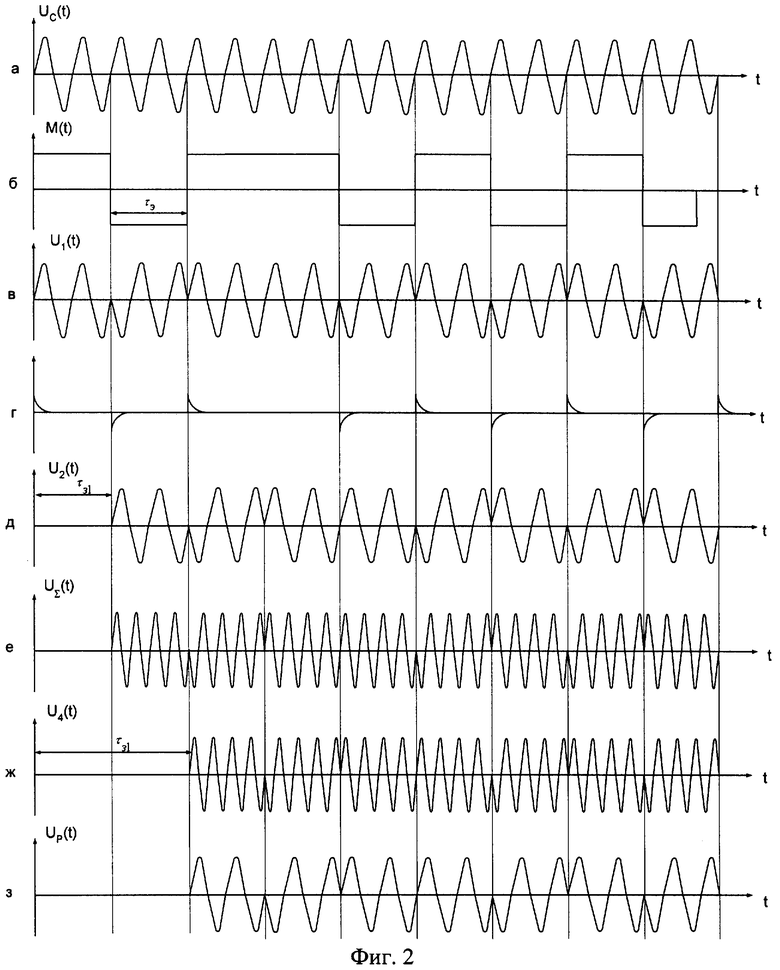
Для передачи по каналам связи такой последовательности M(t) (фиг.2, б) манипулируют по фазе высокочастотное гармоническое колебание (фиг.2, а)
Uc(t)=Vc×cos(ω ct+ϕ c), 0≤ t≤ <Тc
где Vc, ω c, ϕ c, Тc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания;
в результате образуется фазоманипулированный (ФМн) сигнал (шумоподобный сигнал) (фиг.2, в)
U1(t)=Vc×cos(ω ct+ϕ c(t)+ϕ c), 0≤ t≤ Тc
где ϕ k(t)={0, π } - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t) (ПСП) (фиг.2, б), причем ϕ k(t)=const при кτ э<t<(к+1)τ э, и может изменяться скачком при t=кτ , т.е. на границах между элементарными посылками (к=1,2... N-1); τ э, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тc(Тc=Nτ э).
В месте приема ФМн-сигнал поступает на входы измерителя 1 длительности сигнала, частотного детектора 2, перемножителя 8, линий 7, 10, 14 задержки.
На выходе частотного детектора 2 образуются короткие разнополярные импульсы (фиг.2, г), временное положение которых соответствует моментам скачкообразного изменения фазы принимаемого ФМн-сигнала U1(t) (фиг.2, в). Эти импульсы поступают на вход счетчика 3 импульсов, где подсчитывается число v скачков фазы. Между числом скачков фазы v и количеством N элементарных посылок существует следующая зависимость
ν =0,5× (N-1).
Число скачков фазы ν , подсчитанное счетчиком 3, поступает на первый вход арифметического блока 4, на второй вход которого подается измеренная измерителем 1 длительность Тc сигнала. В арифметическом блоке 4 определяется длительность элементарных посылок τ э (тактовый период)

Одновременно принимаемый ФМн-сигнал U1(t), (0 (фиг.2, в) поступает на первый вход перемножителя 8. Значение τ э, через масштабирующие перемножители 5 и 6 поступает на управляющие входы линий 7 и 10 задержки соответственно, где устанавливаются задержки:
τ з1=k1×τ э, τ з1=k2×τ э,
кратные тактовому периоду τ э. На второй вход перемножителя 8 подается принимаемый ФМн-сигнал, задержанный на величину τ з1 (фиг.2, д), который является опорным сигналом
U2(t)=U1(t-τ з1)=Vc×cos[ω c(t-τ з1)+ϕ k(t-τ з1)+ϕ c], 0≤ t≤ Tc.
На выходе перемножителя 8 образуется следующее колебание
U3(t)=U3×cos[2ω ct-ω cτ з1+ϕ k(t)-ϕ k(t-τ з1)+2ϕ c]+U3×cos[ω cτ з1+ϕ k(t)-ϕ k(t-τ з1)], 0≤ t≤ Tc
где  ;
;
К - коэффициент передачи перемножителя из которого полосовым фильтром 9, настроенным на 2ω c, выделяется суммарное напряжение (фиг.2, е)
UΣ t)=U3×cos[2ω ct-ω cτ з1+ϕ k(t)-ϕ k(t-τ з1)+2ϕ c], 0≤ t≤ Tc,
которое поступает на первый вход перемножителя 11, на второй вход которого подается принимаемый ФМн-сигнал, задержанный на величину τ з2 (фиг.2, ж) линией 10 задержки
U4(t)=U1(t-τ з2)=Vc×cos[ω c(t-τ з2)+ϕ k(t-τ з2)+ϕ c], 0≤ t≤ Tc.
На выходе перемножителя 11 образуется следующее колебание
U5(t)=V5×cos[3ω ct-ω c(τ з1+τ з2)+ϕ k(t)+ϕ k(t-τ з1)+ϕ k(t-τ з2)+3ϕ c]+V5×cos[ω ct+ω c(τ з2-τ з1)+3ϕ c]+V5×cos[ω ct+ω c(τ з2-τ з1)+ϕ k(t)+ϕ k(t-τ з1)-ϕ k(t-τ з2)], 0≤ t≤ Tc,
где  ;
;
из которого полосовым фильтром 12, настроенным на ω c, выделяется напряжение разности частоты (фиг.2, з)
Up(t)=V5×cos[ω ct+ω c(τ з2-τ з1)+ϕ k(t)+ϕ k(t-τ з1)-ϕ k(t-τ з2)], 0≤ t≤ Тc,
манипулируемая фаза которого имеет следующий вид
ϕ kp(t)=ϕ k(t)+ϕ k(t-τ з1)-ϕ k(t-τ з2)=ϕ k(t-θ τ э), где θ - циклический сдвиг, выраженный числом тактовых периодов (элементарных посылок).
Напряжение Up(t) с выхода полосового фильтра 12 поступает на первый перемножитель 15, на второй вход которого подается принимаемый ФМн-сигнал, задержанный на величину τ с помощью линии 14 задержки, которая периодически перестраивается по линейному закону с помощью генератора 13 пилообразного напряжения,
U6(t)=U1(t-τ )=Vc×cos[ω c(t-τ )+ϕ k(t-τ )+ϕ c], 0≤ t≤ Tc,
где τ - переменное значение величины задержки линии 14 задержки. На выходе перемножителя 15 образуется следующее напряжение
U7(t)=V7×cos[2ω ct+ω c(τ з2-τ з1+τ )+ϕ k(t)+ϕ k(t-θ τ э)+2ϕ c]+V7×cos[ω c(τ з2-τ з1+τ )+ϕ k(t-θ τ э)-ϕ k(t-τ )], 0≤ t≤ Tc,
где  .
.
Фильтром 16 нижних частот выделяется низкочастотное напряжение, пропорциональное автокорреляционной функции,
Uн(t)=Vн×cos[ω c(τ з2-τ з1+τ )+ϕ k(t-τ )], 0≤ t≤ Tc.
которое сравнивается с пороговым уровнем Vпор в пороговом блоке 17. Пороговое напряжение Vпор превышается только при максимальном значении напряжения Uн(t), которое получается при выполнении следующего условия
τ 0=θ τ э, ω c×(τ з2-τ з1+θ τ э)=2π К, К=1, 2, 3...
В случае превышения порогового уровня Vпор пороговый блок 17 формирует постоянное напряжение, которое поступает на управляющий вход генератора 13 пилообразного напряжения, прекращая его перестройку, и на управляющий вход ключа 18, открывая его. В исходном состоянии ключ 18 всегда закрыт.
При этом значении величины задержки τ 0=θ τ э, соответствующее максимуму автокорреляционной функции R(τ ), через открытый ключ 18 поступает в арифметический блок 19, куда поступает и значение длительности τ э элементарных посылок с выхода арифметического блока 4. В арифметическом блоке 19 определяется циклический сдвиг
 ,
,
который фиксируется блоком 20 регистрации, где фиксируются также измеренные значения длительности τ э элементарных посылок и длительности Тc принимаемого ФМн-сигнала. Указанный сдвиг устанавливает однозначное соответствие между кодовой структурой принимаемого ФМн-сигнала и функцией преобразования, которая задается параметрами τ з1 и τ з2:
θ ↔ θ [А(Х),В(Х),]
где А(Х) - формирующий полином, определяющий кодовую структуру принимаемого ФМн-сигнала;
В(Х)=В0Х0+B1X1+... +ВnХn - функция преобразования, номера нулевых коэффициентов которой определяются как  и
и  , а коэффициент В0=1.
, а коэффициент В0=1.
Так, например, для τ з1=2τ э и τ з2=3τ э (θ =8)
A(X)=X0⊕X2⊕X5;
B(X)=X0⊕X2⊕X3.
Измерив циклический сдвиг θ , по таблице соответствия можно определить кодовую структуру (закон фазовой манипуляции) принимаемого ФМн-сигнала.
Таким образом, предлагаемый способ по сравнению с прототипом обеспечивает прием шумоподобных сигналов с априорно неизвестной кодовой структурой. Это достигается путем измерения циклического сдвига θ , который устанавливает однозначное соответствие между кодовой структурой принимаемого ФМн-сигнала и функцией преобразования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОКОРРЕЛЯЦИОННОГО ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 2015 |
|
RU2595565C1 |
| СПОСОБ АВТОКОРРЕЛЯЦИОННОГО ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 2005 |
|
RU2296432C1 |
| ЦИФРОВОЙ ОБНАРУЖИТЕЛЬ СЛОЖНЫХ СИГНАЛОВ | 2004 |
|
RU2264043C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2003 |
|
RU2240950C1 |
| СПОСОБ ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2012 |
|
RU2486683C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И МЕСТОПОЛОЖЕНИЯ СПУТНИКА ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ГЛОНАСС И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518174C2 |
| СПОСОБ АВТОКОРРЕЛЯЦИОННОГО ПРИЕМА ШУМОПОДОБНОГО СИГНАЛА | 2006 |
|
RU2309550C1 |
| УСТРОЙСТВО ДЛЯ ОПОВЕЩЕНИЯ О ПАВОДКЕ ИЛИ СЕЛЕ | 2003 |
|
RU2235364C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2248896C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
Изобретение относится к радиотехнике и может быть использовано в цифровых системах связи, в частности, в устройствах синхронизации и приёма фазоманипулированных (ФМн) сигналов. Для достижения технического результата, заключающегося в обеспечение приёма шумоподобных сигналов с априорно неизвестной кодовой структурой, перемножают принимаем сигнал с опорным сигналом, измеряют длительность принимаемого сигнала, осуществляют частотное детектирование принимаемого сигнала, выделяя тем самым моменты скачкообразного изменения фазы, определяют количество и величину тактовых периодов, опорный сигнал формируют путём задержки принимаемого сигнала на время τ З1=K1τ э, кратное тактовому периоду τ э, выделяют суммарное напряжение, перемножают его с принимаемым сигналом, задержанным на время τ З2=K2τ э, кратное тактовому периоду τ э, выделяют напряжение разности частоты, перемножают его с принимаемым сигналом, задержанным на время τ , которое периодически изменяют по линейному закону, выделяют низкочастотное напряжение, пропорциональное автокорреляционной функции, сравнивают его с пороговым уровнем, при превышении порогового уровня измеряют циклический сдвиг, по которому определяют кодовую структуру принимаемого сигнала. 2 ил.
Способ автокорреляционного приема шумоподобных сигналов, заключающийся в перемножении принимаемого сигнала с опорным сигналом, отличающийся тем, что измеряют длительность принимаемого сигнала, осуществляют частотное детектирование принимаемого сигнала, выделяя тем самым моменты скачкообразного изменения фазы, определяют количество и величину тактовых периодов, опорный сигнал формируют путем задержки принимаемого сигнала на время τ З1=K1τ э, кратное тактовому периоду τ э, выделяют суммарное напряжение, перемножают его с принимаемым сигналом, задержанным на время τ З2=K2τ э, кратное тактовому периоду τ э, выделяют напряжение разности частоты, перемножают его с принимаемым сигналом, задержанным на время τ , которое периодически изменяют по линейному закону, выделяют низкочастотное напряжение, пропорциональное автокорреляционной функции, сравнивают его с пороговым уровнем, при превышении порогового уровня измеряют циклический сдвиг, по которому определяют кодовую структуру принимаемого сигнала.
| СПОСОБ АВТОКОРРЕЛЯЦИОННОГО ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 1988 |
|
RU2121756C1 |
| SU 1297238 А2, 15.03.1987 | |||
| Автокорреляционный измеритель параметров псевдослучайного фазоманипулированного сигнала | 1985 |
|
SU1252954A2 |
| Автокорреляционный измеритель параметров псевдослучайного фазоманипулированного сигнала | 1986 |
|
SU1336257A2 |
| US 4512024, 16.04.1985. | |||

